基于Gabor滤波与分水岭算法的锂电池极片缺陷检测方法
2023-11-01周文一李林升陶怡帆毛伟生
周文一, 李林升, 陶怡帆, 毛伟生
(上海电机学院 电气学院,上海 201306,E-mail: 492171611@qq.com)
锂电池制造过程工序繁多,对设备精度要求较高。锂电池极片是锂电池的重要组成部分,加工过程中振动或受外力不均匀时均容易造成极片缺陷,缺陷会对锂电池的性能造成严重的影响。为提高锂电池极片缺陷检测效率,很多学者探索锂电池缺陷自动化检测方法。黄梦涛等[1]针对传统Canny算子的缺点,提出了一种改进的Canny算子的锂电池极片缺陷检测方法。陈功等[2]采用最大熵阈值实现图像分割并用高斯模型实现缺陷目标的分类。胡玥红等[3]使用中值滤波器和Sobel算子结合的方法对锂电池极耳检测。上述方法对图像背景存在大量杂波的缺陷适用性较弱,而Gabor滤波器能够实现有背景杂波的缺陷检测。史漫丽等[4]通过构造Gabor核函数来自适应构建Gabor滤波器实现对红外弱小目标检测。屈尔庆等[5]对传统Gabor滤波器进行复合差分进化,提高了Gabor滤波器的效率。而锂电池极片图像背景与缺陷灰度差异较小,背景噪声较多,上述方法对锂电池极片缺陷检测适用性不强。
为了提高锂电池极片缺陷检测的准确性,本文提出一种基于自适应Gabor滤波器和分水岭分割算法融合的检测方法。该方法首先增加调整参数,并根据图像灰度值比例,自适应调整Gabor滤波器参数,得到滤除背景的缺陷,然后使用分水岭算法[6]实现缺陷的边缘提取,最终实现锂电池极片的缺陷检测。
1 检测流程
本文检测方法流程如图1所示。主要步骤为图像预处理,便于后续检测;传统Gabor滤波器改进的自适应Gabor滤波器;分水岭边缘检测算法提取缺陷轮廓;缺陷框定,输出检测结果。

图1 算法流程图
2 图像预处理
在锂电池的缺陷检测工作中,使用CCD相机对极片表面进行图像采集。采集后的原图像缺陷大小不一,采用截图,缩放等操作,统一处理为300×300大小的图像。然后再进行图像灰度化,便于后续的Gabor滤波。预处理前的图像如图2(a)所示,预处理后的图像如图2(b)所示。

图2 预处理前后图像
3 图像Gabor滤波
3.1 Gabor变换与Gabor函数
为了消除缺陷图中存在的噪声干扰,对图像进行Gabor滤波。
Gabor函数的基本形式[7]如(1)所示:

(1)
其中:ga(t)为窗函数。
对于图像处理,使用二维的Gabor滤波器,即一个正弦函数与高斯函数作为窗函数进行叠加,可以得到二维Gabor函数的表达式[7]如(2)所示:

(2)
其中:x′=xcosθ+ysinθ,y′=-xsinθ+ycosθ;参数λ表示滤波的波长;θ表示Gabor核函数图像的倾斜角度;ψ表示相位偏移量,方差σ取值范围是-180°~180°,表示高斯函数的标准差;γ表示长宽比,决定这Gabor核函数图像的椭圆率,通常取0.5。传统的Gabor滤波采用固定权值的方式,通过设定上述参数进行滤波,提取图像特征。
3.2 Gabor滤波器的改进
Gabor滤波器共有5个参数可以调整,传统Gabor滤波通常使用多个Gabor滤波器形成多通道Gabor滤波器提取多尺度多方向下的特征提取。基于Gabor小波和SVM的人脸算法识别研究[8]中使用了5个尺度,8个方向的Gabor滤波器;基于Gabor滤波的虹膜多特征提取及融合识别方法研究[9]中使用了5个尺度,8个方向的Gabor滤波器;形状标记图Gabor小波的交通标志识别[10]中使用了6个尺度,6个方向的Gabor滤波器。


图3 传统Gabor滤波后的图像
由图3可知,传统Gabor滤波方法并不能有效得到缺陷状态特征,且相差π方向的特征图存在重复。



图4 改进的Gabor滤波生成的部分图像
3.3 Gabor滤波器的自适应
由图4可知,改进后的Gabor滤波器能够得到缺陷特征图,但仍存在缺陷边缘缺失,背景存在噪音且使用改进后的滤波器对白色缺陷进行滤波效果不理想等问题。
为了解决上述问题,本文从以下三个方面实现Gabor滤波器自适应。
首先,理想滤波后的图片的具有以下特征:除了缺陷部分外大部分为白色的背景,且没有噪音,较符合人眼的直观缺陷观测。通过实验可知,调整参数σ能够在细节上控制缺陷的边缘,微调噪声对图片的影响。因此,选取σ为0.8、0.9、1.0、1.1、1.2,用于生成图片后的细节调整,抑制噪声。
其次,由于需要调整四个不同的参数,生成的图片数量为240张,人为选择理想的图片较为耗时。根据理想图片的特征,需要找到缺陷为黑色或灰色,背景为白色的图片。通过实验可知,最大的缺陷面积约占整个图片的10%。为了粗略筛选出白色背景的图片,因此,设置阈值为85%,即图片中白色像素(灰度值255)比例达到阈值以上,则认定为白色背景图片。再按照黑灰色像素(灰度值0到254)值比例排序白色背景图片,比例最大的即为理想图片。
最后,针对白色缺陷的滤波效果不理想的问题,对白色缺陷的图片进行反相。观察图片背景可知,背景噪声较多,大部分像素灰度值较低。因此,计算灰度值较高的像素比例,合理设置阈值,即可判定图片缺陷颜色。
为了确定灰度值阈值大小,使用不包含缺陷的图像直方图大致判定噪声灰度值范围。实验表明,背景灰度值范围在40至80之间。那么黑色和白色缺陷,可以看作一个简单的分类问题。采用统计阈值到最大灰度值(255)的像素点所占比例判断黑白缺陷。公式如下:
(3)
其中:P表示所占比例,k表示设定的阈值,L表示图片的长,W表示图片的宽。
为了提高黑白缺陷分类的鲁棒性,实验以80为基准,选取80,100和120分别作为阈值,计算了部分图片中高于阈值像素点所占比例,得到表1。

表1 选取不同阈值P的值/%
通过表格,可以观察到,当阈值为80时,图片1白色缺陷比例为0.977%,图片7黑色缺陷比例为0.688%;当阈值为120时,图6中白色缺陷比例接近0。因此,选取阈值100,P取0.000 1作为临界值,使用决策树[15]方法,对不同缺陷的图片进行分类。实验表明,能够很好的区分数据集中的黑色与白色缺陷。
通过上述改进,Gabor滤波器在本文数据集上实现了自适应,自适应Gabor滤波器最终输出图如图5所示。

图5 自适应Gabor滤波最终输出图像
为验证本文算法的有效性。将本文方法分别与高斯滤波[16]、双边滤波[17]做比较。从图中可以看出,高斯滤波对图片背景中的噪声滤波效果较弱。而双边滤波与自适应的Gabor滤波能够过滤背景噪声。高斯滤波的卷积核取3;双边滤波模板取7。采用改进Canny算子中一致的高斯滤波与双边滤波参数。实验结果如图6所示,通过对比可以看出,高斯滤波处理后的结果仍然存在噪声干扰。双边滤波与自适应Gabor滤波可以较好的滤除背景噪声,但双边滤波相比Gabor滤波对黑斑缺陷与条痕缺陷会丢失一些边缘细节,如图6(c3)、(d3)、(c4)、(d4)放大后的图7所示。自适应的Gabor滤波既能够较好的平滑图像,又可以凸显缺陷目标。

图6 图像滤波结果

图7 图像放大后的边缘细节对比
4 缺陷边缘检测算法
4.1 阈值二值化
对于Gabor滤波后的图像,部分缺陷与背景对比度较低,因此需要对图像进行阈值二值化[18],从而突出缺陷区域,便于后续的分水岭算法分割。
阈值分割采用大津法(OTSU)[19],大津法能够对Gabor滤波后的图像进行快速阈值二值化,二值化后的图像如图8所示。

图8 阈值二值化后的图像
4.2 分水岭边缘检测算法
分水岭边缘检测算法[20-21],其思想来源于地质学,使图像的不同灰度级的像素对应不同的高度,简单理解为将图像升维,灰度值大的像素点高。由此构成图像中不同高度的山峰和山谷。Gabor滤波后的最终输出图像的三维图,如图9所示。

图9 Gabor滤波后的三维图
分水岭算法基本思想是从山谷最低处(灰度值最低)对整个山脉注水,在这之中产生了许多盆地,当水平面不断升高,盆地的边界则为分水岭,也就是图像的边界。
分水岭算法的思想简单,有计算速度较快,定位精准,轮廓线封闭性好的优点,同时对微弱边缘也有良好的响应。分水岭分割后的图像如图10所示。

图10 分水岭边缘检测图
为了验证本文方法的有效性。通过对比区域生长算法[22],改进的Canny算子一文中的方法,对缺陷进行边缘检测。区域生长算法使用双边滤波后的图像,选取图像中坐标(1,1)为种子点进行区域生长,再通过图像反相处理后得到如图11(b1)、(b2)、(b3)、(b4)、(b5)所示的缺陷轮廓图。在基于改进 Canny 算子的锂电池极片表面缺陷检测一文中,原作者在使用双边滤波对锂电池极片图像进行降噪后,使用多尺度细节增强算法增强图像;其次使用Sobel算子[23]的3×3梯度模板计算图像梯度的方向与幅值;最后,通过逻辑与运算对最大熵算法与大津法分割后的结果进行边缘融合,使用闭运算和细化操作得到检测边缘。得到的缺陷轮廓图如图11(c1)、(c2)、(c3)、(c4)、(c5)所示。

图11 缺陷检测结果
由图11可知,区域生长算法可以检测出双边滤波后的图像中的缺陷,缺陷边缘清晰,但是对于部分缺陷,仍存在少量干扰,如图11(b1)、(b3)所示。改进的Canny算子能够检测出大部分缺陷边缘,但是双边滤波后的部分图片存在干扰与缺陷边界模糊的问题,因此改进的Canny算子对部分缺陷的检测结果并不理想。图11(c3)中,并不能检测出完整边缘,且缺陷边界定位不准确。由于人眼对灰度变化不敏感,将图6(c5)的直方图[24]12(a)放大得到图12(b),图12(b)中可见存在少量像素值值大于200的点,这使得双边滤波后图像存在干扰,图11(c5)与图11(b5) 存在相同位置的干扰点也同时说明了这一点。

图12 图6(c5)的直方图及直方图局部细节放大
本文提出的算法能够对缺陷较为精准的检测,且平滑噪声能力较强。从图11(d4)条痕缺陷的检测结果可知,本文方法可以能够保留更多的细节。从图11(d5)中白斑缺陷的检测结果可以看出,本文提出的方法在保留细节的同时抗干扰能力较强。实验结果表明,本文提出的方法对缺陷定位准确,且能够检测多种缺陷。
4.3 缺陷轮廓框提取
使用分水岭分割算法后,可以观察到图10中可以获得完整,清晰的缺陷边缘。遍历缺陷边缘的坐标,再通过最小外接矩形法,最终检测出的缺陷效果如图13所示。
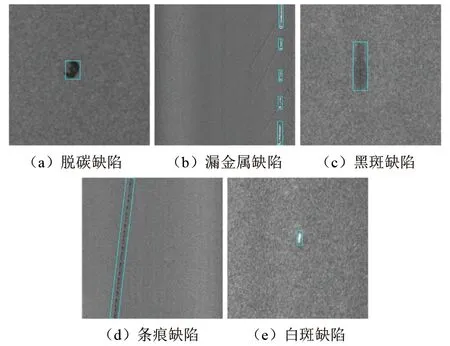
图13 实际检测效果图
5 结论
针对锂电池极片缺陷难以检测的问题,本文提出了一种新的锂电池极片缺陷检测方法。通过改进传统Gabor滤波器参数,判断图片灰度值所占比例,简单实现了Gabor滤波器的自适应,可以有效实现滤波,提取出缺陷区域。然后通过阈值分割实现二值化,对缺陷区域实现增强,再通过分水岭算法对图像分割,实现对缺陷边缘的提取。通过对比,本文算法抗干扰能力较强,能够有效对锂电池极片的脱碳,漏金属,黑斑,条痕和白斑等缺陷实现检测。
