基于沙滩车的实验教学用混合动力车设计与开发
2023-10-25薛腾飞马宗正聂建军王赛飞
薛腾飞,马宗正,2,聂建军,王赛飞
(1.中原工学院 机电学院,河南 郑州 450007; 2.河南工程学院 机械工程学院,河南 郑州 451191)
我国汽车产业发展迅速,2020年尽管受到了疫情影响,但仍产销两旺,产销量均超过了2 500万辆[1]。随着车市的迅速发展,传统燃油汽车存在的环境污染问题越来越突出,新能源汽车特别是混合动力汽车日益受到关注[2-4]。此前,我国已陆续出台政策:要加大混合动力汽车和替代燃料汽车的研发力度[5]。混合动力汽车包含传统内燃机[6]、电机控制系统[7]、电池控制系统[8]和控制策略部分[9-10]等。混合动力汽车的制造涉及学科内容非常广泛。
在本科教学过程中,要让学生更加清楚地了解混合动力汽车的工作原理,熟悉其基本结构,就必须设计合适的实验教学系统[11-13]。但是,实际的混合动力汽车体积大、购置成本高,无法让学生全程参与设计和学习,相应教学实验只是认识性的,根本达不到预期的教学效果。为弥补这一教学缺陷,本文基于现有的沙滩车,开发一款结构简单、操作方便的实验教学用混合动力车,以便通过本科教学实验提高学生的实践水平和综合应用能力。
1 总体设计方案
本文基于已有沙滩车设计的混合动力车为串联式结构(见图1)。原有沙滩车的发动机只负责给蓄电池充电。混合动力车的设计过程主要包括:电机和蓄电池的选型,减速器设计,油门控制和发动机起停控制设计,能量管理系统设计。混合动力车的基本设计参数和动力性指标分别见表1、表2。

表1 混合动力车的基本设计参数

表2 混合动力车的动力性指标
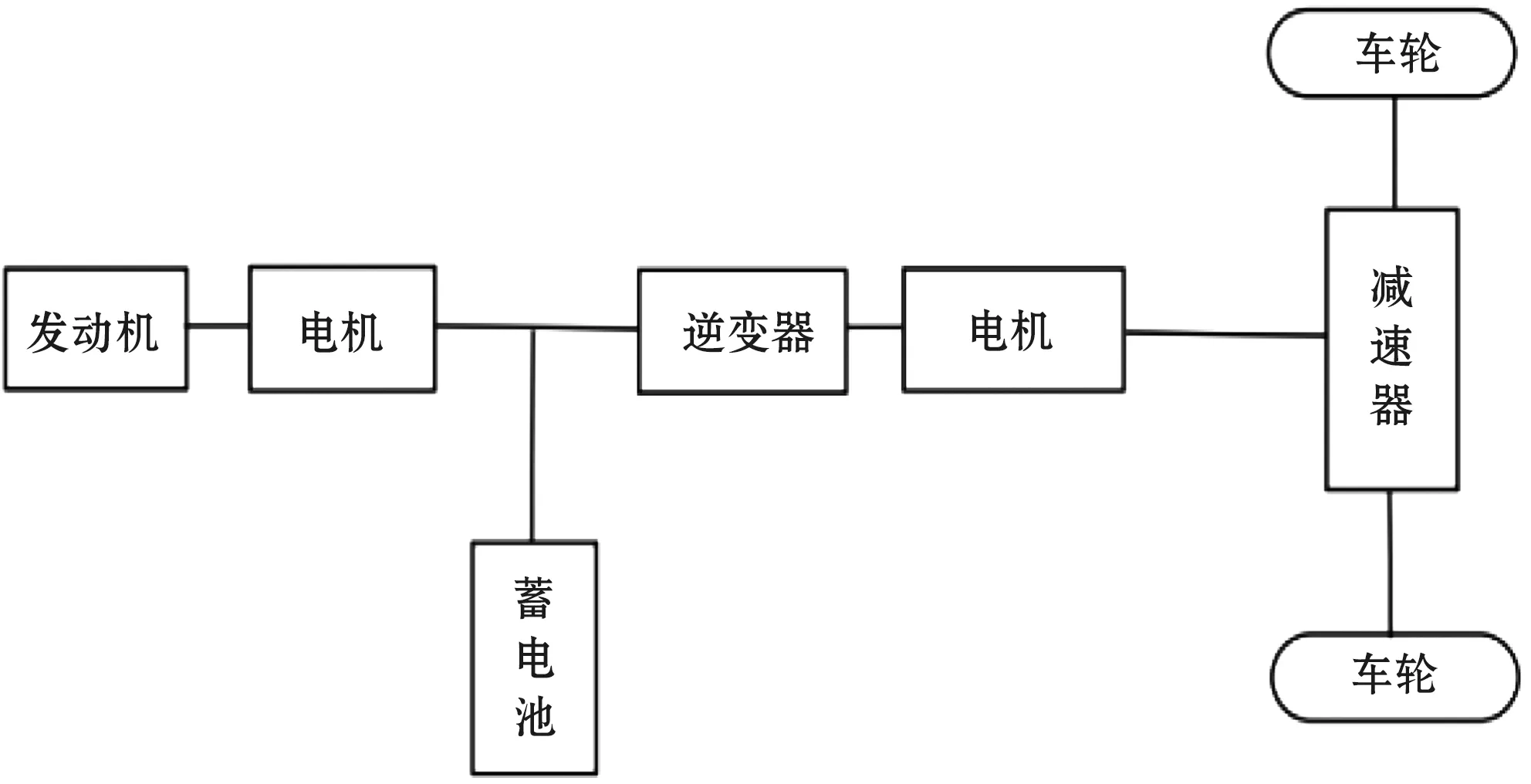
图1 混合动力车的串联式结构
2 驱动电机和蓄电池的选型
2.1 驱动电机的选型
目前,车用驱动电机大多数为永磁同步电机。永磁同步电机采用的是永磁体,不需要电子换向。其结构较简单、体积较小、效率较高,并且具有直流电机和交流电机的大部分优点。本文选择永磁同步电机作为直接驱动装置。确定电机功率时需考虑最高车速、加速性能和最大爬坡度等动力性指标。
根据给定最高车速确定的电机最大功率为:
(1)
式中:η取0.95;f取0.015;CD取0.35;A取0.5 m2。
根据加速性能确定的电机最大功率为:
(2)
式中:δ为混合动力车的旋转质量换算系数,取1.1;dt为设计过程的迭代步长,通常取0.1;vm为混合动力车加速末的速度,取40 km/h。
根据最大爬坡度确定的电机最大功率为:
(3)
式中:vi为混合动力车爬坡时的速度,取5 km/h;αmax取值30%,转换成的角度为16.7°。
根据计算结果综合考虑认为,驱动电机的最大功率Pm应不小于1.30 kW。参考原有沙滩车的各项参数及改装后的计算参数,本文选用最大功率Pm为1.5 kW、最高转速nm为5 500 r/min的永磁同步电机作为驱动电机,据此确定合适的电机控制器,并在原来的油门位置装上了电机调速把手。
2.2 蓄电池的选型
目前电动汽车上使用的蓄电池有铅酸电池、镍氢电池及锂离子电池等。本文选用锂离子电池作为混合动力车的车载电源。
在纯电动行驶的情况下,蓄电池组输出的功率应满足驱动电机以及车辆附属电动装置的功率需要,即
(4)
式中:PB为蓄电池组的最大放电功率,kW;ηB为蓄电池组的放电效率,可取0.95;Pa为附属电动装置的功率,一般取0.01×Pm,单位为kW。
计算可得,PB≥1.68 kW。综合考虑后,本文取PB=1.8 kW。
蓄电池组在正常工况下的总能量必须满足混合动力车的设计需要。设计中可按照车辆以最高车速50 km/h匀速行驶40 km的要求,计算所需蓄电池组的能量W0,即
(5)
式中,S为混合动力车以纯电动持续行驶的最大里程,km。
计算可得,W0为2.06 kW·h。本文取W0=2.1 kW·h。
蓄电池组的电压应在整个混合动力车电力系统的限制电压范围内,即蓄电池组电压等级与所选驱动电机的电压等级一致。蓄电池组的容量为:
(6)
式中,UE为蓄电池组的电压,V。
本文根据现有的蓄电池资源,选用单体工作电压是1.2 V的锂电池,并将50个单体串联成一组,两组并联在一起,构成蓄电池组。蓄电池组的最高电压为60 V,相应的蓄电池组容量不低于35 Ah。考虑到汽车附属电动装置的能耗,最终确定的蓄电池组容量为36 Ah。
3 减速器的设计
驱动电机的输出转速很高,不能直接用于驱动车轮,而需要通过减速器进行减速。
根据最高车速vmax、驱动电机最高转速nm、轮胎滚动半径r,可计算最小传动比imin。其计算式为:
(7)
当r=0.228 m、nm=5 500 r/min、vmax=50 km/h时,可算得:imin=9.46。
当两级齿轮的配对材料和齿宽系数均相同、齿面硬度≤350 HBS时,高速级传动比为:
(8)
低速级传动比为:
(9)
式中,i0为主减速器的传动比,本文取10.03。
通过计算,齿轮1的参数为:Z1=16齿,m1=1.38 mm,β1=16°,α1=20°,b1=16 mm。齿轮2的参数为:Z2=52齿,m2=1.25 mm,β2=16°,α2=20°,b2=10 mm。齿轮3的参数为:Z3=23齿,m3=1.50 mm,β3=13°,α3=20°,b3=15 mm。齿轮4的参数为:Z4=71齿,m4=1.50 mm,β4=13°,α4=20°,b4=12 mm。
4 油门控制与发动机起停控制设计
4.1 油门控制
在现有沙滩车装有节气门拉线的基础上,可采用步进电机加弹簧杠杆装置,并将其与油门拉线相连,对油门进行控制。油门控制的原理如图2所示。
赣州恩菲渗沥液处理站是中国恩菲自主设计、自主集成、自主研发并自主调试的渗沥液全回用项目,设计处理规模300 t/d,采用“竖流沉淀+调节池+厌氧+二级硝化反硝化+膜生物反应器MBR+纳滤NF+反渗透RO+浓缩液减量装置”处理工艺,处理后的出水达到工业循环冷却水回用水质标准。
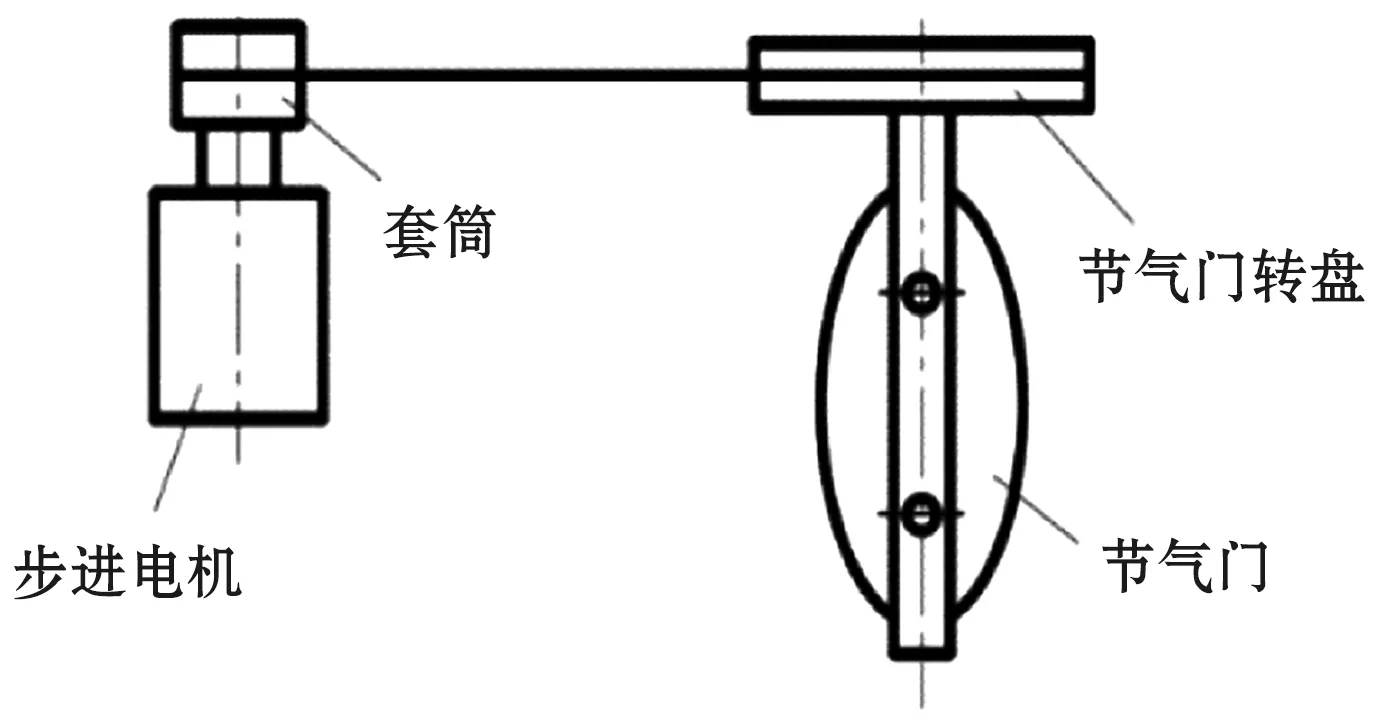
图2 油门控制原理示意图
用于油门控制的步进电机采用ULN2003芯片来驱动。该芯片含有7对并联的NPN型达林顿管,可以承受较大的电流。它本身就相当于一个电压放大器,恰好能满足油门控制的电路设计要求。步进电机的驱动电路如图3所示。

图3 步进电机的驱动电路
步进电机是根据相序进行控制的。它通过判断方向信号(Direction,DIR)的值来确定转向,当DIR=1时电机正转,当DIR=0时电机反转。步进电机的控制流程如图4所示。

图4 步进电机的控制流程
4.2 发动机起停控制
发动机起停控制是基于转速信号控制起动继电器并通过点火装置来实现的。发动机起停控制需要两个继电器。其中,一个继电器连接在发动机的起动机线路上,当能量管理系统要求起动发动机时吸合,当转速高于2 000 r/min时断开;另一个继电器连接在发动机的点火线圈上,当能量管理系统输出停机信号时断开,当转速降到0时吸合。
5 能量管理系统设计
5.1 系统框架
能量管理系统用于采集蓄电池组的电压、电流和温度数据,估算蓄电池组的荷电状态(State of Charge,SOC),进而控制蓄电池组的充电过程。同时,该系统也将油门控制和发动机起停控制整合到了一起。混合动力车的能量管理系统由采集电路、主控电路和驱动电路三部分组成(见图5)。其中,采集电路通过配置芯片的引脚、系统时钟、可用中断方式以及电可擦除只读存储器(Electrically Erasable Programmable Read-only Memory,EEPROM),能准确采集蓄电池组的电压、电流和温度数据;主控电路利用控制器的输入/输出端口,能够将电压采集模块和电流采集模块采集的数据传送至A/D转换口,把模拟信号转换成数字信号,并能通过数据处理估算出蓄电池组的SOC;驱动电路用于节气门及发动机的起停控制。
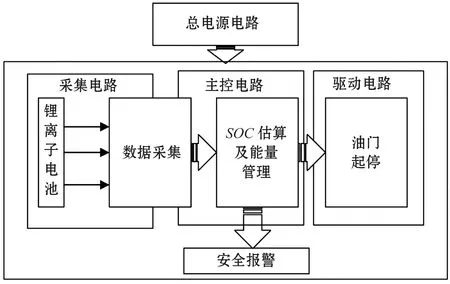
图5 混合动力车的能量管理系统框架
5.2 SOC估算方法
SOC估算是能量管理系统设计的重要内容。常用的SOC估算方法主要有5种。本文是将开路电压法和安时积分法结合起来进行SOC估算的。
(1) 开路电压 (Open Circuit Voltage,OCV) 法。它主要是通过测量蓄电池组的电压,参考曲线图进行SOC估算的。在估算前要进行实验,记录放电过程的有关数据,确定OCV与SOC之间的关系曲线。将该关系曲线输入系统,通过对比可估算SOC[14]。
(2) 放电测试法。该方法需要让蓄电池组按恒定电流连续放电至终止电压。其缺陷在于:耗费时间较多;只适用于静态蓄电池组;测试条件严格,需恒定电流。
(4) 模糊逻辑法。它属于一种模糊推理方法,是根据信息库中的大量信息进行估算的,需要基于大量的生活经验和理论知识进行抽象概念的建模。
(5) 卡尔曼滤波法。它是一种比较先进的SOC估算方法[16]。该方法相比于其他方法,估算的SOC更准确,但是运算量偏大,且对软硬件的要求较高。
5.3 系统控制流程
能量管理系统以STC89C52单片机作为主控制器,且采用的是C语言编程方式。混合动力车能量管理系统的控制流程如图6所示。能量管理系统初始化后,首先采集开路电压信号,基于安时法对SOC进行估算,通过判断当前电量来确定是否起动发动机进行充电,如果SOC大于10%,就采集电流信号并继续进行估算;当SOC小于等于10%时开始起动发动机,在转速达到2 000 r/min时,驱动电机停止工作,用发动机充电,同时循环采集电流信号并估算当前的SOC;当SOC大于95%时,通过控制点火装置使发动机停止工作。
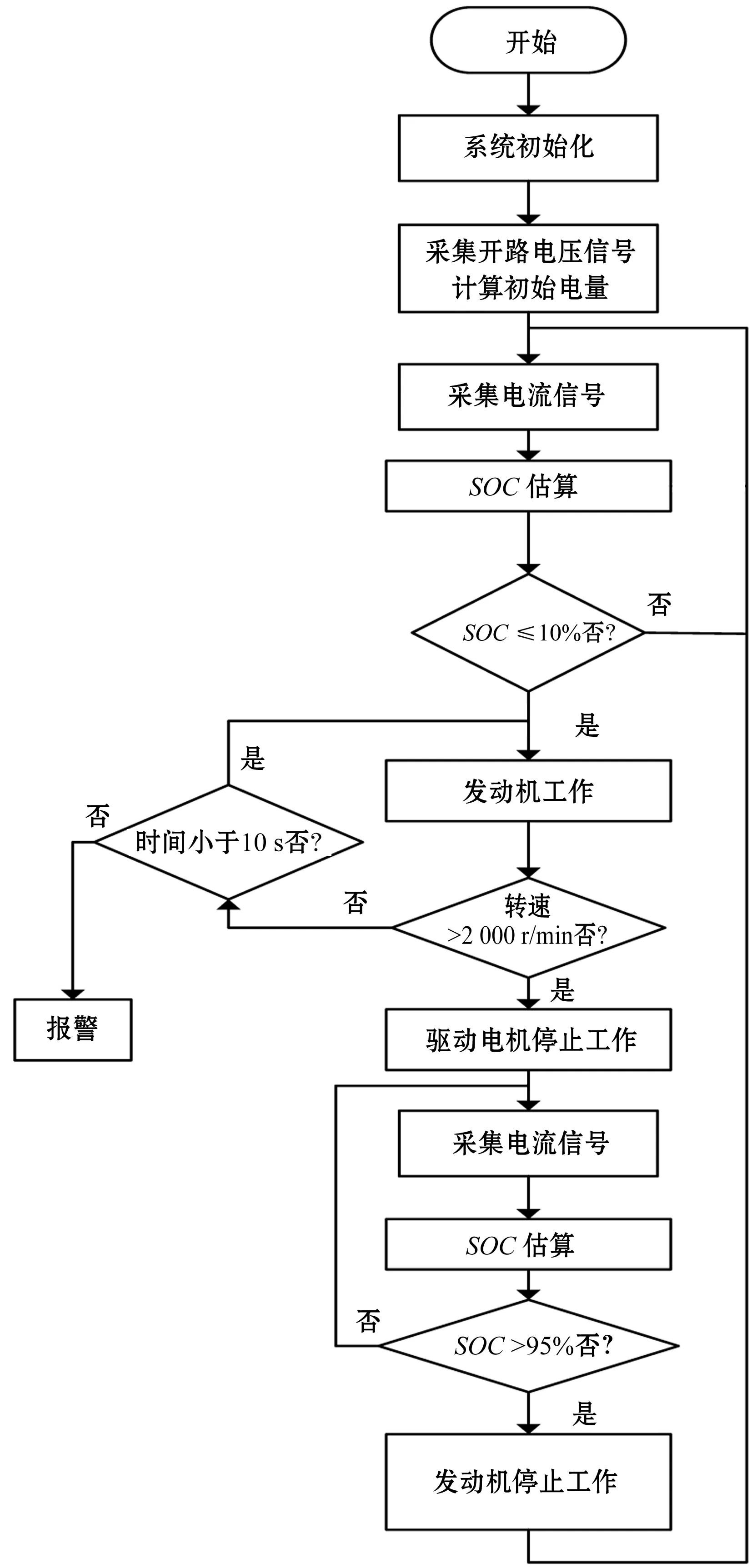
图6 混合动力车能量管理系统的控制流程
6 实际测试
完成电机和蓄电池的选型、减速器设计、油门控制与发动机起停控制设计、能量管理系统设计后,组装可得图7所示的实验教学用混合动力车。在完成组装后,本文进行了相关测试。由于爬坡度测试需要满足要求的坡道,因此受条件所限,这里只对实验教学用混合动力车的加速和续驶能力进行测试。

图7 实验教学用混合动力车实物照片
6.1 加速过程测试
混合动力车加速过程的测试结果如图8所示。计算可得:混合动力车加速过程的加速度为4.08 km/h2,车速从0到40 km/h的加速时间为9.8 s。
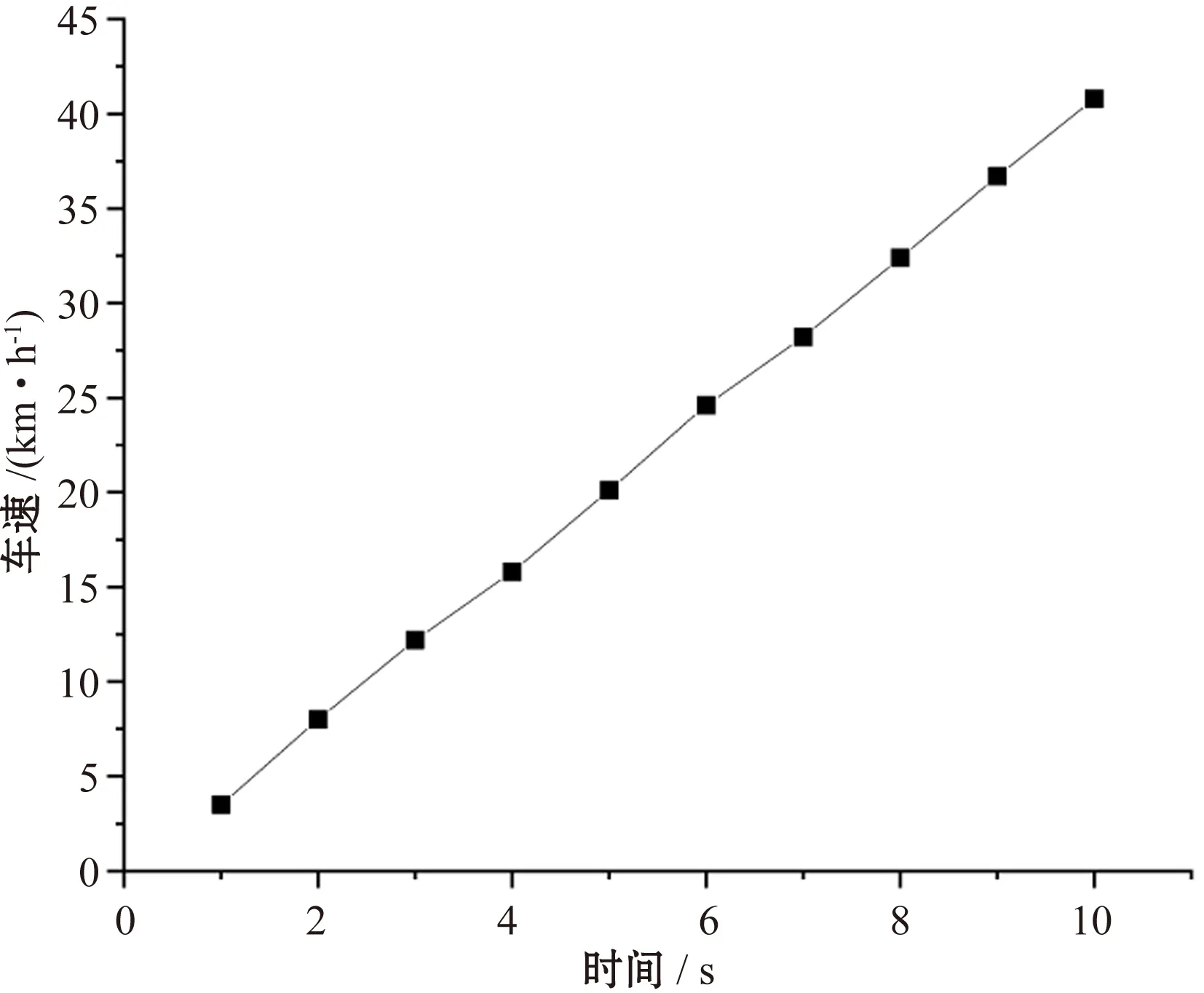
图8 混合动力车加速过程的测试结果
6.2 匀速运行时蓄电池组的电量测试
为了测试混合动力车匀速运行时的蓄电池组电量,本文在外部充电使其电量达到电池容量的100%后,让其以约 50 km/h 的速度匀速运行;当蓄电池组的电量低于5%时,混合动力车不再运行。混合动力车匀速运行的蓄电池组电量测试结果见表3。

表3 混合动力车匀速运行的蓄电池组电量测试结果
由表3可算出,所设计实验教学用混合动力车充满电后能够连续运行的时间为1.91 h。
6.3 分析
理论上,当混合动力车匀速运行时,其运行时间为:
t理=W0/Pm′
(10 )
混合动力车以50 km/h的速度匀速运行时,Pm′≈0.95 kW。计算可得:在所需蓄电池组能量W0为2.1 kW·h时,t理≈2.21 h。
可见,实测结果比理论值略低,原因是测试结束时蓄电池组还有5%的电量,从保护蓄电池考虑,测试未再继续。
7 结语
本文以开发一款能够用于实验教学的混合动力车为目标,基于现有沙滩车,通过驱动电机、蓄电池的选型,减速器设计,油门控制、发动机起停控制和能量管理系统的设计,实现了开发目标。经实际测试,该混合动力车能够实现预期效果,在实践教学中发挥良好的辅助作用。
