单相CHBR改进型无网压传感器直接功率控制
2023-11-02薄天赐马磊陈妍刘浩然彭林廖庸邑
薄天赐, 马磊, 陈妍, 刘浩然, 彭林, 廖庸邑
(西南交通大学 电气工程学院,四川 成都 611756)
0 引 言
单相级联H桥整流器/变换器具备灵活性高、谐波含量少、容错性强等优点[1],已被广泛应用于电力电子变压器(power electronic transformer,PET)[2-3]、光伏并网系统[4-5]等领域。单相级联H桥整流器控制系统主要可以分成两部分,即双闭环控制(内环、外环)和电压平衡控制。同单相脉冲宽度调制(pulse width modulation,PWM)整流器相似,双闭环控制的目标主要是保证系统单位功率因数运行以及直流侧电压恒定。电压平衡控制则确保各模块间的直流侧电容电压相互平衡。
在双闭环控制中,电压外环的控制对象为各模块直流侧电压之和,通常采用一个比例积分(proportional-integral,PI)控制器进行控制。而内环控制方法可分为电流控制和功率控制两种。其中,电流控制主要包括瞬态直接电流控制[6]、比例谐振(proportional resonant,PR)控制[7]、DQ解耦电流控制[8]等。瞬态直接电流控制结构简单,但不能无误差跟踪网侧交流信号。PR控制能够无误差地跟踪50 Hz网侧电流信号,但对网压频率波动比较敏感。DQ解耦电流控制稳态性能较好,但动态响应速度较慢。
与电流控制不同,直接功率控制(direct power control,DPC)以网侧有功功率和无功功率为控制对象,拥有控制结构简单、电流波形质量高、响应速度快等优点[9],得到诸多学者的广泛关注。基于滞环开关表[10]的DPC是一种较为经典的控制策略,其动态响应快、鲁棒性强。但该算法没有使用调制器,这就导致系统开关频率不固定、网侧电流谐波分布较广,很难通过设计滤波器来消除谐波。为解决开关频率不固定问题,PWM技术被引入到直接功率控制当中,实现了定频DPC[11-12]。文献[11]提出了一种恒频滞环DPC算法,该算法固定了开关频率,并提高了整流器系统在网压畸变下的稳态性能。功率前馈解耦DPC方法[12]用2个PI控制器对有功和无功功率进行解耦控制,并通过调制产生PWM信号。该方法系统开关频率固定,并在一定程度上改善了动态性能。然而,在传统功率前馈解耦控制框架下只能够得出调制信号的dq轴分量。要得到静态坐标系下的调制信号仍然需要αβ/dq旋转坐标逆变换,这就限制了动态性能的提升[13]。
另一方面,无论电流控制还是功率控制,其实现都依赖于网侧电压的提取,需要获取网压的幅值和相位等信息。网压信息一般通过网侧电压传感器和锁相环(phase locked loop,PLL)来获取。实际工程中,在设备处安装网压传感器会使得布线方案更为复杂[14]、硬件成本变高。并且实际工况复杂,网压传感器容易发生故障,进而导致控制系统崩溃,影响设备和人身安全。因此,无网侧电压传感器控制[15-21]受到了国内外学者的广泛关注。文献[15]以三相整流器为对象,提出了一种基于单位功率因数的网压信号直接估算方法,但该方法在负载变化时难以稳定运行。文献[16]提出了一种基于线电流计算的网压估算方法,但该方法涉及对电流信号的微分运算,容易产生噪声,增加了控制回路的失真。而虚拟电网磁链信号对测量的干扰有良好抑制作用,所以基于虚拟磁链观测器的整流器无电网电压传感器控制更具实用价值[17]。虚拟磁链构建的过程中需要对整流器网侧输入电压进行积分处理,但使用纯积分环节会存在积分初值和直流偏置问题。为解决积分初值问题,传统方法采用一阶低通滤波器(low-pass filter,LPF)[18]替代纯积分环节。但该方法会造成磁链估计值幅值衰减和相位偏移,且直流分量抑制效果较差。文献[17]提出了初始磁链估算的方法,可以较为准确地观测虚拟磁链,并能够抑制电流过冲。文献[19]和文献[20]分别采用了一个二阶低通滤波器和3个串联的一阶低通滤波器来替代纯积分环节,均能应对传统方法所存在的问题。上述方法都是基于低通滤波器来设计的,对低频和直流分量的滤除效果受到一定的限制。文献[21]将一阶低通滤波器和一阶高通滤波器串联得到带通滤波器进行磁链估算,能够有效滤除输入侧直流分量并能解决积分初值问题,但该方法存在稳态误差需要另外加入补偿环节。此外,上述方法大多应用在三相整流器或单相PWM整流器上,而对单相级联H桥整流器的研究较少,有必要做进一步的研究。
针对上述问题,本文以单相级联H桥整流器(cascaded H-bridge rectifier,CHBR)为研究对象,提出一种基于虚拟磁链估计的改进型无网压传感器直接功率控制方法,可分为两部分,第一部分提出改进型虚拟磁链观测器,第二部分提出改进型直接功率控制。所提磁链观测器利用带通滤波器进行磁链估算,能有效抑制低频和直流分量,提高观测器精度且不需要额外的补偿环节。改进型直接功率控制方法取消坐标变换,不需要网压相位信息,简化控制结构并改善了系统动态性能。最后,通过实物实验平台,与已有方法进行对比,验证所提方法的优越性能。
1 基于CHBR的虚拟磁链观测器
1.1 CHBR模型描述
N模块的单相级联H桥整流器的电路拓扑如图1所示。图中,ug、ig、L、R分别代表网侧电压、网侧电流、网侧等效电感和电阻;uabi(i=1,2,…,N)、uab为第i个H桥模块的网侧输入电压和总网侧输入电压。Ti1~Ti4分别为第i个H桥的4个IGBT模块;udci、Cdi、RLi则分别代表第i个H桥模块的直流侧电压、支撑电容以及负载电阻。

图1 单相CHBR电路拓扑Fig.1 Topology of single-phase CHBR
首先,定义理想开关函数为:
(1)
(2)
定义如下的开关函数Si为
Si=Sia-Sib。
(3)
在整流器网侧列写基尔霍夫电压方程有
(4)
由CHBR的性质可得:
(5)
一般网侧等效电阻R很小,可忽略不计,将式(5)代入式(4)中得
(6)
与三相系统不同,单相CHBR网侧信号缺少一个自由度,因此无法直接获得网侧有功和无功功率。本文采用二阶广义积分[14](second-order generalized integrators,SOGI)的方法来构建ug和ig的有功和无功分量。经过SOGI,ug和ig在αβ坐标下各分量为:
(7)
(8)
式中:ugα、ugβ、igα、igβ分别为ug、ig的有功(α轴)分量和无功(β轴)分量;Ugm、Igm分别代表ug和ig的幅值;ω为网压基波角频率;φ为ug和ig之间的相位差。
1.2 虚拟磁链估算原理
借鉴交流电机的磁链估算方法,可将整流器网侧等效为虚拟电动机,网压ug即为虚拟磁链的微分值。对式(6)的两端同时积分可以得到虚拟磁链在αβ坐标系下的方程为[19]:
(9)
式中:ψα、ψβ代表虚拟网压磁链的α、β轴分量;uabα、uabβ为总网侧输入电压的α、β轴分量。
由式(9)可知,若要得到虚拟磁链,须对uab的α、β轴分量进行积分,这就意味着需要实时地获取uab的信息。最简单的方法就是在网侧输入端安装传感器,直接测得uab的值。但这无疑增加了硬件成本,并违背了少传感器控制的初衷。为此,本文采用混合逻辑动态(mixed logic dynamic,MLD)模型的方法来重构网侧输入电压uab。
由式(5)可知,Si和udci相乘得到uab,而udci可以通过电压传感器采样得到,所以求取开关函数Si是得到uab的关键。CHBR系统有着连续的电流、电压信号和离散的开关信号,是一个典型的混合系统。在整流器系统中,决定系统状态的是IGBT的开关状态和网侧电流方向。定义si1~si4为第i个H桥模块所对应4个开关管的逻辑状态值,1为导通,0为关断。考虑到所有的开关状态和网侧电流方向,将与之对应的开关函数列于表1。
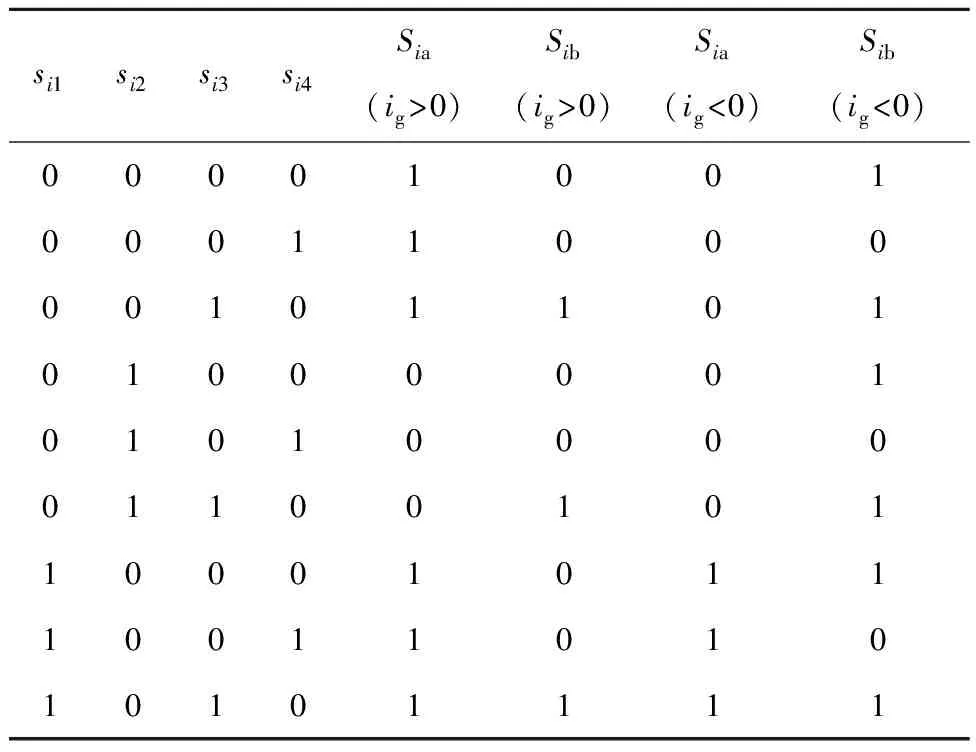
表1 不同条件下的开关函数Table 1 Switching functions under different conditions
定义如下辅助变量:
(10)
用卡诺图法推导表1数据可以得到开关函数Sia、Sib逻辑关系表达式[22]为:
(11)

由式(11)知,若能获得si2~si4的值,便能估算出uab。整流器各个IGBT的驱动信号一般由数字信号处理器(digital signal processor,DSP)的调制模块得来,可以通过读取相关寄存器获得各功率器件的驱动信号,继而得到各个功率器件的开关通断状态。传统的开关函数重构技术通常忽略了条件转换对建模的影响,而基于MLD模型的重构技术综合考虑了控制跃迁和条件跃迁,能够建立更精确的模型。
得到uab后,理论上需对其α、β轴分量积分以求取虚拟磁链,但纯积分运算需要考虑积分初值问题,否则会因引入直流偏置量而使估算磁链失准,甚至导致系统难以启动。为解决积分初值问题,较为常用的方法是采用一阶LPF来代替纯积分环节。在如图2所示的虚拟磁链观测器中,传统方法的传递函数为

图2 虚拟磁链观测器结构图Fig.2 Diagram of virtual flux observer
(12)
式中ω0为滤波器带宽。由文献[19]可知,传统虚拟磁链估算方法存在幅值衰减和相位偏移问题,会导致控制性能下降。
为解决单个一阶LPF所存在的问题,文献[20]采用3个LPF构建虚拟磁链,其传递函数为
(13)
式中:k1为阻尼系数;ω1为滤波器带宽。易知,G1(s)依然是一个低通滤波器。
1.3 改进的虚拟磁链观测器
文献[21]分析了各种滤波器的作用,得出了下面的结论:1)相较于纯积分器,低通滤波器可以解决积分初值问题及其带来的直流偏置;2)加入高通滤波器可以抑制输入测的直流分量。基于上述结论,本文提出一种改进型虚拟磁链观测器方法,该方法将低通滤波器和高通滤波器串联得到最后的滤波器。所提滤波器如下:
(14)
(15)
式中:k2为比例/阻尼系数;ω2为滤波器截止频率。通过式(14)所示的低通滤波器可以避免纯积分器积分初值带来的直流偏置问题;通过式(15)所示的高通滤波器能够抑制网侧输入电压中可能存在的直流分量[19]。在图2所示的结构下,所提改进型虚拟磁链观测器的传递函数G2(s)为
(16)
由式(16)可知,所提观测器传递函数的阶数为三阶,相较于传统一阶滤波器其阶数较高,离散化处理时会占用较多计算资源。但对于整个代码运行周期来说,多余的计算负担可以忽略。G2(s)的结构框图如图3所示。
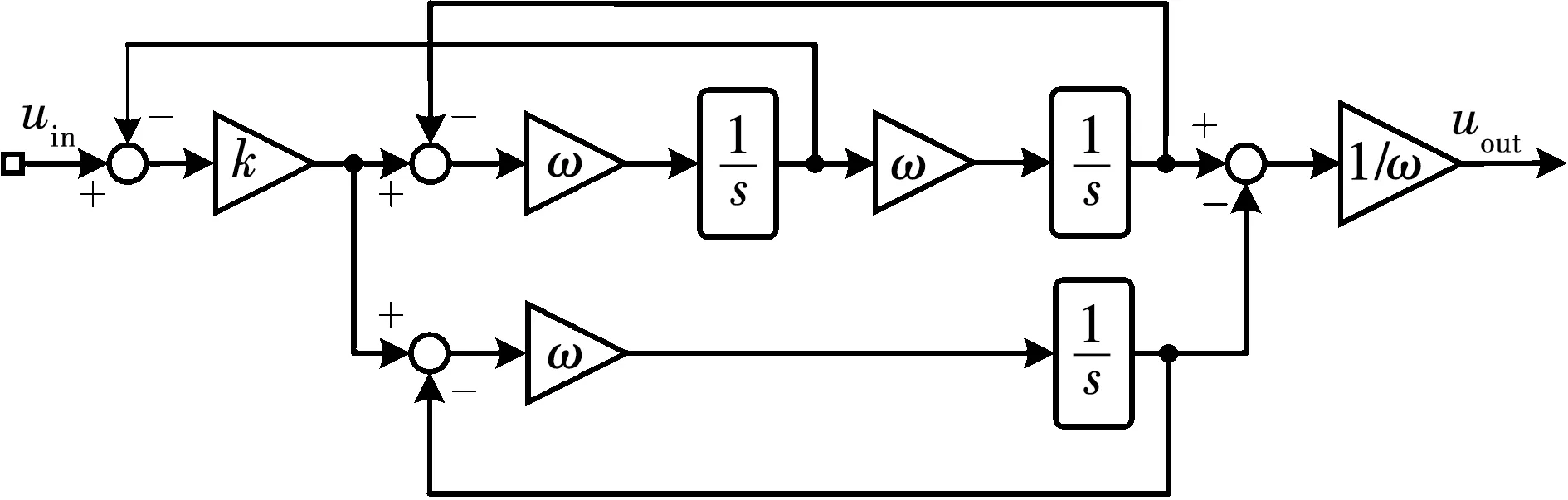
图3 G2(s)的结构框图Fig.3 Block diagram of G2(s)
若令截止频率ω2和网压角频率ω相等,将s=jω代入式(16)中,能够得到G2(s)在ω处的频率特性为
(17)
由式(17)可知,与传统低通滤波器相比,G2(s)在ω处并未有幅值衰减和相位偏置,能够实现纯积分环节的效果。
为证明观测器直流偏置抑制能力,可以假设G2(s)的输入信号为
uin(t)=U0+Umsin(ωt+φ0)。
(18)
式中:U0、Um分别代表输入信号的直流分量以及基波幅值;φ0为输入信号的初相位。uin(t)可以表达为
(19)
则uin(t)经过G2(s)后的输出信号uout(t)为
uout(t)=L-1[G2(s)uin(s)]=
(20)
由上式可知,uout(t)中不存在直流分量,所提方法能够有效地抑制直流偏置。此外,对比式(18)和式(20)也能发现G2(s)将输入信号的基波幅值衰减了1/ω,并使其相位滞后π/2,达到了积分器的效果。
图4给出了G2(s)的波特图,可以看出G2(s)是一个带通滤波器(band-pass filter,BPF)。在中心频率ω处,G2(s)拥有较高的幅值,而在中心频率两端,幅值衰减程度较大。因此相较于传统方法,该滤波器不仅可以滤除uab中的各次谐波,并且能够衰减直流分量和低频杂波。而已有的磁链观测器方法大都基于低通滤波器,显然这些方法不具备较好的低频滤波特性。在图4中,k2值越大,滤波器的幅值越大,因而滤波效果越差。
为进一步分析滤波器的动态及稳态特性,图5给出了不同k2值下的G2(s)零极点图。可见,所有极点都位于复平面的左半部分,系统稳定性能够得到保证。当k2从0.5逐渐增加到2的过程中,G2(s)的一对共轭极点逐渐远离虚轴并逐渐汇聚于实轴。这说明k2值越大,系统动态响应速度越快且稳定性越强。但当k2大于2后,所有极点均位于实轴上,一部分极点逐渐远离虚轴,另一部分逐渐靠近虚轴。这表明随着k2值的增大(k2>2),系统稳定性和动态速度都会变差。综上,选择k2值时需要综合考虑滤波效果、动态速度、稳定性,折衷处理这几方面的性能需求。本文取k2值为1.414。
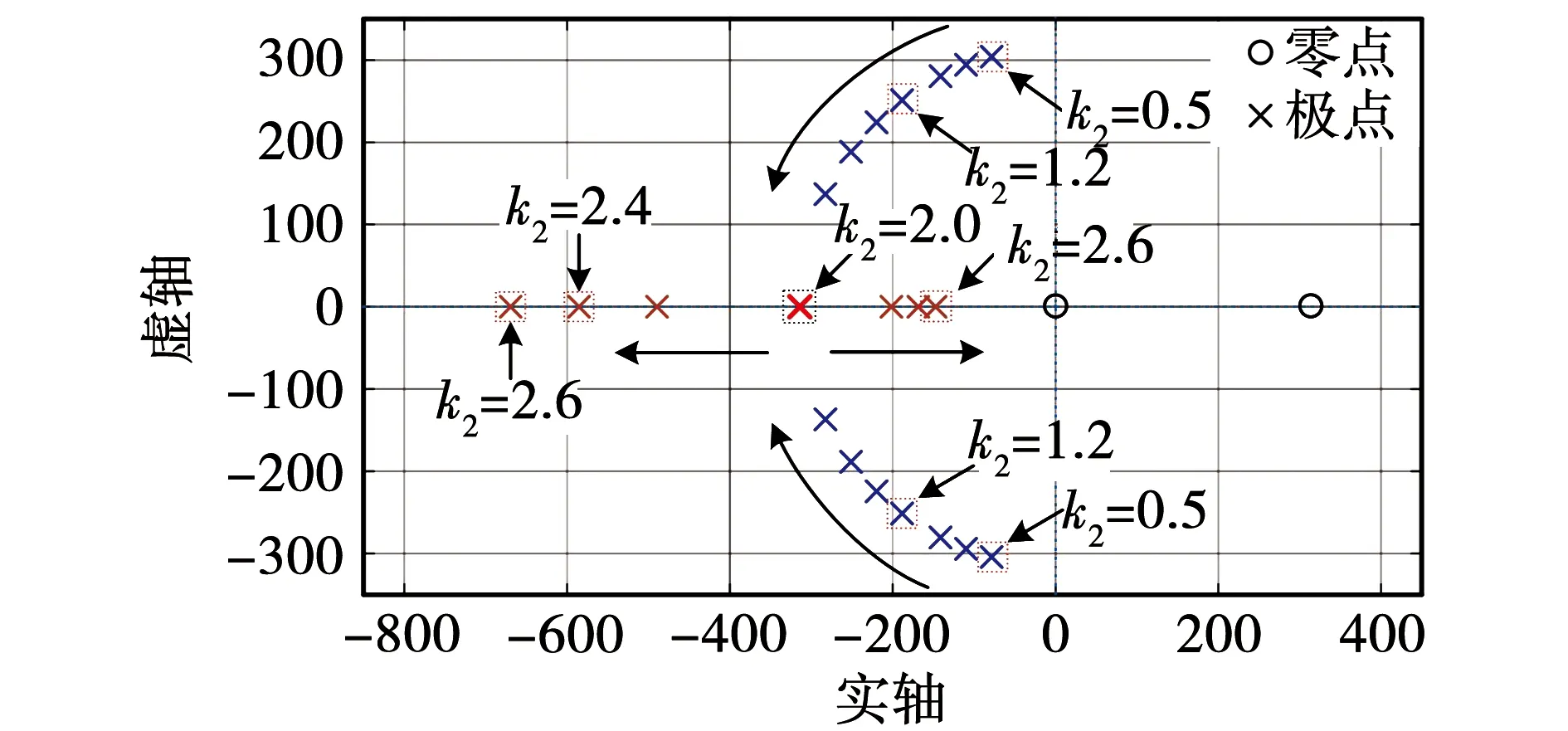
图5 G2(s)的零极点图Fig.5 Pole-zero maps of G2(s)
2 基于磁链观测器的直接功率控制
2.1 基于磁链估计的功率模型
通过矢量分析[20],网侧电压和虚拟磁链的关系可表示为:
(21)
利用估算出来的虚拟磁链和式(21)便能重构出网侧电压的α、β轴分量,继而达到无网压传感器的目的。此外,可以通过虚拟磁链估算出网压的幅值信息和相位信息如下:
(22)
(23)
由式(21)和文献[23]中的功率计算公式,得到基于磁链观测器的瞬时功率计算公式为:
(24)
忽略等效电阻R,基于PI控制器的传统功率前馈解耦DPC算法数学模型[13]为:
(25)
式中:uabd、uabq分别代表uab的d、q轴分量;KPp、KPi、KQp、KQi分别代表有功功率、无功功率PI控制器的比例系数和积分系数;P*、Q*分别表示有功功率和无功功率的给定值。
传统功率前馈DPC以P、Q为控制变量,以(-2ωLQ/Ugm+Ugm)、(-2ωLP/Ugm)为前馈变量,得到uab在旋转坐标系(dq坐标系)下的分量uabd、uabq,能够实现P和Q的解耦控制。然而,CHBR所需的调制信号uabα是静止坐标系(αβ坐标系)下的分量,若要获取调制信号,需要如下所示的αβ/dq旋转坐标逆变换:
(26)
2.2 单相级联H桥整流器改进型DPC算法
传统功率前馈DPC算法通过旋转坐标变换来获取调制信号,需要用到式(22)所示的网压相位信息。根据文献[13]中的改进型控制框架,提出一种基于PI控制器的CHBR改进型DPC算法。
定义改进型DPC算法的有功、无功控制器输出信号eP、eQ为:
(27)
式中uP、uQ分别为有功、无功电压调制信号。从式(27)中反解出uP、uQ为:
(28)
则整流器系统的调制信号uabα可以被表示为
(29)
基于PI的改进型DPC结构如图6所示。
图6中,有功功率给定值P*从电压外环处获得,无功功率参考值Q*设置为0。P*、Q*分别与P、Q做差,经过PI控制器调节后得到vP、vQ,并通过式(28)、式(29)求得调制信号uabα。改进型DPC相较于传统功率前馈DPC,取消了旋转坐标变换,不需要网压相位信息。在无网压传感器控制中,改进型DPC方法可以省略式(22)的计算过程,而在传统有网压传感器控制中,甚至可以省略锁相环模块。改进型DPC算法无疑可以减轻控制器计算负担。
2.3 控制系统总体描述
本文所提单相CHBR改进型无网压传感器DPC的总控制系统框图如图7所示。

3 实验验证
3.1 实验平台
为验证所提方法的可行性,在单相3模块级联H桥整流器小功率实验平台上进行对比验证。
实验平台如图8所示。实验平台的主电路由输入电源、网侧输入电感、3级联H桥模块构成。其中,3级联H桥模块由6个英飞凌IGBT功率模块(FF200R12KT4)组合而成。采用5 kW自耦变压器将市电变换至所需幅值交流电压作为电源输入。在系统启动阶段接入预充电电阻,防止启动冲击对电路造成损害。采用电流钳和若干差分探头分别测量ig、ug、udci、uab等值,并通过示波器显示波形。负载处接入2个波纹电阻和一个电子负载。可以通过改变电子负载的阻值来模拟负载不平衡工况。控制算法由32位浮点型数字信号处理器TMS320F28335实现。通过霍尔传感器和差分电路对电流、电压信号进采样,并输送给DSP内置ADC模块进行模数转换。DSP内部数字信号由16位数模转换芯片DAC8552进行转换,可通过示波器观察。CHBR实验系统参数如表2所示。

表2 CHBR实验系统参数Table 2 Experimental system parameters of CHBR
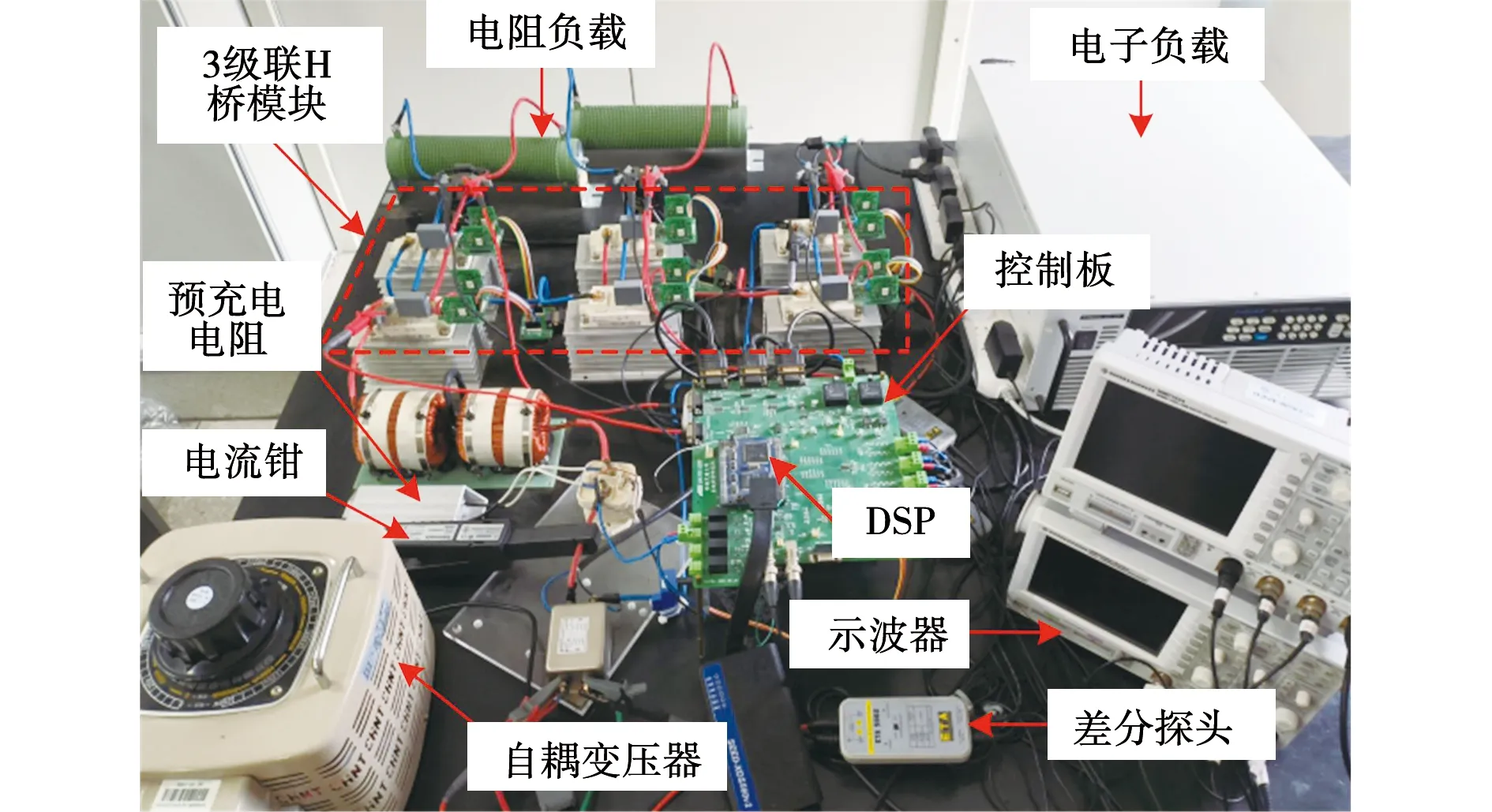
图8 单相3模块CHBR实验平台Fig.8 Single-phase 3-cells CHBR experimental platform
3.2 实验结果分析
本文从虚拟磁链观测器精度、稳态分析、谐波分析、动态分析、以及电压平衡等几个方面进行对比实验验证。
为验证所提虚拟磁链观测器的精确程度,图9给出了不同磁链观测器方法下的网压估算信号。图9中ug为直接通过差分探头测量的网压信号;uge和ugs分别为网压估算值(α轴分量)和网压采样值,二者均由DAC8552转换而来。由图9可知,3种方法的相位超前角度Δφ分别为15.5°、6.2°、0,3种方法估算出来的网侧电压衰减值Δu分别为7.4、3.6和0 V。实验结果表明:基于一阶LPF估算出来的网压信号uge相较于采样信号ugs有明显的相位超前、幅值衰减现象,这印证了前文的分析结果。基于三阶LPF的方法存在较小的相位超前和幅值衰减现象。而所提磁链观测器能够无误差地估算出网侧电压,相较于其他方法具有较高的观测精度,并且不存在直流偏置问题。

图9 不同磁链观测器方法下的网压估算信号Fig.9 Grid voltage estimation signal with different flux observer methods
为进一步研究所提方法的有效性,进行了控制变量对比实验。首先,确保内环控制方法不变,比较不同磁链观测器性能。图10给出了在改进型DPC算法下,采用不同磁链观测器的稳态实验波形。两种磁链观测器方法都能实现网侧电流正弦化、输入电压七电平、直流侧电压维持恒定等整流器基本控制目标。由于uab中参杂直流偏置、观测器失准以及相位估算误差等原因,网侧电流中也会包含直流分量。从图10(a)中可知,三阶LPF方法网侧电流的负半轴幅值要大于正半轴幅值,这说明网侧电流ig中含有一定的直流分量。而所提观测器方法网侧电流的正负半周幅值基本上相同,表明ig中包含的直流分量较少。
图11给出了2种磁链观测器方法下网侧电流ig的快速傅里叶变换(fast Fourier transform,FFT)结果。由图11(a)可知,基于三阶LPF方法网侧电流总谐波失真值(total harmonic distortion,THD)为3.13%,且直流分量对于基波分量的比值约为6.64%。由图11(b)可知,所提观测器方法网侧电流THD值为2.37%,直流分量对于基波分量的比值大约为2.129%。两图中低次谐波占有较大比例,高次谐波主要分布于2N倍开关频率(12 kHz)附近,并且从FFT分析结果可知所提方法各次谐波含量少于三阶LPF方法。实验结果表明:所提方法能够更好地抑制网侧电流中的直流分量和其他各次谐波。

图11 不同磁链观测器方法下的网侧电流FFT分析结果Fig.11 FFT analysis results of grid current with different flux observer methods
其次,控制磁链观测器方法不变,比较不同DPC方法的动态性能。图12给出了在改进型磁链观测器方法下,两种DPC策略的P、P*、ig实验波形。令有功功率参考值P*从385 W突变到450 W,功率前馈DPC方法有功功率P需要约18 ms恢复到稳态,而改进型DPC方法有功功率调节时间约为9 ms,并且前者的超调量要大于后者。实验结果表明:所提改进型DPC算法具有更快的动态响应速度、更小的超调量,即更优的动态性能。此外,测试了两种算法的计算复杂度。功率前馈算法的程序运行时间约为2.42 μs。但该算法需要获取如式(22)所示的相位信息,获取相位信息所需要的时间约为1.25 μs,因此功率前馈算法最终所需的运行时间为3.67 μs。改进型DPC算法的运行时间约为2.20 μs。实验结果证明改进型DPC算法在算法复杂度上略优于传统DPC算法。
最后检验了负载不平衡工况下所提算法的可行性。图13给出了RL3从20 Ω突变到30 Ω情况下,各模块直流侧电压udc1、udc2、udc3和网压估算信号uge的动态波形图。由图13可知,3个直流侧电压在负载突变后出现不平衡现象,但经过一段调节时间后又能恢复到平衡状态,并且在此过程中网压估算信号幅值几乎没有波动,仍是较为连续的正弦波。实验结果表明:电压平衡控制算法有效,且所提网压估算方法基本不受负载突变的影响。
4 结 论
本文以单相级联H桥整流器为研究对象,提出了一种改进型无网压传感器直接功率控制。首先,给出了一种改进型虚拟磁链观测器方法来估算磁链在静态坐标系下的基波分量,继而估算出网压信号的各个分量以实现无网压传感器的目的。其次,为降低控制结构复杂度、改善系统动态性能,给出了一种改进型的直接功率控制方法。最后,通过3模块CHBR实物平台进行验证,可得如下结论:
1)传统基于低通滤波器的虚拟磁链观测器方法由于相位超前、幅值衰减等问题会存在一定的观测误差,而本文所提观测器方法具有更高的观测精度,能够无误差地估算网侧电压信号。
2)对比基于三阶LPF的虚拟磁链观测器方法,所提观测器方法能够更有效地抑制网侧电流中各次谐波和直流分量。
3)所提观测器方法估算出的网侧电压信号不受负载突变影响。
4)相较于传统直接功率控制,改进型直接功率控制取消了坐标变换和锁相环,具备更低的结构复杂度和更快的动态速度。
