面向工程应用的在线建模主动噪声控制方法改进
2023-10-31鹿澳沣董宁娟陈逸笑
鹿澳沣, 董宁娟, 陈逸笑, 薛 青, 沈 昊, 沈 星
(1. 南京航空航天大学 航空学院,南京 210016; 2. 中国飞机强度研究所,西安 710065)
近年来,人们针对如何有效治理低频噪声污染展开了许多研究,其中有源噪声控制(active noise control,ANC)方法因为其系统小、质量轻和低频噪声控制效果显著等优点已较成功地应用于汽车、船舶、航空、航天等受低频噪声影响严重的工程领域[1-2]。
有源噪声控制方法原理是根据初级声源(噪声声源)发出的原始信号状态,通过系统计算从次级声源(控制声源)发出1个振幅相同、相位相反的处理信号,在误差传声器(被控点)处利用声波干涉相消进行以声消声从而达到噪声控制的目的[3-4]。
其关键技术除了噪声控制环节,还包括次级路径建模环节。次级路径通常是指次级声源与误差传声器之间的物理通路,次级路径的存在,将导致系统输出的处理信号与原始信号之间存在偏差,这直接降低了系统的降噪效果,并影响系统的稳定性。次级路径建模方式依据系统状态分为离线建模和在线建模两大类。次级路径离线建模是在进入主动噪声控制环节之前先对次级路径进行辨识[5],该方法结构简单,易于硬件实现。目前绝大多数的主动噪声控制应用都是基于离线建模的基础上,例如封闭空间、管道、结构声等方面的噪声控制[6]。然而当外部环境发生变化明显时继续采用离线建模的结果用于系统中,控制效果将会降低。因此为了维持系统的控制效果,需对次级通道采用在线建模的方法。能够实现对次级路径的参数进行实时更新,当路径发生改变时能让系统快速恢复到稳定状态,从而保证系统的降噪效果及稳定性。
次级路径在线建模方法最早由Eriksson等[7]于1989年提出,他们用附加的随机白噪声作为次级路径建模信号,对次级通道进行在线建模。该方法缺点是次级建模信号与处理信号会相互干扰,严重时会导致系统不稳定、算法发散。针对 Eriksson等方法的不足,Zhang等[8-10]提出了一种包含基于额外附加滤波器的交叉更新次级通道建模方法,该方法有效地消除了噪声主动控制环节和次级路径建模环节的相互影响。在这之后,Akhtar等[11]将变步长最小均方算法(least mean square,LMS) 算法应用进来,提出了一种对附加随机白噪声功率连续性控制的方法,这种方法可以在一定程度上减弱次级建模信号对系统控制声源建模的影响。
次级路径在线建模方法种类虽然很多[12-13],且各方法仿真均有不错的效果表现,但都一直难以工程化,一方面是由于额外的次级路径建模计算量的引入大大加剧了主动噪声控制系统的设计难度和计算复杂度[14],相比于性能更好、功耗更低的实验室设备,工程应用中对高标准硬件的需求意味着系统成本的增加,长期、巨大的运算量对硬件本身功耗及发热量的增大也会导致其性能下降,使得控制系统的降噪效果大打折扣;另一方面是因为实际多通道的主动噪声控制系统中误差信号是由误差传声器直接采集得到而并非仿真中计算得到,各误差传声器所获取到的信号是初级声源和各次级声源经过次级路径后的信号混合而成的,通道数的增加会引发各次级路径间相互耦合的问题从而影响整个系统的稳定性,降低甚至丧失降噪效果。
针对上述问题,提出了面向工程应用的两种改进措施,具体包括在次级路径建模环节采取次级声源依序发声的建模方式,从机理上杜绝次级路径间相互耦合的问题,当外部环境发生变化时保证降噪效果及系统稳定性。在噪声控制环节引入多通道快速算法,不仅可以降低计算量,减少系统信号处理负荷,也可以放宽系统对硬件设备的要求,大大降低系统成本。
1 方法改进
1.1 多通道主动噪声控制系统
常见的工程类主动噪声控制系统一般包含多个通道,假设该系统包含I个参考传声器、J个次级声源和K个误差传声器,如图1所示[15]。
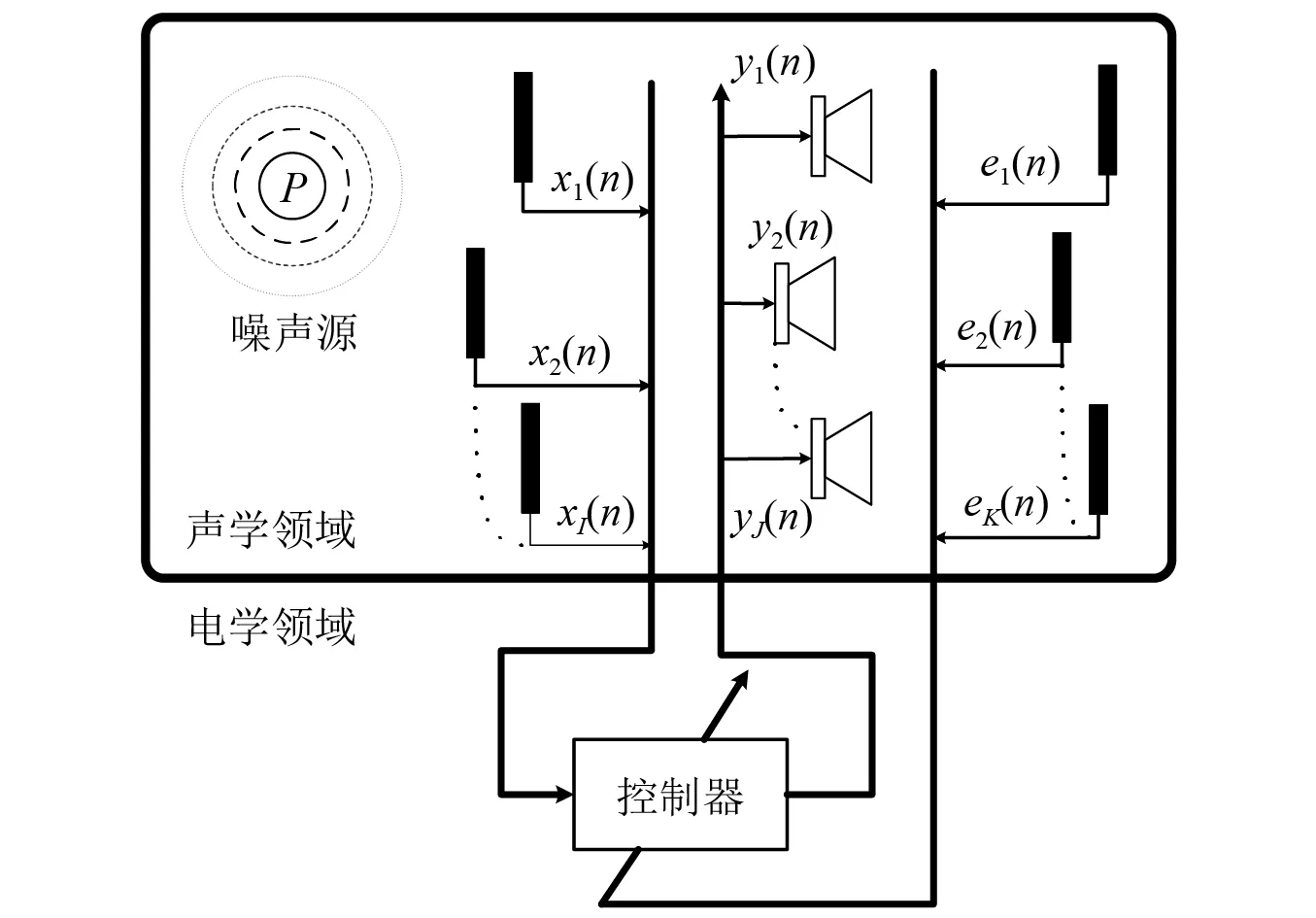
图1 多通道主动噪声控制系统框图
图1中,Pik为第i个参考传声器与第k个误差传声器之间的初级路径,共有I·K个次级路径。相应的,每个次级声源与每个误差传声器之间也都存在一条次级路径,图1中用Sjk(n)表示第j个次级声源与第k个误差传声器之间的次级路径,共有J·K个次级路径。
1.2 次级路径建模环节改进
本文提出的改进措施是基于多通道在线建模算法的基础上,图2虚线框图表示了在线建模算法的实现过程。
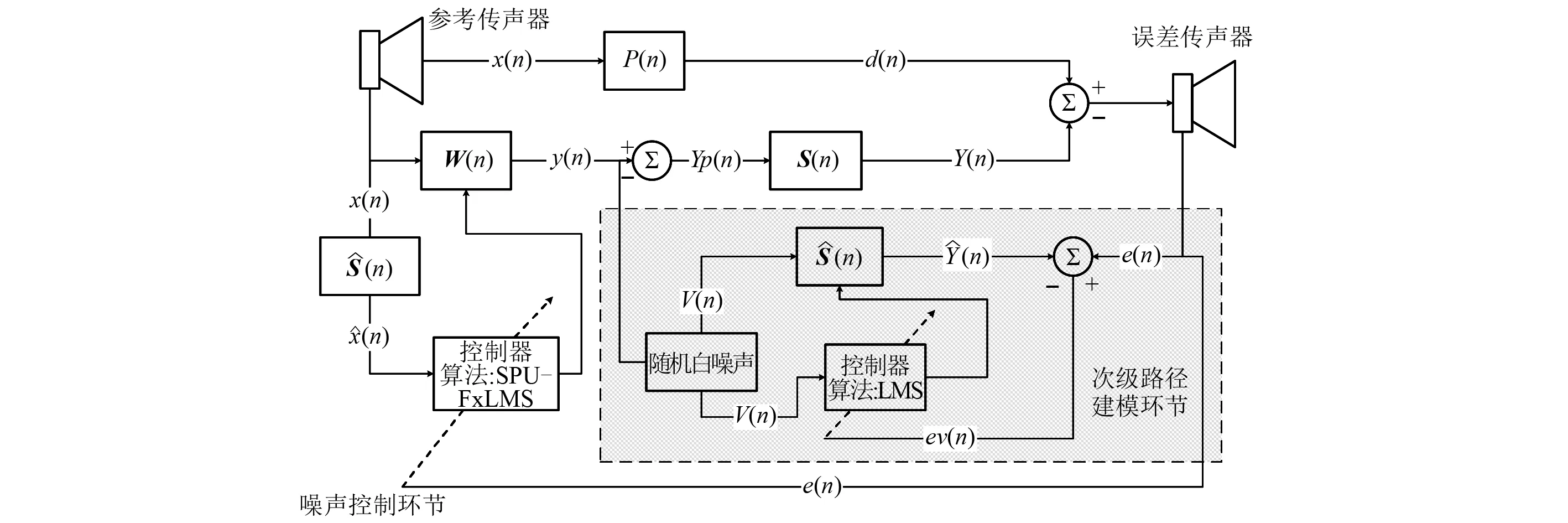
图2 基于在线建模的主动噪声控制系统流程图

设随机白噪声V(n)=[V(n),V(n-1),…,V(n-M+1)]T,并与噪声源x(n)不相关,则附加白噪声后的输出信号Yp(n)可表示为
Yp(n)=y(n)-V(n)=W(n)x(n)-V(n)
(1)
设W(n)=[w0(n)w1(n) …wL(n)]T表示控制器在第n个时刻的权系数,L为控制器权系数的阶数。则控制器在误差传声器e(n)处拾取的误差信号为
e(n)=d(n)-Y(n)=d(n)-Yp(n)*S(n)
(2)

(3)
(4)

-2ev(n)V(n)
(5)

(6)
[d(n)-Yp(n)*S(n)]}
(7)
采用次级路径在线建模算法能提高主动噪声控制系统的普适性以及准确性,但不同次级路径之间的相互影响是其一直难以工程化的原因之一。这里以1个简单的1×2×2的主动噪声控制系统为例,简述造成该问题的原因,如图3所示。
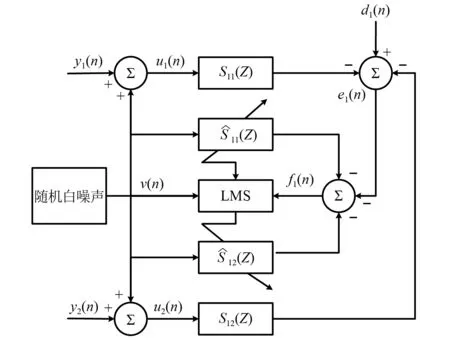
图3 1×2×2的次级路径建模框图

(8)
(9)
为了能有效解决这一问题,本文采用了一种如图4所示的次级路径在线建模方式。
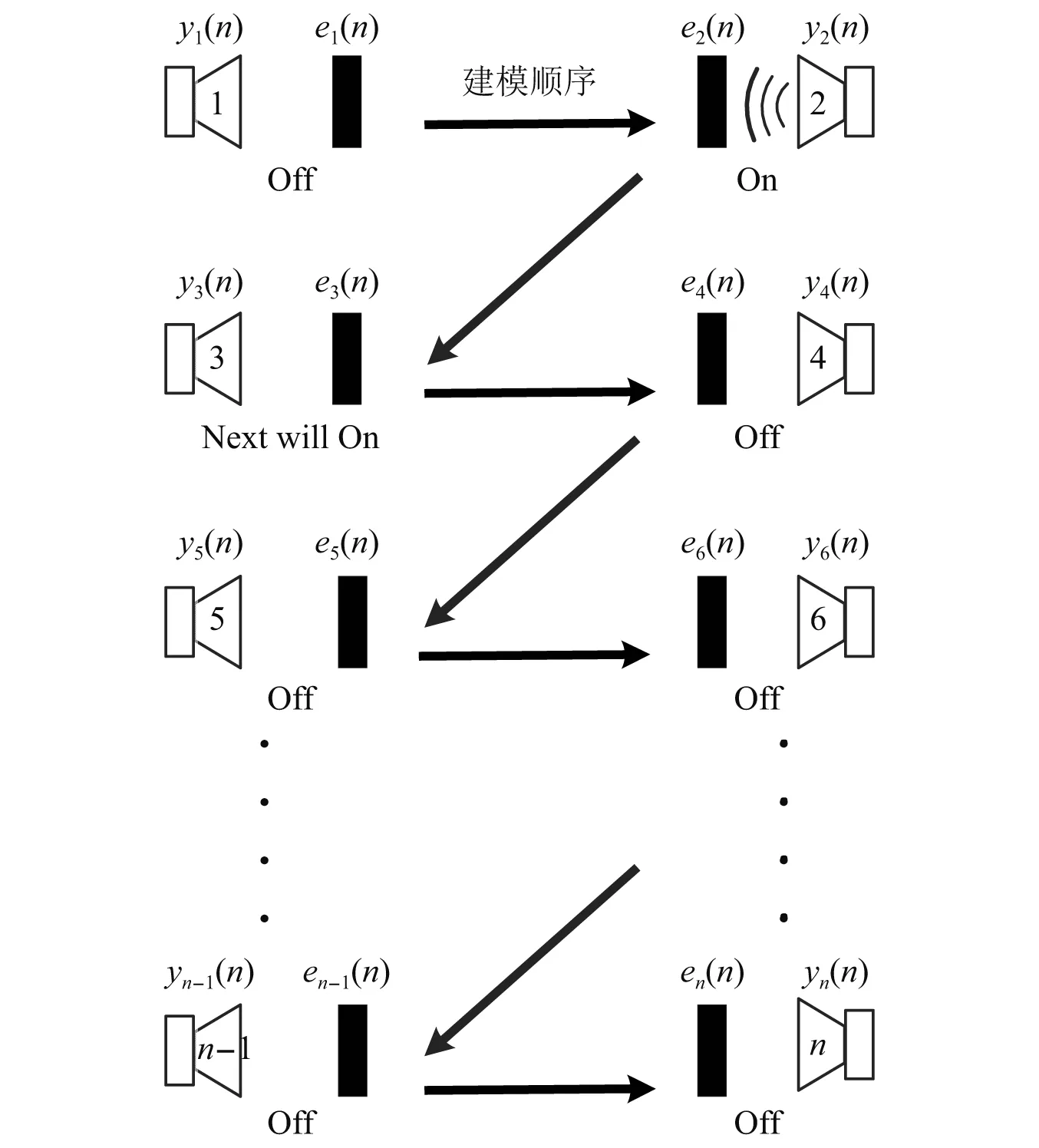
图4 次级路径在线建模方式流程图
该方式具体执行过程是在噪声主动控制开始一段时间后,1号次级声源已完成次级建模并停止发出额外随机白噪声,2号次级声源发出额外随机白噪声开始次级建模,接下来的次级声源依序发出附加随机噪声,每次只建模该次级声源对应的次级路径。
该建模方式从源头上杜绝了上述次级路径耦合的影响,而且不会增加任何计算量或成本。由于每次只有1个次级声源发出附加随机噪声,这不仅能增强系统稳定性,也使得在线建模所附加得随机白噪声能量对主动控制部分的影响降低,允许系统以更大能量的附加随机噪声进行建模,反过来使得建模精度更高。此外,由于每个次级声源对应的次级路径建模后需要等待一定时间才会再次更新,且建模的时间不会太久,因此可以采用较大的固定步长建模来在较短的时间内获得较为精准的模型。
1.3 噪声控制环节改进
在1.2节图2左下控制器框图中使用多通道快速算法以降低计算量从而平衡在线建模算法带给系统的额外计算负荷,这里的快速算法选择多通道连续局部迭代(sequentuial partial update-McFxLMS, SPU-McFxLMS)算法[16-18]。
对所提出的算法计算量作具体分析,这里以基于离线和在线建模的FXLMS算法以及本文所采用的方法进行计算量统计对比。三种算法在1个更新迭代周期的主要计算量集中在表1的5个步骤中。设多通道控制系统参数与1.1节一致,共有I个参考传声器,J个次级声源和K个误差传声器,控制器阶数长度为L,次级路径估计模型长度为M,连续局部迭代系数为P(未包含判断语句的计算量)。
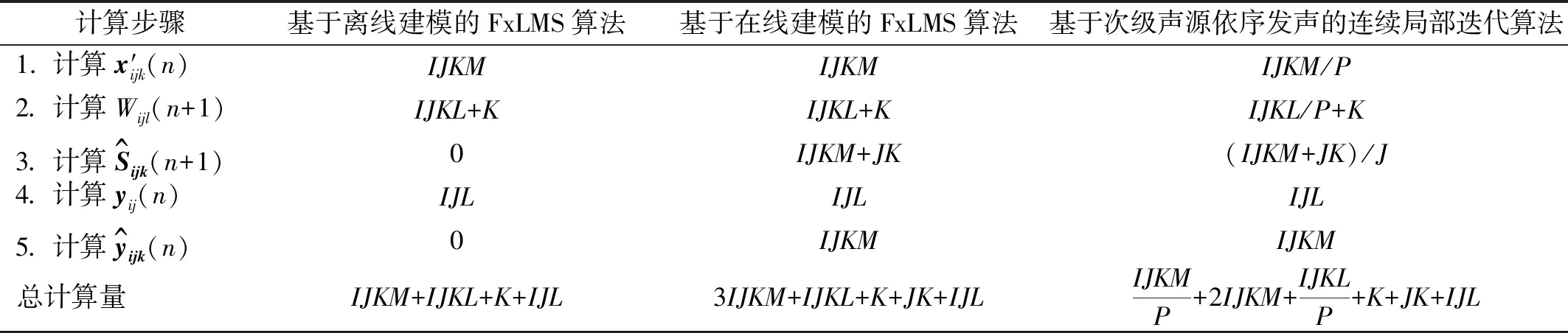
表1 算法所需计算量统计
为使对比更加直观清晰,作出以上算法所需的计算量对比表2,其中设I=1,J=K=16,M=L=128,P取4。
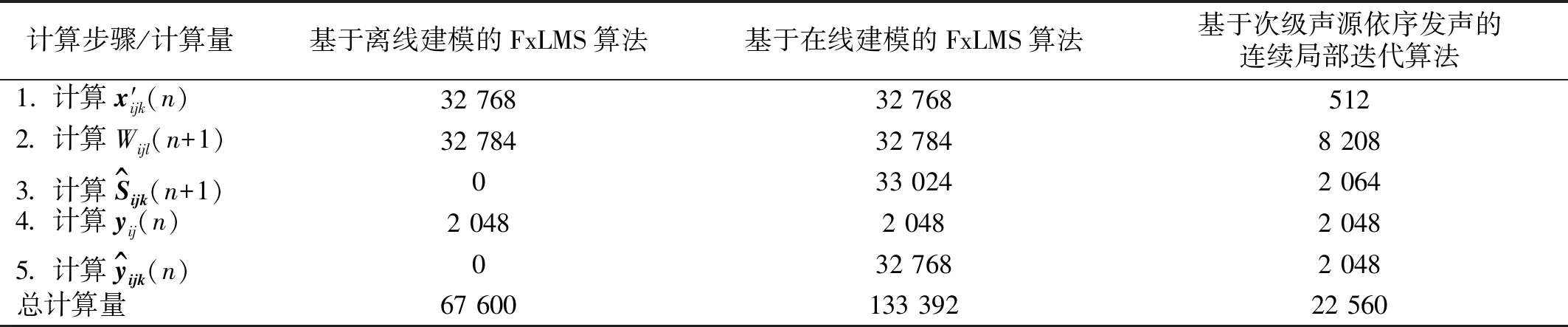
表2 算法计算量对比
2 仿真效果验证
改进后的方法除了降低计算量和增强稳定性以外,本章通过MATLAB软件建立仿真模型对其有效性进行效果验证。
2.1 仿真设置
假设系统规模为1×16×16,即1个初级声源、16个次级声源和16个误差传声器,参考噪声为100 Hz,200 Hz的单频信号组合后叠加白噪声信号,并保证输出的声压级在95~100 dB左右。设置好的参考噪声幅值图和频域声压级图如图5(a)~图5(c)所示。取均值为0、方差为0.05的高斯白噪声作为次级路径模型的建模信号。在MATLAB中用有限长单位冲激响应滤波器(finite impulse response,FIR)滤波器模拟初级路径和次级路径,其阶数都设为64,并以矩阵形式将所有路径数据存储起来。
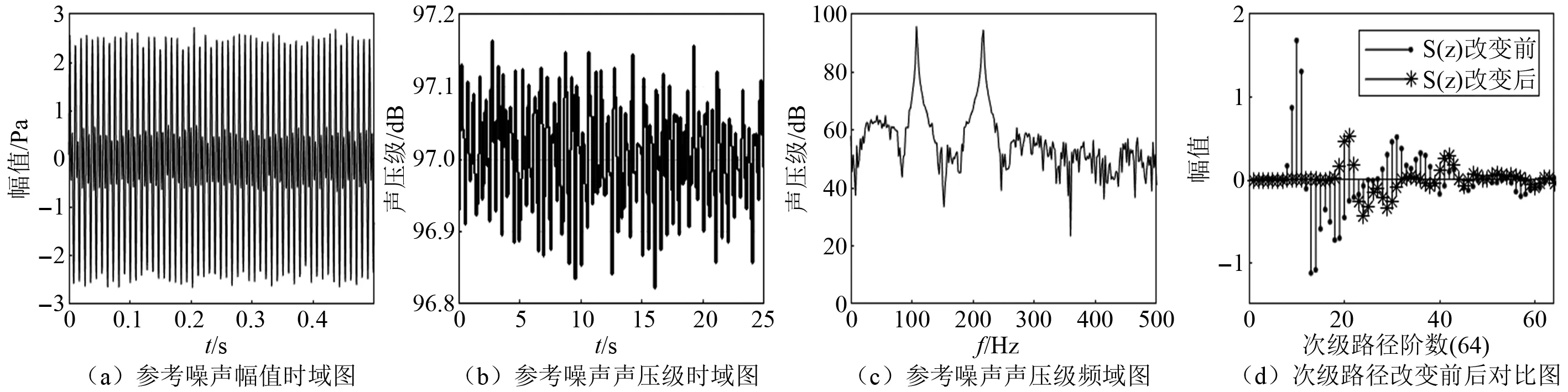
图5 仿真设置图
设噪声控制环节的控制器迭代步长为5×10-5,次级路径建模环节的控制器迭代步长为1×10-4,总更新迭代次数50 000次,采样率2 kHz,连续局部迭代算法系数P为4。考虑到实际情况下次级路径是随时间不断变化的,因此假设系统迭代30 000次时次级路径发生改变。其一条次级路径改变前后的脉冲响应如图5(d)所示。仿真结果均是在相同仿真条件下取20次平均所得的结果。
2.2 噪声控制效果
收敛速度、稳态误差和计算量是噪声控制环节所关注的3个主要性能指标,计算量在1.3节讨论过,因此本节将从其他2个方面对其仿真结果进行分析,仿真结果如图6所示,这里定义系统降噪量为
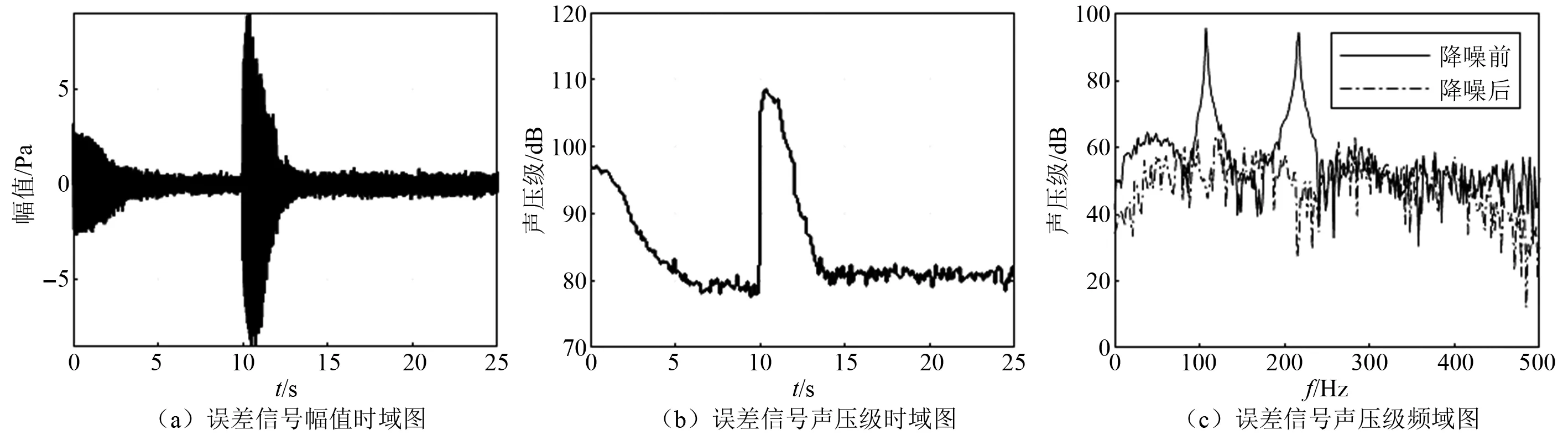
图6 噪声控制仿真效果图
(10)
在收敛速度方面,通过图6(a)可以发现误差信号(降低后的噪声)在时域的幅值衰减速度,整体收敛速度还是令人满意的,即使次级路径突然发生变化,误差信号的幅值也能在短时间内迅速收敛,达到控制噪声的效果;在稳态误差方面,图6(b)和6(c)分别为误差信号的声压级时域图以及频域图。由图6(b)和图6(c)可以得出,误差信号在关键频率(100 Hz,200 Hz)能有20~30 dB的降噪效果,总声压级也能降低17~18 dB,噪声控制效果明显。
2.3 次级路径在线建模效果
次级路径在线建模的精度也对噪声主动控制的效果有很大影响,为了精确衡量次级路径在线建模的效果,定义次级路径建模误差为
(11)
ΔS=10lgS
(12)
作仿真结果如图7所示,因为次级路径模型的阶数较大,这步仿真环节将迭代步长增加到500 000次。从图7(a)可以得出,次级建模(次级路径建模)误差最终下降到-15左右,因为仿真所采用的次级路径阶数较大为64,所以可以认为次级路径建模的精度已经十分接近真实次级路径真实的精度,并且即使次级路径突然发生改变,本文所提出的方法依然能快速追踪并保持较低的稳态误差值。图7(b)和7(c)更加直观地展示了这一特点,图7(b)是图7(a)中A点的次级路径以及其建模的脉冲响应,图7(c)是图7(b)中B点的次级路径以及其建模的脉冲响应。由图7(b)和图7(c)可以发现,代表次级路径模型的曲线和代表次级路径真实值的曲线慢慢靠近至几乎重合,次级路径建模的误差随着迭代步长的增加而减小,次级路径模型建立准确。
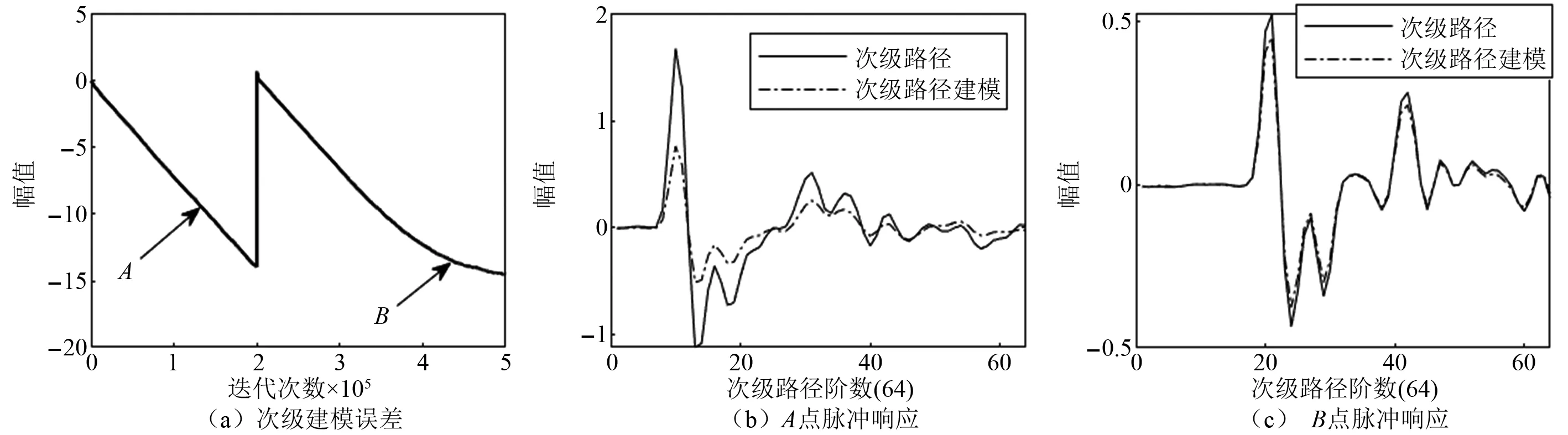
图7 次级在线建模仿真效果图
3 主动噪声控制试验
为了验证本文所提出方法在实际工程应用中的效果,在实验室环境下开展了基于在线建模的多通道主动噪声控制试验。
3.1 试验环境
3.1.1 试验系统
试验的主动噪声控制系统规模为1×4×4,即1个初级声源、4个次级声源和4个误差传声器。系统控制器的实现是基于NI-PXI平台,使用LabVIEW FPGA模块进行控制程序的编写。其中,所采用的NI-PXI平台的相关硬件信息如表3所示。
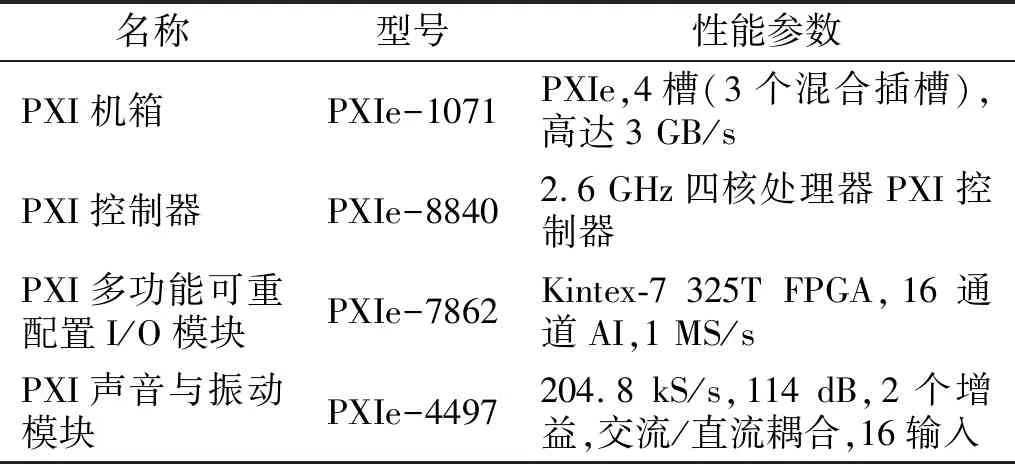
表3 NI-PXI平台硬件信息
表3中的控制器与扬声器、传声器等器件结合起来便可以组成1个主动噪声控制系统,该系统的结构框图如图8所示。
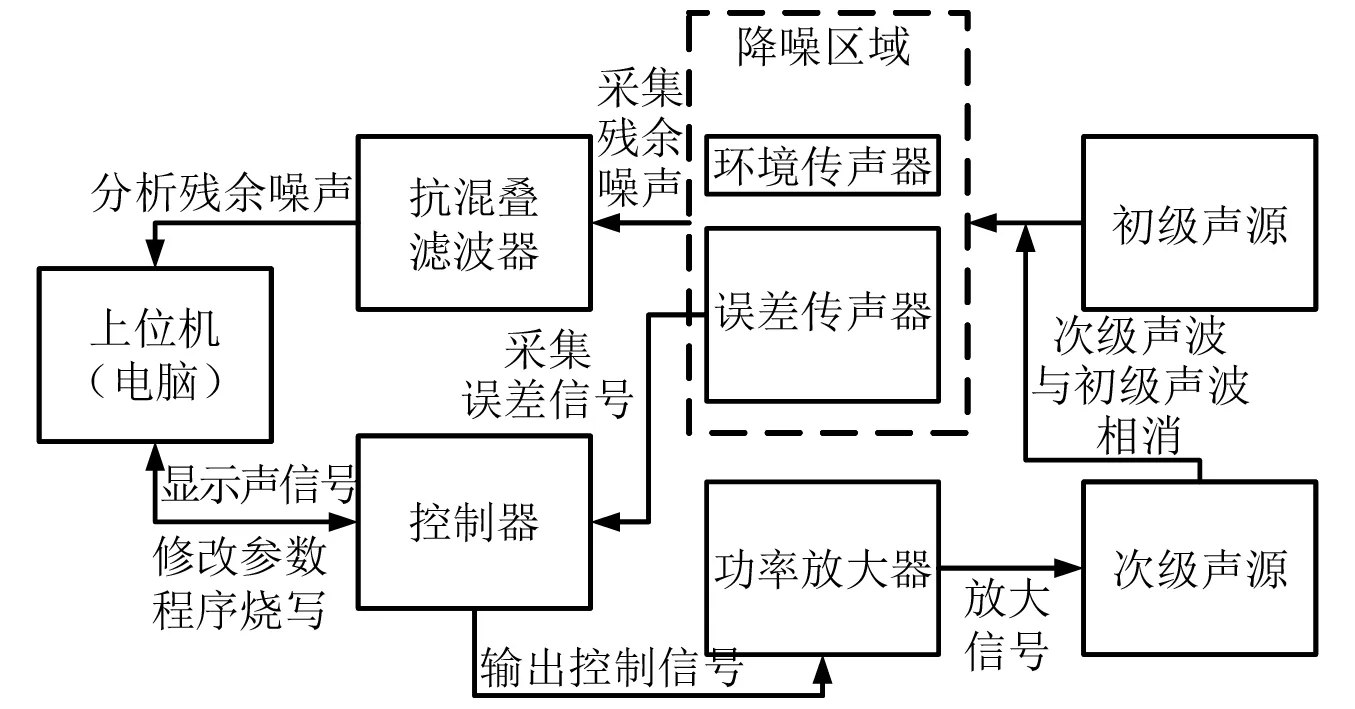
图8 系统结构框图
3.1.2 试验条件
试验相关条件的设置与2.1节的仿真设置条件相同,为保护试验操作者听觉,初级声源发出的参考噪声幅值进行一定程度的降低。表4列出了6个环境传声器处所测得的降低后参考噪声总声压级大小。

表4 环境传声器处的噪声总声压级
3.2 试验过程
3.2.1试验平台搭建
以图8系统搭建的试验平台如图9所示。图9中,环境传声器1~环境传声器4分别与误差传声器1~误差传声器4绑定,环境传声器5和环境传声器6置于两次级声源之间。
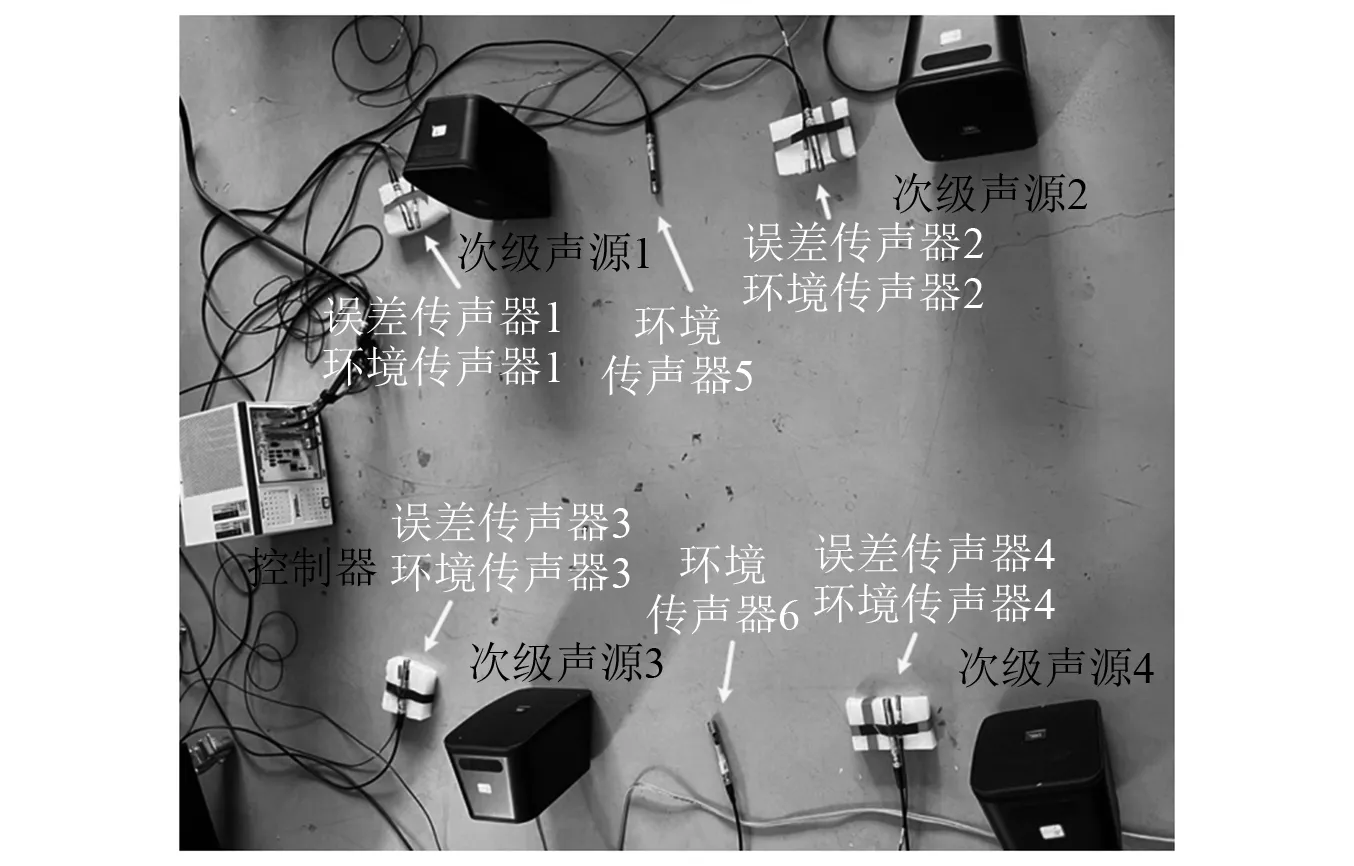
图9 试验平台
试验流程为两侧的喇叭作为初级声源发出参考噪声,4个音箱作为次级声源发出抵消声波,抵消声波大小由使用本文方法的控制器计算得到,并分别在4个较小的传声器(误差传声器)处完成噪音的主动控制,放置6个较大的传声器(环境传声器)完成试验场地各处的噪音测量。
由于外部噪声的存在,且传声器对声信号的测量容易受到干扰,因此测得的噪声具有一定的误差。本文图表的总声压级和各频段对应的声压级数据均经过多次试验测量后作平均处理。
3.2.2 环境噪声测量
将控制后的残余噪声水平与其环境噪声(底噪)对比可以直观地评价本文方法改进后的降噪效果,图10是各个环境传声器所测底噪的三分之一倍频程图。注意到图中的柱体宽度随着频率增加慢慢变大,这是因为人耳能听到声音的频率约20~20 000 Hz,但是对不同频率敏感度不一样,区分低频容易如50 Hz和100 Hz,但是区分高频越来越困难如10 000 Hz在和10 050 Hz。所以在频谱分析中,低频分得尽量细一点,对于高频分得尽量粗一点,又因为图中横坐标单位间隔相同,因此采用改变图中柱体宽度用以表达这种倍频程的思想。表5列出了6个环境传声器处底噪的总声压级。

表5 环境传声器处的底噪总声压级
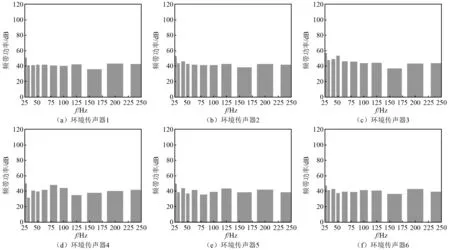
图10 环境传声器处的底噪三分之一倍频程图
3.2.3 次级建模方式
在试验中采用1.2节提出的次级建模方式以验证其可行性。具体操作方式是序号1~序号4的各个次级声源每隔5 s(即10 000循环次数)依次发出附加随机白噪声,每次只建模该次级声源对应的次级路径,并在噪声得到控制的一段时间后,改变次级声源的摆放角度及位置以验证次级路径在线建模的自适应性。
3.3 试验结果
3.3.1 噪声控制环节
试验结果所测残余噪声的三分之一倍频程,如图11所示。系统降噪量如表6和表7所示。
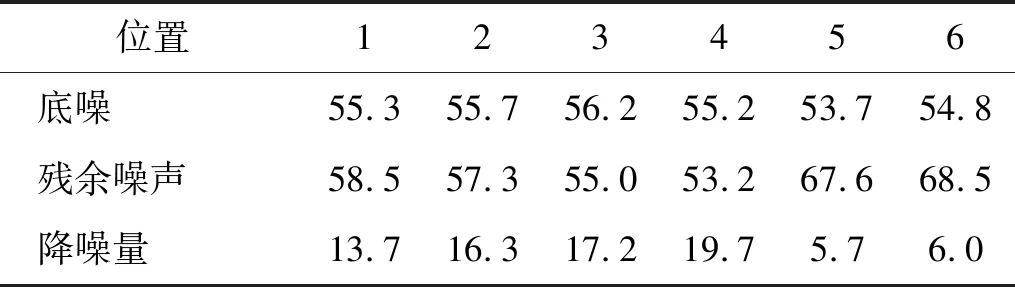
表6 降噪表现
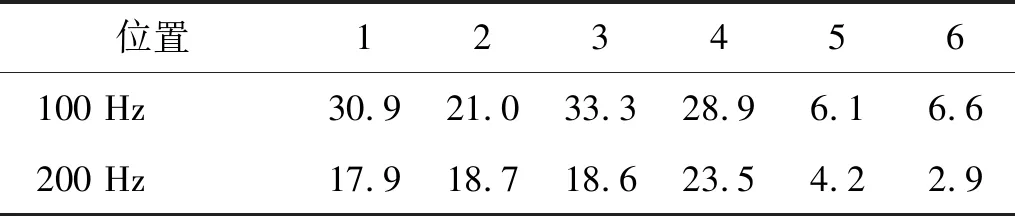
表7 关键频率降噪量
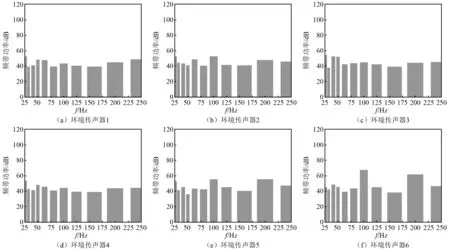
图11 环境传声器处的残余噪声三分之一倍频程图
可以发现,位置1~位置4的降噪量能达13 dB以上,关键频率处能达18~30 dB,降噪幅值能达15 dB以上,说明该方法对低频噪声的控制效果明显。噪声水平已几乎经降至底噪水平;离误差传声器稍远的位置5和位置6处的降噪水平则相对较差,但也有接近6 dB的降噪水平。表明改进后的降噪系统在控制点处的降噪效果较为明显,在非控制点处也有一定水平的降噪效果,其数据与2.2节的数据对比可以发现实际试验结果与仿真结果也是十分接近的。在计算量方面,降噪程序调用控制器内存明显减少,系统运算量相比之前大幅降低。
3.3.2 次级建模环节
试验结果是各误差传声器在系统工作后每5 s(节x给定的各次级声源发出白噪声)截取的时域波形图,如图12所示。从图12可以得出,各个次级声源所对应的次级路径随着时间依序建模,各处的误差噪声幅值也随着减小,最终各处的误差噪声幅值收敛至略高于底噪水平,幅值大小接近于所附加的额外白噪声幅值大小,且其收敛速度还是较快的,每个次级声源能在给定的次级建模时间内对噪声起到较好的控制效果。次级路径的突然改变对系统影响方面,在规定次数的试验中未出现系统发散无法收敛的情况,次级声源的声音会随着路径的改变发生一定的变化,但误差噪声幅值最终在短时间增大之后完成收敛保持在1个较小值。相比于传统的在线建模,采用这种方式的次级在线建模稳定性更高,具有工程应用的价值。
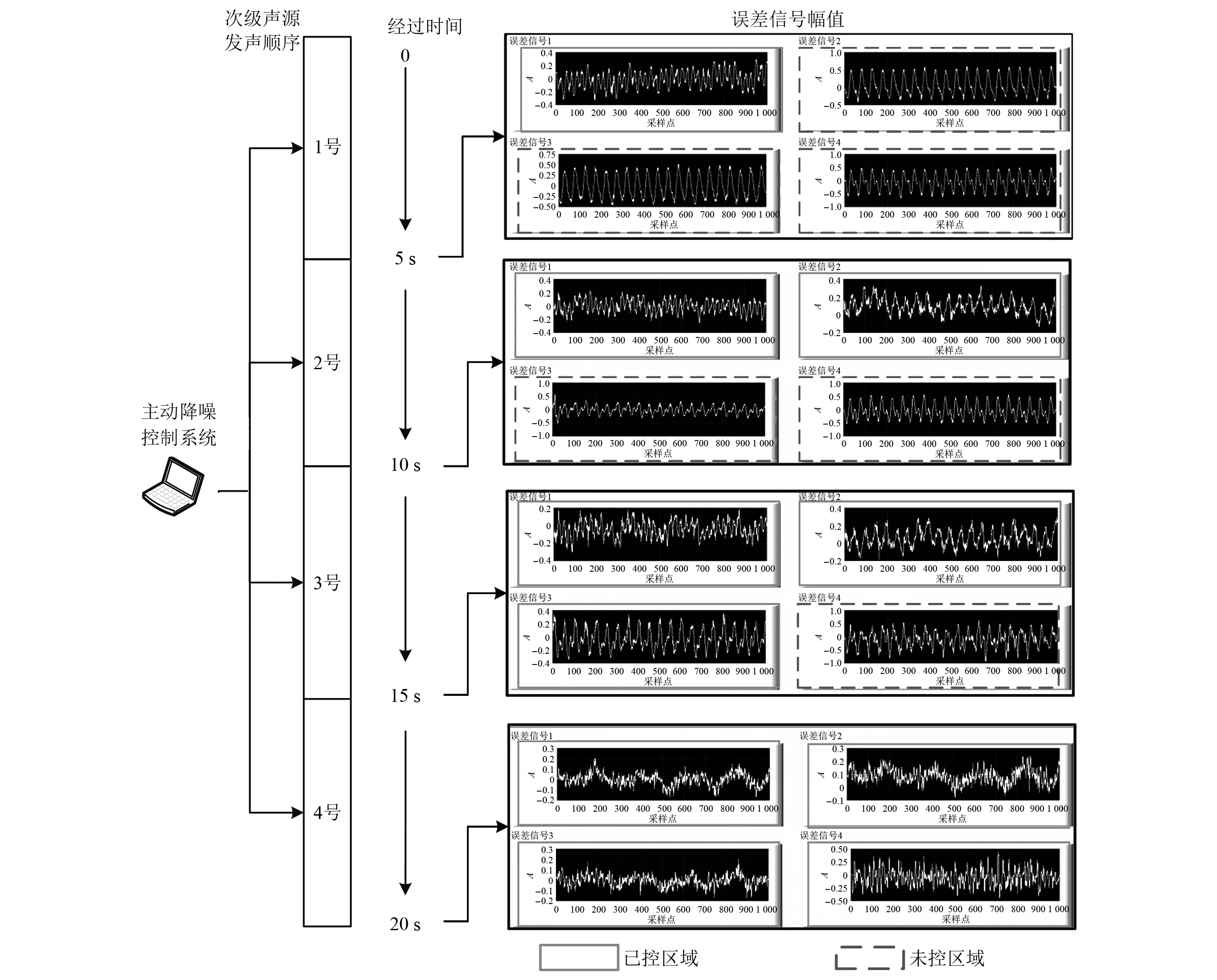
图12 依序在线建模
4 结 论
本文提出了面向工程应用的在线建模主动噪声控制改进措施,并分别从理论推导、仿真分析以及实际试验3个方面验证了该方法的有效性以及工程应用可行性。改进后的主动噪声控制系统能取得13~20 dB的总声压级降低水平以及18~30 dB的关键频率处声压级降低水平,降噪效果明显。相较于其他方法,其工程应用的具体优势包括:
(1) 次级建模环节采用在线建模方式,对次级路径变化敏感,能实时计算和调整次级建模参数以适应实际应用中次级路径的不断变化。
(2)针对使用在线建模方式时会出现系统不稳定的问题,以次级声源依序发声对其相应路径建模的方式,从根本上消除次级路径相互耦合的影响,减少算法发散的可能,增强了系统稳定性。
(3)噪声主动控制环节采用多通道快速算法,结合改进后的次级路径建模方式能使系统在1个更新迭代周期内所需的总计算量与传统在线建模算法相比减少80%~85%,与传统离线建模算法相比减少60%~65%,在保证次级路径建模方式为在线建模的基础上大大降低计算量,减少了系统信号处理的负荷,从而放宽系统对硬件的使用要求,大大降低系统成本。
