基于无人机LiDAR的输电线路勘测设计应用研究
2023-10-28郑滨雁高士虎祖为国谭金石
郑滨雁,高士虎,祖为国,谭金石
(1.广东南海电力设计院工程有限公司,广东 佛山 528200;2.广东工贸职业技术学院测绘遥感信息学院,广东 广州 510510)
0 引言
随着国民经济的快速发展,用电需求越来越大,对电网工程建设要求越来越高[1-2]。输电线路距离长,覆盖地形复杂,对前期勘测要求成果精度高、效率快,给勘测设计工作带来极大压力。传统野外工测方法存在地形复杂、工作环境恶劣、危险性高等问题[3],航空摄影测量法容易受到空域、天气等因素制约,搭载的可见光相机在植被茂密区域的成果精度较低,甚至无法准确获取地面高程[4]。因此,传统勘测方法很难满足当前电网建设需求。
激光雷达(light detection and ranging,LiDAR)是测绘领域继全球定位系统(global positioning system,GPS)之后又一项技术革命[5],它集成激光测距仪、惯性测量单元(inertial measurement unit,IMU)、GPS等先进技术,通过主动发射激光,测量反射信号传输时间、频率变化等参数,确定被测目标的距离、运动速度及方位,从而计算被测目标点云数据。具有主动发射光源、外业工作量少,直接获取地面三维坐标,且数据处理自动化程度高、成果丰富、精度高等特点,已经广泛应用于电力勘测、国土测绘、智能交通、林业等领域。传统LiDAR主要以有人机机载LiDAR为主,适用于大面积区域,租赁飞机费用较高,空域申请时间长。在电力行业,LiDAR技术主要应用于电力巡线、电厂及变电站三维建模、三维输电线路径优化及风电、光伏测图等[6-7]。
针对传统输电线路勘测方法存在的问题,本文利用无人机LiDAR对规划路径进行激光扫描,获取路径区域激光点云、交叉跨越、路径平断面图、塔基地形图等成果数据,辅助电力设计,并通过应用案例验证本文方法的准确性和可行性。
1 无人机LiDAR基本原理及优势分析
1.1 无人机LiDAR基本原理
LiDAR集成激光扫描、GPS差分定位、IMU等技术于一体[8],直接获取三维点云,具有高精度和高效率的优势。激光扫描仪测量激光信号的发射点到目标的距离。GPS差分定位由地面站系统和机载站系统2个部分组成,LiDAR扫描仪与机载GPS相连,地面基准站对机载GPS数据进行差分解算[9]。惯性导航系统(Inertial Navigation System,INS)记录了激光扫描仪的姿态和加速度,工作原理如图1所示。
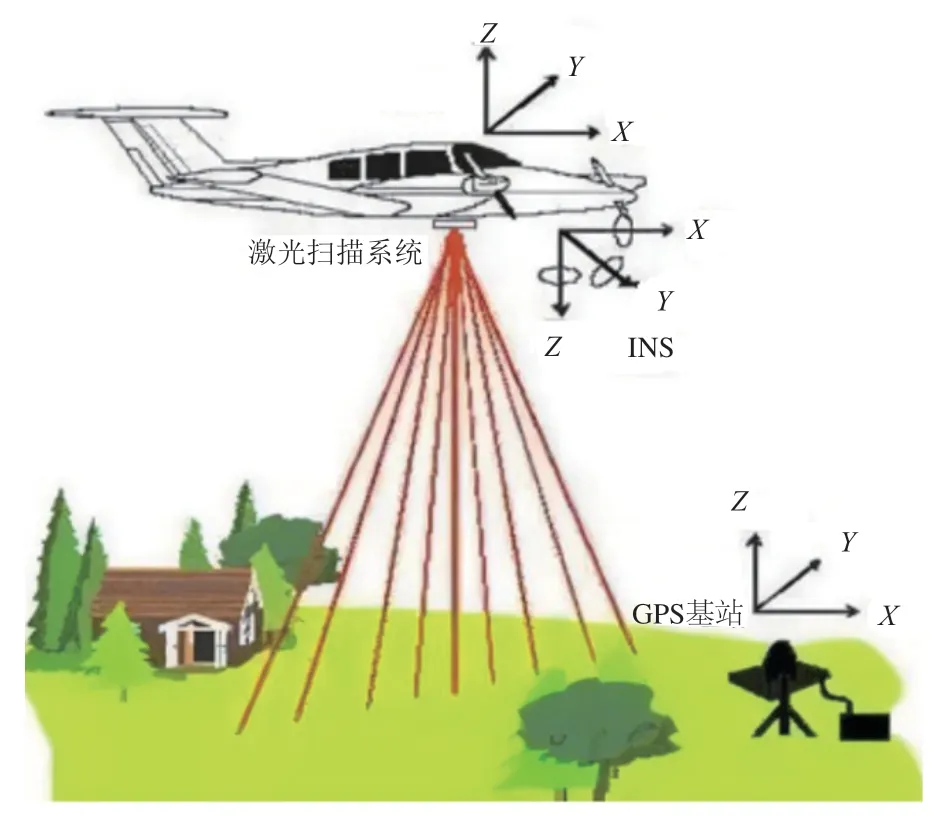
图1 LiDAR工作原理示意图
LiDAR系统的激光发射器发出激光脉冲,到达测量目标物表面反射,接收器接收反射的脉冲信号,再精确测量从发射到反射的脉冲个数,得到真实距离L,如式(1)所示。
式中:f为震荡器频率;n为脉冲个数;c为光速。结合扫描时无人机位置和姿态,计算单个激光点的坐标(X,Y,Z)。
1.2 无人机LiDAR电力勘测优势分析
相对于传统摄影测量技术,LiDAR点云数据能够穿透植被直达地面,高程绝对精度更高,在获取点云数据的同时拍摄影像,经过内业处理得到数字地表模型(digital surface model,DSM)、数字高程模型(digital elevation model,DEM)、数字正射影像图(digital orthophoto map,DOM) 数据。电力勘测设计人员根据这些数据进行信息提取,提取地物、平断面高程、交叉跨越、塔基地形及平断面图,继而进行路径优化。无人机LiDAR应用于电力勘测设计的主要优势如下。
1)机动灵活、作业条件限制少。无人机体积小、操作简便、机动灵活、反应迅速,作业时间灵活,空域的限制少,可以近低空飞行[10]。相对于传统摄影测量作业方式,对天气要求更低,作业有效时长更长。由于LiDAR系统搭载了高精度的GPS和IMU,不需要外业布测像控点,外业作业效率高。
2)激光点云穿透性强。线路覆盖区域往往有较多的植被,存在着被植被遮挡的情况,传统可见光摄影测量难于测量植被底下的地面点,这对探测的结果会有较大影响。LiDAR技术发射的激光脉冲信号对植被具有一定的穿透能力,可以很大程度上减少植被枝叶遮挡等造成的信息损失,准确获取真实的山区地形数据。
3)精度较高、处理速度快。LiDAR搭载高精度GPS和IMU,直接测得高精度三维点云。网络RTK提供动态差分[11],不需要地面架设基准站,提供云解算,全自动解算三维点云数据,经过点云去噪、滤波、坐标转换等工序,快速制作DEM数据。
4)三维场景路径优化。传统方法通常由电力设计人员根据外业测量的平断面图进行排杆设计[12],在交叉跨越、复杂地物的情况下,图形不直观、考虑不周到,往往会出现路径调整和改线,对勘测人员造成一定量的返工[13]。无人机LiDAR可以一次获取DSM、DEM、DOM,构建高分辨率的三维场景,设计人员在逼真的三维场景中清晰地看到线路走廊,便于对建筑区等进行合理避让,避开不良地形条件,优化路径长度,提高经济性和生态环境保护。
5)三维量测、交叉跨越直观。LiDAR点云数据可以进行建筑物、地面、植被、电力线等分类,并且支持三维量测。通过植被高度、导线对地距离计算,设计人员优化选择塔型(不同塔高)和穿越、跨越已有线路的位置,设计出更加合理的路径和塔型,同时减少林木砍伐。
2 无人机LiDAR线路勘测全过程
2.1 无人机LiDAR数据获取
无人机搭载LiDAR系统进行激光扫描前,需要根据LiDAR系统的扫描频率、回波数、有效测程、平面和高程精度、最大扫描角等参数,以及相机拍摄的重叠度、飞行速度等进行航线规划设计[14]。对于输电线路跨越山区地形,传统无人机等高飞行或者分区等高飞行均不能满足无人机LiDAR激光扫描精度要求[15],需要考虑无人机仿地飞行[16]。无人机LiDAR扫描后得到原始点云数据、航拍影像图、无人机GPS数据、IMU数据及地面GPS基准站数据等,具体的数据采集流程如图2所示。
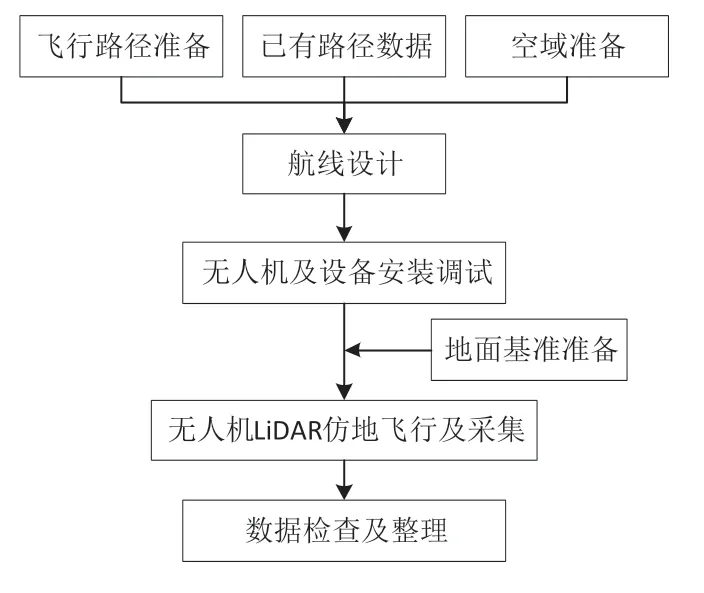
图2 无人机LiDAR数据采集流程图
2.2 LiDAR点云数据解算
LiDAR点云解算:①利用无人机机载GPS和基准站GPS数据进行RTK/PPK差分解算[17];②将差分后的GPS数据与IMU数据进行联合解算,得到无人机高精度轨迹数据。轨迹数据记录了无人机每时每刻的位置和姿态信息,依据此数据对原始点云数据进行定向,解算每个点位的准确三维坐标,同时进行点云赋色,获取真彩色点云,具体流程如图3所示。

图3 无人机LiDAR数据预处理流程图
在实际工程应用中,由于原始解算的点云坐标系为WGS84,与实际工程坐标系往往不一致,还需要利用坐标转换参数进行坐标转换[18],生成标准激光点云数据。
2.3 点云数据滤波分类
LiDAR点云数据包含已有架空线路、植被点、地面点、建筑物及其他地物信息。为了后续更好地提取平断面图、交叉跨越及塔基地形图,需要对点云数据进行滤波分类,其结果直接关系到电力线路勘测的精度。对于输电线路勘测,点云滤波的目标是从点云数据中提取地面点,而将非地面点去除。滤波方法主要有基于坡度的滤波方法、数学形态学滤波方法、不规则三角网滤波方法、曲面拟合的滤波方法、分割的方法等[19-21]。根据分类后的地面点构建DEM数据,可以用于线路勘测中的平断面(中线、边线及风偏等高程点)和塔基地形图绘制。分类后的架空导线点,可用于交叉跨越测量分析。利用所有点云数据采集路径范围内的地物平面图。
在装配式混凝土建筑结构持续发展的过程中,我们必须充分的认识到,装配式混凝土建筑的发展是一个长期的、艰难的、创新的过程。它需要耐心和毅力,不仅需要一点一点的完善和积累,而且需要一个高层次的设计来为建筑业的现代化发展做出贡献。提升和转变建筑业的创新能力是发展装配式技术的核心。站在21世纪新的历史时期深刻认识历史的必然性和未来性,对装配式混凝土建筑结构的发展具有重要的意义。
2.4 线路平断面图自动化绘制
线路平断面数据主要包括地物数据(房屋、道路、河流等)、交叉跨越数据以及中线、边线、风偏等高程点数据,主要是借助ES3D专业软件人工交互式采集。地物数据采集在激光点云数据上进行,采集路径地物平面图,平面地物附带三维属性。交叉跨越数据直接基于激光点云采集三维导线。对于中线、边线、风偏等高数据的提取,根据已确定的线路路径转角坐标,直接利用DEM数据进行中线、边线和风偏的提取。利用采集的带三维数据的地物平面图和激光点云DEM数据,可以全要素提取电力线路设计平断面图。根据含属性三维DWG矢量图,利用CAD三维视图优化调整路径,一键输出全要素(地物、交叉跨越、断面边线等)ORG平断面。根据全要素平断面,深度评价优化线路的合理性,最终确定优化后路径,测量依据最终优化排杆后成果进行终勘定位,检查补测部分数据。
2.5 塔基地形图测绘
传统方法是逐个整理测量的塔基地物点坐标和高程点数据,逐个成图,过程步骤多,耗时长。本文利用ES3D软件进行批量绘制塔基地形图,包括自动提取塔基范围高程点、读入文本坐标数据、自动换算塔基局部坐标、构建三角网绘制等高线和部分地物、套图框、绘制方向线等过程,实现一键批量绘制。
3 试验与分析
3.1 试验区概况
试验区选取220 kV兴瑶—硫都(安塘)第二回线路改线工程,主线全长24.56 km,本次断面复测范围选取本工程J1-J21段,长度约8 km。共划分4个区块开展航飞工作。测试区包括灌木丛、稀疏林地、茂密山林、梯田地、河流等典型地形地貌。在测试地区使用大疆M300 RTK搭载最新的大疆L1 LiDAR测绘相机进行实地测试,用无人机搭载LiDAR获取点云数据、影像数据等。
3.2 线路勘测过程
外业数据采集采用LiDAR测绘相机。由于测区为丘陵地段,海拔高度为10~100 m,为避免因地形起伏带来的飞行风险,采用12.5 m分辨率DEM进行航线规划。外业实施时飞行高度100 m,飞行速度8 m/s,平行于线路进行数据采集。设置航向重叠度为80%,旁向重叠度40%,落差比较大区域为50%。点云密度约200个/m2。飞行过程以“带状仿地飞行”方式开展,将规划好航线导入控制器,自主飞行,自动化进行激光扫描。
激光点云的数据解算采用大疆智图软件,包括解算飞行航迹、解算激光点云、特征提取、航带平差、点云去噪、数据合并、精度检核、质量检查等操作,完成激光点云数据的解算处理,解算后的点云数据效果如图4所示。

图4 无人机LiDAR点云滤波前效果图
地面点的提取即点云滤波的过程,这里采用渐进三角网的方法,最大建筑尺寸为20 m,迭代角度20°,迭代距离1.8 m,滤波后效果如图5所示。

图5 无人机LiDAR点云滤波后效果图
采用ES3D测图软件采集路径地物平面图,平面地物附带三维属性。本次测绘1∶500地物平面图面积1 785 804.28 m2,提取地形图要素满足GB 50026—2020《工程测量标准》中1∶500数字线划图测绘的精度要求,如图6所示。
根据点云滤波分类后生成的地面点,提取末次回波的点云数据后通过网格化、填补小漏洞、剔除粗差点云以及内插高程点等过程制作DEM成果。根据路径转角塔坐标、地物平面图、交叉跨越等数据,利用ES3D软件一键生成平断面图,输出行业主流的道亨格式,如图7所示。
3.3 精度分析
2)塔基地形及断面点高程精度分析:利用传统RTK工程测量方法从塔基地形和线路中线、边线、风偏等位置线路勘测关键点位测量高程点,记录其平面和高程值,作为近似真值。利用这些点的平面坐标,从点云数据构建的DEM数据中自动提取对应点位的高程值,将两者进行比较。最大差值为0.449 m,最小差值为-0.4 m,中误差为0.28 m,符合GB 50026—2020《工程测量标准》要求,同时也满足GB/T 50548—2018《330~750 kV架空输电线路勘测标准》平坦地及丘陵误差不大于0.5 m的规范要求。具体的误差分布图如图8所示。
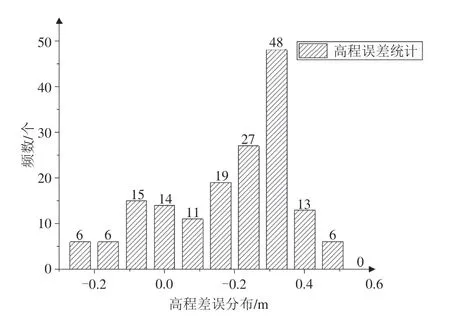
图8 高程误差区间分布图
3)线高测量精度分析:找一处已建成的架空线路,利用2种测量方式同步进行,避免由于温度不同导致导线变形。首先利用RTK和全站仪结合的常规测量方式,测量跨越线的最低导线和穿越线的最高导线,测量中线、边线的点,以这些数据作为近似真值(参考值),然后利用的无人机LiDAR测量方法扫描架空线路导线数据,将两者测量值进行对比分析,得知线高测量中误差为±0.057 m。
4 结论
针对传统输电线路勘测方法存在的问题,本文对无人机LiDAR应用于输电线路勘测设计进行应用研究。首先阐述无人机LiDAR基本原理及优势,对涉及到的LiDAR点云数据获取、数据预处理及滤波分类等关键技术进行分析研究,然后利用工程案例进行试验,数据采集、处理及成果制作全流程,以及对关注的地面点平面精度、塔基地形及断面点高程、线高测量等进行精度检验与统计分析,获得以下结论。
1)无人机LiDAR技术,相对传统大飞机LiDAR,具有灵活、便捷、成本低等优势,相对于可见光航测,激光点云具有穿透性,特别适合输电线路跨越山区地形勘测。
2)通过无人机LiDAR获取的高精度点云数据,可以方便快捷地生成平断面图、塔基地形图及交叉跨越,其自动化程度和整体精度更高,外业人员只需进行少量检核工作,既保障作业人员安全,又大幅度提升工作效率。
3)激光点云测量的数据成果丰富,包括DOM、激光点云及平断面图等,采集平面数据附带三维属性,方便设计人员立体化排杆设计,优化路径。对于少量的路径调整,测量成果可以直接使用,不需要返工重测。
虽然无人机LiDAR在输电线路勘测设计中可以大大提升工作效率,成果精度满足规范要求,但也存在不足之处,山区地形复杂,植被覆盖密集,还需要人员外业核实确认,后续需要搭载新型传感器,提升测距精度和地面识别度。
