基于信息融合及双连接注意力残差网络的轴承故障诊断
2023-10-31张洪亮余其源秦超群张宇腾
张洪亮, 余其源, 秦超群, 王 锐, 张宇腾
(1.安徽工业大学 管理科学与工程学院,安徽 马鞍山 243032; 2.苏州大学 轨道交通学院,江苏 苏州 215131)
轴承作为旋转机械的关键部件,一旦发生故障直接影响设备性能,甚至会造成安全事故。因此,精确地诊断轴承健康状态对设备平稳运行有着重要意义。
随着信息化技术的广泛应用,各种工业场景下收集的振动数据,被越来越多地应用到故障监测中,这使得基于数据驱动的故障诊断技术得到了快速发展,并在实际生产中得到广泛应用。传统的故障诊断方法主要包含振动信号的预处理、特征提取和故障状态分类3个部分。信号的预处理包括对采集到的信号进行降噪、频域或时频域转换、数据的重采样等;特征提取则是从预处理完成的数据中,提取不同类别的特征信息;故障分类多采用人工神经网络、支持向量机、决策树、随机森林等典型分类技术。传统方法虽然对提升故障诊断效果有一定价值,但存在数据预处理需要大量先验知识、特征提取不充分、不同场景下的泛化性能差等不足。
近些年,由于深度学习的广泛应用,诊断网络往往可以表示为复杂目标函数与变量关系的深层结构,这使轴承故障诊断研究得到进一步发展。利用深度学习理论,研究者开发出了多种深层网络模型用于故障数据的自适应学习,实现数据间非线性关系的深度挖掘,从而摆脱对专家知识的依赖。故障诊断中采用的经典深度学习方法主要包括自动编码器、卷积神经网络(convolutional neural networks,CNN)、深度残差网络、循环神经网络、深度置信网络及长短时记忆网络。在上述方法中,CNN作为一种典型的多级前馈式神经网络[1],有着利于模型训练的稀疏连接结构和权值共享特性,因此被学者们引入故障诊断领域并开展了深入研究。Wen等[2]提出基于LeNet-5的CNN故障诊断方法,将原始信号转换成二维图像,消除了手工提取特征的不足。Zhang等[3]针对深度学习方法不能提取有效特征的问题,提出了利用短时傅里叶变换将原始信号转换成二维时频域输入的方法,并采用改进的CNN完成高效分类。Xue等[4]提出从一维和二维结合的CNN并行结构中提取深度特征,然后采用融合策略进行连接,获得了更可靠的诊断效果。Zhang等[5]提出一种基于深度CNN的多模型集成深度学习方法,实现了高维样本的故障识别。
由文献分析可知,轴承故障诊断研究多采用基于CNN及其改进的方法。该类方法通过构建深层次的诊断模型增强特征提取能力,在一定程度上提高了分类准确率,但随着网络深度的增加,模型训练变得困难,难以进一步提高分类效果。一方面,深度网络在训练时会发生梯度弥散,出现过拟合;另一方面,该类网络模型仅学习来自一个传感器收集的信号数据,而其中包含的故障特征信息有限,使得模型难以适应恒定状态以外的负载或转速改变下的工作条件,这些因素使CNN在故障诊断领域的深入发展受到了限制。针对上述问题,He等[6]提出的残差网络通过在正向传播中添加快捷连接,对深层网络反向传播时的梯度消失问题进行改善,增强了模型对深层特征的提取能力。Yang等[7]在卷积自动编码器中引入残差学习,提出残差宽核深度卷积自动编码器,提升了模型的去噪和特征提取能力。袁彩艳等[8]针对深度CNN中的信息传递差异,设计出卷积注意力改进的残差密集网络,实现了提取特征的重要性区分。此外,基于一维或二维CNN的多传感器信息融合策略也被逐渐应用于故障诊断领域,以解决故障信号中包含的特性信息不足。Bai等[9]利用短时傅里叶变换得到不同传感器采集信号的时频图像,然后将其融合并作为模型的多通道输入。Zhang等[10]把来自不同传感器的信号按一定长度切分为子序列,再将对应位置的序列叠加,转换成多传感器数据的灰度图像作为CNN的输入。Peng等[11]利用融合嵌入层,将每个传感器的高级特征变为低维特征,实现了传感器信号在特征维度的信息融合。由此可知,传感器信号可在输入层与特征层进行信息融合,不同的信号融合方式,可以体现模型数据流特征信息的差异性。
基于上述文献的启发,本文提出了一种多传感器信息融合与双连接注意力残差网络(multi-sensor signal fusion and double-connected attention residual network,MSF-DARN)的故障诊断方法。首先,以不同位置的传感器为信号源,采用数据信息融合策略将单传感器对应时间收集的振动信号,融合成多通道输入。然后,设计了双连接注意力残差模块,实现网络对特征信息的差异性划分,使提取到的故障特征更具有鉴别力,并通过堆叠该模块加深网络,实现模型对融合信号中隐含故障特征的深度挖掘。最后,利用全局平均池化来减缓深层网络所带来的梯度消失问题。通过两个数据集下的变工况试验,验证了所提方法的有效性。
1 基本理论
1.1 CNN网络结构
CNN是一种多隐层的前馈神经网络,拥有强大的表示学习和特征提取能力,其基本结构包含卷积层、池化层、全连接层和输出层。其中,卷积层与池化层构成了网络的特征提取器,拥有共享权值和稀疏连接的特性;全连接层与传统的前馈式神经网络类似,通过处理在输入数据中提取到的高维特征,实现具体的分类任务。
卷积层是整个CNN的核心模块,它将卷积核与特征图覆盖重合的区域进行加权求和,然后使用激活函数进行非线性变换,得到对应的输出特征值,同时利用稀疏连接和权值共享机制,遍历整个输入特征图。具体数学表示如下
xi+1=f(wi⊗xi+bi)
(1)
式中:f(·)为卷积操作中使用的激活函数;⊗为卷积运算;wi为卷积核的权重系数;bi为当前卷积操作中的偏置;xi为卷积层的输入;xi+1为经卷积运算后得到的输出。
全连接层中,输入与输出的神经元相互连接,最终的输出节点个数等于分类任务的类别数。为了实现多分类任务,选用softmax作为激活函数
(2)
式中:n为类别数;x为最后一层的输出。通过softmax的处理,使得最后的输出满足分类任务类别个数且概率分布和为1。
1.2 全局平均池化
全局平均池化(global average pooling,GAP)是对网络最后一层卷积得到的特征图,按通道计算每个特征图平均值的操作,最终输出维度与最后一层的特征图相同。相比于全连接层,GAP直接实现了降维,大大减少了网络训练参数的数量,可以减少过拟合的发生的概率。计算过程见参考文献[12]。
2 双连接注意力残差网络模块
故障模式的判别往往需要利用信号数据的深层特征,而单一化的网络结构很难完成对融合信号的深度特征学习。因此,针对多传感器融合的数据输入,有必要构建一个利于特征学习的深层网络。但随着网络层数的增加,训练过程会因深层结构出现梯度弥散导致失败,而构成残差结构的跳跃连接缓解了梯度消失问题,加快了训练速度。基于此,本文采用残差模块作为加深诊断网络的基本结构。同时,针对残差网络提取的通道特征进行差异性划分,从而区别出不同通道特征信息的重要性,进一步提升故障判别的效果。
2.1 双连接残差网络模块
融合多传感器信息的输入数据包含大量故障特征信息,为了能有效提取其中的故障特征,本文采用可以对信号数据进行逐级学习的深度网络来实现特征学习,从而挖掘出更丰富的抽象特征。此外,通过简单的堆叠特征提取操作来加深网络结构,容易导致训练过程出现过拟合。因此,本文基于跳跃连接的思想构建出一个带有双连接的残差模块,利用该模块来加深诊断网络的深度。
如图1所示,不同于传统残差网络仅把输入添加到与其同维度的卷积结果中,双连接残差网络利用跳跃连接1将原始输入并联至第一层卷积的输出,再利用逐点卷积扩充输入维度,最后采用跳跃连接2与第二层卷积输出相融合。通过反复重用前次的信息,克服单向信息流动带来的梯度弥散,以此实现对输入信息的深层次挖掘。
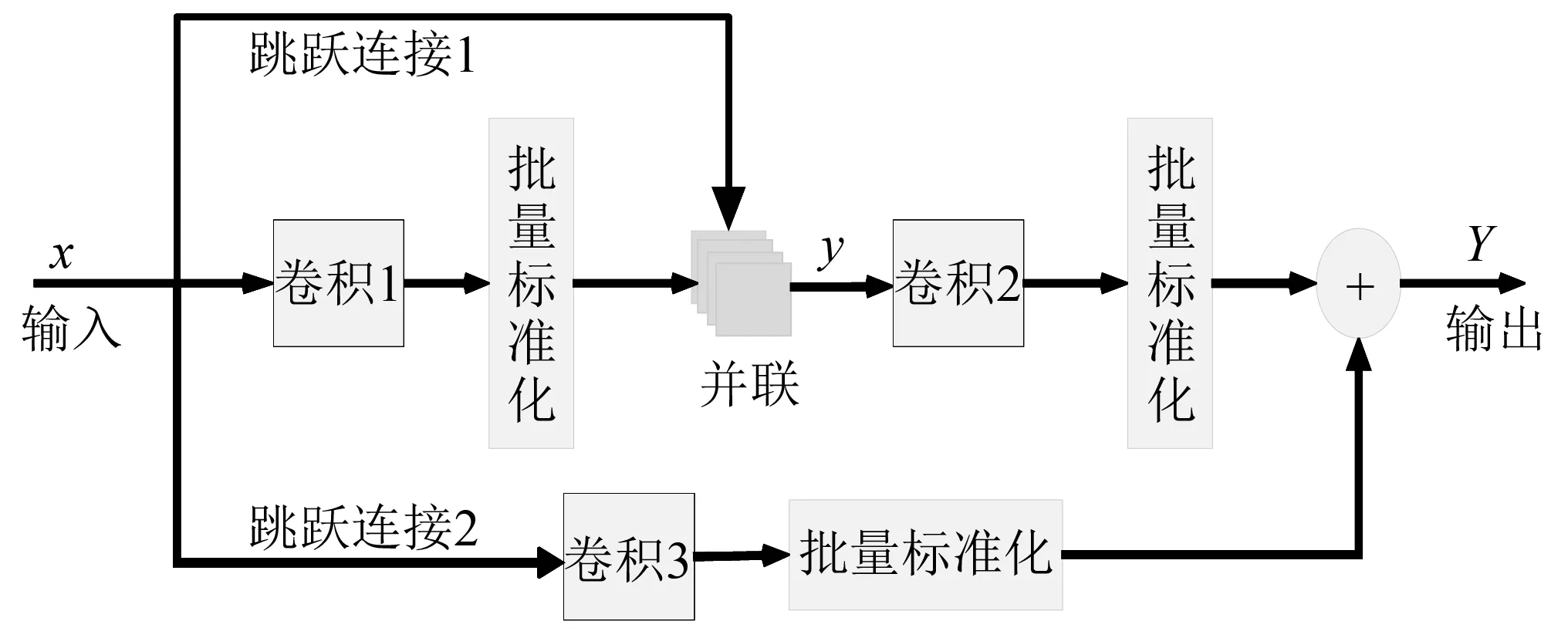
图1 双连接残差网络
设该模块的输入为x,并联后的输出为y,整个网络的输出为Y,则
y=f1(w1*x+b1)∪x,
Y=f2(w2*y+b2)⊕f3(w3*x+b3)
(3)
式中:f1,f2,f3为卷积操作的激活函数;w1,w2,w3及b1,b2,b3分别为对应的权重系数和偏置项。
2.2 注意力机制模块
由双连接残差模块构成的诊断网络可以提取大量的故障特征信息,但并不是所有的信息都有利于故障判别,为了区别所提取特征的重要性,本文引入了SE(sequeeze-and-excitation networks)注意力机制模块[13],以获取不同通道特征的权重系数,进而使学习到的特征更有利于故障识别。
SE模块的结构如图2所示,主要包括压缩、激励和乘积3个步骤。对于输入特征图U,SE首先在每个通道上执行GAP,即压缩操作Fsq(·),它使H×W×C的输入特征沿通道方向变成1×1×C的特征图,计算过程如下
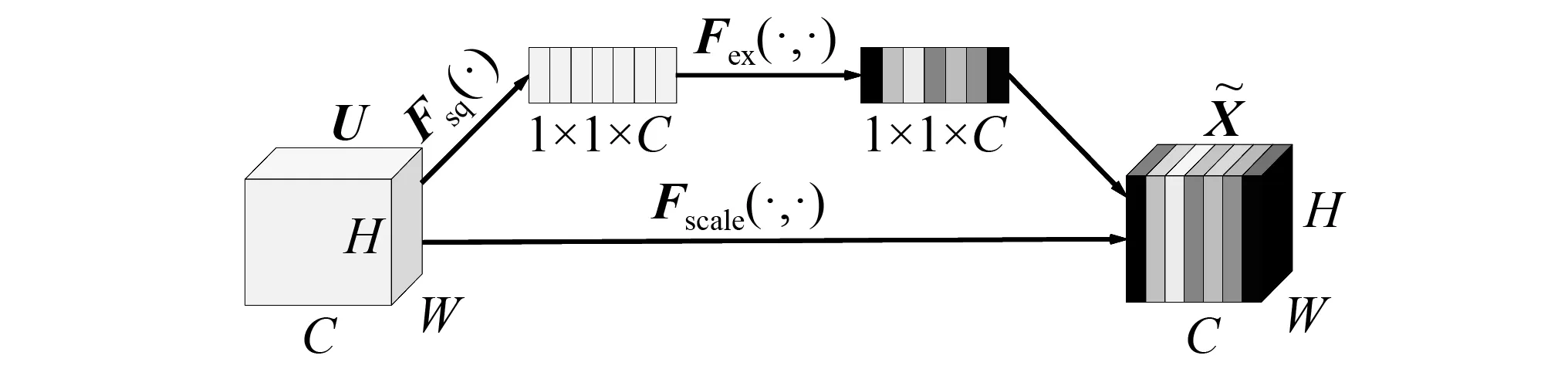
图2 通道注意力机制
(4)
式中:c为压缩的通道序号;zc为第c个通道压缩后的值;uc(i,j)是i×j维的二维矩阵,i=1,2,…,H,j=1,2,…,H。
然后,利用激活操作Fex(·,·)学习每个通道的特征权值。该步骤是SE模块建立通道特征与训练效果相互关系的关键一步,目的在于使学习到的权值能够激励重要的特征映射,抑制不重要的特征映射。具体操作是在压缩之后使用了两层全连接构成的门机制来学习不同通道的权值,门控单元计算方法为
sc=σ[W2δ(W1zc)]
(5)
式中:δ为Relu激活函数;σ为sigmoid激活函数;W1,W2分别为两个全连接层的网络参数;sc是激活操作后得到的门控单元。
最后,通过乘积操作Fscale(·,·)输出门控单元与输入特征图子图uc的向量积
(6)

通过在双连接残差网络的输出中加入SE注意力机制,构成双连接注意力残差模块(double-connected attention residual module,DARM),使模块获得对不同通道特征的重要性区分,提高特征学习的效率。
3 所提故障诊断方法
由于滚动轴承的实际运行环境复杂,数据的采集通常会受到强噪声等不利因素的影响,从而导致CNN在特征提取过程中具有一定局限性。为了充分利用采集的振动信号以及CNN强大的特征提取能力,本文提出了传感器信息融合与双连接注意力残差网络相结合的滚动轴承故障诊断方法。利用传感器信息融合策略可以收集更多的故障特征信息,同时,经注意力机制改进的双连接残差模块,能有效挖掘融合信号中更抽象的深层故障特征,并改善深层网络的梯度弥散与退化问题,有效实现网络在复杂工况环境下的故障分类。
3.1 传感器信息融合
数据处理是故障诊断中的关键一步,为了尽可能地消除该环节对专家知识的依赖,本文采用多传感器信息融合策略来提高模型输入中包含的特征信息量。
3.1.1 数据转换
试验采集的数据均为一维时序数据,而由于CNN特殊的网络结构,其在处理二维数据时更具有优势[14]。因此,本文采用按固定长度截取一维信号,并逐行填充到二维数据中的方法来实现数据转换。
(1) 归一化操作。将原始数据归一化到无量纲的同一范围,可以防止训练过程中的梯度消失,加快网络收敛速度。归一化操作具体方式为
(7)

(2) 数据格式转换。一维原始数据转换成二维格式的过程,如图3所示。将长度为1 024的原始信号,按照32个采样点为一段的方式进行截取,得到32个等长的片段。然后将截取的信号依次进行堆叠,最终得到一个3232的二维重构信号。
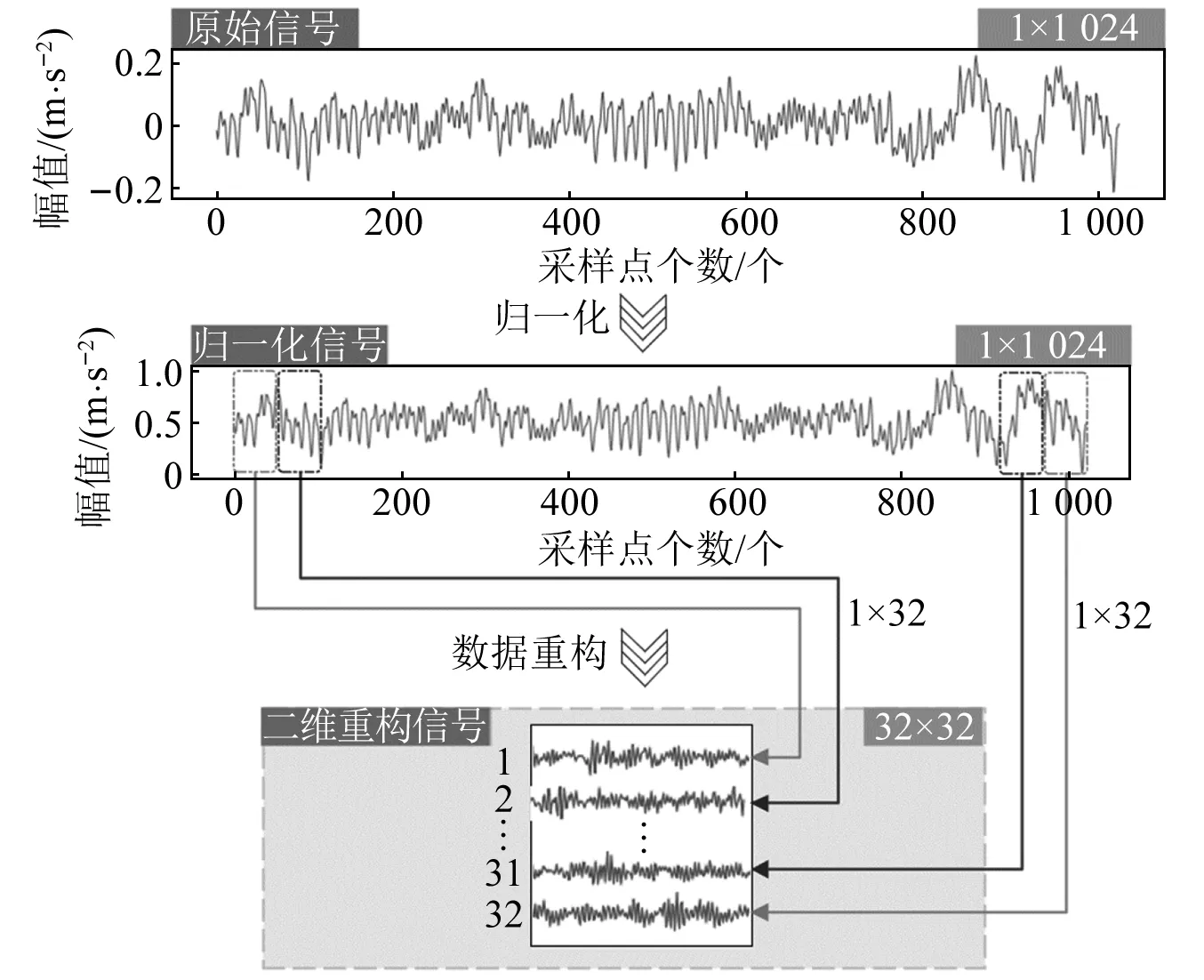
图3 数据重构示意图
3.1.2 多传感器数据融合
本文中的振动信号来自3个放置在不同位置的传感器,每个传感器收集到的信号按照上述转换方式得到数据格式为[32,32,1]的二维重构信号,其中1表示单通道。为有效利用来自不同传感器的信息,本文将同一时刻收集的信息转换成二维数据后,再由并联方式实现不同位置所收集信号的融合,形成多通道输入,从而增加模型输入包含的故障特征信息。融合后的输入数据格式为[32,32,3],其中3表示三通道。
3.2 模型结构
本文提出的传感器信息融合与双连接注意力残差模块相结合的轴承故障诊断模型结构,如图4所示。该方法对原始数据的处理不依靠专家经验和手工特征提取,只要将原始数据输入诊断模型,网络通过学习数据特征就能自动地输出诊断结果,实现了“端到端”的故障诊断流程。在图4中,经预处理后的多通道输入,首先经过两个宽核卷积神经网络,以提取故障信号中的浅层特征;然后将提取的特征输入由3个DARM堆叠组成的深层特征提取结构,利用注意力机制优化的双连接残差网络,逐层提取多通道输入的高级特征信息,并将得到的高级特征映射图输入GAP网络层,以减少网络训练参数、防止过拟合;最后,利用softmax层完成故障类别输出。
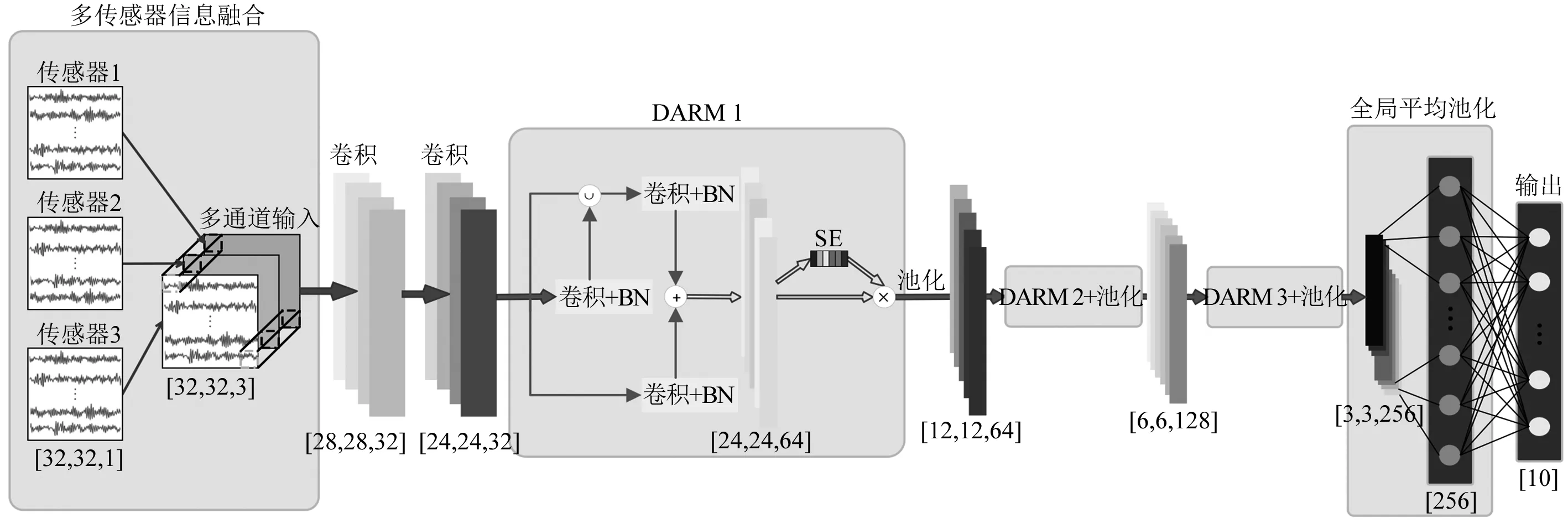
图4 所提诊断模型结构
3.3 诊断流程
本文提出的基于传感器信息融合及双连接注意力残差网络的诊断方法的应用流程如图5所示,主要分为训练和测试两个部分,具体如下:
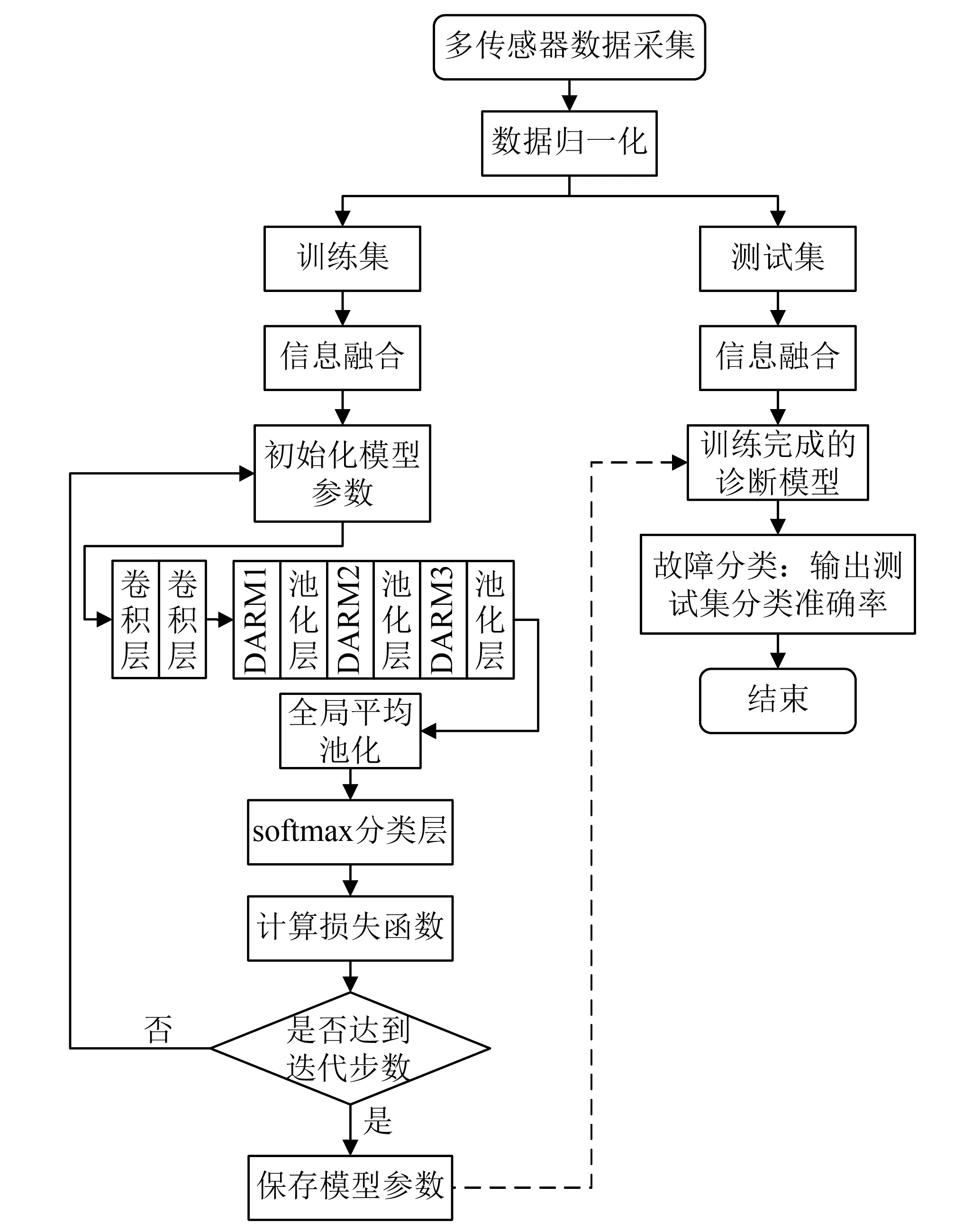
图5 诊断流程图
(1) 利用多个传感器收集不同位置的轴承振动信号,将其进行归一化,并分为训练集和测试集;
(2) 将训练集中的数据融合成多通道输入,然后利用搭建的诊断模型学习故障特征,并通过交叉熵损失函数计算模型训练过程中的损失值;
(3) 根据得到的损失值,利用误差反向传播算法对整个网络的权重参数进行更新,降低损失函数值,提高诊断精度,直至达到网络设置的最大更新次数;
(4) 利用测试集测试训练完成的诊断模型,输出分类结果。
4 试验验证
为了验证所提方法有效性,本文以凯斯西储大学(CWRU)与安徽工业大学自制试验平台采集的轴承数据集为试验对象,分别进行试验验证。
4.1 所提方法与对比方法结构参数
所提方法模型在Inter i7-10750H处理器、8 GB运行内存、GTX 1650TI 显卡的Windows10电脑环境下,使用Python语言在Pycharm平台中编写,利用pytorch深度学习框架实现。
本文所提方法利用两层宽核卷积来提取大局域的浅层特征,但考虑到深层网络模型更有利于特征学习以及由此带来的梯度消失问题,因此在设计DARM时采用大小为33的卷积核,因为较小的卷积核在相同感受野下能提升网络深度[15],同时小尺寸的卷积核会增加网络内部非线性,使网络更具鉴别力,从而改善模型效果。此外,网络中每增加一个DARM,输出的特征图数目就会增加一倍,为了减轻网络训练的参数,在每个DARM后添加了一个池化层。最后,为避免训练过程中出现过拟合,加入全局平均池化层以进一步减少网络参数。所提方法具体参数如表1所示。
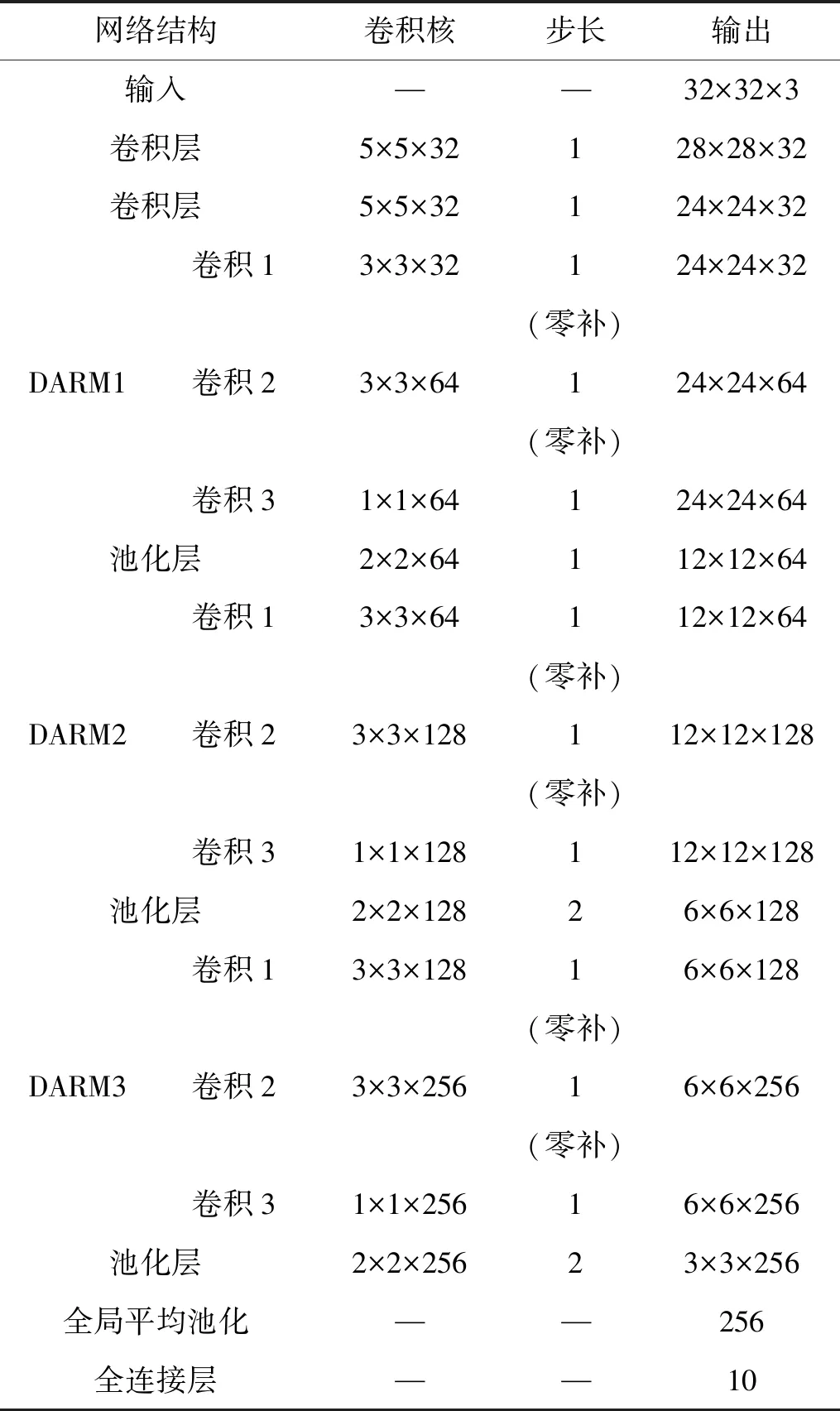
表1 所提模型结构参数
所提方法的模型输入为多通道的融合信号,其中:32×32×3中的3表示通道数,32×32表示特征图的大小;卷积层的参数5×5×32,表示在卷积过程中的核尺寸为5×5,数目为32个;步长中的零补表示在卷积过程中将参数padding的值设置为1,以保证卷积后的输出尺寸与输入相同。
本文提出的基于传感器信息融合及双连接注意力残差网络的故障诊断方法,增加了输入信号中故障特征的数量,改善了模型的特征学习效果,从而提高了故障诊断精度。为了能从多方面对本文所提模型在复杂工况环境下的诊断效果进行评价,将其与宽核卷积神经网络(deep convolutional neural networks with wide first-layer kernel,WDCNN)、普通残差网络(Resnet)、双连接残差网络(double-connected residual network,DRN)以及采用本文所提诊断模型的单传感器输入方法(single sensor input and double-connected attention residual network,SSI-DARN)进行比较。所选对比模型的参数如表2所示。
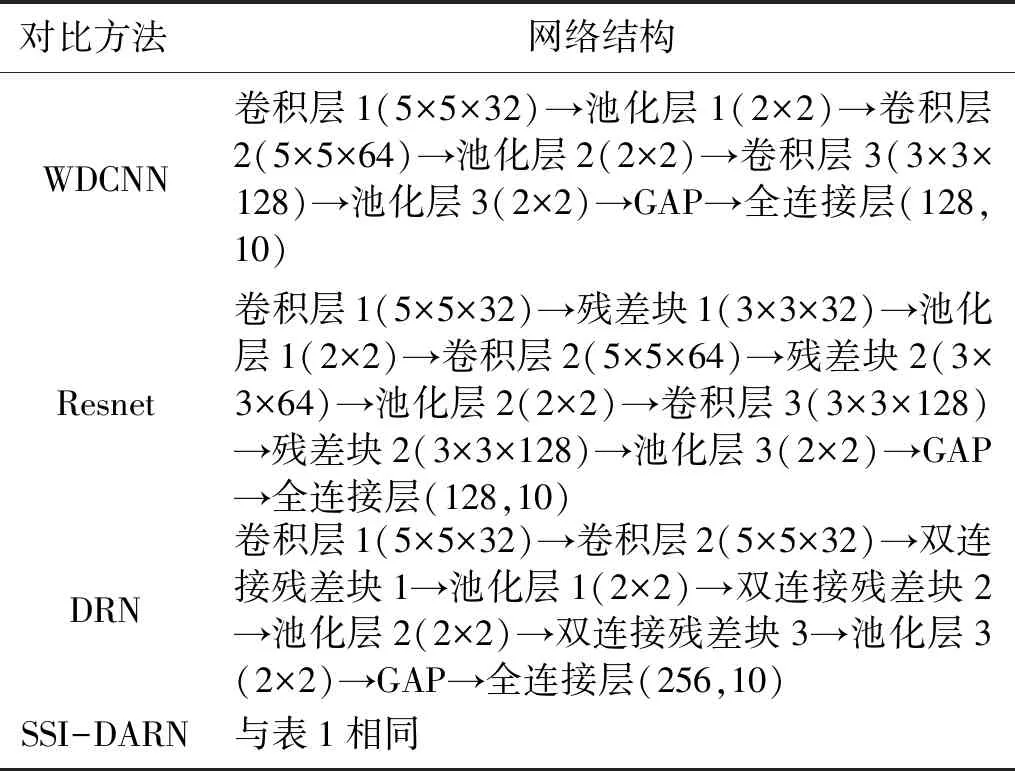
表2 对比模型结构参数
4.2 CWRU轴承数据集
CWRU的轴承数据集是利用电火花向测试轴承的内圈、滚动体和外圈引入单点故障,故障尺寸分别为0.177 8 mm,0.355 6 mm和0.533 4 mm。因此,轴承的故障状态可分为9种,加上正常状态就产生了10种不同的轴承运行状态。对采集到的数据以1 024为一个样本长度进行无重叠采样,其中80%作为训练集,20%作为测试集,得到的试验数据描述如表3所示。
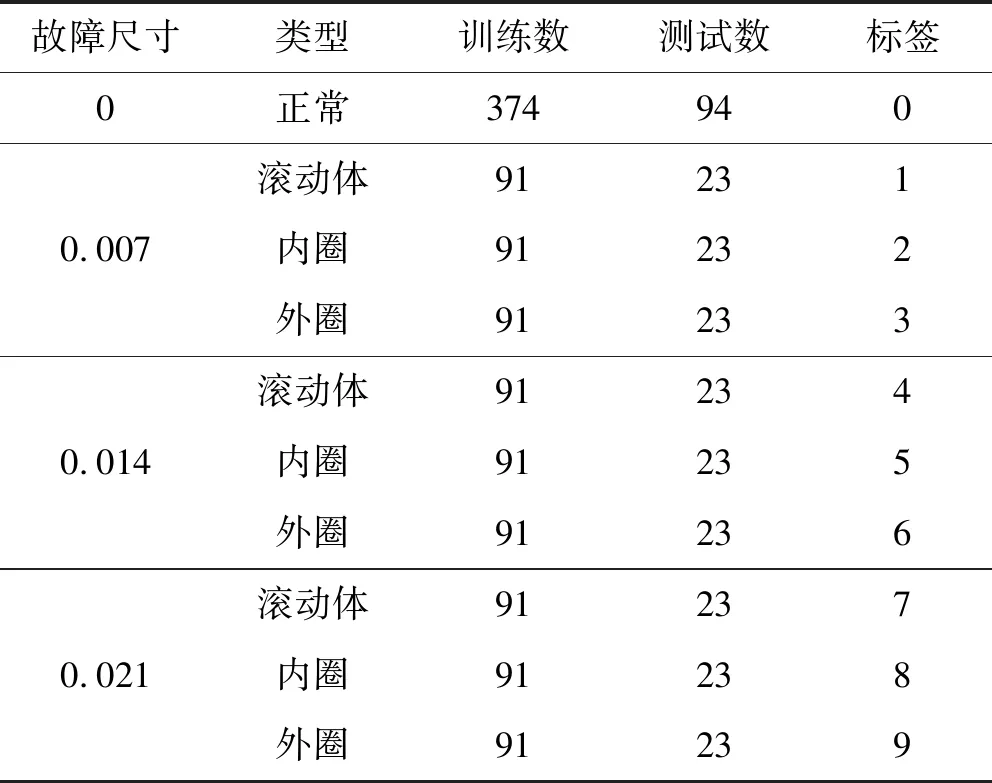
表3 CWRU数据描述
实验中数据采集频率为12 kHz,分别在负载为0,1 kW,2 kW,对应转速为1 797 r/min,1 772 r/min,1750 r/min的状态下,对风扇端、基座端和驱动端进行振动信号收集。由于故障轴承的振动信号在不同位置可以体现出同一故障类型的不同故障特征,因此当振动信号采集的位置不同时,能收集到的轴承故障特性也不相同,因此可以为故障诊断模型提供更丰富、全面的数据输入。为了验证所提方法在复杂工况条件下的有效性,创建了A,B,C,3个数据集,如表4所示。
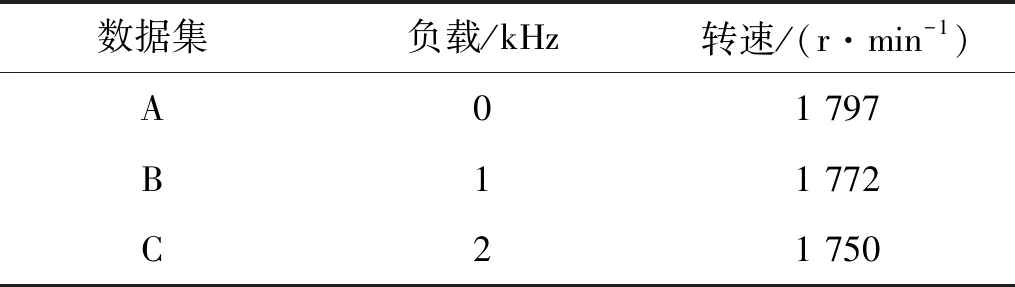
表4 实验数据集描述
为了使采集的数据尽可能接近实际工况环境下采集到的样本,本文在测试数据中加入不同信噪比(signal noise radio, SNR)的高斯白噪声,以模拟在实际工作环境中采集到的含有噪声的样本。计算SNR的方式如下
(8)
式中:RSN为噪声强弱;Ps为信号功率;Pn为噪声功率。
4.2.1 网络主要参数选择
网络参数设置影响到模型对数据的学习效果以及最终的试验结果,因此选择合适的参数会对整个故障诊断流程有重要影响。研究中发现诊断网络的深度以及训练过程中采用的批处理数目,对故障判别的准确率有较大影响,因此本文通过试验来确定两者合理的参数。为减少随机因素的影响,本文中的试验采用恒定负载下的数据集C进行训练和测试,测试过程中为了模拟实际环境下采集的信号,在测试集中添加了SNR=2的高斯白噪声。
(1) 网络深度
在CNN构成的诊断网络中,不同的网络深度对于诊断结果的精度以及训练过程的难易程度有直接影响。为了选择合适的诊断网络结构,本文构建了4种不同深度的诊断模型,分别包含DARM的数目为1,2,3,4,以下简称DARM1,DARM2,DARM3、DARM4。上述4种模型均在相同条件下进行10次试验,结果如图6所示。
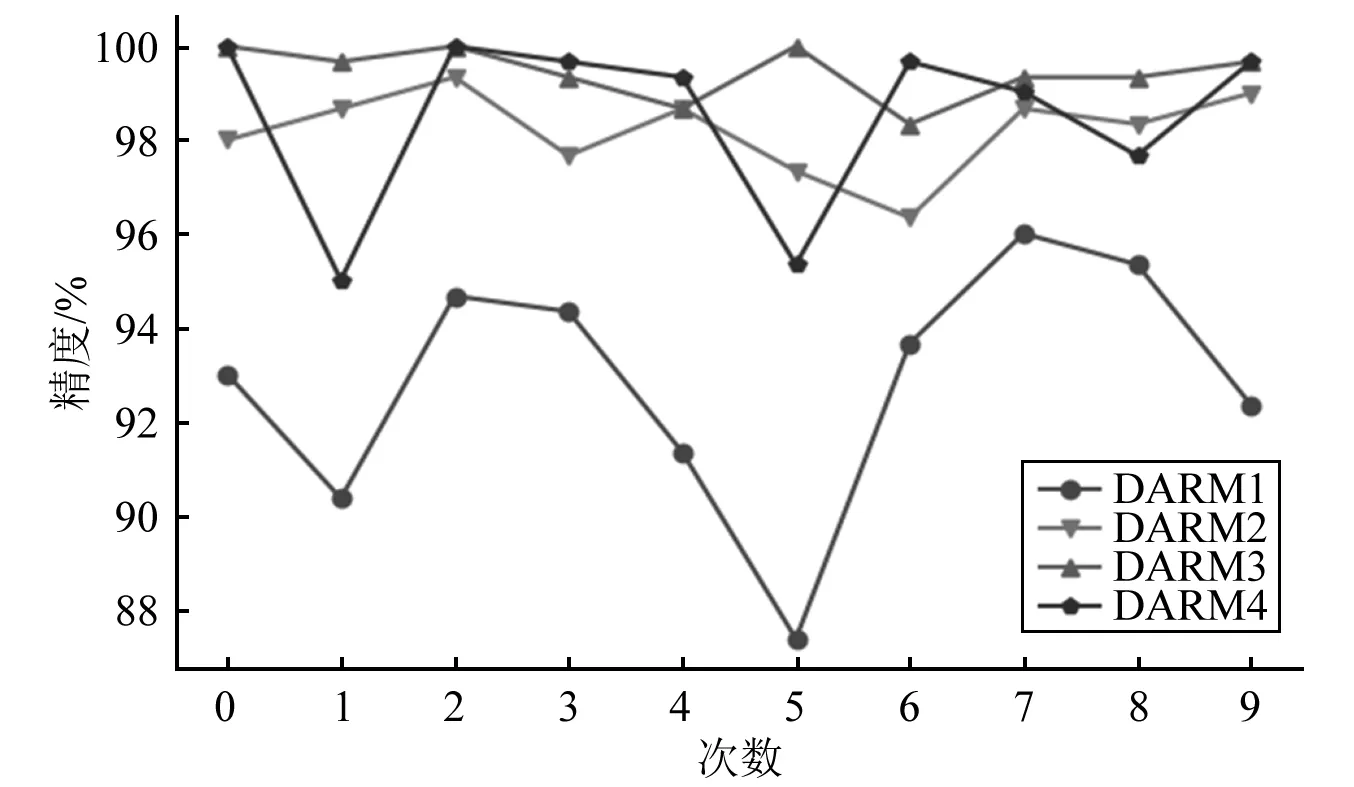
图6 不同深度网络诊断精度
由图6可知,相比于更深层次的网络,只包含一个DARM的网络结构的故障识别准确率明显较低,因此网络结构的深度对于故障诊断结果有明显影响。当网络深度逐渐加深时,由图6可知,DARM3的精度总体上好于DARM2,但DARM4相比于DARM3却在结果上有较大波动,且总体结果并不优于DARM3,因此当网络深度增加到一定程度时,若继续加深网络结构,诊断结果并不会继续得到优化,反而出现了较大的波动。综上,本文选择DARM3作为诊断模型的网络深度。
(2) 批处理数目
在深度学习的训练过程中,采用小批量梯度下降算法可以加快模型的收敛速度,同时能避免训练过程陷入局部最优。然而批量值过小会使模型参数更新缓慢,训练时间过长;批量值过大则会使梯度更新朝全局最优方向更新缓慢。因此为模型确定合适的批处理数值对诊断结果有重要影响。在确定DARM3为所提方法的网络深度基础上,本文分别对批量大小为16,32,64,128的批处理数目进行试验,相同条件下运行10次的结果如图7所示。由图7可知当批量大小为64时的诊断精度明显高于其他对比试验,且诊断结果的稳定性最好,因此本文选取64为模型训练时的批量值。
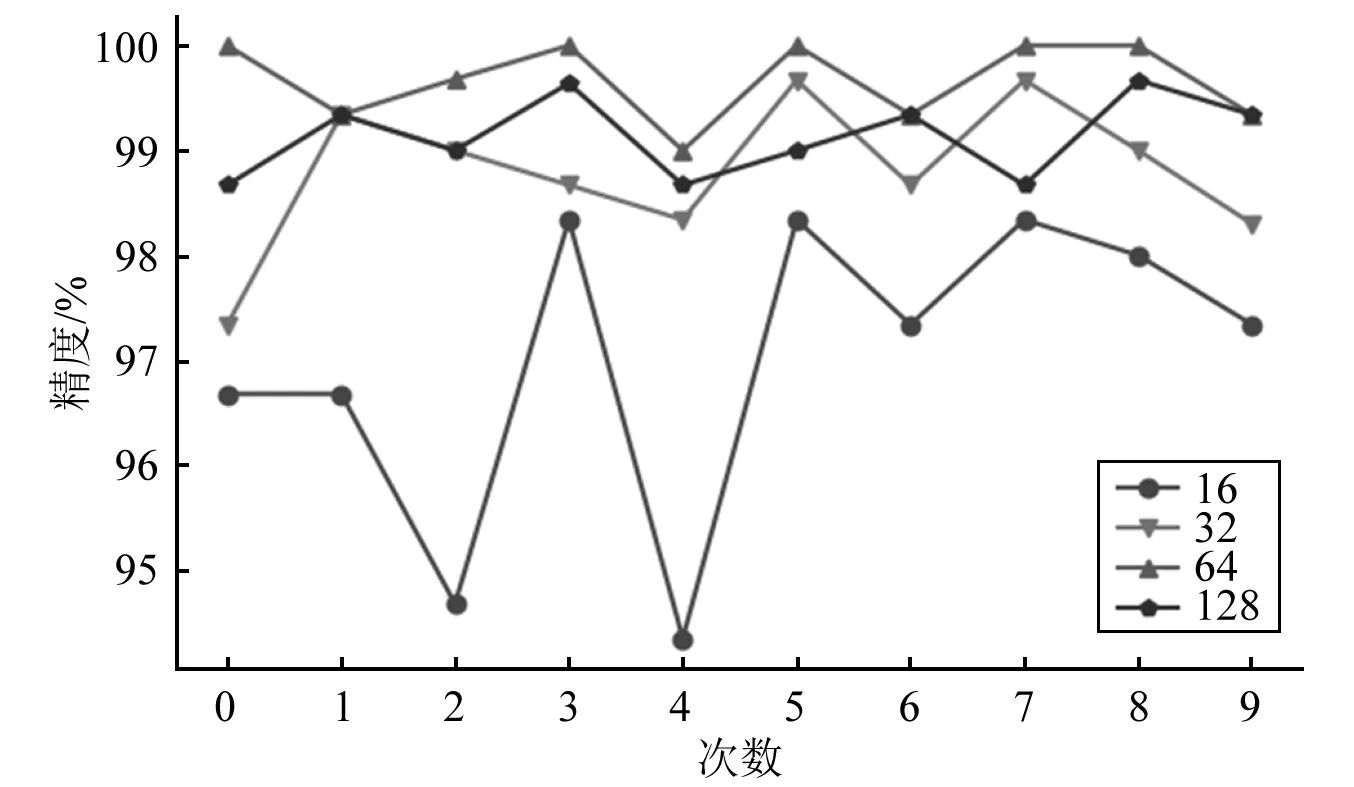
图7 不同批量处理数目诊断精度
4.2.2 变负载试验分析
滚动轴承通常运行在变负载环境中,因此需要故障诊断方法具有良好的泛化能力,以解决负载变化时的故障判别。为了验证所提方法在负载变化时的实际诊断效果,本文以某一恒定负载的数据集作为训练集,不同负载的数据集作为测试集,以此模拟负载变化。例如,A-B表示在数据集A上进行训练,采用数据集B来测试。每组试验进行10次,取其平均值作为实验结果。最终在负载变化条件下,得到不同方法的诊断结果,如图8所示。
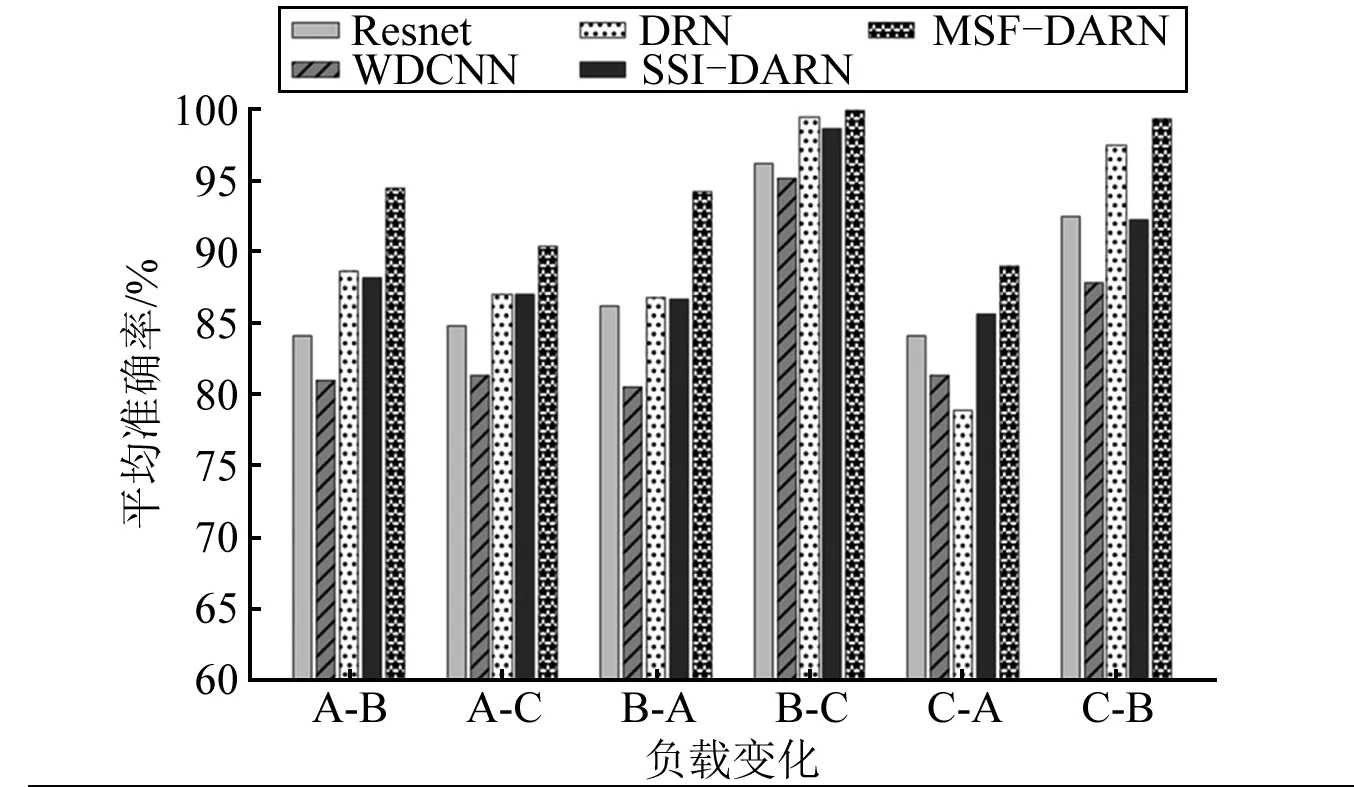
图8 变负载诊断精度结果
由图8可知,WDCNN在负载变化下的诊断精度最低,平均诊断精度仅为84.5%,本文所提方法在每种负载变化下的诊断精度均高于对比方法,平均诊断精度在94%以上。其次,对于Resnet与DRN,两者保持了相似的网络结构,主要区别在于残差模块的不同,但相比采用普通残差模块的双连接残差网络,后者的平均诊断精度为90.2%,优于前者的87.9%,验证了所设计的双连接残差网络相比普通残差结构更有利于挖掘隐层特征信息。同时,所提方法的识别准确率均高于DRN,表明经注意力机制改进的双连接残差网络可以获得不同通道特征重要性,挖掘出更具有鉴别性的故障特征。此外,对于以单传感器信号作为模型输入的SSI-DARN,虽然在诊断模型上采用了本文方法,但是在变负载条件下的平均诊断精度为89.7%,明显低于多传感器信息融合的方法,表明传感器信息融合策略可以使输入信号包含更多的特征信息。
4.2.3 抗噪性试验分析
为了验证所提方法在复杂工况条件的抗噪性能,在数据集B的测试集中加入0~8 dB的高斯白噪声,用来测试不同方法抗噪能力。每组试验进行5次,试验结果的均值对比如图9所示。
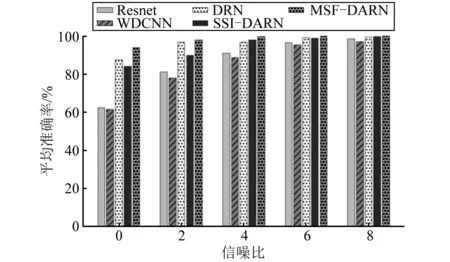
图9 噪声变化诊断精度结果
由图9可知,当噪声强度为0~8 dB时所提方法的诊断精度高于其他诊断模型,其平均识别准确率超过了98%。总体而言,不同诊断模型的识别准确率与噪声强弱均成正向变化关系,且当SNR超过6 dB时,各模型的诊断精度趋于稳定,这是由于在噪声较小情形下,识别精度主要取决于模型自身在特征提取上的设计。此外,当SNR从0~8 dB变化时,只有本文的诊断模型能始终保持在93%以上的诊断精度,说明所提方法在噪声环境下仍具有较强的故障特征提取能力。
4.3 安徽工业大学自制轴承数据集
为了进一步验证所提方法的有效性,本文选用如图10所示的自制试验平台采集的数据[16]进行试验。试验轴承型号为SKF6206-2RS1,采用电火花分别对轴承的内圈、外圈和滚动体加工出不同的故障尺寸。通过放置在不同位置的加速度传感器对转速为900 r/min,1 200 r/min和1 500 r/min 3种工况,进行轴承振动信号的数据采集,采样频率为10.24 kHz,分别得到数据集A,B,C。对采集到的振动信号,按每个样本长度1 024进行无重合切分,其中80%作为训练集,20%作为测试集,每个数据集的构成如表5所示。
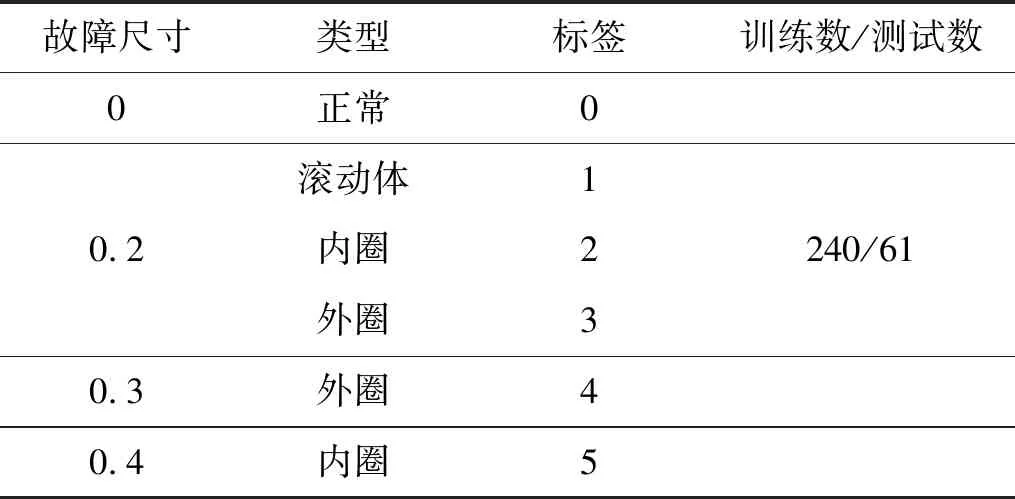
表5 安徽工业大学数据描述
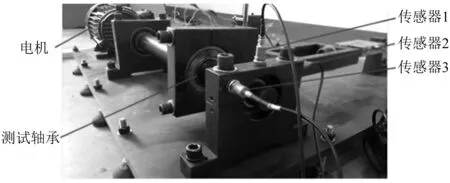
图10 安徽工业大学自制试验平台
4.3.1 噪声环境下的变转速试验分析
考虑到轴承工作时的转速变换以及噪声环境的干扰,本文设计了带有噪声变化的变转速试验。该试验具体过程为将诊断模型在一个转速下收集的数据进行训练,然后利用另一个转速下采集的数据来测试训练完成的模型。例如,A-B为在数据集A中进行训练,训练完成的模型在数据集B中进行测试。同时,为了测试诊断模型在变工况下的抗噪性能,在测试数据集中分别加入不同SNR的高斯白噪声。试验采用的诊断模型结构与表1相同,将在CWRU数据集中采用的SSI-DARN,DRN以及WDCNN作为对比方法。
为了避免试验过程中的随机性,对每一个噪声环境下的工况变化重复进行5次试验,然后取其平均值。试验结果如图11所示。图11中0,2,4,6表示在测试集中加入高斯白噪声的信噪比。由图11可知,转速变化相同条件下,本文所提方法在SNR为0~6 dB的噪声环境中,故障类型识别的平均准确率均高于其他方法。同时在相同SNR的噪声环境下,所提方法在转速变化时的识别平均准确率也高于对比方法。特别在SNR=0的高噪声环境下,相比于SSI-DARN和DRN,所提方法的识别准确率都高于90%,进一步说明了本文构建的诊断方法在不依赖人工提取特征情形下拥有较强的特征学习能力。此外,测试轴承在SNR为0~6 dB、转速改变条件下,本文模型的平均准确率可达96.46%,表明所提方法在复杂工况条件下具有良好的故障识别准确率和抗干扰性能。
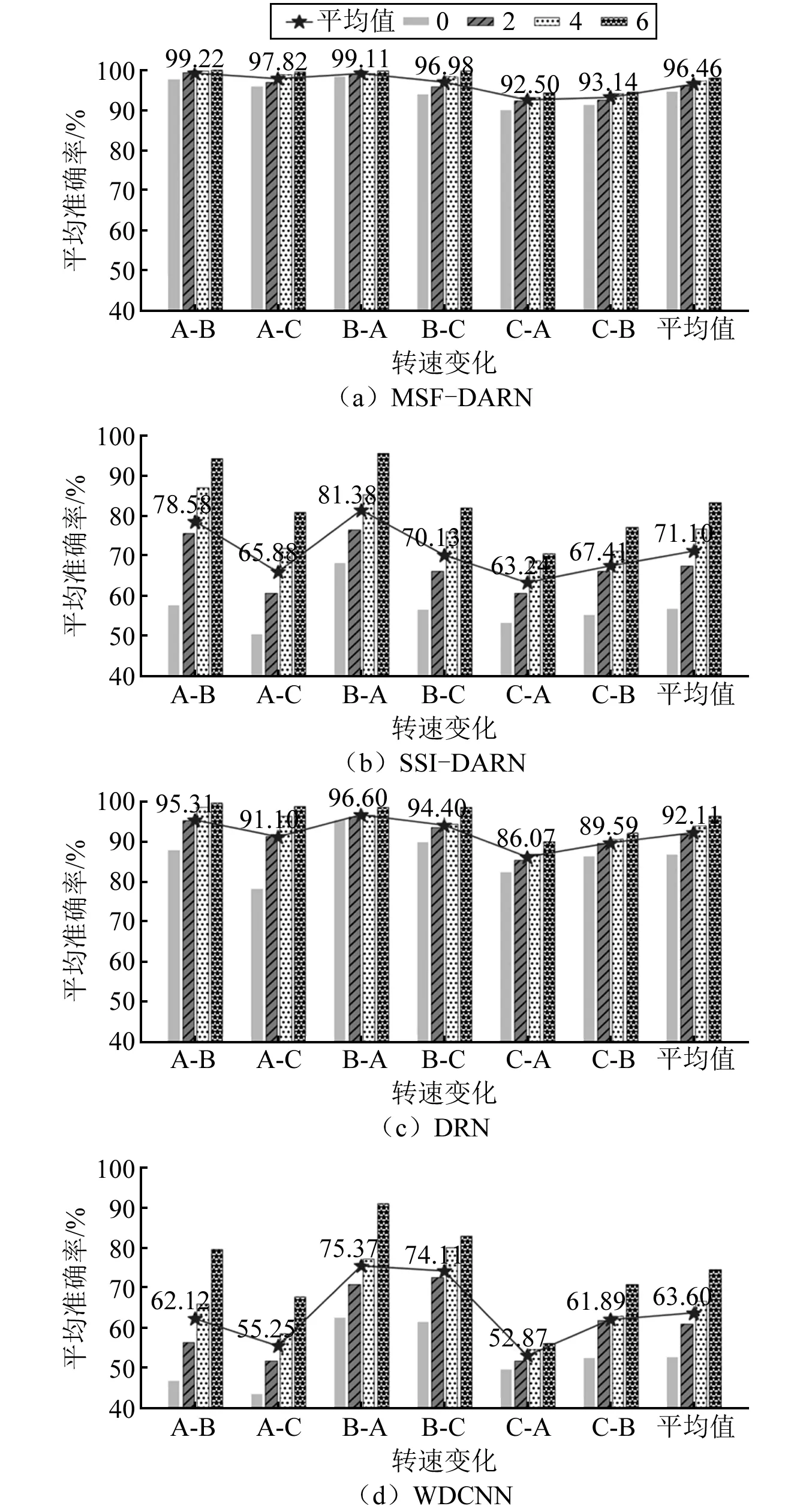
图11 有噪声变化的变转速试验诊断精度
4.3.2 所提方法诊断过程可视化
为了直观地展示所提方法的诊断过程,本文采用t-SNE(t-distributed stochastic neighbor embedding)降维算法,分别将输入的振动信号、双层宽核卷积层的输出、模型中3个DARM的输出以及全连接网络最后一层输出中的高维特征降到二维,从而实现诊断方法的特征提取可视化。试验中采用的训练集为A,然后利用添加了噪声强度SNR为0的测试集B来得出训练完成的诊断模型在特征提取不同阶段的可视化结果,如图12所示。
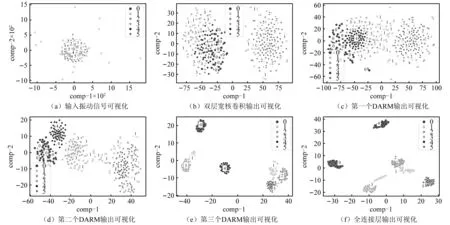
图12 诊断过程降维可视化
由图12可知,诊断模型对于不同故障类型特征的可分性随着网络的加深逐渐增强。特别是,经过3个DARM模块的学习后,模型对于故障类型的区分能力明显增强,说明本文采用的DARM有良好的特征提取能力,能够从振动信号中提取出能反映轴承运行状态的故障特征。同时,由处于不同深度的DARM输出的高维特征可视化结果可知,本文在诊断模型中所采用的3个DARM模块堆叠而成的深层网络,更有利于模型对不同类别故障的区分。此外,由整个诊断流程的可视化结果看出,通过数据集A训练完成的模型,在SNR为0的噪声环境中使用数据集B进行测试时,仍能清晰地得出不同类型故障之间的界限,进一步说明了所提方法在有噪声干扰的变工况环境下有较好的识别性能。
5 结 论
考虑复杂工况条件下变负载、变转速以及环境噪声干扰等影响因素,本文提出了传感器信息融合与双连接注意力残差网络相结合的轴承故障诊断方法。该方法在两个不同的数据集中表现良好,主要结论如下:
(1) 本文采用的传感器信息融合策略,简化了数据处理过程,提高了输入数据中包含的故障特征信息。
(2) 由DARM堆叠而成的深层网络,可以有效挖掘融合信号中包含的深层特征信息,且利用DARM的SE机制可以使模型学习到更具有判别性的故障特征,从而提升模型在复杂环境下的识别性能。
(3) 针对两个不同的试验数据集,所提方法在不同工况环境下均取得了较高的故障识别准确率。特别是在有噪声变化的变转速试验中,所提方法的平均诊断精度可达96.46%,表明本文方法在变工况复杂运行条件下具有较好的诊断性能。
