基于广义能量法的充气式快速部署无人机翼载荷设计分析
2023-10-30廖俊陈铮王宁罗世彬凌霖雨李珺
廖俊,陈铮,王宁,罗世彬,凌霖雨,李珺
(1.中南大学 航空航天技术研究院,湖南 长沙,410083;2.63892部队,河南 洛阳,471003)
快速部署长航时飞行器通过箭载发射或机载投放等方式来完成高空环境下的快速部署,实现对突发灾难区域及军事领域的应急通信、观测及监控等[1]。箭载发射或机载投放等方式对飞行器体积的限制较严格,快速部署飞行器需具备可折叠的特性[2-3]。目前,可折叠飞行器主要可分为刚性可折叠无人机、智能材料可折叠无人机和柔性可折叠无人机[4-5]。一种新型充气式飞行器的机翼、机身和尾翼等部分或全部使用充气式结构代替,实现刚性可折叠无人机与柔性可折叠无人机的有机结合,并融合动升力与静浮力。随着材料、加工工艺、控制技术的不断进步,这日渐成为研究和开发的热点[6-7]。采用充气机翼与刚性可折叠尾翼结合的结构,在充气机翼上铺装柔性光伏电池,形成一种可折叠的充气式太阳能飞行器的总体布局形式,该充气式飞行器不仅能够实现高空长航时驻空,而且能较理想地解决充气式无人机存在能源系统质量大、飞行时间短等缺点[8],在监测、通信领域有着广阔的应用前景。
常规太阳能飞行器设计只考虑巡航状态下的单点设计,飞行任务较单一,飞行器的机动性以及爬升率较传统飞行器的设计存在较大差别,加之能源方面采用光伏电池与储能电池结合的方式,导致常规飞行器的设计方法不适用于太阳能飞行器的设计[9]。因此,研究太阳能飞行器设计方法一直备受众多学者关注。杨穆清等[10]根据能量平衡原理,建立了各子系统的数学模型,研究了不同参数在总体设计过程中的影响,提出了适合升浮一体太阳能飞行器的总体参数设计方法。朱雄峰[11]基于全天和夜晚能量平衡,针对太阳能飞行器翼载荷可行域,研究了飞行器各参数影响,验证了翼载荷边界模型的可行性。为完成充气式太阳能飞行器的总体设计,需进一步考虑能源平衡、推阻平衡和浮重平衡等要求,研究充气式太阳能飞行器的翼载荷可行域。马东立等[12]针对太阳能飞机,研究了储能电池能量密度、推进系统功重比等相关参数对太阳能飞机飞行轨迹的影响,得到了适用于变高度太阳能飞机总体参数设计方法。杨宇丹等[13]根据太阳能无人机工作原理,建立了能源系统及参数敏度分析模型,研究了太阳能飞行器功率因子、储能电池能量密度、太阳能电池转化效率等参数对能源系统及整体设计的影响。上述研究未能充分考虑充气式太阳能飞行器在结构和控制上存在的差异,难以分析飞行器总体参数的敏感度及参数间的耦合关系。
本文针对充气式太阳能飞行器翼载荷可行域,首先,根据能量平衡及最小质量原则,建立充气式太阳能飞行器能源动力模型、全天及夜晚能量平衡下的翼载荷边界模型;其次,研究飞行器相关参数对其翼载荷可行域的影响,分析各参数间的耦合关系;最后,对比常规、充气式太阳能飞行器翼载荷可行域进行。
1 理论模型
1.1 能源动力系统模型
太阳能辐射能量为充气式太阳能飞行器最主要的能源来源,飞行器通过光伏电池将太阳能转化为电能,通过合理的能源管理系统(如图1所示),在满足太阳能飞行器正常飞行和有效载荷工作的前提下,将电能储存在储能电池中,以供飞行器晚上飞行能量需要,实现真正意义上的长航时飞行[14]。
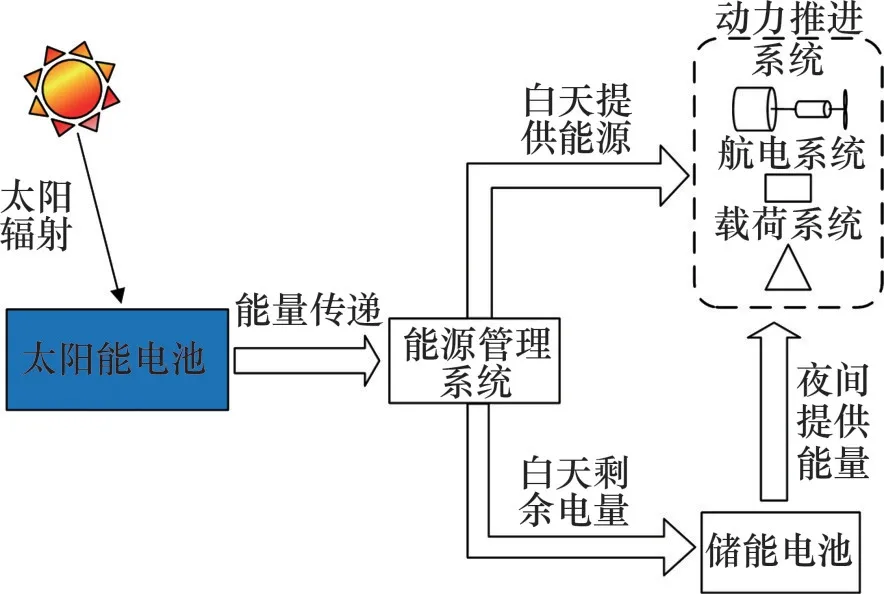
图1 能源系统组成Fig.1 Composition of energy system
太阳辐射强度受地理位置、飞行姿态、天气条件和反照率等多种变量影响,1 d 中任意时刻,太阳垂直照射强度I0[15]为:
式中:I为太阳常数,取1 367 W/m2,指在日地平均距离条件下,地球大气上界垂直于太阳光线的面上所接受的太阳辐射通量密度;ε为地心偏心率,取0.017;n为时间,规定每年中1月1日为第1天。
无人机在高空飞行过程中,其太阳辐射分析模型如图2所示。图2 中,nw为机翼平面法线方向,机翼偏转角α为nw与天顶方向Z的夹角,ψ为nw与太阳方向之间的夹角,β为太阳高度角,γ为太阳方位角。
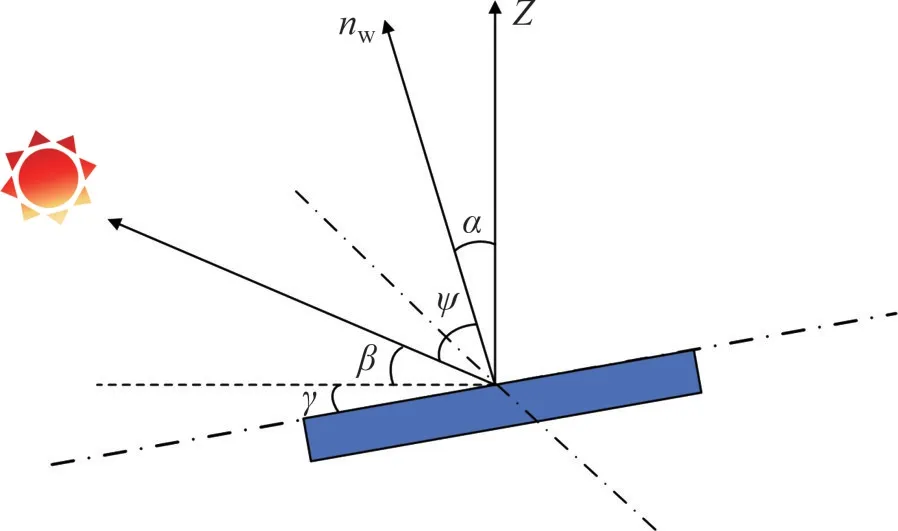
图2 太阳辐射模型Fig.2 Model of solar radiation
由文献[7]和图2中几何关系可知:
式中:θ为充气式太阳能飞行器所在地理纬度;φ为充气式太阳能飞行器所在太阳赤纬角;w(t)为太阳时角,随时刻t不断变化。
由式(1)~(6)可得到机翼在任意时刻的太阳辐射强度,结合文献[16]可知,1 d 内充气式太阳能飞行器所能获得的太阳能能量Eacq为
式中:ηssc和ηsc分别为光伏电池铺装率和光伏电池转化效率;ηmppt为最大功率追踪模块的追踪效率;ηe为电动机效率;ηpr为螺旋桨效率;ηb为储能电池放电效率;S为机翼参考面积;Psolar为单位面积太阳辐射;Pacq为无人机所获得的太阳能辐射功率。
式中:tday、tdaytime和tnight为全天(24 h)、白天、夜晚时间。由于目前常用的储能电池多为锂电池,其放电效率较高,为简化计算,文中储能电池放电效率取1[17]。
将式(9)代入式(8)可得,太阳能飞行器所能获得的太阳能辐射功率为
充气式太阳能飞行器要实现长航时的不间断飞行,应满足推阻平衡、浮重平衡和能量平衡[18-20]。
式中:W为飞行器所受重力;CL和CD分别为升力系数和阻力系数;ρ为飞行器所在飞行高度的大气密度,主要与飞行高度有关;v为飞行器巡航速度;Fg为充气机翼所能产生的浮力;V为充气机翼体积;g为重力加速度;T为飞行器推力。
由式(11)和(12)可知,太阳能无人机的巡航速度如下:
结合式(13),有充气式太阳能无人机平飞巡航功率Ple为
充气式太阳能无人机维持飞行所需要的功率Pneed为
式中:Pa为无人机航电系统功率;Ppl为太阳能无人机所装备的有效载荷功率。
无人机航电系统功率和有效载荷功率远小于其平飞功率,有Pa=ηaPle、Ppl=ηplPle,其中,ηa为航电系统功率比例系数,取0.01;ηpl为有效载荷功率比例系数,取0.05[21]。
充气式太阳能无人机维持飞行所需要的能量为
1.2 飞行器翼载荷边界模型
1.2.1 全天能量闭环下的翼载荷边界
由文献[22]可知,在全天能量闭环下,充气式太阳能无人机要实现长航时飞行,必须满足式(14)能量平衡方程,太阳能无人机全天飞行所需要的能量必须小于等于其所能获取的能量。对式(10)和(17)进行变换得
即Pacq≤Pneed,对不等式两侧同时除去机翼参考面积S,可得
结合式(10)、(16)和式(17),可得
对式(21)进行简化,可得全天能量闭环下翼载荷边界方程为
由式(22)可知,全天能量闭环下的翼载荷边界主要与日均太阳辐射强度、设备能量转化效率、无人机所在飞行高度的大气密度、功率因子、机翼截面面积及弦长有关。日均太阳辐射强度、各设备能量转化效率、功率因子对该全天能量闭环下的翼载荷边界方程有2/3阶敏感度,机翼截面面积及弦长有1阶敏感度。
1.2.2 夜晚能量平衡下的翼载荷边界
由文献[23]可知,在夜晚能量平衡下,因夜间飞行太阳能无人机能量仅依靠储能电池供给,故有
式中:mb为储能电池的质量;ρb为储能电池的能量密度。
将式(16)和(17)代入式(23)可得
通过式(24)可以得到太阳能无人机储能电池最小质量,忽略充气机翼内部所充气体的质量,故有太阳能无人机总质量及各系统质量如下:
式中:mw为充气式太阳能无人机机翼质量;ρw为充气机翼蒙皮面密度;ρsc为光伏电池面密度;msc为光伏电池质量;mmppt为最大功率追踪模块质量;kmppt为最大功率追踪模块的质量功率系数;mpr为推进系统质量;kpr为推进系统质量功率系数;ma为航电系统质量;ka为航电系统质量功率系数;mpl为有效载荷质量;kpl为有效载荷系统质量功率系数。上述参数取值见文献[24]。
将式(24)代入式(25),可得太阳能无人机总质量为:
结合式(16),上式可以改写为
其中:
式(27)即为夜晚能量平衡下的充气式太阳能无人机有关翼载荷边界控制方程,通过分析该不等式,假定x=[(W-Fg)/S]1/2,即无人机翼载荷W/S=x2+Fg,则不等式方程可以改写为
该多项式函数图像如图3所示,图中阴影部分即对应无人机飞行可行域,当且仅当B-4/(27A2)≤0,即A2B≤4/27时,阴影区域才存在,即上述不等式小于等于0。其中,2 个正根x2和x3是无人机设计域的上下边界,故无人机翼载荷可以通过求解Ax3-x2+B=0间接求得。将A、B的具体值代入得
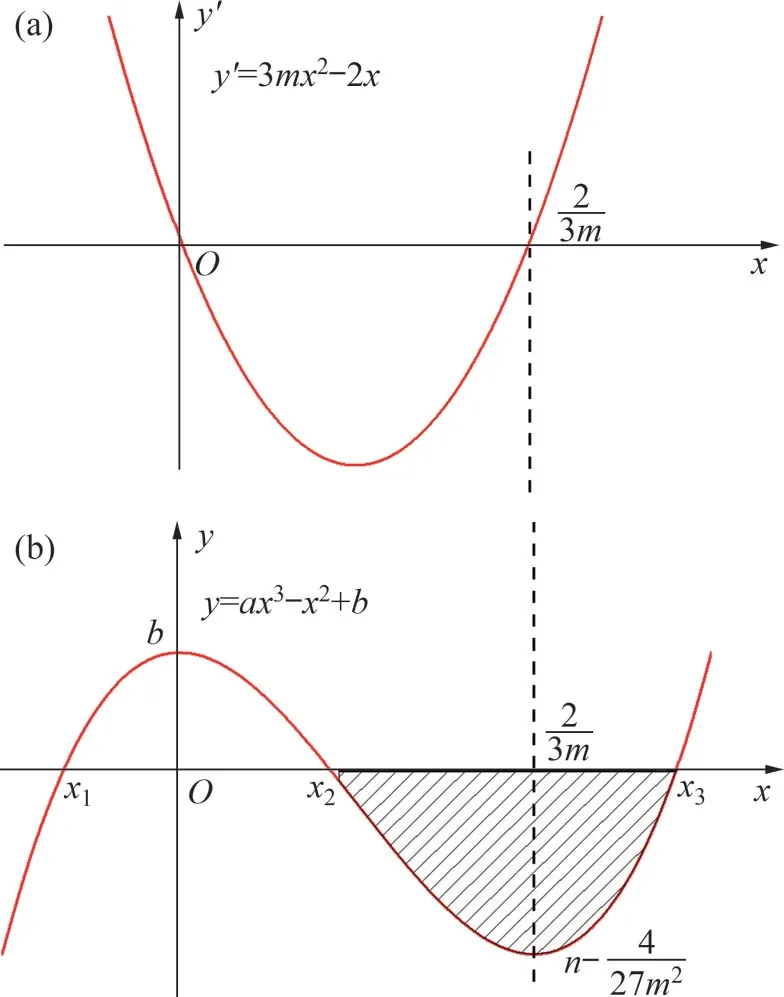
图3 多项式函数图像Fig.3 Polynomial function image
充气式太阳能无人机要实现长航时飞行,不仅要满足全天的能量闭环要求,而且要满足夜晚的能量闭环要求,即无人机翼载荷需要同时满足式(22)和(27),即有全天能量闭环下的翼载荷和夜晚能量平衡下的翼载荷相等时,所对应的飞行高度为无人机的最大飞行高度,该飞行高度对应的翼载荷如下:
2 算例分析
2.1 计算实例
由所建立的模型,根据太阳能无人机相关参数,利用数值分析软件对能源动力系统进行数值仿真,得到仿真地点的日均辐射强度、日光照时间等相关参数。以此为基础,编写太阳能无人机翼载荷边界的数值仿真程序,分析常规、充气式太阳能无人机的翼载荷设计域。程序仿真结构如图4所示。仿真地点定为长沙(北纬28°12′、东经112°59′),不同类型太阳能无人机相关参数如表1所示。
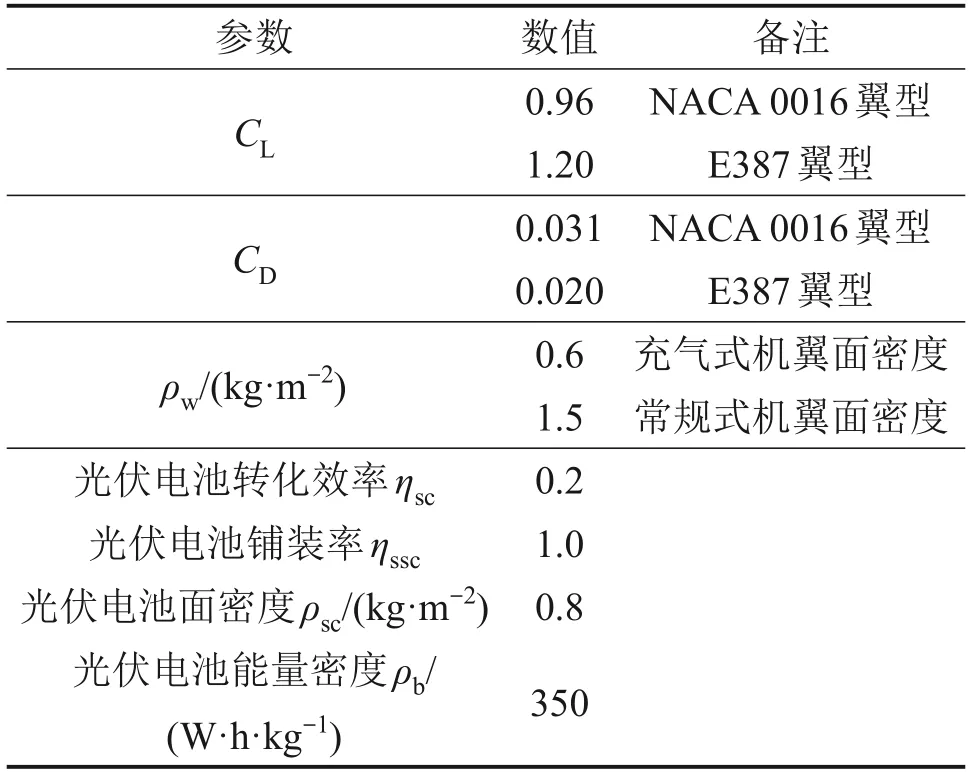
表1 不同类型太阳能无人机相关参数Table 1 Relevant parameters of different solar powered UAVs
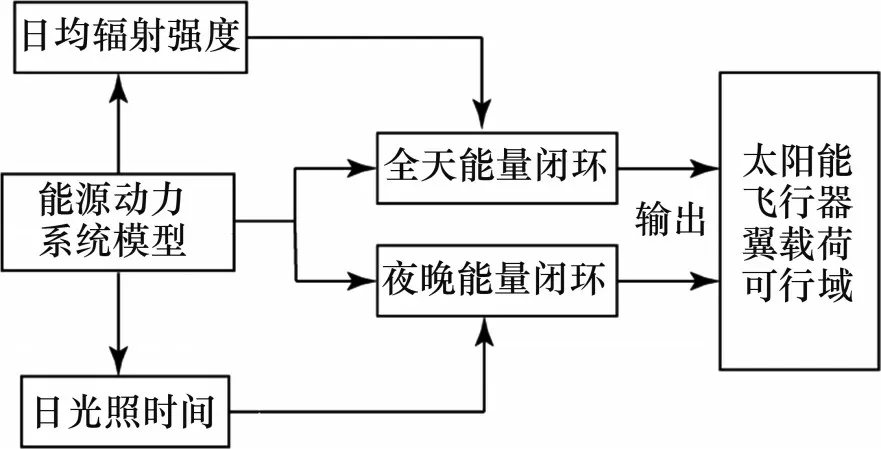
图4 仿真结构图Fig.4 Simulation structure drawing
2.2 参数敏感度分析
通过式(22)、(27)和式(32)可以发现:光伏电池转换效率、储能电池能量密度、功率因子、光伏电池铺装率和设计日期等对充气式太阳能无人机的长航时飞行、最大飞行高度、机翼承载能力都有很大的影响。因此,针对NACA0016 翼型的充气式太阳能无人机,运用前面所编写的翼载荷边界程序对不同参数下的充气式太阳能无人机翼载荷边界进行仿真,得到无人机的翼载荷可行域,如图5所示。
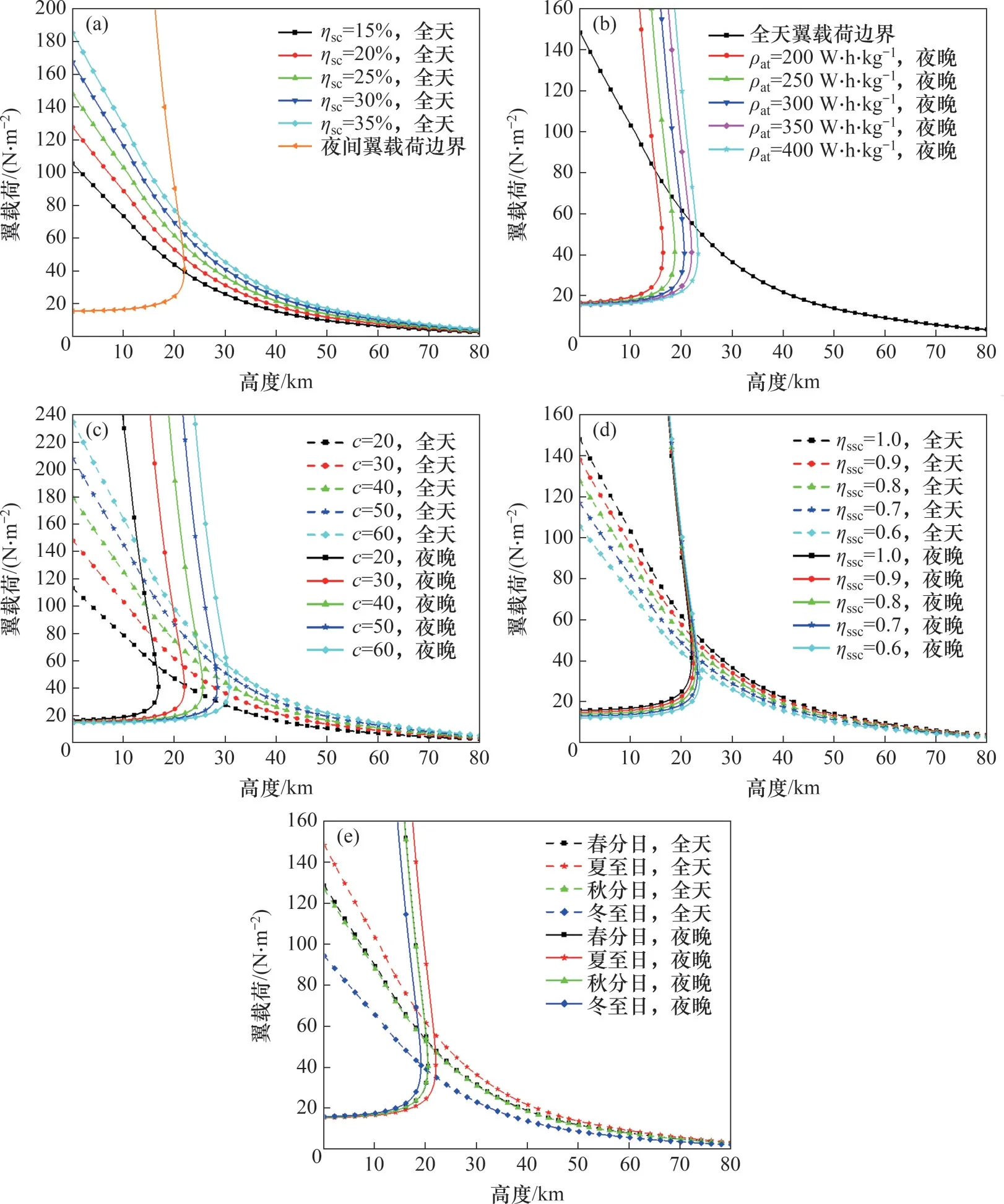
图5 不同条件下的翼载荷可行域的变化Fig.5 Variation of feasible region of wing load under different conditions
2.2.1 光伏电池转换效率
从图5(a)可见:充气式太阳能无人机翼载荷可行域随光伏电池转换效率增大而增大,但增大速度逐渐变小。其原因是随着光伏电池转换效率增大,为了储存产生的能量,储能电池质量也随之增大,继而导致无人机平飞功率增大。由式(32)可知,充气式太阳能无人机最大飞行高度不随光伏电池转换效率变化而变化,但最大飞行高度对应的充气式太阳能无人机翼载荷随光伏电池转换效率增大而增大。
2.2.2 储能电池能量密度
从图5(b)可见:随着储能电池能量密度增大,充气式太阳能无人机的可行域面积增大。结合式(32)可知,在全天能量闭环下,充气式太阳能无人机最大飞行高度处翼载荷与储能电池能量密度呈负相关。
2.2.3 功率因子
由式(22)和(27)可知,全天、夜晚能量平衡下的翼载荷边界均随功率因子的变化而变化,从图5(c)可见:随功率因子增大,夜晚能量平衡下的翼载荷曲线整体向右移动,充气式太阳能无人机的翼载荷可行域逐步增大,充气式太阳能无人机所能达到的最大飞行高度也随之增大。由式(16)可知,增大功率因子会导致无人机平飞功率下降,减小了无人机的能量消耗,继而使得充气式太阳能无人机最大飞行高度增大,且由式(32)可知,无人机最大飞行高度下对应的翼载荷与功率因子无关。
2.2.4 光伏电池铺装率
根据式(26)和图5(d)可知:随着光伏电池铺装率增大,在增大充气式太阳能无人机所能获取的能量的同时,也增大光伏电池的总质量。因此,夜晚能量平衡下的翼载荷边界趋势上仍向右移动,但变化程度较小,致使充气式太阳能无人机的翼载荷可行域面积逐步增大,但增大程度也较小。无人机的最大飞行高度及所对应的翼载荷随光伏电池铺装率增大,存在较小幅度增大。
2.2.5 飞行时间
由式(22)可知,全天能量闭环下的翼载荷边界随着日均辐射强度增大而增大。由式(27)可知,夜晚能量平衡下的翼载荷边界随日光照时间增大而增大。因此,不同设计日期下的充气式太阳能无人机可行域呈以下特征:冬至下的翼载荷可行域最小,秋分及春分下的翼载荷可行域基本相同,夏至日下的翼载荷可行域最大。由式(32)可知,太阳能无人机最大飞行高度及对应的翼载荷边界也随日均辐射强度及日光照时间增大而增大,即充气式太阳能无人机在夏季更容易实现长航时的飞行。
因此,本文针对在夏至日飞行过程、在一定设计飞行高度下的充气式太阳能无人机,进一步研究光伏电池转换效率、储能电池能量密度、功率因子之间的耦合关系。
根据仿真结果,结合式(22)和(27),运用数值模拟方法对飞行高度为16 km时各参数之间的耦合关系进行仿真,结果如图6所示。从图6可见:在夏至日飞行过程中,充气式太阳能飞行器在16 km的飞行高度下,当光伏电池铺装率分别为0.6和1.0时,各参数的设计可行域分别为相应光伏电池铺装率对应的平面以上的区域。
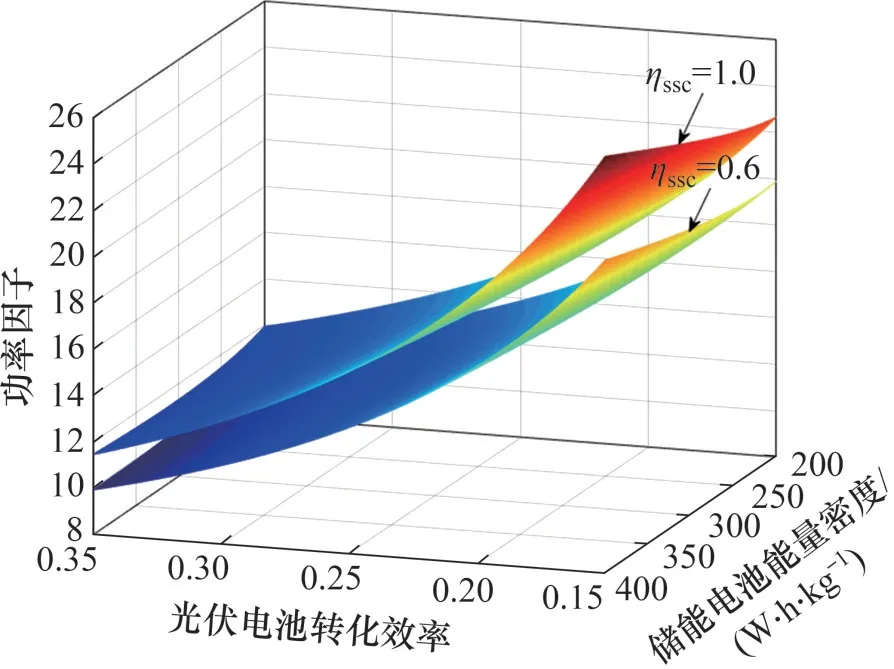
图6 飞行高度为16 km时的各参数间的耦合关系图Fig.6 Coupling relationship between parameters at flight altitude of 16 km
充气式太阳能无人机所需的功率因子随着光伏电池转换效率减小而增大,并随光伏电池铺装率、储能电池能量密度增大而增大。结合前面各因素对充气式太阳能无人机翼载荷可行域的影响可知,光伏电池转换效率、功率因子对翼载荷可行域的影响较显著,储能电池能量密度及光伏电池铺装率对翼载荷可行域的影响较小。因此,在充气式太阳能无人机设计过程中,应重点考虑光伏电池转换效率和功率因子。
3 不同类型的太阳能无人机设计域对比
通过建立的充气式太阳能无人机全天及夜晚能量平衡下的翼载荷边界模型,分析充气式太阳能无人机与常规太阳能无人机翼载荷可行域变化。为保证仿真结果的通用性,无人机机翼翼型分别采用对称翼型和非对称翼型,其相关参数如表1所示。运用所编写的全天、夜晚能量平衡下的充气式太阳能无人机、常规太阳能无人机翼载荷边界程序进行仿真,得到不同翼型和不同类型下的太阳能无人机翼载荷边界随飞行高度变化的情况,如图7所示。图7中红色圆点对应高度为常规太阳能无人机考虑夜间和全天能量循环的最大飞行高度,绿色圆点对应高度为充气式太阳能无人机考虑夜间和全天能量循环的最大飞行高度。全天、夜晚能量平衡下的翼载荷边界曲线与坐标轴Y轴所围成的区域即为充气式太阳能无人机的翼载荷可行域。

图7 不同翼型下不同类型的无人机翼载荷可行域Fig.7 Wing load feasible region under different airfoils and different types of UAV
由图7可知:在不同机翼翼型下,充气式太阳能无人机的翼载荷可行域都明显大于常规太阳能无人机的翼载荷可行域;在NACA0016对称翼型下,充气式太阳能无人机较常规太阳能无人机,最大飞行高度从18.9 km提高到22.0 km;在E387非对称翼型下,充气式太阳能无人机较常规太阳能无人机,最大飞行高度从25.8 km提高到29.0 km。
4 结论
1)充气式太阳能无人机翼载荷可行域受光伏电池转换效率、储能电池能量密度及功率因子的影响较大,光伏电池的铺装率对翼载荷可行域的影响较小。
2)在不同翼型下,充气式太阳能无人机的翼载荷可行域明显大于常规太阳能无人机的翼载荷可行域,且充气式太阳能无人机最大飞行高度比常规太阳能无人机最大飞行高度明显增大。
