小面积核心筒施工机械的选型与布置
2023-10-31陈志标李日荣
陈志标,李日荣
(中国建筑第二工程局有限公司,广东 深圳 518048)
1 工程概况
腾讯广州总部大楼项目位于广州海珠区琶洲国际会展中心区,项目总建筑面积174 129m2,分为南、北2 栋塔楼。其中,南塔地下4 层,地上38 层,建筑总高度为206.75m。
本项目为双核心筒+外框钢结构,双核心筒高度为197.94m,形状大小一致,呈对称布置。单核心筒平面尺寸为30m×10m,面积为300m2,分别由4 个小筒组成(自编:A~D 筒),如图1 所示。核心筒25 层开始,D 筒取消,取消D 筒后的核心筒平面尺寸为24m×10m。核心筒内设置钢梁、钢柱、钢楼梯。核心筒墙体随高度的增加逐渐缩小,外墙最大厚度800mm,最小厚度400mm,内墙最大厚度550mm,最小厚度300mm。
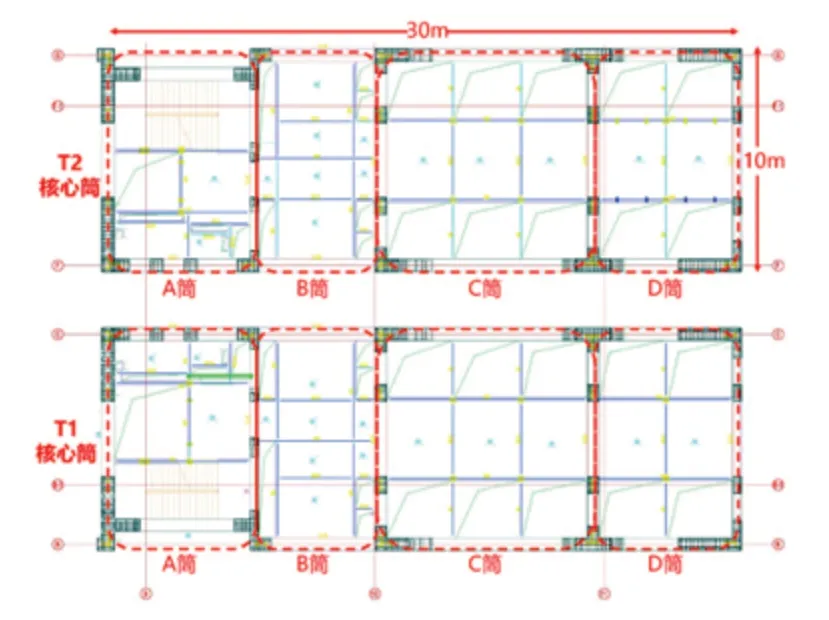
图1 双核心筒+外框钢结构
2 小面积核心筒施工重难点及解决方案
2.1 施工升降机的选型及布置
核心筒与其外结构形成不等高错层流水施工,施工人员无法通过核心筒外施工升降机进入核心筒内施工,需在面积仅240m2的核心筒内安装施工升降机来满足施工人员通行,施工升降机的安装位置既要保证爬模架体爬升前后人员通行不受影响,又要保证核心筒内结构施工不受影响。
2.2 塔机的选型及布置
本项目施工面积广、工期紧、吊装量大,需再安装2 台ZSL850 动臂塔机才可完全覆盖作业区域及满足相关构件吊运要求,且动臂塔机只能安装在核心筒上,小面积核心筒动臂塔机的具体安装位置既要满足动臂塔机使用时结构安全性、不与其他机械设备产生冲突,又要考虑对核心筒结构施工进度的影响。
2.3 竖向结构施工机械的选型及布置
因核心筒外结构均为钢梁+钢筋桁架楼承板,核心筒外钢梁需待核心筒墙体施工完成后才可焊接,爬架无法满足施工需求;核心筒内设置钢梁、钢筋桁架楼承板、钢楼梯等钢构件,水平结构钢构件需在核心筒墙体施工完成后才可焊接施工。采用内外全爬爬模体系来满足核心筒竖向结构模板施工需求。通过在爬模内架体顶板安装布料机,满足核心筒竖向结构混凝土施工。
2.4 水平结构施工机械的布置
爬模体系为内外全爬体系,爬模内架体顶部处于封闭状态,导致核心筒内水平结构构件无法施工。因此,通过爬模内架体预留材料吊运洞口,在爬模内架体主平台梁下方安装下挂提升设备,通过塔机将核心筒内水平钢构件吊运至核心筒内,进入核心筒后再转换为下挂提升设备吊运、安装,满足核心筒内水平结构的施工需求。
3 施工升降机的布置
核心筒外无满足施工升降机尺寸的洞口,如将施工升降机布置在核心筒外将影响外框楼承板施工。
核心筒仅A 筒设计有钢楼梯,该钢楼梯将作为施工过程中的消防疏散通道,如将施工升降机布置在A 筒内将影响该钢楼梯施工;B 筒设计钢梁、连梁、楼承板,仅南北侧有结构墙体,如将施工升降机布置在B 筒内将影响B 筒内水平结构施工;从核心筒25 层开始,核心筒收截面,D 筒取消,如将施工升降机布置在D 筒内,25 层以上将无任何附着点。
根据核心筒平面图,C 筒设计6 台正式电梯,电梯井净宽为9.45m×2.7m,满足施工升降机尺寸,因此在每个核心筒C 筒内分别安装1 台SC200/200G 双笼施工升降机(图2)。

图2 施工升降机布置图
4 动臂塔机的布置
4.1 动臂塔机受力传递路径
1)内爬式动臂塔机受力传递路径 动臂塔机荷载传递至塔机爬升框,继而传递至动臂塔机支撑主梁,最后通过牛腿传递至核心筒两侧墙体结构上,属于双面墙体受力。
2)外挂式动臂塔机受力传递路径 动臂塔机荷载传递至塔机爬升框,继而传递至主梁,主梁通过耳座、水平支撑及撑杆,最后通过预埋件传递与核心筒外墙外侧上,属于单面墙体受力。
4.2 动臂塔机布置分析
1)外挂式动臂塔机布置分析 外挂式动臂塔机整体受力将作用在一道结构墙体上,随着墙体的逐渐收缩,动臂塔机对结构安全影响逐渐增大;将动臂塔机外挂至混凝土墙体时,将影响核心筒外结构施工,动臂塔机所在位置结构需后甩。
2)内爬式动臂塔机布置分析 ①核心筒内仅A 筒设计有钢楼梯,该楼梯作为核心筒施工时消防疏散通道,因此,钢楼梯的施工进度需紧随核心筒竖向结构,无法布置动臂塔机;②筒内部布置施工升降机,受核心筒下挂平台及施工升降机影响,无空间布置动臂塔机;③核心筒在24 层开始取消D 筒,25 层以上将无任何附着点,无法布置动臂塔机;④B 筒布置南北侧为核心筒剪力墙,东西侧为连梁,可将动臂塔机支撑梁附着在B 筒南北侧核心筒墙体,且安装在此位置仅影响该核心筒楼板施工,后续可利用另一个核心筒的塔机进行施工。
相比外挂式动臂塔机,内爬式动臂塔机安全性更高,将动臂塔机安装至B 筒对核心筒结构的施工进度影响程度最小。
5 竖向结构施工机械的选型与布置
5.1 竖向结构施工机械的选型
核心筒内水平结构及核心筒外结构均为钢结构,无法与竖向结构同步施工,因此采用内外全爬爬模体系,即核心筒内外均设置爬升机位,满足核心筒竖向模板施工。
根据核心筒尺寸及面积,分别在每个核心筒布置1 台HGY24 布料机,最大覆盖范围24m,自重12t,布料机安装于爬模内筒架体上方,随爬模架体一同爬升。
5.2 爬模的布置
根据核心筒平面特点,按照核心筒内剪力墙为准划分爬升单元,核心筒外侧共划分为10 个爬升单元,核心筒内共分为4 个相互独立的爬升单元,核心筒变截面时爬模架体拆改不受影响。爬模架体设计总高度31.5m,包括顶平台、悬挑平台、过渡平台、主平台、液压平台、吊平台及下挂平台。顶平台用于钢筋绑扎及材料堆放,悬挑平台及过渡平台用于钢筋绑扎,主平台用于合模、退模,液压平台用于爬模爬升,吊平台用于回收爬模埋件系统,下挂平台用于施工人员上下通行。
爬模架体为封闭状态,通过在爬模预留材料吊运洞口的方式,在A 筒内架体预留3 500mm×1 300mm 洞口,C 筒预留1 800mm×1 500mm 洞口,D 筒预留3 100mm×2 740mm 洞口,核心筒内水平结构构件可通过爬模预留洞口吊至核心筒内进行施工。
5.3 布料机的布置
根据爬模特点,分别在每个核心筒爬模架体顶平台上方布置1 台HGY24 布料机以满足竖向结构混凝土浇筑:①将布料机布置在A 筒爬模顶平台中心,因塔机在B 筒,布料机与动臂塔机间距小,布料机与塔机形成的盲区大,无法满足施工需求;②将布料机布置在D 筒爬模顶平台中心,因24 层开始D 筒取消,不适宜安装布料机;③将布料机布置在C 筒爬模顶平台中心,动臂塔机与布料机形成的满足最小,满足现场施工需求(图3)。
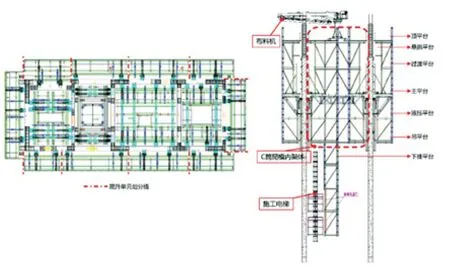
图3 竖向结构施工机械布置
6 爬模下挂提升设备施工
6.1 爬模下挂提升设备设计思路
核心筒爬模主平台梁下方生根,安装钢吊柱,钢吊柱间利用钢横梁连接,保证其稳定性,钢桁梁下方安装轨道梁、滑轮及电动葫芦,满足各方位吊运。下挂提升设备与爬模一同爬升(图4)。
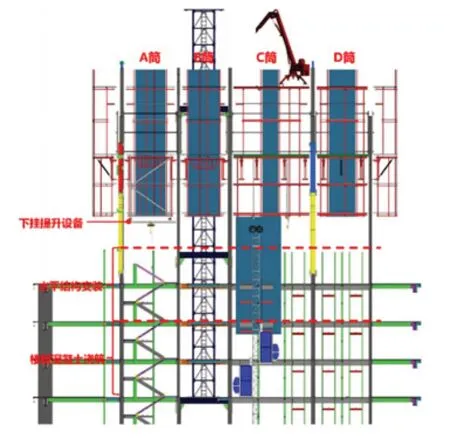
图4 爬模下挂提升设备施工
6.2 爬模下挂提升设备的布置
下挂提升设备共分为移动式下挂提升设备和固定式下挂提升设备;A 筒除爬模架体外无其他大型机械设备干扰,因此采用移动式下挂提升设备;B 筒内安装ZSL850 动臂塔机,且B 筒净空尺寸仅为5 500mm×9 320mm,无空间安装下挂提升设备;C 筒受双笼施工升降机、爬模4 层下挂平台影响,采用固定式下挂提升设备。
7 结语
在超高层建筑施工中,核心筒施工部署及机械布置协调对现场施工进度的影响极大,本文结合了核心筒结构概况,选择合理的机械位置和型号,组织各类机械协调配合,达到高效施工和精益施工的目的。
