基于模糊C 均值聚类的驾驶风格在线辨识方法研究
2023-10-25孙晓鹏李传友郑大伟刘玉博
赵 朕, 孙晓鹏, 李传友, 郑大伟, 刘玉博
(潍柴动力股份有限公司, 山东 潍坊 261061)
驾驶风格是驾驶员长期以来养成的驾驶习惯,其中一些驾驶行为与燃油经济性和行车安全性紧密相关,通过对油门、车速等信息进行特征提取,实时识别不同驾驶员的驾驶风格,可以及时修正挡位,在满足驾驶安全性的同时尽量降低燃油量。
近些年来,众多学者针对驾驶风格辨识课题提出了先进方法。如张雅丽等[1]提出了一种基于K-Means聚类的驾驶风格识别方法,能够把驾驶风格分成3类,这类方法依赖经验定义风格类型导致可靠性较差;杨建军等[2]提出了一种基于模糊C均值聚类的驾驶风格识别方法,实现了对驾驶风格数据库的合理分类,这类方法引入了隶属度的概念,提高了辨识准确性和可靠性;马跃等[3]提出了一种基于BP神经网络的驾驶风格在线识别系统,在保证识别精度的前提下实时辨识驾驶风格。
考虑到工程化应用问题,本文提出一种基于模糊C均值聚类建模训练,搭配一种新的滚动存储计算方法进行车端在线辨识,最终通过建模和仿真验证了该方法的有效性和实用性。
1 驾驶风格辨识方法
1.1 数据预处理
首先选取市区或城郊道路工况下的不同驾驶员的实车驾驶数据作为起步工况驾驶风格辨识的样本数据,同时选取高速公路行驶数据作为高速巡航工况的样本数据。每一位驾驶员选取10个样本,其中每个样本包含3600s左右的驾驶循环数据,采集车速和油门踏板开度信号,采样周期为0.01s。
对数据的处理,首先通过车速和油门踏板开度计算加速度和冲击度,并进行滤波处理,然后将建模样本拆分成5s一个片段,分别计算每个片段内的车速均值、加速度均值,通过设置阈值的方式标记起步片段和高速片段,连续两个相同标记片段组成一个10s的有效样本,对于起步和高速的有效样本分别选取不同的特征参数。其中,起步工况选取平均加速度、加速度标准差、+冲击度均值、-最小冲击度、冲击度标准差、油门踏板开度均值、油门踏板最大开度共7个特征参数;高速工况选取踏板开度标准差、+踏板变化率均值、-踏板变化率均值、踏板变化率标准差共4个特征参数。
1.2 驾驶风格离线建模
首先将数据预处理得到的有效样本标准化处理,然后将处理后的数据矩阵用模糊C均值聚类算法建模。模糊C均值聚类算法的本质思想是不断更新聚类中心及各样本属于各簇的隶属度,最终使目标函数最优,同时将样本数据分为多个样本簇。模糊C均值聚类算法的步骤如下[4]。
1) 用随机方法对数据集中的每个样本进行初始化,得到样本属于各簇的隶属度,组成隶属度矩阵。
2) 计算并更新各簇的中心,聚类中心计算公式如下:
式中:f——样本模糊程度;n——样本数目;pij——样本j属于簇i的隶属度。
3) 计算并更新样本的隶属度矩阵,对某样本属于某一簇的隶属度计算如下:
式中:dij——聚类中心i与样本j的距离;duj——聚类中心u与样本j的距离。
4) 设置算法循环结束的条件,通过设置阈值判断算法是否收敛,若满足条件则结束迭代,若不满足条件则返回步骤2),继续更新模型参数,直至算法收敛。
利用模糊C均值聚类算法获得聚类中心和隶属度矩阵后,把每一个样本的隶属度最大的簇定为该样本所处的簇,计算每一簇内样本的平均特征参数,通过平均特征参数大小判断每一簇代表的风格类型。表1代表高速工况聚类个数为2的情况,明显看出第1簇平均特征参数值都较大,代表其包含激进型驾驶片段较多,而第2簇代表包含温和型驾驶片段较多。

表1 各簇的平均特征参数
1.3 驾驶风格在线辨识
驾驶风格在线辨识方法就是根据建模得到的一些参数实时判断当前驾驶风格的方法。离线建模需要提供给在线辨识的输入量是每一簇的聚类中心、风格标签、用于标准化处理的均值和标准差以及聚类个数,其它输入参数是实时采集的车速和油门踏板开度信号值。
驾驶风格建模与辨识流程如图1所示,辨识部分与建模部分的数据预处理步骤相似,不同之处是在线辨识通过Simulink模型实时计算的方式代替离线方法中先存储再计算的方式得到特征参数。本文采取的具体方式是实时计算10s内的特征参数,在识别到起步工况或高速工况时记录下来,并最终对多个相同工况的特征参数取均值,使用滚动存储的方式求最近10个相同工况的均值,将该结果标准化处理后与聚类中心求欧氏距离,最终得到测试样本对于每一簇的隶属度,并输出隶属度对应的风格标签。
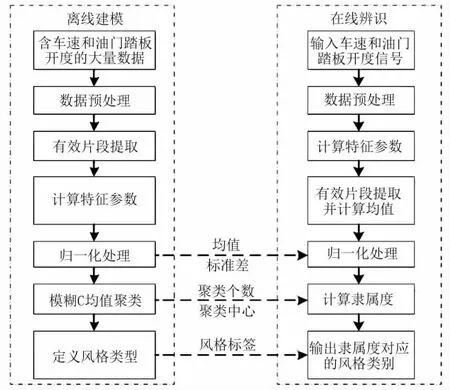
图1 驾驶风格建模与辨识流程图
2 仿真与验证
2.1 模型搭建
由于计算量和存储量较大,基于模糊C均值聚类算法的离线建模部分通过编写MATLAB脚本实现,驾驶风格在线辨识部分通过Simulink模型搭建完成,其中利用Stateflow进行数据存储和迭代计算,输入离线建模得到的结果和车速油门信号,就可以得到当前实时驾驶数据属于每一簇的隶属度以及最终风格类型辨识结果。
2.2 仿真结果
通过模糊C均值聚类算法对2位驾驶员的20组起步工况驾驶片段进行聚类,聚类个数设置为2,经聚类得到隶属度与特征参数关系曲线如图2所示,当特征参数的绝对值越大时,簇1的隶属度值越大,即簇1相对于簇2包含激进样本更多。

图2 隶属度与特征参数关系曲线
由于在线辨识的结果会逐渐收敛,即在不更换驾驶员的情况下,驾驶风格的辨识结果不会因个别的驾驶片段而改变,因此以1h后的在线辨识结果作为在线辨识准确性的判断,驾驶风格辨识结果见表2。其中,Agg代表激进型,Gen代表温和型,驾驶员1的90%测试样本显示其驾驶风格是激进型,驾驶员2的70%测试样本显示其驾驶风格是温和型。更换特征参数后,用同样的方法对高速工况驾驶数据进行风格辨识,对两位驾驶员的驾驶风格区分度高达90%,因此可以验证该方法对驾驶风格辨识的准确性和有效性。

表2 驾驶风格辨识结果
3 结论
本文提出的基于模糊C均值聚类的驾驶风格在线辨识方法可以有效地将不同类型的驾驶风格分辨出来,实时传递到车端,并以此为基础修正挡位,减少非必要地频繁换挡,提高燃油经济性。该方法利用Simulink建模,节省存储空间,具备计算量小、实时性好等优势。
