基于PLC 和变频技术的电机调速研究
2023-10-27柳新枝罗燕杰
柳新枝,罗燕杰
(阿克苏地区中等职业技术学校,新疆阿克苏 843000)
0 引言
随着油田开发规模和程度的提高,对电力的依赖性与日俱增;随着冶金行业对节能减排要求的不断深入,应用频率控制技术成为其发展的必然方向。随着我国电子行业的迅速发展[1],以及电力系统的自动化控制技术的不断进步,频率控制技术已被越来越多地采用。实践证明,变频调速技术已广泛地用于工业领域[2]。
1 变频调速原理
旋转磁场的旋转速度,即同步转速可以从电机公式导出:
定义转子转速为p,根据电机阻力理论,推导出异步电机的转差率r:
式(1)、式(2)中,p 为转子转速;P0为磁场速度;i 为电机的极对数;g 为工频频率。
用变频调速来控制异步电机,每个磁极的磁通量都要保持不变。若降低了磁场,就会使电机的磁芯达到最大的磁通量,从而使其不能达到最大的输出。如果磁通增大,铁芯的磁通就会饱和,导致励磁电流过高,而过高的温度甚至可能损坏电机。根据式(1)、式(2),可推导出异步调速电机的转速:
其中,异步电机的极对数i 为固定值,异步电机的转速p 与工频g 成线性比例,因此只要工频改变,异步电动机的速度就可以改变。
近年来,随着半导体技术的发展和数字控制的普及,矢量控制的运用范围从高性能发展到一般的传动,出现了变频空调、冰箱、变频洗衣机等产品。因此,采用变频技术进行节电改造,有着广泛的应用价值。
2 系统建模
以自动抽油机为例进行数学建模,在此基础上应用一种基于PID 的模糊算法来实现电机的变频调速,并对其进行仿真计算。该方法能得到最优的电机工作状态,这对该模式的优化有很大的作用,并通过对比与观测得到最优结果。该方法的建立直接影响到整个系统的模拟和操作,而该传递功能则为下一步的算法控制奠定了基础。以下是导出和展示的系统模型的流程。与开环速度控制方式比较,闭环变频控制能够达到更优的稳定速度控制。
采用滑动角度转速的变频器可以达到恒定的转速,采用闭环方式可以极大改善变频器的运行效率。从电机的基本理论和机电理论来看,电机的扭矩是电机的核心参数。不计损耗的异步电机力学计算,恒值控制的异步电机机械转矩为:
其中,在定值控制下,R1/ζ1的值是固定的,式(4)可以改写为:
当电机稳定运行时,t 较小,分母中包含t 的项可以忽略,得到转矩的近似关系式:
滑动角速度可以定义为:
则式(6)可表示为:
由于电机驱动抽油机运转,具有驱动负载的性能,因此建立恒定旋转负载下电驱动系统的运动公式:
zζ/zd 表示斜率,即时角速度可以表示为ζt:
电机的实际转速可按式(11)计算:
由转差率定义和ζ1=2πg1,可以得到:
选择Y132S1-2 型三相异步电机,技术参数见表1。在电机的变频控制中,为使其结构简单,采用电机的参数,然后利用MATLAB 中的Simulink 进行仿真,得到系统的旋转关系。

表1 Y132S1-2 型三相异步电机技术参数
3 试验分析
3.1 试验准备
(1)在抽油机、变频器、电机等设备组装完成后,对系统进行软件、硬件的调试,并对系统进行试验、数据分析。首先,在实验室中进行常规的无负荷测试,对设备的各个部件进行测试。在室内进行负荷测试,对比和分析测试结果。本试验的试验台能够对电机在无负载时的速度进行有效检测。通过一个预先设定的数值,实际的速度通过一个探测设备(光电编码器)来测定,并且把该预定的数值和实际值相比较。在室内试验电机加载时,采用张力计进行载荷模拟,以张力计的数目为载荷。
(2)在温度15 ℃、湿度37%的条件下进行试验。PLC 采用西门子S7-300、MM440 变频器、3 台Y132S1-2 型异步电机、E6C2-CWZ3E 型旋转编码器。载荷采用JHYT 型油田负荷型。采用C#作为计算机编程语言,MATLAB 作为模拟工具。
3.2 试验结果
(1)在电机无负荷运转进入平稳工况的试验。在电机进入平稳工况后的实际速度变化情况见图1。可以看出,在空载工况下,由于电机自身和外界的影响,电机的运行曲线有微小波动。

图1 单位时间电机转速
(2)电机空载运行时预设值与实际值对比实验。转速从小到大(预设值:频率和转速可以相互转换),检测装置编码器反馈的转速值和误差。速度测量误差曲线如图2 所示。对两组数据进行了测试,以保证其可靠性。由试验曲线可知,最大速度偏差在4%,随着转速的逐渐增大,误差逐渐减小。
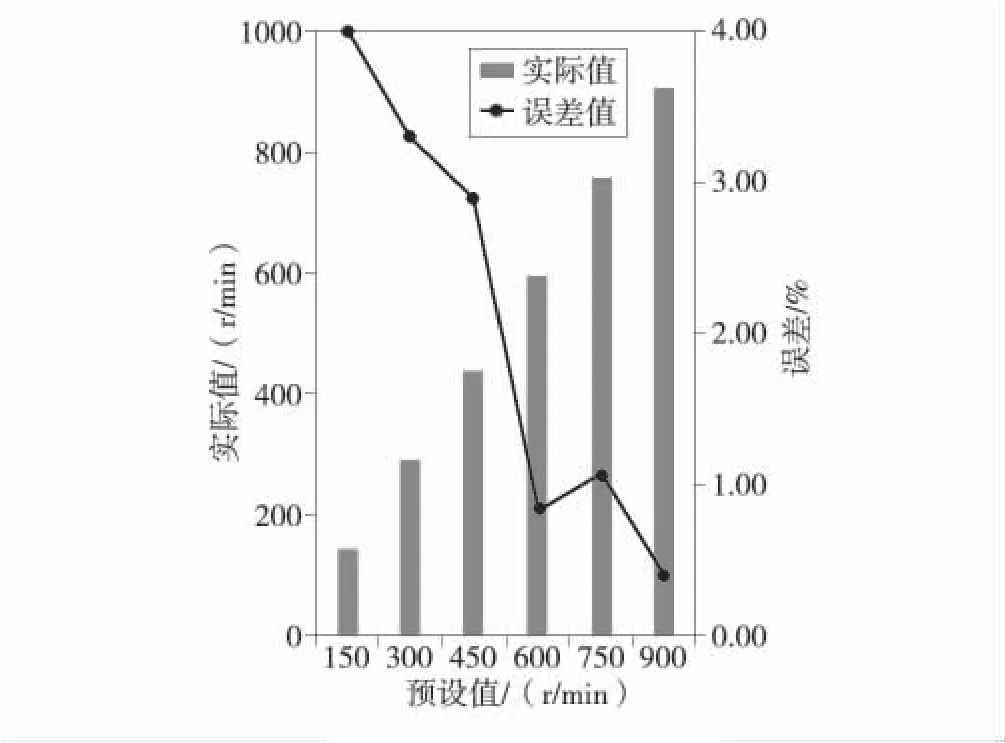
图2 速度测量误差
(3)电机空载运行时预设值与实际值的对比试验(采用Fuzzy PID 算法来进行控制)。由低至高的速度(设定的数值:可以将频率和速度互相转化),并对设备编码机的反馈进行测量。测速误差曲线如图3 所示。模糊PID 复合控制的转速误差明显减小,该方法具有较高的准确度和较高的识别度,可以达到零速度的检测。

图3 速度测量误差(Fuzzy PID 算法控制)
4 结束语
本文着重阐述了变频调速电机节能控制的实验研究、实验环境及设备选择,并对实验结果进行分析和比较。实验室试验主要分析电机的运动稳定性,空载运行时电机预设值与实际值的对比实验,并加入模糊控制实验,将恒载下电机的预设值与实验实测值进行对比,对不同负荷下的功率、转速和误差进行分析。在试验中加入了PID 模糊控制器,使其速度稳定且测量误差很低。