基于改进型RISE-MC-LADRC的逆变器电压控制
2023-11-01邱超颖余溢威刘铸辉
邱超颖,黄 媛,余溢威,刘铸辉
(湖南科技大学信息与电气工程学院,湘潭 411201)
随着经济和社会的快速发展,人类对能源需求的日益增长,以及传统能源的日趋紧缺,越来越多的学者开始关注分布式发电技术[1]。逆变器作为连接分布式能源发电系统与各种负载之间的枢纽,其控制性能的优劣决定了系统输出电能的质量[2]。因此,如何提高逆变器的性能成为当前研究的热点。跟踪精度、响应速度及抗扰能力是衡量逆变系统控制性能的重要指标,同时,实际逆变系统中存在负载突变和非线性负载等强扰动,这些强扰动的存在会影响逆变系统输出电能的质量[3]。传统模型补偿线性自抗扰控制MC-LADRC(model compensated linear active disturbance rejection control)的抗扰性能无法满足控制要求,因此,研究设计抗扰性能强的控制方法具有重要意义和应用价值。
为了提高逆变系统的扰动抑制性能,有学者提出自适应控制[4-5]、滑模控制[6-8]和重复控制[9-11]等方法。自适应控制对含有参数不确定性的系统具有很好的控制效果,但系统中出现强扰动时,其抗扰能力明显不足;滑模控制具有快速响应、对参数摄动及外界扰动不灵敏等优点,但在实际控制系统中,由于存在惯性和时延等因素,使滑模控制不可避免地存在高频抖振;重复控制能对周期性信号进行无静差跟踪,但无法抑制非周期扰动。上述方法均因各自的局限性而不利于工程的实际应用[12]。文献[13-15]提出自抗扰控制ADRC(active disturbance rejection control),其主要思想是将作用于系统的所有不确定因素均视为总扰动,采用扩张状态观测器ESO(extended state observer)对总扰动进行实时观测,并利用反馈机制对其进行补偿,从而将系统还原为积分器串联型。ADRC不依赖于准确的系统模型,具有跟踪精度高和抗扰能力强等优点[16]。但非线性ADRC 的参数不易整定,且扰动过大时,系统的性能会急剧恶化[17]。为简化参数整定和便于理论分析,文献[18]提出一种更易于工程实现的线性自抗扰控制LADRC(linear active disturbance rejection control),将ESO 和误差反馈控制律线性化处理,使参数调整问题转化为双带宽选择问题,方法简单、易于调试。线性扩张状态观测器LESO(linear extended state observer)是LADRC 的核心,它起到实时估计各状态变量和总扰动的作用,因此,系统能否对总扰动进行有效补偿取决于LESO的观测精度。为了获得更高的观测精度,观测器带宽ωo的取值应尽可能的大[19],然而,过大的观测器带宽可能会导致观测过程中出现峰化现象[20]。因此,当系统存在负载突变和非线性负载等扰动时,仅增大观测器带宽不足以改善控制性能。目前,已有文献从抗扰性能的角度出发,对LADRC进行探究,文献[21]提出一种改进型LESO,有助于减小LESO 的观测误差和加快系统的收敛速度,但其改进型三阶LESO 引入了误差的二阶微分,可能会放大存在于系统内部的高频噪声,从而影响系统的稳定性;文献[22]提出微分前馈的MC-LADRC,虽能有效地消除建模误差,提高逆变系统的稳态性能,但引入微分前馈会放大高次谐波,导致输出电能质量的降低;文献[23]通过引入超前滞后校正环节,改善了逆变系统的控制性能,但增加了参数设计的复杂度;文献[24]采用误差符号鲁棒积分RISE(robust integral of the sign of the error)替代线性状态误差反馈律LSEF(linear state error feedback),构造出新型基于误差符号鲁棒积分的线性自抗扰控制RISELADRC(robust integral of the sign of the error-linear active disturbance rejection control),有效抑制了系统中的扰动,但相较于传统LADRC,其跟踪精度没有明显提高。
综上所述,本文针对逆变系统存在负载突变和非线性负载等强扰动的情况,提出一种改进型基于误差符号鲁棒积分的模型补偿线性自抗扰控制RISE-MC-LADRC(robust integral of the sign of the error-model compensated-linear active disturbance rejection control)电压控制策略。针对传统MC-LADRC抗扰能力不足的问题,采用抗扰能力更强的RISE控制律来代替传统LADRC 中的LSEF,有效抑制强扰动对逆变系统的影响;针对基于RISE-MCLADRC的逆变系统存在的跟踪精度低、响应速度慢的问题,将各状态变量与其估计值之间的误差作为调节各估计值导数的依据,利用电容电流测量值间接表示输出电压微分,并在总扰动通道加入一阶惯性环节,从而抑制系统内部的高频噪声,提高系统的控制性能。
1 单相全桥逆变器建模及MC-LADRC 控制器设计
1.1 单相全桥逆变器建模
单相全桥逆变器主电路拓扑如图1所示。其中,Ed为直流母线电压;Qi为第i个开关管,i=1、2、3、4;C为滤波电容;L为滤波电感;rL为滤波电感的寄生电阻;Z0为负载;虚线框内为非线性整流负载,由LZ、CZ、RZ和二极管构成。
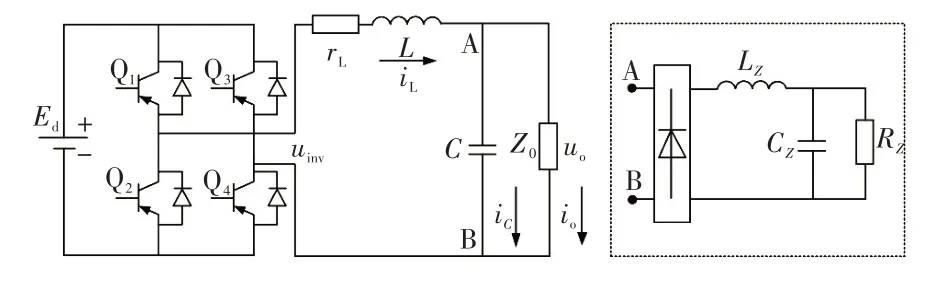
图1 单相全桥逆变器主电路拓扑Fig.1 Main circuit topology of single-phase full-bridge inverter
对电路状态方程进行Laplace 变换可得逆变器系统输出电压与频域s的关系为
式中:uo(s)为逆变器系统输出电压;uinv(s)为桥臂侧输出电压;io(s)为负载电流。
根据状态空间平均法[25],推导出输出端uo(s)和调制端uinv(s)之间的频域传递函数GP(s)为
1.2 基于MC-LADRC 的电压控制
增加模型的已知信息之后,被控对象的不确定因素减少,LESO 的负担降低,在不降低LESO 带宽的情况下,能够更加精确地估计扰动,从而改善系统的控制效果[26]。
由式(2)可得
考虑在实际运行中,逆变器系统会存在开关管压降、死区时间、系统建模误差等内部扰动,以及负载波动等外部扰动,可得
式中:x1、x2、x3为系统的状态变量,x1为逆变器系统输出电压,x2为输出电压的微分,x3=f为作用于系统的总扰动;xp为状态变量矩阵。
由式(3)~(5)建立逆变系统扩张状态方程为
由式(6)建立LESO为
矩阵(Ap-LcCp)的特征值直接影响LESO 的误差衰减速率。根据极点配置理论[18]可得
式中,ωo为观测器带宽。

设计前馈控制为
由式(6)及式(9)可得
式中:为输出电压的二阶微分;为逆变器输出电压的观测误差,为输出电压微分的观测误差,为总扰动的观测误差,。


综上所述,MC-LADRC的整体结构如图2所示。

图2 MC-LADRC 控制结构Fig.2 Structure of MC-LADRC
2 设计改进型RISE-MC-LADRC 控制器

2.1 设计RISE 控制律

定义误差变量为

考虑各状态变量与其估计值之间的观测误差,将其代入式(12)可得
由式(10)、(12)及式(13)可得
对式(14)求导,结合式(12)、(13)可得
假设扰动Nd存在的关系可表示为

根据文献[27]定义辅助函数L(t)为
若符号增益β满足
辅助函数P(t)可表示为
式中:e2(0)为误差变量e2的初始值;Nd(0)为扰动Nd的初始值;L(σ)为t=σ时刻辅助函数L(t)的值。
由式(20)可知P(t)恒为正。对辅助函数P(t)求导可得
定义Lyapunov函数为
对式(22)求导,结合式(12)、(13)及式(21)可得
设计鲁棒控制项为
式中,ks为控制增益。
对式(24)积分,结合式(12),可得RISE 控制律为
式中:e2(t)为误差变量e2在t时刻的瞬时值;e1(σ)为系统跟踪误差在t=σ时刻的瞬时值;e2(σ)为误差变量e2在t=σ时刻的瞬时值。同理,后文中各物理量含义同样解释。
2.2 设计改进型LESO
由式(7)可得,加入模型补偿之后的LESO模型可表示为

由式(26)整理并近似处理可得

其中状态变量x2(t)可由电容电流测量值ic(t)间接获取,即
考虑到加入PD环节,可能会放大系统内部的高频噪声,因此在总扰动通道上增加一阶惯性环节来避免噪声的引入,最后得到改进型LESO 模型为

2.3 设计改进型RISE-MC-LADRC 控制器
本文提出的改进型RISE-MC-LADRC控制器由改进型LESO、模型补偿和RISE 控制律3 部分组成。由式(7)、(9)、(12)和式(25)可得改进型RISEMC-LADRC控制器的整体结构如图3所示。

图3 改进型RISE-MC-LADRC 控制结构Fig.3 Structure of improved RISE-MC-LADRC
3 稳定性分析
定理1给定一个系统式(10),如果在满足式(19)的前提下,控制增益α1、α2和ks符合的条件为
则式(25)中的RISE控制律能够保证e1、e2和r有界。
证明:依据控制理论中的稳定性分析,选取Lyapunov 函数式(22)。将式(24)代入到式(23)中可得
由文献[28]中证明当被控对象的动态模型未知且扰动有界时,LESO的观测误差是有界的,故有
式中,ϖ为有限正数。
由式(32)、(35)和式(36),定义集合O1、O2、O3为
若e1、e2和r属于集合O1、O2和O3内,则e1、e2和r有界;若e1、e2和r在集合O1、O2和O3之外,由式(36)和式(37)可知,<0,则e1、e2和r有界,从而证明被控系统是稳定的。
控制增益α1、α2和ks应满足式(32)的条件才能保证e1、e2和r有界,并由式(37)可知,收敛速度取决于α1、α2和ks的取值,故α1、α2和ks的值可以适当取大。
4 仿真分析
为验证本文提出的改进型RISE-MC-LADRC电压控制策略的有效性,在Matlab/Simulink 中搭建单相全桥逆变器系统的仿真模型。考虑逆变器系统实际运行情况,本文采用双极性PWM控制方式,并设置死区时间为3.2 μs。
表1 为逆变器系统参数,参考输入信号为80 sin(100πt) V;表2 为改进型RISE-MC-LADRC 控制器参数。当逆变器系统出现负载突变和非线性整流负载工况时,在传统的MC-LADRC 控制下,即使带宽足够大,输出电压波形依旧畸变严重,不符合控制要求,故在仿真中主要进行RISE-MCLADRC和改进型RISE-MC-LADRC的对比仿真。

表1 逆变器系统参数Tab.1 Parameters of inverter system

表2 改进型RISE-MC-LADRC 控制器参数Tab.2 Parameters of improved RISE-MC-LADRC controller
单相全桥逆变器系统在非线性整流负载和负载突变工况下,分别采用RISE-MC-LADRC 与改进型RISE-MC-LADRC两种不同控制方式进行仿真对比分析。
1)工况1非线性整流负载
图4和图5分别为两种不同控制方式下的仿真结果。其中,Ur(t)为参考电压信号;Uo(t)为系统输出电压;e(t)为系统跟踪误差;ess为系统的稳态误差;幅值为相对于基波的百分比。

图4 非线性负载下RISE-MC-LADRC 的仿真结果Fig.4 Simulation results of RISE-MC-LADRC under nonlinear load

图5 非线性负载下改进型RISE-MC-LADRC 的仿真结果Fig.5 Simulation results of improved RISE-MC-LADRC under nonlinear load
在0~0.1 s 负载端仅接入非线性整流负载,其由电阻为100 Ω、电感为1 mH、电容为200 μF 及二极管构成。图4(a)和图5(a)分别为两种不同控制方式下的输出电压波形,由图4(a)和图5(a)可以看出,RISE-MC-LADRC和改进型RISE-MC-LADRC两种控制策略均能保证逆变器系统稳定运行。图4(b)和图5(b)分别为相应的输出电压波形局部放大,由图4(b)和图5(b)可以看出,在RISE-MC-LADRC 控制下,逆变器系统输出电压波形在峰值处出现了一定程度的畸变;改进型RISE-MC-LADRC 中输出电压波形相对比较平滑,波形畸变较小,具有更好的输出波形质量。
图4(c)和图5(c)分别为两种不同控制方式下输出电压的跟踪误差,在RISE-MC-LADRC控制下,逆变器系统存在着较大的跟踪误差,其稳态误差达到8.15 V;改进型RISE-MC-LADRC 输出电压的跟踪误差在相对较小的范围内波动,其稳态误差仅为2.76 V,具有更好的跟踪性能。
图4(d)和图5(d)分别为两种不同控制方式下输出电压的频谱,RISE-MC-LADRC和改进型RISEMC-LADRC 两者对应的输出电压总谐波失真THD(total harmonic distortion)分别为2.54%、1.46%,后者具有更小的电压波形畸变率。
综上可知,改进型RISE-MC-LADRC 具有更好的抗扰性能,并能很大程度减少非线性负载所带来的影响,且跟踪误差更小、跟踪精度更高。
2)工况2负载突变
在0~0.045 s 系统空载运行,0.045 s 时负载端接入由电阻为50 Ω、电感为1 mH 串联组成的阻感性负载模拟负载突变。由图6(a)和图7(a)可以看出,0.045 s前系统空载运行,RISE-MC-LADRC和改进型RISE-MC-LADRC中的输出电压波形均较为平滑。0.045 s接入阻感性负载后,由图6(b)和图7(b)可以看出,RISE-MC-LADRC 的输出电压出现比较明显的电压跌落,由80.57 V迅速跌落至77.18 V,电压跌落幅度为3.39 V,并经过1.17 ms 电压达到稳定;改进型RISE-MC-LADRC 的输出电压波形仅发生微小抖动,电压由80.34 V跌落至79.50 V,电压跌落幅度为0.84 V,经过0.98 ms电压达到稳定。

图6 负载突变下RISE-MC-LADRC 的仿真结果Fig.6 Simulation results of RISE-MC-LADRC under load mutation

图7 负载突变下改进型RISE-MC-LADRC 的仿真结果Fig.7 Simulation results of improved RISE-MC-LADRC under load mutation
综上可知,改进型RISE-MC-LADRC 的抗扰性能要优于RISE-MC-LADRC,且快速性更好、跟踪精度更高。
为分析改进型RISE-MC-LADRC控制的单相全桥逆变器系统的鲁棒性,图8给出了负载端为阻性负载时,LC 滤波器参数波动的仿真结果。令LC 滤波器参数为n= 0.80、0.85、0.90、0.95、1.00、1.05、1.10、1.15、1.20,其中,n=Ln/L=Cn/C,L、C为表1所列标称值。结果表明,当系统参数波动时,系统仍可以保持稳定且具有较好的鲁棒性和稳态性能。

图8 参数波动下的仿真结果Fig.8 Simulation results under parameter fluctuations
5 结 语
当单相全桥逆变器系统中出现负载突变、非线性负载等强扰动时,传统的MC-LADRC的抗扰能力不足,无法满足控制要求。针对该问题,本文提出一种改进型RISE-MC-LADRC 的控制器,一方面采用抗扰能力更强的RISE 控制律替代传统LADRC中的LSEF,另一方面对传统的LESO 进行改进,将各状态变量与其估计值之间的误差作为各估计值导数的调节依据,从而提高LESO的观测精度,并通过Lyapunov 定理证明了系统的稳定性。在观测器带宽ωo一定时,对RISE-MC-LADRC 和改进型RISE-MC-LADRC 两种控制方式进行仿真对比分析。仿真结果表明,当逆变器系统中出现负载突变、非线性整流负载等强扰动时,在改进型RISEMC-LADRC 控制方式下的逆变器系统输出电压畸变率更低,其输出电压能准确跟踪参考电压,并且能更快的恢复到稳态,有效地减少了强扰动对逆变器系统的影响。因此,本文提出的改进型RISEMC-LADRC控制策略具有更好的控制性能。
