转向系统主动容错多输入多输出模型自适应控制
2023-11-01王其松罗春雷唐云祥李爱花
王其松, 罗春雷, 唐云祥 , 靖 文 , 李爱花
(1.盐城工业职业技术学院 汽车与交通学院,江苏 盐城 224005,E-mail: ronglutuan764@163.com 2.中南大学 机电工程学院,长沙 410083;3.南京钢铁集团有限公司,南京 210035)
为了达到自动驾驶目标,需要设计合适的线控转向系统,当传统汽车发生转向系统的失效问题时,汽车只能进入减速状态并最终完成停车,不能对轨迹进行精确跟踪,甚至还会造成交通事故[1-3]。由此可见,如何调节转向系统故障容错能力已经成为一项关键措施。在分布结构电驱动汽车系统中可以设置多个电机形成横摆力作用再对转向系统横向偏差进行补偿,由此确保转向系统失效的情况下也可以保持设定轨迹路线行使,实现驾驶安全性能的大幅提升[4-5]。
容错调控方法最初是在航空航、精密医学系统、光学检测等行业得到应用[6]。随着人们对汽车安全性持续提高,在汽车控制领域也开始引入容错控制技术[7]。目前较为成熟的容错技术主要包括线性二次调节、滑模处理、分配算法、机器深度学习等[8-9]。此外还有许多学者开展了分布电驱动汽车容错调节方面的研究工作,但以上研究内容基本都是关于驱动系统容错调节与转向电机故障分析的过程[10]。还有一些研究人员根据Delta算子处理技术对线控转向系统进行故障判断并建立了容错模型预测方法(MPC)。通过三角算子建立故障检测观测器,之后评估线控转向系统故障特征。根据Delta算子构建主动容错MPC,以此补偿执行器运行故障产生的干扰,可以在执行器出现故障问题时实现汽车转向控制,避免发生跟踪能力减弱的情况[11]。转向系统冗余技术也在容错控制系统中获得了应用,但上述方法存在成本偏高的情况,并且实际布置结构也较为复杂[12]。H∞控制方式也可以在线控转向系统中实现容错调节,但采用这一方法进行处理时需建立准确模型函数[13]。采用无模型自适应方法进行处理时是通过动态线性方法与伪偏导数算法为闭环系统动态参数设置等价动态线性模型,之后根据上述等价虚拟模型建立控制器,再对控制系统开展理论研究[14],只通过被控对象入输出参数完成非线性系统的自主调节。根据近些年文献报道可知,无模型自适应控制技术在众多领域都发挥了重要作用[15]。
到目前为止,汽车线控转向容错控制过程通常都需要建立准确的汽车模型并设置相应的故障诊断和隔离方式,从而确保系统可以克服汽车模型时变、强耦合问题。根据以上研究结果,本文开发了一种包含多输入多输出参数的无模型自适应主动容错控制(MIMO-MFAC)技术,从而保证安全行驶控制性能。
1 MIMO-MFAC容错控制器设计
本文建立了图1中转向系统主动容错架构[16]。可以使电动汽车系统存在故障问题的情况下,利用四轮电机形成横摆力矩,使汽车与设计轨迹之间保持紧密跟踪状态,在系统框架中包含预期驾驶模型、MIMO-MFAC容错调节器与控制对象。
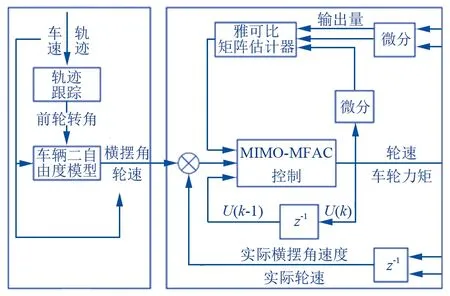
图1 MIMO-MFAC转向系统主动容错控制图
对于MIMO-MFAC容错控制过程来说,不需要设置精确数学模型,但需为系统设定输入输出参数。因此设计得到图2中电动汽车模型,分别对纵向、横向与横摆运动进行自由度测试,建立以下动力学方程:

图2 电动汽车自由度模型
式中:m表示整车质量;vx表示汽车沿纵向的车速;vy表示汽车侧向车速;ω表示横摆角速度;a、b依次是前轴和后轴相对质心的间距,c表示1/2轮距。
以下是汽车转向系模型表达式:
式中:Js表示转动惯量;fs表示摩擦系数;dw表示轮胎与地面间形成的接触面宽度;fδ表示前轮转角;Ts是方向盘转矩。
完成汽车的非线性化和离散化处理获得以下的MIMO汽车非线性离散时间:
y(k+1)=f[y(k)…y(k-ny),u(k)…u(k-nu)]
式中:u(k),y(k)依次对应k时刻下MIMO-MFAC输入与输出。
构建电动汽车转向MIMO-MFAC容错表达式,如下所示:
式中:η∈(0, 2]属于步长因子,确定冗余容错步长;μ>0表示权重因子,可以对伪雅克比矩阵估计结果进行惩罚计算。
MIMO-MFAC主动容错系统校正电动汽车线控转向系统故障时,先结合汽车输入输出参数估算得到k时刻伪雅可比矩阵,以两侧车轮力矩T作为输入,以车轮角速度ω和横摆角速度ωk作为输出;再计算k时刻实际值和期望值之差,由此确定车轮角速度误差。
2 仿真验证
对MIMO-MFAC线控转向系统主动容错控制过程开展Matlab/Simulink和CarSim仿真测试,以CarSim的SUV车型作为测试对象,具体汽车参数见表1。

表1 汽车动力学参数
当系统无法实现转向控制的情况下,MIMO-MFAC主动容错控制系统可以利用图3中分布式结构为电驱动汽车车轮设置分配力矩,确保汽车达到图4的期望车速并保持图5期望横摆角速度,实现汽车的安全控制效果。对于上述仿真工况,当汽车无法实现转向控制,得到图6中有无容错系统控制条件下的两种行驶轨迹。通过分析可以发现,当汽车保持72 km/h的车速状态下时,持续15 s丧失转向控制并且无法实现控制的条件下,汽车将会偏离车道并撞到附近汽车或围栏而导致交通事故。但加入本文容错调节系统时,可以利用冗余容错算法使汽车始终位于期望轨迹上,到达t=35 s时进入减速制动阶段,汽车完成制动停车,同时开启双闪灯提示附近交通参与人员该汽车存在故障,从而确保汽车和其它汽车的安全性,上述测试结果表明本文开发的容错系统可以确保汽车在高速工况下不具备转向控制能力时也可以完成汽车调控,从而有效保障汽车运行安全,实习容错控制效果。
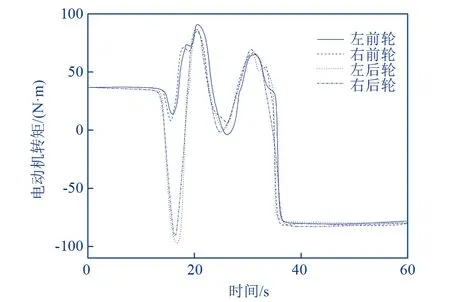
图3 电机转矩分配(中高速丧失转向)
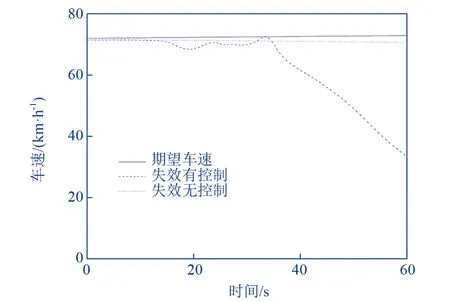
图4 汽车速度(中高速丧失转向)
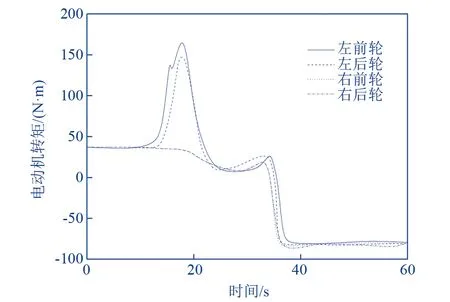
图5 电机转矩分配(中高速丧失转向)

图6 汽车速度(中高速丧失转向)
3 试验验证
为了进一步分析主动容错控制过程实时性,还设置了典型工况下的驾驶模拟器测试,表明此方法满足可靠性要求。按照跟仿真过程同样的中高速丧失转向能力开展测试。根据CarSim汽车动力学模块和建立在Matlab/Simulink基础上的容错控制器以S函数完成信息的传输过程。把容错模型语句编译后加载到平台系统中,之后利用视景仿真方式建立汽车运行场景,同时在CarSim电脑中建立输入输出接口再进行测试。为中央控制平系统的各个电脑确定相同通讯步长,控制周期为10 ms。
进行主动容错控制时,针对图5中四个车轮力矩实施调节,从而控制汽车达到图6的期望车速与图7的横摆角速度,确保汽车失去转向能力的情况下也可以保持预期路径并完成安全换道的过程。

图7 横摆角速度(中高速丧失转向)
通过对比发现,测试结果和仿真结果相符,由此表明本文开发的主动容错控制系统可以使汽车线控转向系统在不具备转向控制性能的条件下也实现图8的期望轨迹。

图8 汽车行驶轨迹(中高速丧失转向)
表2给出了上述工况下进行仿真测试和驾驶模拟器测试得到的横摆角最大速度差值和横向位置差值。根据表3仿真验证结果可知,横摆角速度达到了0.000 4 rad/s的最大差值,并产生了0.110 2 m的最大横向偏差;在驾驶模拟器中进行测试时横摆角速度达到了0.003 8 rad/s的最大差值,同时沿横向位置形成了0.263 5 m的最大差值,从而确保转向系统出现故障的情况下也可以控制汽车被控制在安全区间内。

表3 工况控制效果对比
4 结论
本文开展转向系统主动容错多输入多输出模型自适应控制研究,取得如下有益结果:
(1) 仿真结果表明容错系统可以确保汽车在高速工况下不具备转向控制能力时也可以完成汽车调控。设置容错系统可以使汽车横摆角速度差值低于0.000 5 rad/s,汽车横向位置差值低于0.110 5 m,确保汽车处于10 cm的安全区间内。
(2) 测试结果和仿真结果相符,表明本主动容错控制系统可以使汽车线控转向系统。横摆角速度达到了0.000 4 rad/s的最大差值,并产生了0.110 2 m的最大横向偏差,确保转向系统出现故障的情况下也可以控制汽车被控制在安全区间内。
