山地地理测绘勘探中反射式激光雷达回波特征优化监测研究
2023-10-28刘胜杰黄振利刘云龙
刘胜杰,黄振利,杨 磊,刘云龙
(中国人民解放军第32022部队,武汉 430079)
0 引言
反射式激光雷达是用来检测目标位置和速度等特征的雷达系统,其工作运行方式是将探测信号发送给目标,并将所接收到的目标回波信号与所发送的目标信号进行对比,经过合适的预处理即可获取目标的相关资讯,如距离、方位、高度、速度、姿态和形状等,从而探测出目标。反射式激光雷达将GPS与惯性导航系统相融合,通过两者密切配合可以准确地分辨特定的反射速度所造成的冲击痕迹,能够获得精确的数字高程模型,具有激光的测距精度高的技术优势。
我国是一个国土辽阔、森林资源丰富的国家,多样的地理类型造就了多样的水土类型[1]。随着地壳的运动,地貌在潜移默化中发生巨大的改变。由于我国基建需求,自20世纪80年代开始对山地树木、矿山大量开采,从而导致我国大量的土地水资源流失,山体框架改变,极易引发泥石流、滑坡等自然灾害[2-3]。基于上述问题,对我国山地地理特征进行必要的测量监测,就成为政府林业部门急需解决的问题之一。针对这一问题的研究较多,以遥感图像为基础的监测测量方法,在这方面起到巨大的作用,为了能够更加明确我国山地地理现状,相关学者一直对我国山地的地理监测方法展开进一步优化研究。
文献[4]中首先将基站作为远端散射体,移动台作为近端散射体对数据进行采集;通过采集结果建立三维的信道模型;通过米塞斯分布方法获取模型方位角、仰角等分布参数;利用相关函数计算模型,根据计算结果实现地理的监测。该方法由于未能在地理监测过程高度以来参数精度,导致该方法在监测时难以有效地监测到地理的变形量。文献[5]中提出基于GNSS/INS紧耦合的水陆地理三维一体化崩岸监测方法。该方法在利用组合导航系统对数据实施紧耦合处理的基础上,通过时间匹配的方式分析数据误差,再通过时间归算完成地理监测。该方法在进行数据匹配时,存在耗时问题,导致该方法的监测效果存在弊端。文献[6]中提出矿区地表移动“空天地”一体化监测方法。该方法基于采集的相关数据以及处理结果建立空天地一体化监测体系;并基于相关要求制定高精度、高效率的监测准则;使用三维激光扫描技术运行监测体系,实现对地理的监测。该方法在制定监测准则时,约束条件过多,导致该方法的监测应用性能差。主要因为上述以回波重构方法为基础的地理测绘勘探在山地区域应用,会出现光斑回波叠加,导致特征监测效果差。文献[7]提出背负式移动激光扫描系统测绘大比例尺地形图精度试验研究,在大规模地图上使用背负移动的激光扫描仪,以苏州工业区的测绘GIS大厦为对象,对点云进行了预处理,提取特征点,并将特征点以MicroStation V8联图的方式绘出1:500的地图。该方法在测绘时难以有效地监测到地理的实时变化,导致测绘不精准。文献[8]提出机载激光雷达辅助地形图绘制的应用实践,利用航空摄影技术将激光雷达、惯性导航、高精度数字摄像机、数字照相机等资料收集,再进行高线的提取、修改和上报等工作,该方法在绘制中存在误差,导致该方法的监测效果不佳。
为解决上述地理监测过程中存在的问题,本研究通过采集反射式激光雷达光斑数据,结合抗干扰模型,实现对山地地理测绘勘探区域的优化监测。所研究内容的创新点是优化设计反射式激光雷达在山地地理测绘勘探中的应用过程,确定其相关参数。并通过分区对山地地理扫描,整合扫描结果,采集该山地地理特征的激光雷达回波数据。同时设计一种光斑回波波形分解模型,通过分解处理获取地理特征,去除光斑回波叠加干扰。研究表明,本文方法进行地理变形监测时效果较好。
1 反射式激光雷达山体地理监测数据采集过程设计
常规的激光雷达多维透射式系统光学接收装置的厚度过大、透光率低,增加接收装置的发射功率后,山地低空近距离的回波信号很强,容易造成接收系统饱和,甚至造成高灵敏度的探测器失效,且其主光学孔径通常为中等孔径,在实际应用中由于制造材料、机械结构和发射体积等因素的限制,使得中等孔径的分布变得极为困难,不适合大范围山地使用。故本文利用反射式激光雷达完成山地地理测绘勘探区域监测,反射式激光雷达的应用原理如图1所示。
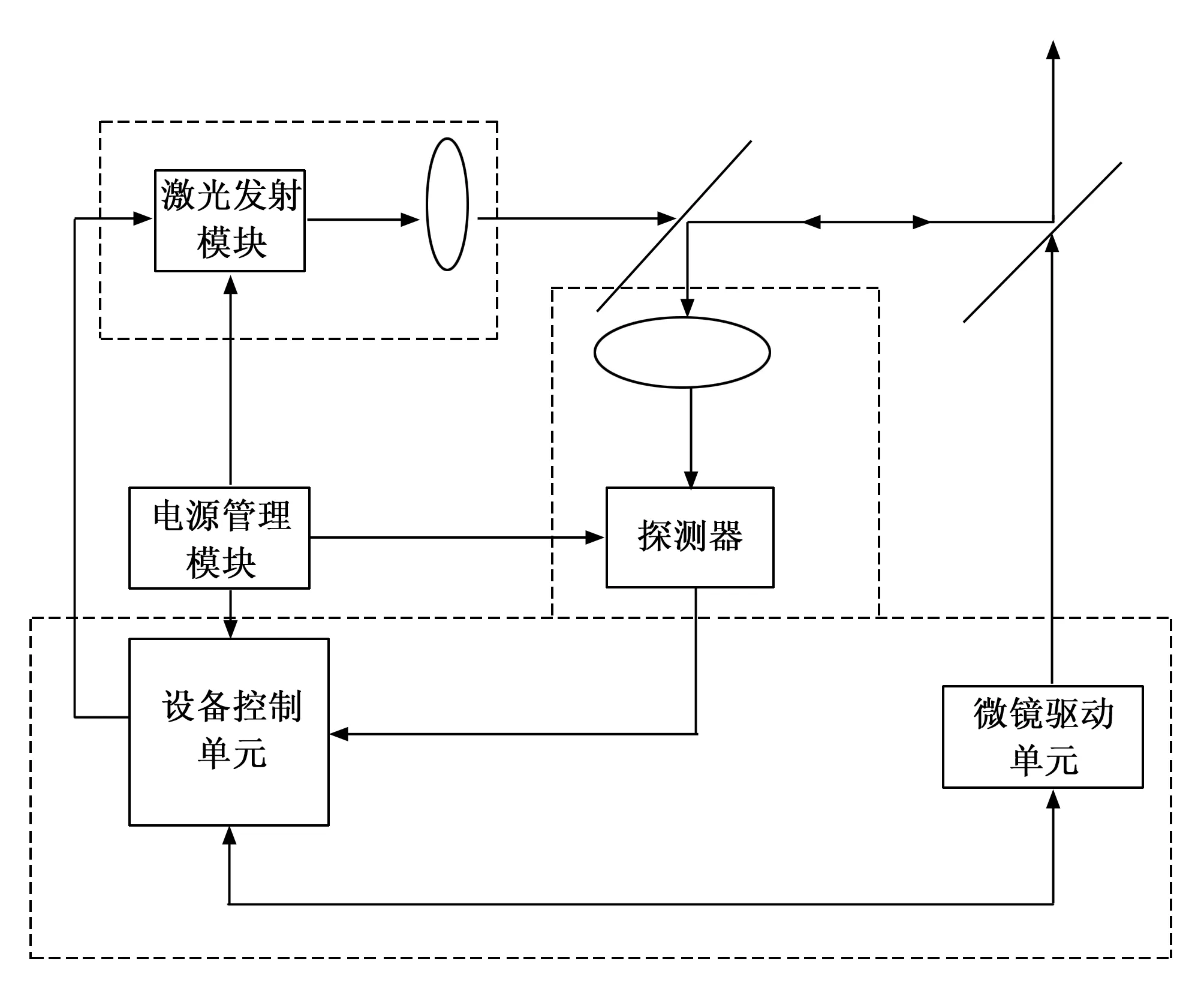
图1 反射式激光雷达原路图
假设β1表示副镜放大率,β2表示第三镜放大率,β3表示第四镜放大率。不同镜片的曲率半径的约束条件如下:
(1)
物镜镜片间距应当满足如下关系:
(2)
反射式激光雷达发射的激光照射到障碍物以后,通过障碍物的反射,反射光线会经由镜头组汇聚到接收器上,如果靶放在抛物面镜的焦点处,入射光线会被阻挡一部分,从而仅使用抛物面镜的一部分,达到让光束离轴入射的目的,因此需要设置第三镜离轴角、副镜离轴量等。依据此原则在应用过程中,设置第三镜离轴角为73.866°,副镜离轴量为12.5 mm,在空间频率801 p/mm处,MTP值均大于0.4,可较好区分入射、反射信号。反射式激光雷达山体地理监测数据采集过程具体步骤为:
步骤一:用脉冲激光器把激光信号送到反射镜面上,然后到达电机扫描系统,再通过镜子从山体处反射回来。
步骤二:把从山体处的回声信号再向副镜、第三反射镜和第四反射镜进行反射,最终再向主反射镜进行反射,包括山形的回声信号被反射至信号通路。
步骤三:由检测器接受并对3个信道的激光回波进行分析,再送至取样回路,并将采集到的数据进行储存。
2 方法的优化过程设计
2.1 山地区域光斑数据采集
假设反射式激光雷达设备在山地地理特征勘探过程中,其扫描仪高度为G、扫描半径为R、扫描角度为β,且扫描高度会随着扫描半径及扫描角度的增加而逐渐增大[9-10],表述形式如下所示:
G=R×cotβ
(3)
式(3)中,余切函数标记为cot的形式。采用反射式激光雷达对山地地理的地面进行投影计算时,激光雷达的竖直间距直接影响反射式激光雷达扫描结果,对此需对激光雷达的竖直间距进行确定[11-12],表达式为:
szl=d×tanβ
(4)
式(4)中,激光雷达扫描的竖直间距为szl,山地地面竖直间距为d,正切函数标为tan。
最后依据上述流程确定反射式激光雷达的相关参数,并通过分区对山地地理进行一一扫描,整合扫描结果建立该山地地理数据集,由此设计光斑回波波形分解模型。
2.2 光斑回波波形分解模型设计
由于山地地理环境较为复杂,可以使雷达反射波变得杂乱而没有规律,使反射式激光雷达接收机接收不到目标的有效信号,从而无法对目标进行跟踪和锁定;发射机发射雷达波束,接收机接收从目标处反射回来的反射式激光雷达波束,从而才能确定目标的高度、速度、作标、状态等。因山地地理环境通常呈现中部高四周低的形态,会出现较为明显的回波干扰,所以需要采用反射式激光雷达对目标区域进行分类别扫描,并建立对应的光斑回波波形分解模型,对反射式激光光斑进行针对性分解处理,提高对地理变形量的检测效果,去除回波干扰。
1)区域类别1为山地平坦地理:
在山地平坦地区,反射式激光雷达回波脉冲波束宽度不会发生变化,所以反射回的回波波形形状也处于不变的状态[13-14]。设定山地目标的散射角为各向同性散射,可将建立的回波分解模型转换成高斯函数进行表述,如下式所示:
(5)
式(5)中,地理的采样时刻标记为x,目标组分位置标记为η,脉冲宽度标记为ε,建立的回波分解模型高斯函数表示形式为g(x)。
2)区域类别2为复杂地理:
在山地的复杂地理中,反射式激光雷达的发射脉冲在接收时会出现振幅衰减或反射回角度不同的问题[15-16],脉冲宽度也被相对扩宽,回波组分多样后建立的回波分解模型如下式所示:
(6)
式(6)中,组分数量标记为m、位置标记为ηj,组分脉冲波形标记为gj(t)。由此完成光斑回波波形分解模型构建,根据该模型,实施山地地质环境监测序列的小波去噪处理。
2.3 山地地质环境监测序列的小波去噪
传统的反射式激光雷达勘探未曾识别地质环境监测信号里的非线性关系,导致去噪后的时间序列核心信息缺损。小波降噪属于一类性能十分突出的非线性滤噪方法,它的本质为经过对山地地质环境监测数据时间序列的分解,研究分析并获取山地地质监测数据每部分中的“异常”成分并筛除属于噪声的成分,以此实现山地地质环境监测数据去噪[17-18]。但是非线性系统的频谱较宽,对山地地质环境非线性时间序列滤噪时选取小波函数十分关键,必须准确划分哪些属于有效信号,哪些属于噪声信号。
假定g(x)属于山地地质环境监测信号的监测序列,在山地地理测绘勘探中把山地地质环境监测信号描述成差异频率成分的线性数据,如式(7)所示:
g(x)=Li(x)+Oi(x)
(7)
式(7)中,Li(x)表示山地地质环境监测信号处于空间x的投影,Oi(x)表示山地地质环境监测信号处于空间x的映射。山地地质环境监测信号小波分解式如下所示:
(8)
式(8)中,F表示环境的脆弱性数据,根据山地地质环境监测信号的尺度函数,Ti表示与之对应的低通滤波器,Vi+1表示山地地质环境监测信号的i+1分辨率离散细节信号。在此基础上,山地地质环境置信度表示为:
(9)
式(9)中,G表示山地地质环境置信滤波因子,Ui+1表示山地地质环境置信离散因子,Vi+1T表示山地地质环境置信监测信号在i+1分辨率中的离散细节信号转置[19]。
山地地质环境监测数据重构时,把和噪声对应的细节信号实行相关阈值处理,以此重构数据实现去噪,其表达式如式(10)所示:
(10)
式(10)中,gI(x)属于g(x)滤波后的平滑数据,也属于去噪后的山地地质环境监测信号,LI(x)表示山地地质环境去噪信号处于空间x的投影,OI(x)表示山地地质环境去噪信号处于空间x的映射。为了优化去噪效果,小波重构时将细节数据处理时必须掌握监测序列的先验信息,即为掌握噪声的种类,获取山地地理检测特征,完成山地地质环境监测序列的小波去噪,根据去噪结果,获取山地地理检测特征。
2.4 山地地理监测特征获取
2.4.1 坐标转换
在测量山地地理地貌前,需要结合去除回波干扰后的数据集,建立平面坐标系,并实现山地的高程转换,消除坐标失真的干扰。基于反射式激光雷达光斑数据建立山地地理平面坐标系[20-21],再通过工程测量结果建立山地实测坐标系,其发射过程如图2所示。
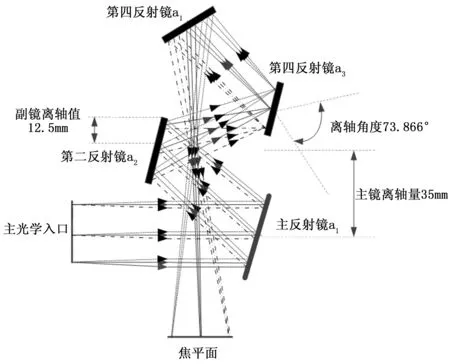
图2 反射式激光雷达线路图
结合图2,将该平面坐标转换为参数模型转换,假设X0、Y0均表示坐标平移参数,ɑ表示旋转参数,δ表示变换尺度,坐标内任意点标记为R,位置标记为(X1,Y1)以及(X2,Y2)形式,二者关系如下式所示:
(X2,Y2)=(X0,Y0)+(1+δ)F(α)(X1,Y1)
(11)
式(11)中,坐标变换尺度矩阵标记为F(ɑ),利用最小二乘拟合方法对其进行求解计算,过程如下式所示:
(12)
式(12)中,分块编号标记为i,拟合系数标记为β(x),基函数标记为qi(x),完备多项式标记为e,数量标记为k。基于上述计算结果,使用形函数对基函数进行优化处理,从而取得最佳拟合函数,过程如下式所示:
(13)
式(13)中,n阶基函数标记为y,拟合函数标记为g(x),形函数标记为θn(x),拟合因子标记为ωki。最后通过该拟合函数完成坐标系的转换。
2.4.2 山地高程转换
设定反射式激光雷达高程值为h,以此计算山地地理高程值起算面值hqs,过程如下式所示:
hqs=h+C
(14)
式(14)中,坐标系的任意高程差标记为C。设定坐标系的任意高程差与平面坐标之间存在关系,使用平面拟合法对二者关系进行计算,过程如下式所示:
C=F(x,y)=ox+py+q
(15)
式(15)中,山地平面坐标标记为F(x,y),坐标参数标记为o、p、q,坐标方向标记为x、y。最后基于上式计算结果获取各项参数,将反射式激光雷达高程值转换成水平面高程值。
2.4.3 生成山地等高线
由于采集的反射式激光雷达数据集的数据量较大,故可利用曲率采样法避免数据冗余对监测结果的影响,具体过程如下:
1)设置一个百分数,用最小二乘法求出面曲率。
2)将曲率计算结果排序,划分为若干数据区域空间。
3)依据设定的百分比值获取反射式激光雷达数据乘积值,完成反射式激光雷达数据的再次采集,提取山地等高线。
4)基于获取的山地等高线,建立山地数字地理模型,完成山地地理测绘勘探区域的测量。
最后将测量结果与往年测量结果进行对比,实现山地地理的变形监测。
3 应用实验与结果分析
为了验证上述基于反射式激光雷达山地地理测绘勘探区域监测方法的整体有效性,设计如下测试过程。
实验以某地区为监测对象,其位于东经115°27′~116°35′、北纬28°10′~29°11′之间,处于南昌市西郊30公里处,多为剥蚀低山丘陵,海拔一般标高为300~500 m。研究地区地理范围如图3所示。
图3 研究地区地理范围图
为避免实验结果过于单一,实验过程中,分别采用反射式激光雷达数据采集在山地地理监测中的应用(本文方法)、基于GNSS/INS紧耦合的水陆地三维一体化崩岸监测技术(文献[5]方法)、矿区地表移动“空天地”一体化监测技术研究(文献[6]方法)进行测试。
为使所获取的点云在统一坐标系下进行匹配和拼接,并在测区内设置有分布于测区内、各点之间相对稳定的点。为获得高精度的测量资料,采用与反射式激光雷达相对应的目标作为控制点,通过在选定的控制点上设置相应的目标,由于受测地形的变化,需要在地面上安装反射式激光雷达,每一次扫描都要对同一目标进行扫描。实验数据处理软件为ENVI LiDAR,参数如表1所示。
在此基础上,展开具体的测试,过程如下:
1)首先选定较为平坦山地地理测绘勘探区域,设定反射式激光雷达数据密度为1 643 pts/m2,平均点间距3.4 cm。分别利用3种方法对研究地区的地理变形量展开监测。
2)其次选取坡度较大但不突出的山地地理测绘勘探区域作为测试环境,设定该环境反射式激光雷达数据密度574 pts/m2,数据平均点间距为4.6 cm。同样分别利用3种方法对研究地区的地理变形量展开监测。
3)然后选取地势复杂的山地地理测绘勘探区域作为测试环境,设定该环境反射式激光雷达数据密度35 pts/m2,数据平均点间距为14 cm,分别利用3种方法对研究地区的地理变形量展开监测。
4)之后在完成上述对于不同地势的山地地理测绘勘探后,检验3种方法下获取到的山地地理数据的信噪比指标。
5)最后在确定信噪比基础上,对3种方法采集山地地理区域图时存在的空洞情况进行分析。
直接应用反射式激光雷达仪器获取检测对象的地理勘探区域扫描图,运用3种方法在实验中得到的反射式激光雷达地理勘探区域扫描图,具体如图4所示。
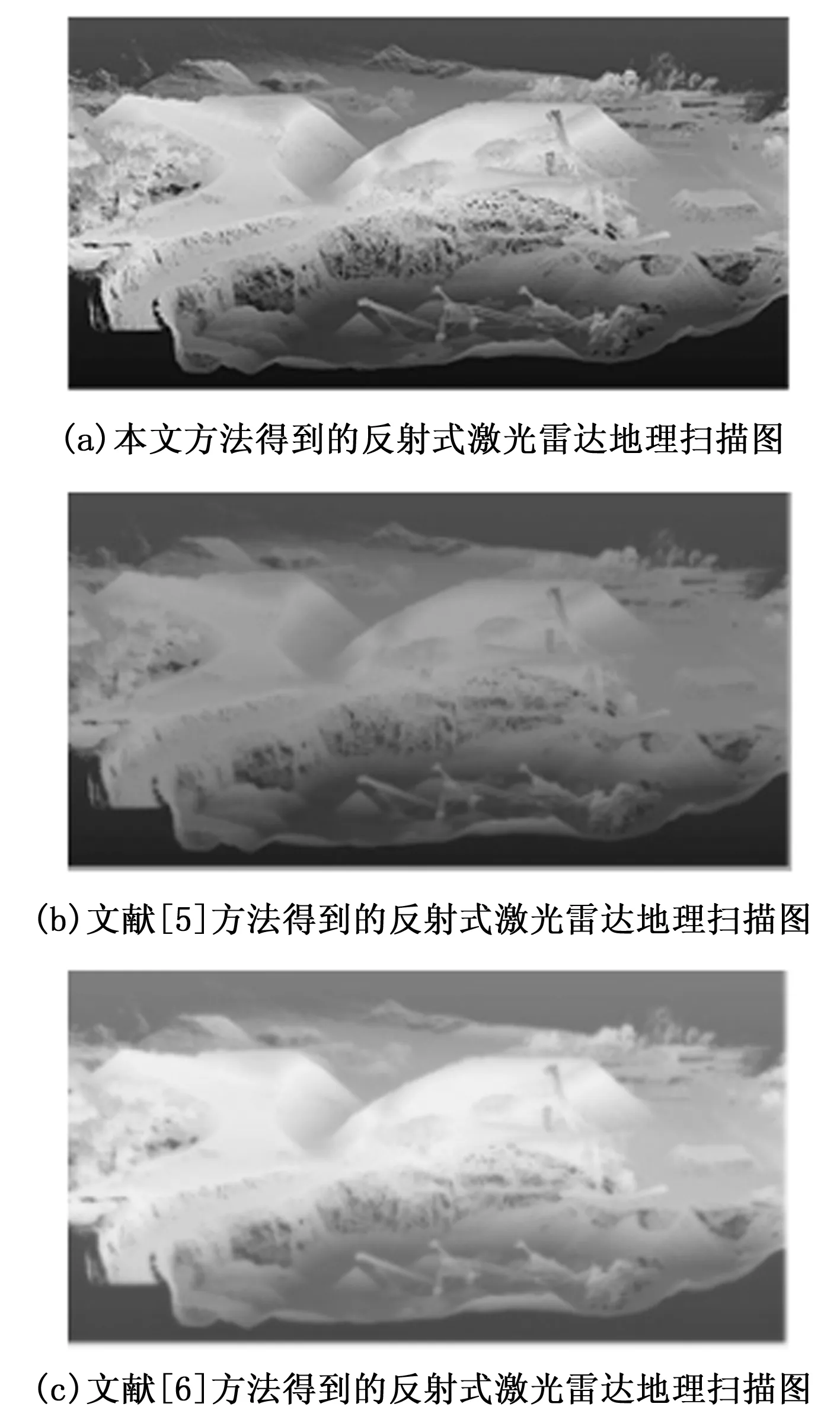
图4 反射式激光雷达地理扫描图
由图4可以看出,对比文献[5]方法和文献[6]方法,本文方法得到的反射式激光雷达地理扫描图更为清晰,能够更好地采集山地地理数据,实现对于山地地理的勘测。
针对平坦山地地理测绘勘探区域,选定500个数据组成5组数据,其中1、3、5组含噪声数据,2、4组为无噪声数据,采用本文方法、文献[5]方法以及文献[6]方法进行地理监测时,对3种监测方法的监测到的地理变形量进行测试,测试结果如图5所示。
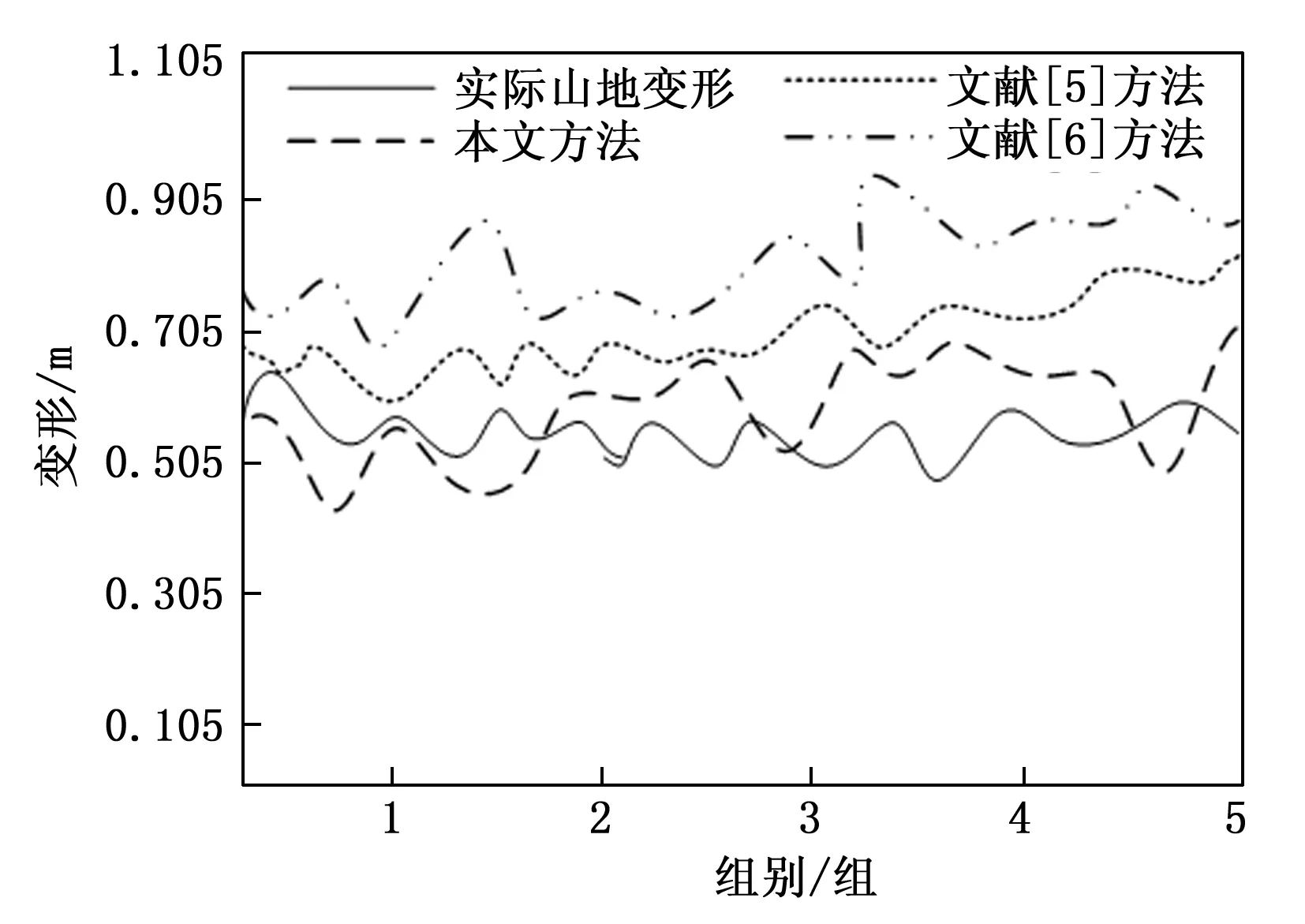
图5 不同监测方法地理变形量监测结果
分析图5可知,组别的不同测试出的监测效果也不相同。由于组2、组4中不存在噪声数据,所以监测结果与实际地理变形量之间存在的差距较小,而组1、组3和组5中存在噪声数据,所以监测效果要较差。实际山地变形在0.505 m处上下波动,本文方法在进行地理监测前,对地理的特征进行了提取,所以在测试过程中,即便数据组别中存在大量噪声数据,地理变形量的监测结果依旧与实际地理变形结果相接近。而文献[5]方法与文献[6]方法测试出地理变形量与实际地理变形量之间存在较大误差。由此可知,本文方法在进行地理变形监测时的监测效果好。
针对坡度较大且光斑数据密度较大的山地区域,采集500个数据组成5组数据组,采用本文方法、文献[5]方法以及文献[6]方法进行地理监测时,测试该环境下的地理监测效果,结果如图6所示。
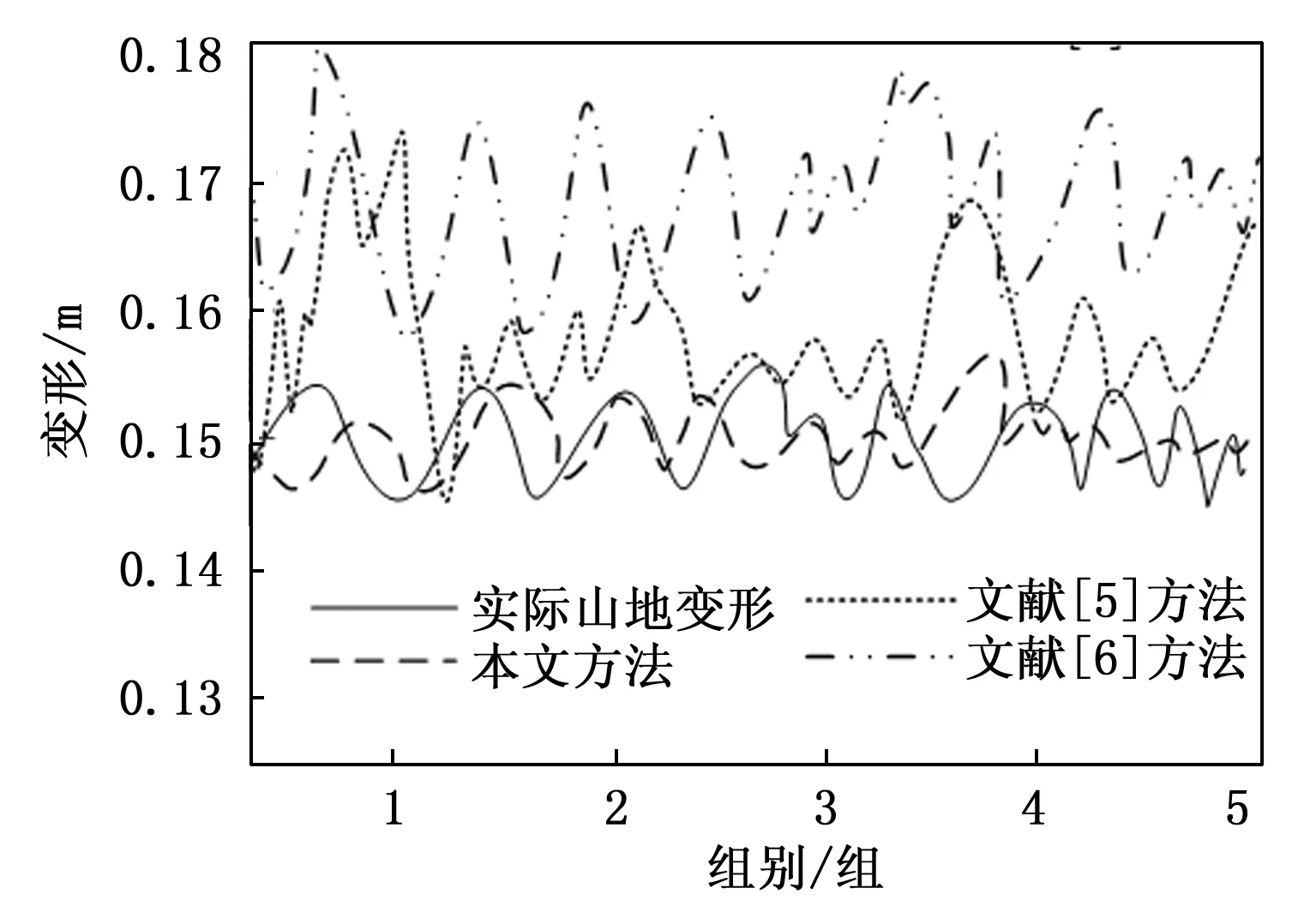
图6 大坡度环境监测效果测试结果
分析图6可知,该环境山地变形量监测效果与平坦无坡度环境的监测效果之间存在些许差距。本文方法在进行山地变形量监测时监测结果与实际山地变形量监测结果相差较小,在0.15 m处上下波动,监测误差可忽略不计。文献[5]方法监测结果低于本文所提方法检测效果,高于文献[6]方法监测结果,文献[6]方法监测结果较差,与实际山地变形量之间存在明显差距。由此可知,本文方法在山地坡度较大时,监测效果较理想。
针对地势复杂且光斑数据密度较小的山地区域,同样采集500个数据组成5组数据组,采用本文方法、文献[5]方法以及文献[6]方法进行地理监测时,测试该环境下的地理监测效果,结果如图7所示。
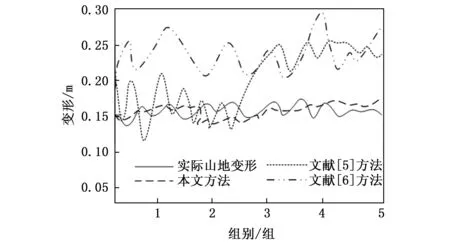
图7 密度稀疏下3种监测方法的监测变形量测试结果
分析图7可知,本文方法山地变形量的监测结果与实际山地变形量结果相接近,在0.15 m处上下波动,文献[5]方法与文献[6]方法山地变形监测结果与实际山地变形结果之间存在较大差距。由于地势复杂,所以3种方法在监测期间监测效果不如地势平坦的区域,致使3种方法的监测效果低于地势平坦区域的监测效果。整体来看,本文方法在进行山地变形量监测时的监测效果要优于文献[5]方法与文献[6]方法的监测效果。
针对选定的山地区域,采集500个未经处理的数据组成5组数据组,以图4中本文方法、文献[5]方法以及文献[6]方法下的反射式激光雷达地理扫描图为基础,对不同数据组的信噪比进行分析,具体的分析结果如图8所示。
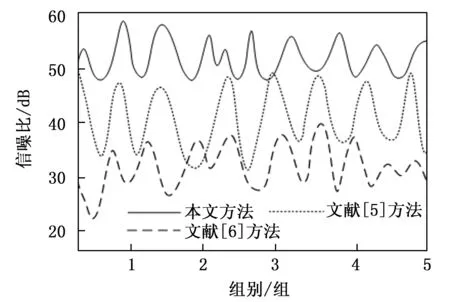
图8 3种监测方法的信噪比分析结果
分析图8可知,本文方法下对于山地地理勘测的数据信息采集的信噪比较高,最大值为59 dB,最小值为49 dB,说明本文方法下的反射式激光雷达扫描图的图像质量较为优良,存在噪声较少。文献[5]方法与文献[6]方法对于山地地理勘测的数据信息采集的信噪比之间存在较大差距,相比于本文方法信噪比较低,最大值分别为50 dB、40 dB。最小值分别为32 dB、12 dB,说明文献[5]方法与文献[6]方法下的反射式激光雷达扫描图的图像质量较差,存在一定噪声。整体来看,本文方法对于山地地理勘测的数据信息采集的质量要优于文献[5]方法与文献[6]方法的采集质量。
在进行山地地理测绘勘探时,由于受外部环境的影响,往往会出现一些无法探测到的区域,也就是空洞。由于空洞的存在,不但不能对地形进行精确、完整的建模,而且对模型的后续处理也有一定的影响。因此,以本文采集对象的局部地形为例,采用本文方法、文献[5]方法以及文献[6]方法对不同数据组的空洞情况进行分析,结果如图9所示。
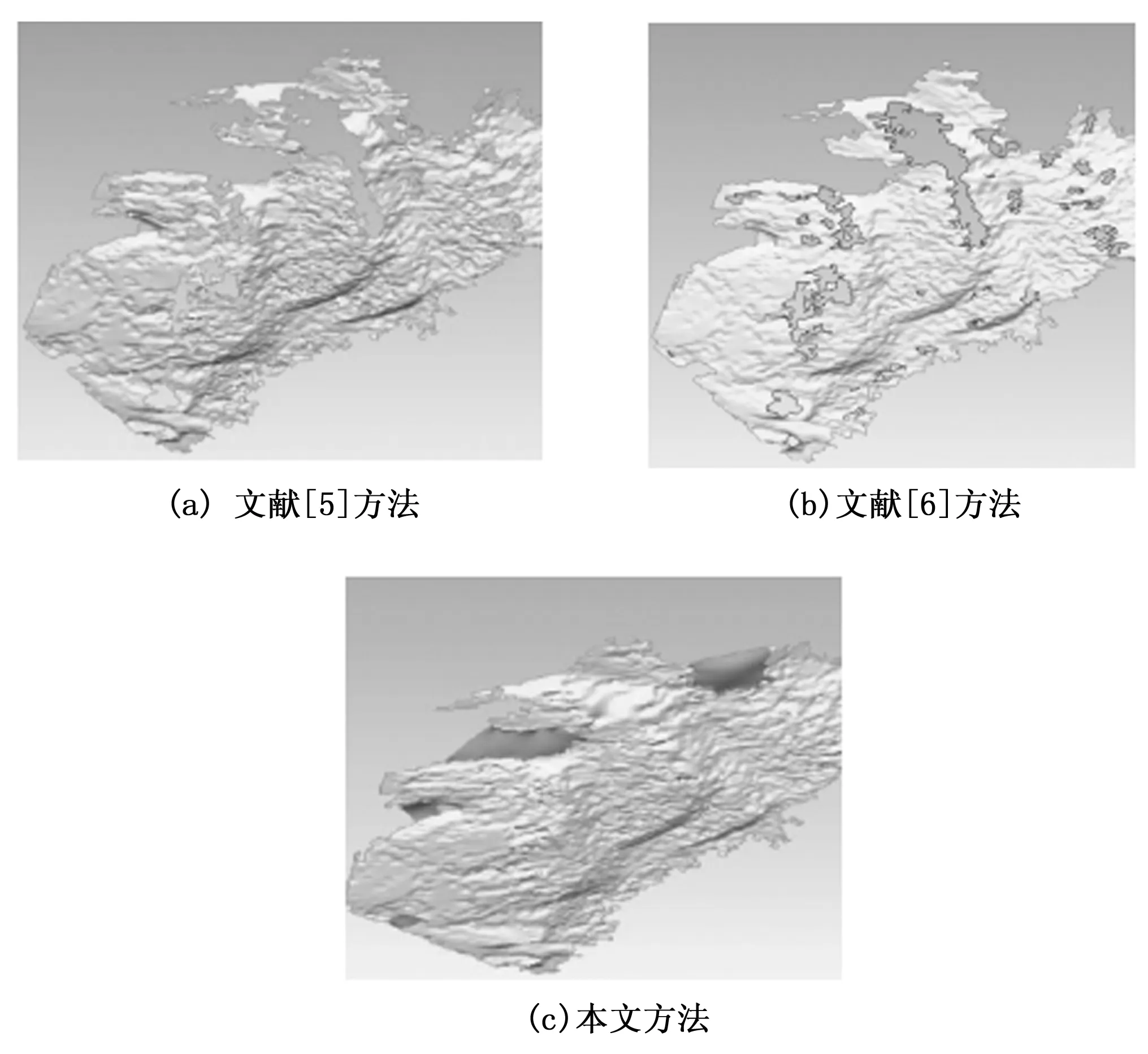
图9 不同方法采集空洞对比图
由图9可知看出,采用文献[5]方法与文献[6]方法对山地地理进行勘测时,其获取的地形图存在较多空洞,后期对整体地形进行修复时,会出现与实际地形图误差较大的问题。而采用本文方法时,其存在空洞较小,与原地形误差较小,具有一定的优势。
基于上述测试结果可证明,本文方法进行山地地理监测时,该方法具备良好的监测效果,证明该监测方法的监测性能高。
4 结束语
针对山地受到环境影响导致监测效果差的问题,本文采用反射式激光雷达对山地地理测绘勘探区域监测进行优化研究。该方法创新之处是优化设计反射式激光雷达在山地地理测绘勘探中的应用过程,并通过分区对山地地理扫描,采集该山地地理特征的激光雷达回波数据。通过提取相关山地地理特征建立山地地理二维坐标系,生成山地数字地理模型,完成山地地理测绘勘探区域的测量,最后通过测量结果实现对山地地理的变形监测。通过研究得到如下结论:
1)本文方法得到的反射式激光雷达地理扫描图更为清晰,能够更好地采集山地地理数据,实现对于山地地理的勘测。
2)在进行地理监测前,本文方法对地理的特征进行了提取,所以在测试过程中,地理变形量的监测结果与实际地理变形结果相接近,进行地理变形监测时的监测效果好。
3)本文方法在进行山地变形量监测时监测结果与实际山地变形量监测结果相差较小,在0.15 m处上下波动,监测误差可忽略不计,在山地坡度较大时,监测效果较理想。
4)本文方法下对于山地地理勘测的数据信息采集的信噪比较高,最大值为59 dB,最小值为49 dB,说明反射式激光雷达扫描图的图像质量较为优良,存在噪声较少。
5)采用本文方法时存在空洞较小,具有一定的优势。
该方法由于在数据采集时还存在一定问题,今后会针对该项缺陷继续完善该监测方法。未来的研究内容如下所示:
1)下一步可以采用LIDAR技术对山地地理环境进行多角度的激光雷达回波扫描,能够迅速获得高密度、高精度的立体点云点坐标,并在软件的支持下建立了大量的立体模型,实现了对反射式激光雷达回波特征的优化监测。
2)未来研究工作可以采用反射式激光雷达技术,对山地地理环境进行全面的数据收集,并建立了一个立体的模型,更好地体现出其形态。让整个回波特征优化监测的结构更加清晰。
3)反射式激光雷达回波特征优化监测需要更加能够迅速、有效地获得山地地理精确信息,保证勘探工程的质量,提高勘探工程的效率,在此方面未来可以深入研究。