模块化设计的颜色参数校准实验系统
2023-10-26万志翀万国春谢丽宇
万志翀, 陈 岚, 万国春, 谢丽宇
(1.上海应用技术大学电气与电子工程学院,上海 201418;2.同济大学电子与信息工程学院,上海 201804;3.同济大学土木工程学院,上海 200092)
0 引言
车载娱乐系统不再单一的为人们提供多媒体功能的服务,而是更多地考虑结合其他驾驶信息并与乘客进行交互。汽车车载氛围灯在传统车内主要起到辅助照明的功能,随着智能座舱概念的提出,车载氛围灯承担的功能也逐渐变多。因此,如何保证每一个LED灯珠具有高度的颜色一致性是非常关键的问题[1]。
由于制作工艺的差异,同款灯头使用同样的参数点亮时,会产生肉眼可以区分的色差[2]。为此,红绿蓝发光二极管(Red-Green-Blue Light Emitting Diode,RGB-LED)颜色标定系统被提出,一个完整的颜色标定系统包括LED 参数采集和校准算法两部分[3]。测量LED参数前首先需要精准的颜色控制[4-6],最经典的是脉宽调制(Pulse-Width Modulation,PWM)控制方法[7],而后是神经网络方法[8-9]。同时,许多学者提出了一系列的校准算法[10],传统校准算法需要高成本的光电传感电路[11-12],随着机器学习算法的引入[13-14],大量的RGB-LED颜色数据需要被用来训练。
基于上述背景,本文实验旨在提供一种结合嵌入式开发、串口通信技术与LIN 总线通信原理的RGBLED颜色校准与数据采集系统。通过该实验提出的方案,研究人员可以更加便捷的获取到算法研究需要的数据,并实现对数据来源的可追溯。
1 实验系统结构
本实验的系统主要包括:自动化机械模块、颜色校准模块和数据源可追溯模块三大部分。自动化机械模块主要负责将探头与待校准LED 灯板移动到对应位置,实现整体校准流程的自动化;颜色校准模块通过LIN总线通信点亮LED,再通过颜色分析仪获取到颜色数据,经过算法计算后,基于PWM 调光方法实现对LED的颜色校准;数据源可追溯模块集成了激光打标机,对每个灯珠生成唯一的序列号,再通过序列号生成二维码,最后使用激光打标机将二维码刻到灯板外壳上。这3 个模块协同工作,实现了数据的自动采集和数据源可追溯。
1.1 伺服电动机模块
伺服电动机模块的架构如图1 所示,该模块主要负责移动搭载了RGB-LED 的PCB 标定板,捕捉颜色分析仪数据和移动LIN收发器终端连接到氛围灯的接口,通过伺服电动机驱动机械轴移动搭载对象,帮助整个标定过程实现自动化。LIN 总线是一个低成本总线,主要用于车窗、空调、氛围灯等汽车零部件,速率为20 Kb/s,工作电压在0 ~12 V 之间,抗干扰能力较强[15]。
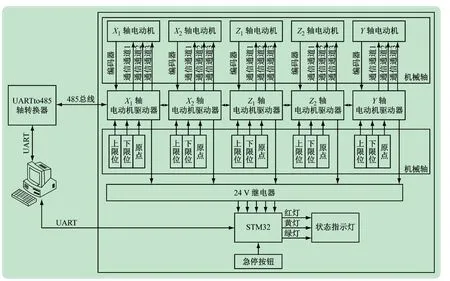
图1 伺服电动机模块架构
伺服电动机在全球的工业自动化领域中被广泛应用,通常一套伺服电动机控制系统包括驱动器,伺服电动机,导轨,PLC或PC。模块的机械部分使用了5 轴伺服电动机驱动器系统,主要包括5 台TSDA-C21B伺服电动机驱动器和对应的5 台伺服电动机(3 台SDGA-04C11AB,2 台SDGA-01C32BB)。两类电动机的区别在于后者具有刹车使能信号,可以在电动机垂直工作时防止电动机失能下坠造成严重的安全隐患。电动机控制利用STM32 与USB 转485 转换器实现。上位机通过USB-485 转换器输出两线信号,串接5 个TSDA-C21B伺服电动机,再由驱动器对伺服电动机进行控制。每个机械轴都有3 路光电开关,用于提供电动机的限位和零点信号。电动机驱动器也同样引出5个电动机的到位信号,用于判定每台电动机是否走到指定位置,并通过24 V电压驱动5 路继电器模块进行信号隔离后输入到STM32。除此之外,STM32 还外接了一个急停按钮,用于机器异常运行的紧急停止。
1.2 颜色校准模块
颜色校准模块包括LIN收发器、颜色分析仪、光电探头、待校准RGB-LED灯板。LIN收发器负责将上位机的点亮命令通过LIN通信传输标定数据并控制点亮RGB-LED灯珠。光电探头采集RGB-LED发出的颜色光数据。颜色分析仪负责分析探头采集的颜色光,转换成CIE Yxy色品坐标,最后通过串口将数据传输给上位机。RGB-LED通过PWM 的方式点亮目标色,红绿蓝3 种颜色灯珠的光通量与PWM 的占空比例呈线性关系[3]:
式中:Y′r,Y′g,Y′b分别为PWM 调光下红绿蓝3 个灯珠的光通量;Dr,Dg,Db分别为红绿蓝3 个灯珠的占空比;Yr,Yg,Yb分别为红绿蓝3 个灯珠在占空比为1 时的光通量。根据CIE标准色度系统中的三色线性关系和色度坐标与三色值的关系,可以得出RGB-LED 的混光色度坐标:
式中:Xm,Ym,Zm分别为混光颜色的三刺激值;xm为混光颜色在CIE1931 色度空间坐标系下x轴的坐标值;xr,xg,xb分别为红绿蓝3 个灯珠在占空比为1 时点亮的颜色在CIE1931 色度空间坐标系下x轴的坐标值;ym为混光颜色在y轴的坐标值;yr,yg,yb分别为红绿蓝3 个灯珠在占空比为1 时点亮的颜色在y轴的坐标值。分别为红绿蓝3 个LED在占空比为1 时的三刺激值之和。
1.3 数据源可追溯模块
实验中,需追溯数据的来源,从而寻找因果关系或判断异常状态。数据源可追溯模块的架构如图2 所示,模块包含用户上位机软件、激光打标机和灯珠LIN通信3 个主要部分。RGB-LED 灯珠是我们的待测组件,上位机发送NAD 地址获取帧和序列号获取帧,通过USB-LIN收发器将帧信号发送到RGB-LED并得到反馈数据。上位机通过这些反馈数据,给激光打标控制板发送序列号字符串和开始打标信号。控制板控制激光探头,在灯珠的外壳打印包含序列号信息的二维码。如果对某个数据存在追溯需求,只需要扫描二维码,即可获得序列号,从而找到对应的灯珠。

图2 数据源可追溯系统架构图
2 实验软件设计
软件设计包括自动化机械模块,颜色校准模块和数据源可追溯模块3 个部分。3 个模块独立运行但相互之间协同配合,实现RGB-LED 的自动化校准和数据可追溯功能。
(1)自动化机械模块。电动机移动的逻辑控制,软件流程如图3 所示,开始标定流程时,先移动Y轴电动机,当Y轴电动机到位后,移动X轴电动机,等到Y轴和X轴电动机全部到位后,移动Z轴电动机将探针放置在RGB-LED 灯板上方,当标定结束以后进行复位。复位过程中,会先将Z轴电动机上的探头抬起,当Z轴电动机上升到位后,同时移动X轴和Y轴电动机,防止损坏探针和探头,当X轴和Y轴电动机到位后代表完成了一次完整的标定流程。

图3 自动化机械模块软件流程
(2)颜色校准模块。主要是形成一个闭环的反馈修正,经过多次循环校准后,保证灯珠的颜色在标准色域内。调光方法使用目前车载氛围灯常用的PWM 调光法[5],使用的校准算法可以灵活变换,该模块的软件流程如图4 所示。
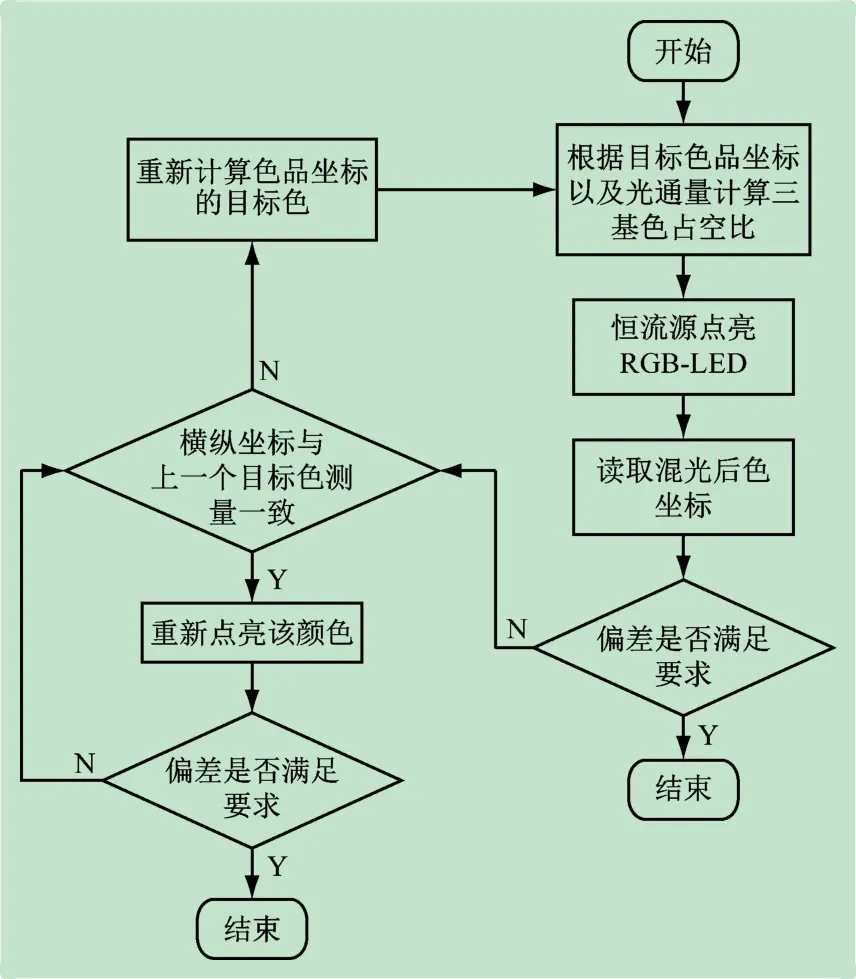
图4 颜色校准模块软件流程
(3)数据源可追溯模块。主要是通过校准时间生成唯一序列号后,读取写入在RGB-LED 灯珠内的序列号,将该序列号生成对应的二维码,通过激光打印在灯珠外壳上,实现数据的可追溯,该模块的软件流程如图5 所示。

图5 数据源可追溯模块软件流程
3 实验结果与分析
在整体实验过程中,颜色校准的精度和校准过程的速度是2 个重要的性能指标。
3.1 颜色校准
(1)颜色校准过程。首先需要测量RGB-LED 的三基色值,并依据三基色值进行后续目标色校准算法的计算。受到电流的影响,RGB-LED每个基色的亮度会不相同,以此灯为例,基色红的亮度为1190.61 lx,基色绿的亮度为3683.66 lx,基色蓝的亮度为362.70 lx。可以得出绿光亮度最高,蓝光亮度最低。因此在混光过程中,偏绿的颜色亮度会更高,偏蓝的颜色亮度会更低。
(2)目标色计算过程。需要针对不同的基色配比动态调整颜色的亮度。30 种目标色的亮度计算结果如图6 所示,20 ~30 号色偏蓝,所以亮度更低,3 ~6 号偏红色号的亮度相对偏绿色号的亮度也有所降低,符合理论预期。

图6 RGB-LED亮度自适应调节
颜色校准完成后,RGB-LED的颜色值与目标值如图7 所示。红色为目标色坐标点,绿色为校准后的颜色坐标点,30 种颜色的偏差均小于0.01,证明本实验具有良好的精度。校准后的颜色在CIE1931 色彩空间色度图的位置如图8 所示,全部目标色均在正确的位置。

图7 目标色坐标与校准后色坐标对比

图8 RGB-LED校准后的颜色值
3.2 校准速度
本实验将80 个RGB-LED焊接在PCB 灯板上,按照8 ×10 的矩阵排列。80 个RGB-LED的校准时间如图9 所示。由图可知,大部分RGB-LED 的校准30 种颜色的时间在60 s左右,平均2 s校准一种颜色。个别RGB-LED在一遍校准后,还有部分颜色无法满足目标色域,本实验最多会重复校准3 次,由图12 可见,80 个灯中只有28 号灯校准3 次才合格,34、68 和75号3 个灯校准了2 次。除此之外,灯板左下角的61、62、71 和72 号4 个灯设置焊接异常情况,无法点亮,因此校准时间为0,证明本实验可以检测出此类异常情况。
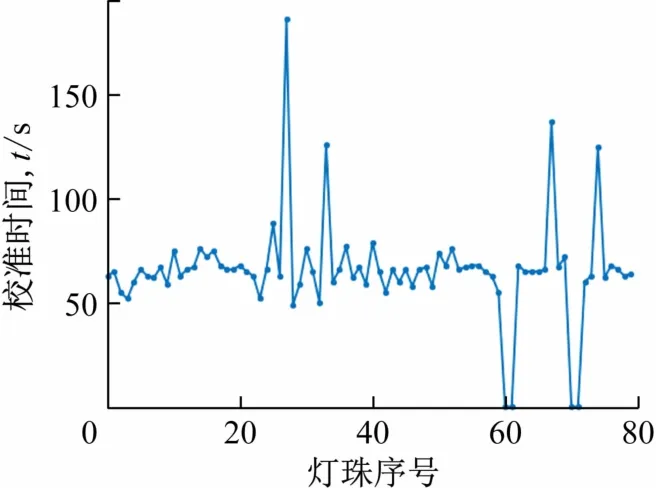
图9 RGB-LED校准时间
在校准完成后,颜色校准模块会记录RGB-LED灯珠的颜色数据,并自动记录为数据表格。这些数据表格为后续研究基于机器学习的校准标定算法提供了训练数据。在数据采集完毕后,通过激光打印二维码在RGB-LED的外壳上,扫描二维码可以得到对应的序列号。序列号的生成规则为“年(4 byte)-月(2 byte)-日(2 byte)-时(2 byte)-分(2 byte)-秒(2 byte)-通道号(2 byte)-灯ID号(2 byte)”,共计18 byte,实现数据源的可追溯功能。
4 结语
本实验构建了实验的自动化模块,实现了RGBLED颜色数据的自动化校准和数据采集,并实现对获取到的数据进行源头可追溯。通过实验表明,提出的RGB-LED颜色校准方法在CIE1931 色度空间下平均误差小于0.01,每种颜色平均校准速度达到2 s。本文提出的方法适用于包含大量重复数据采集步骤的科研项目,研究人员可以参考本文,搭建适合自己科研项目的自动化数据可追溯系统,提高科研效率。