新型柔性三维力触觉传感器的设计与研究*
2023-10-25秦冲
秦 冲
(1.河南科技大学 应用工程学院,河南 三门峡 472000;2.三门峡职业技术学院汽车学院,河南 三门峡 472000)
0 引 言
目前,对于仿人灵巧手的研究吸引了较多的关注,通过手势的模仿来完成特定的操作,有助于降低控制难度[1]。尽管市场中已经出现了一些仿人灵巧手,然而也存在不足问题,缺乏触觉感知能力,难以达到更高的交互要求。
人体皮肤除了对外部刺激做出响应之外,同时可以对剪切力以及正向力进行识别,在此基础上做出一定的反馈[2]。根据上述原理,针对仿人灵巧手进行改进设计,利用特定的传感器进行手势调整,提高了物品抓取的精度和效率。所以有必要对触觉传感器进行深入研究,提升其对外部信息的感知能力,从而改善灵巧手的交互性,使其在实际交互和控制场景中发挥更佳的作用[3]。当前该类型的触觉传感器在多个领域中凸显出实用价值,例如在假肢设计[4]、康复治疗[5]、手术机器人[6]等场景中具有良好的应用前景。
随着研究的深入,已经形成了多种类型的产品,常用的可以划分为电容式[7]、电阻式[8]、光学式[9]、电磁式[10]和压电式[11]等。各种类型的传感器在原理以及适用性等方面存在显著的差异性。电阻式柔性压力传感器在应用中显示出一定的优势,例如结构复杂度较低,显示出良好的灵敏度等,更重要的是能够同步感知剪切力与正向力[12]。很多学者在此领域进行了研究,其中,Wang Y C等人[13]在设计的触觉传感器采用了导电橡胶,并将其运用到了机械臂中,在各个方向的灵敏度不同,对于x,y,z 轴的灵敏度分别是0.471,0.466,0.201,单位均为V/N。Zhang J 等人[14]在研究中成功设计出一种灵敏度较高的柔性触觉传感器,在该产品中利用了还原氧化石墨烯(reduced graphene oxide,rGO)薄膜和聚二甲基硅氧烷(polydimethylsiloxane,PDMS)阵列。受到rGO/PDMS 变形的影响,使得rGO 薄膜、电极的接触面积发生变化,由此提升了检测的灵敏度,压力处于0 ~225 Pa时基本可以达到1.71 kPa-1的灵敏度。
柔性三维力传感器在灵敏度以及量程上往往存在一定的矛盾问题,二者难以同时达到较高的要求,例如在传感器的灵敏度较高时,则量程往往较低。正是由于存在该问题,导致其应用受到了一定的限制。
在本文研究中针对上述问题进行了分析,并设计了一种新型的压阻式传感器,在设计过程中利用了多壁碳纳米管(multi-walled carbon nanotubes,MWCNTs)以及PDMS纳米材料,在各个方向的灵敏度较高,同时测量范围较大。在灵巧手中集成该传感器的应用效果较好,可以实现自适应抓取的功能,同时比较柔和、安全,应用的潜力较大。
1 柔性三维力传感器
1.1 传感器的工作原理
针对柔性三维力传感器的基本原理进行分析,具体结构如图1所示。
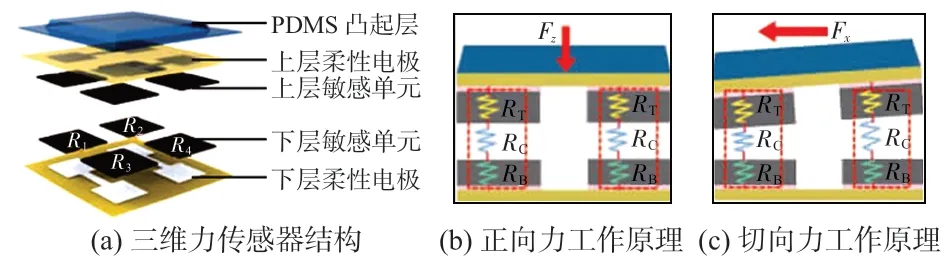
图1 柔性三维力传感器的结构和工作原理
根据图1(a)可知,整个传感器可以划分为5 层,包括顶部PDMS凸起层、上下层敏感单元、上下层PET 衬底柔性电极。其中,PDMS凸起层主要用于实现对外力的传输,由此改变传感单元的电阻,本质上一个预制的四棱台,边长6 mm。传感器中含有4 个传感单元,通过上下层PDMS/MWCNTs薄膜形成,各个单元的边长均为2 mm,对应的阻值依次是R1,R2,R3,R4。如图1(b)所示,其中,RT,RB分别代表上、下敏感层的电阻,而二者之间的接触电阻表示为RC,这3部分提供了传感单元的电阻,阻值会受到压力的影响,二者呈负相关,即随着压力的增加而减小。结合上述分析可知,在压力较小的情况下,RC决定对于传感器电阻的影响较大,由此可以提升其灵敏度。但是在压力较大时,RC难以形成显著的变化,此时RT与RB决定共同影响传感器的电阻,从而有效提升了检测的范围。如果只是将正向力施加在凸起层,则传感层会受到一定均匀力,具体如图1(b)。受到正向力(Fz)的影响,传感单元的电阻会出现变化,二者呈负相关,各个单元的输出变化趋势基本是一致的。如果在凸起层表面施加x 轴切向力(Fx),则各个电阻的变化趋势不同,根据图1(c)可知,Fx形成的扭矩对于各个电阻的影响不同,导致R1和R2降低,R3和R4增大。另外,y轴切向力相对于x轴在原理上基本是一致的。
1.2 传感器的工艺流程
图2为传感器的工艺流程以及对应的实物。其中,在图2(a)中展示的是一种丝网印刷工艺,由此可以形成阵列化的单元,使得传感器具备了较好的一致性[15]。在工艺中需要先制作柔性电极,主要是在PET衬底设置导电银浆丝网,通过这种方式得到的电极满足了柔韧性的要求。在上述工艺结束之后,分别在电极底部和顶部位置印刷PDMS/MWCNTs纳米复合溶液。然后,针对上、下两部分进行有效的粘合,在此基础上安装PDMS凸起层,从而达到封装的相关要求。
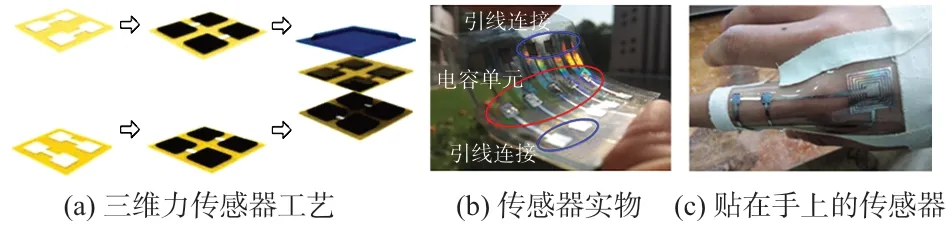
图2 传感器的工艺流程和实物
1.3 传感器的性能表征
针对传感器的性能进行表征,基于电阻分压式测试电路,在描述电阻变化时利用电压变化量。在本文研究中的电压(V)、电阻(R)以及初始电阻(R0)存在一定的相关性,具体为:V =(R-1-R0-1)/R0-1。图3(a)主要描述各个电阻的输出电压(V1~V4)和z轴受力的相关性。根据图中的信息可知,处于0 ~3 N 之间时,接触力的变化导致电阻输出电压改变,二者呈正相关,灵敏度为3.1 V/N。图3(b)为迟滞曲线,根据图中的信息验证了在迟滞性上可以达到的效果。结合图3(c)、(d)中的信息可知,如果将切向力施加在x,y轴中,则各个单元的输出电压变化不同,增大和减小的均为2个。根据图3(c)可知,如果正向力为1 N,则Fy增大时,导致各个电阻的输出电压变化不同,即与R1、R2的输出电压呈正相关,与R3、R4则呈负相关。根据上述结果可知,该传感器的灵敏度较高,价格相对较小,应用到灵巧手中具有一定的实用性。
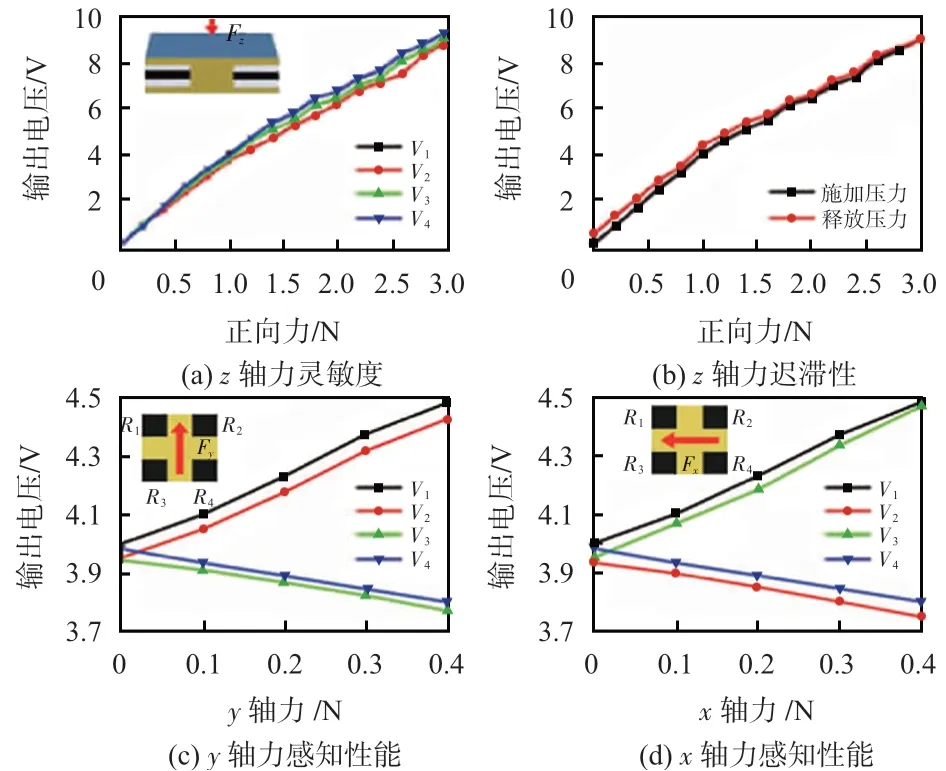
图3 传感器的三维力感知性能
2 人机交互演示实验
2.1 三维力解耦实验
结合之前的分析,将不同的作用力施加在传感器中会导致传感单元输出电压的改变,并且变化趋势有所不同。其中,施加x,y轴力时,则有2 个单元的输出电压变化,另外2个无变化;而在施加正向力时,则各个单元均变小。三轴力导致的总电压改变表示为Vz,Vx,Vy,与输出电压V1,V2,V3,V4之间依然具有一定的关系,具体公式如下所示
基于上述分析可以得到Vz,Vx,Vy,即为各个轴的输出电压。根据上述结果可知,受到外力影响时,三轴力的输出电压灵敏度较高,可以通过拟合线的斜率进行表示。进一步针对各个方向的灵敏度进行检测,发现在x,y 轴方向是基本是一致的,即为1.8 V/N,而对于z 轴在0 ~3 N 内为3.1 V/N。结合上述分析可知,本文设计的柔性三维力传感器在灵敏度上具备了一定的优势,主要体现在切向力(0 ~0.4 N)、正向力(0 ~3 N)感知上,如图4所示。
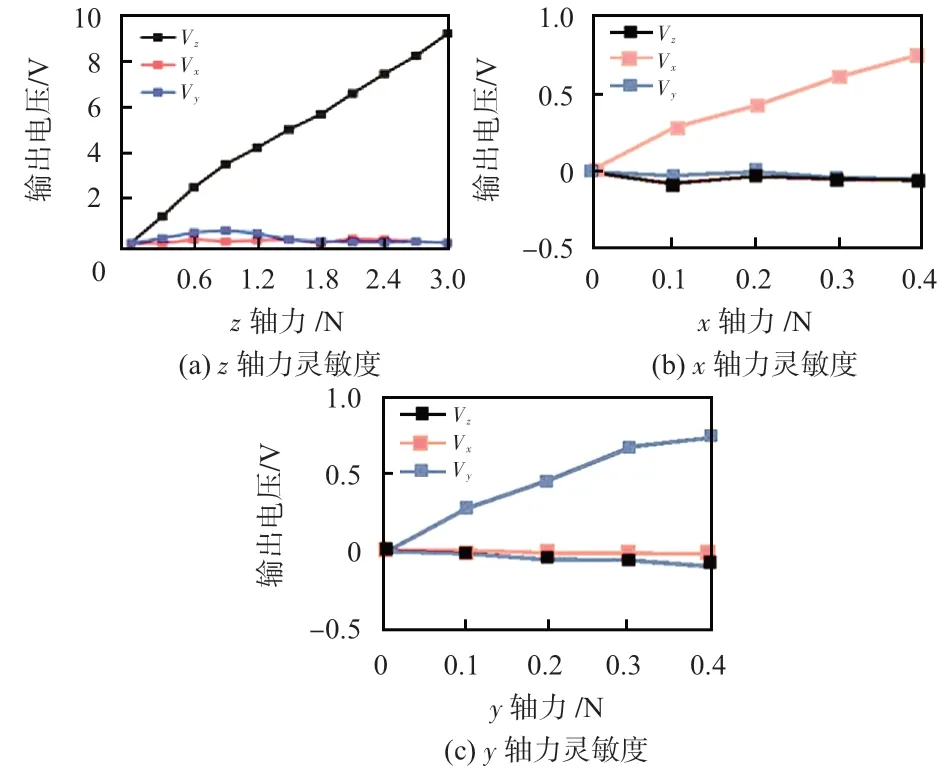
图4 传感器的三维力解耦
图5为三维力的标定平台。需要在三轴移动平台中设置ATI NANO 17,量程与分辨率依次是0 ~15 N、0.003 15 N。考虑到传感单元的要求,需要将ATI NANO 17 与长方形树脂(长30 mm)进行连接。在设置完成之后开始进行实验,并测定外力大小以及输出电压。
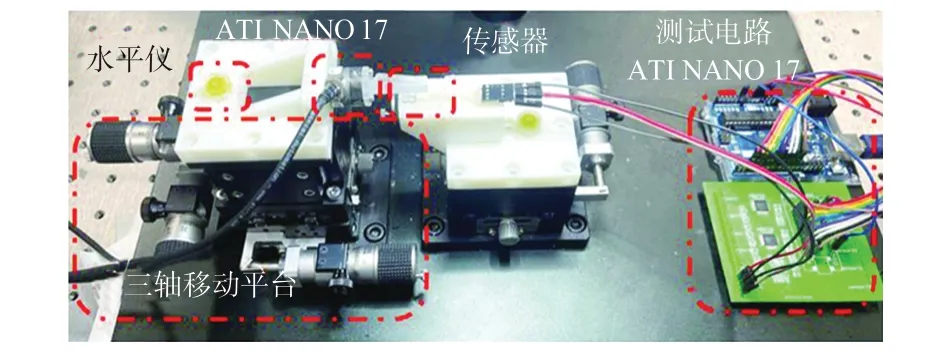
图5 三维力标定平台
2.2 安全抓取实验
在本文研究中进行了安全抓取实验,通过触觉传感器对灵巧手的抓握力进行有效控制,使其运行过程中保持安全和稳定,抓取过程如图6。其中,图6(a)为抓取力由小到大的变化过程。根据图可知,在抓取力为0.9 N时,抓取的纸杯基本未出现显著的变化,形状依然稳定。然后逐步提高抓取力,在达到1.9 N 的情况下,纸杯开始出现形变,但变化幅度总体较小。继续增大抓取力,在达到2.7 N时,纸杯形变幅度显著增大,已经无法恢复,可能会损坏被抓取的物品。图6(b)为整个过程中的抓取信号,根据图可知,整个三维力传感器可以达到较高的灵敏度要求。结合上述分析可知,设计的灵巧手在触觉传感上的能力较强,灵敏度较高,抓取的过程比较柔和,即使是抓取易变形的物品也能够保持较高的稳定性。

图6 仿人灵巧手安全抓取过程和抓取信号示意
2.3 自适应抓取实验
在实验过程中需要先搭建基本的实验装置,此次实验中利用了传感器、水瓶以及灵巧手,具体如图7 所示。图7(a)为施加切向力的信号,由此可以确定人手的动作趋势,即需要接到杯子,然后可以将杯子方可来完成对应的操作。图7(b)为向下切向力的检测信号,检测到该信号后并确定该力和重力的方向是相同的。此时通过控制来提高抓握力,避免杯子掉落。根据图可知,在检测到z 轴力变大时,增大抓取力,防止滑落。
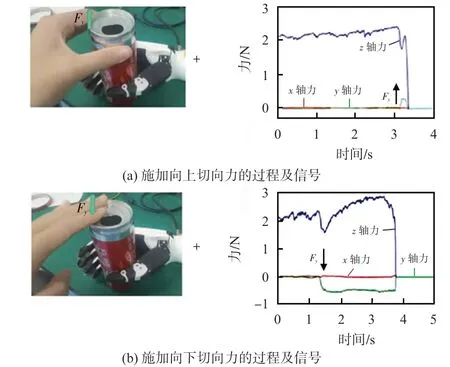
图7 仿人灵巧手自适应抓取过程及信号示意
3 结 论
在本文研究中设计了一种新型的柔性三维力触觉传感器,利用PDMS/MWCNTs材料,将其应用到了灵巧手中可以对切向力以及法向力进行有效地检测,从而实现控制的目标。通过实验验证了该传感器的应用效果,能够对纸杯与水瓶进行有效地抓取,具备了自适应抓取的能力,因此该传感器具有一定的实用价值,适合于应用到工业以及医疗机器人设计等领域中。
