固态激光雷达输电线路实时建模及压缩技术
2023-10-24李继辉廖云杰王鸿飞杨生兰
李继辉,廖云杰,邬 剑,王鸿飞,刘 玮,杨生兰
(国网四川省电力公司超高压分公司,四川 成都 610036)
1 引 言
输电线路是电网的重要组成部分,也是维持国计民生的重要基础设施。国家电网部门需要定期对输电线路进行巡检以消除各种安全隐患[1]。传统的人工巡检方式效率低下、操作危险、工人劳动强度大。近年来,基于激光雷达的自动化巡检方式逐渐代替人工巡检[2]。输电线路巡检主要包括以下方面:电路危险距离判断[3]、导线弧垂及风偏角测量[4]、输电走廊三维可视化[5-6]等。而输电线路三维重建技术是上述应用的基础,因此,开发一种高精度输电线路实时建模技术具有重要的研究意义。
近年来,三维激光扫描技术不断发展,相较于传统建模技术而言,该技术凭借其高速、全面且高自动化的特点,显示出极大优势,因此世界各国均在研究基于激光雷达的输电线路巡检技术[7-9]。激光雷达按扫描方式主要可以分为两类:机械激光雷达和固态激光雷达。机械激光雷达的出现早于固态激光雷达,截止目前已有大量基于机械激光雷达的输电线路三维重建技术方案[10-12],传统机械激光雷达存在价格高昂、体积较大等缺点,难以普及应用。随着固态激光雷达技术的发展,低成本、小体积的固态激光雷达逐渐走向市场。机械激光雷达带有控制激光发射角度的旋转部件,而固态激光雷达则无需机械旋转部件,主要依靠电子部件来控制激光发射角度。由于扫描方式的不同,基于机械激光雷达的三维重建方法也无法直接应用于固态激光雷达。以本文采用的livox固态激光雷达为例,其独特的非重复扫描原理为三维重建带来了全新的挑战。
基于固态激光雷达的三维重建可以得到厘米级分辨率的高精度三维模型,而高精度模型必然造成储存空间的大量占用。
本文中重建的模型为架空输电线路,是典型的户外大规模场景,针对此类场景建模得到的点云模型点数通常可达到数十万甚至百万级。若直接使用原始数据,必然会对储存及传输造成极大的负担。因此,本文还提出了一种基于实时时空点云压缩的模型压缩方法,可有效减小模型占用。
2 输电线路实时建模
基于机械激光雷达的三维建模技术已经较为成熟。与机械激光雷达相比,本文采用的livox固态激光雷达具有以下特性:
(1)小视场。livox相较于机械激光雷达视场更小,每一帧点云的特征变得非常少,因此用传统特征匹配方法容易发生退化,使特征匹配失败。另外,特征点的减少也使得匹配过程更易受运动目标的影响。
(2)不规则扫描模式。机械式激光雷达采用多个平行的激光接收器,扫描到的点云由许多平行的环组成,这种规则的点云大大简化了特征提取过程,如图1所示。Livox固态激光雷达使用少量激光收发组件也能达到多组激光收发器同时扫描的效果。其采用的非重复扫描原理如下:在激光光路上增加2~3组可旋转的棱镜,利用光的折射来控制光在现实空间中的扫描区间与位置,同时,这套方案通过精准控制电机转动模式也能将点云集中分布在感兴趣扫描区域(ROI)。基于非重复扫描的特性,激光雷达点云分辨率也会随着时间积分不断提升,实现更加稠密的建图效果。图2为livox mid-40视场覆盖率随时间变化图。

图1 机械激光雷达点云

图2 livox mid-40视场覆盖率随时间变化
(3)运动模糊。由于采用单个激光头连续扫描,同一帧点云中各个点的实际采集时间并不完全相同,这种帧内运动会使点云扭曲,导致运动模糊。传统机械式激光雷达也存在这样的问题,但机械式激光雷达有多束激光,所以通常不会那么严重。
针对以上问题,本文在经典激光SLAM框架的基础上做了一系列改进,包括小视场提取特征、运动目标滤除、以及运动模糊补偿等。具体流程如下文所述。
2.1 优质点选择
首先定义如下几个关于点云的物理量:
(1)点云中点的深度为:
(1)
(2)点与点的偏转角为:
(2)
(3)点云中点的强度为:
I(p)=R/D(p)
(3)
其中,R为点云点的反射率,由激光雷达直接测得,可以看出强度较小代表点云点距离较远或者所属物体反射率较低。
(4)入射角定义为激光线与点云点周围平面的夹角:
(4)
为减少点云数据量,便于后续处理,基于上述指标删除如下种类的点:
(1)偏转角大于17°的点。这类点接近雷达视场的边缘,曲率较大导致特征提取结果可信度降低。
(2)强度过大或过小的点。反射强度不在正常范围内的点其测量值可能有较大误差。
(3)入射角接近水平的点。这类点的光斑会被拉成椭圆,不能作为点的信息。
去除上述点后剩下的点成为优质点(good points),特征提取将在优质点中进行。
2.2 特征提取
实现点云匹配需计算点的局部平滑度来提取平面特征或边线特征。本文提取的特征主要是点到线的残差和点到面的残差。
(1)点到线的残差。令εk表示当前点云帧中的边线特征,εm表示已构建地图中的边线特征。对于εk中的每个点,在εm中搜索它的5个最近邻点。εk中的点pl在雷达坐标系下,εm中搜索到的点pw在世界坐标系下,将pl投影到pw,有如下变换:
pw=Rkpl+tk
(5)
其中,(Rk,tk)是第k帧中最后一个采样点的位姿,使用它代表这一帧所有点的位姿,即当前帧所有点都以(Rk,tk)进行坐标变换。
设pi是pw的第i个最近点(i=1,2…,5),计算这5个点的均值μ和协方差矩阵Σ,设Σ中最大特征值为λmax,在其余特征值中任取一个为λ,若λmax>3λ,则认为pi形成了一条直线。关联点pw到这条线的残差计算公式如下:
(6)
(2)点到面的残差。与点线残差计算方法类似。令Pk表示当前点云帧中所有的边线特征,Pm表示已构建地图中的边线特征。对于Pk中的每个点,在Pm中搜索pw的5个最近邻点。设pi是pw的第i个最近点(i=1,2,…,5),计算这5个点的均值μ和协方差矩阵Σ,设Σ中最小特征值为λmin,在其余特征值中任取一个为λ,若λmax<3λ,则认为pi形成了一个平面。关联点pw到这个面的残差计算公式如下:
(7)
2.3 运动补偿
t时刻的帧内点pl在全局地图中的对应点pw的位姿为:
pw(t)=Rk-1pl+tt
(8)
改进后总体算法流程如图3。
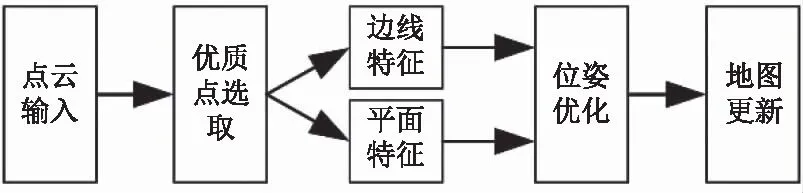
图3 建模算法流程
3 点云降噪滤波
使用激光雷达原始数据建图得到的模型会包含较多的噪声及离群点,不便于后续处理。为得到更加光顺的输电线路三维模型,本文采用基于改进模糊C均值聚类(FCM)的点云去噪算法去除离群点和噪点。FCM是一种算法简单且相对有效的聚类方法。其算法流程如下文所述。
设包含N个点的点云为P={p1,p2,…,pN},经聚类处理后被分为C类O={o1,o2,…,oC},其中oi为每个类别的聚类中心。优化函数为:
(9)
式中,μjk为pj相对于ok的隶属度,djk表示pj于ok的欧氏距离。
本文对原始FCM算法进行改进,在对距离djk的定义中加入了权重因子ω,改进后的djk定义为:
(10)
(11)
这样改进的目的在于,使远离聚类中心的点的权重更低,而靠近聚类中心的点的权重更高。这样处理可以提高算法对噪声的鲁棒性。去噪算法流程如下:对于点云中的每个点pj,如果其邻近点的数量小于设定阈值,则将pj去除;否则,用上述改进FCM算法将pj移向ok。
4 点云模型压缩
本文采用在点云序列中利用空间和时间冗余的时空压缩技术。该系统主要有距离图像转换、空间编码和时间编码三个模块。图4给出了编码过程中的结构图。

图4 压缩系统结构图
一个连续的点云序列区分了两种点云类型:一个关键帧点云(K-frame)和其他的预测帧点云(P-frame)。首先使用IMU测量值将P-frame转换到K-frame的坐标系:
(12)

变换后,将三维笛卡尔空间中的点(x,y,z)转换成距离图像中的点(θ,φ,r):
(13)
其中,θr和φr分别为激光雷达的水平和垂直分辨率;r为像素值。
然后通过拟合平面对K-frame进行空间编码,将距离图像统一划分为单元块(例如4×4)。首先对第一个块的点拟合一个平面,然后扩展到相邻的块,最终得到一个大的块。空间编码过程水平增长块,因为现在的激光雷达水平分辨率更高。拟合平面给定点可表述为线性最小二乘问题。
将K-frame中拟合的平面用于对P-frame进行时间编码,使用一个平面来编码多个连续的点云的重叠场景,避免在每帧点云中进行平面拟合,提高压缩效率。
最后,经过时间和空间编码后,对区域图像中的大部分块进行平面编码;,未被拟合的块被留在残余图中。然后平面和残余图被一个无损压缩方案(例如,霍夫曼编码)进一步压缩,生成最终编码的数据。
5 实验分析
本文在ubuntu 18.04和ros平台上实现了输电线路建模、滤波和压缩算法。实验平台配置为:大疆mainfold2边缘计算设备,cpu为Intel i7-8550U,8 GB内存,固态激光雷达选择livox mid-70。
5.1 输电线路实时建模实验
实验场地为四川某地220 kV架空输电线路使用livox mid-70雷达进行实时建模得到的结果如图5所示。

图5 输电线路建模结果
图6 模型滤波结果
得到的模型精度为0.05 m,实时建模帧率在10 f/s以上,可满足实时性要求。
5.2 点云滤波实验
原始数据得到的模型包含较多噪声,对其进行滤波处理得到结果如图。滤波前为5763943个点,滤波后为4938425个点,去除了15 %的噪声点及离群点。
5.3 点云压缩实验
原始数据经过建模和滤波后,为减轻传输压力,需要对其进行数据压缩。首先将模型pcd文件转换为bin文件,然后使用本文提出的压缩算法进行编码压缩。压缩前模型大小为227 MB,压缩后为43 MB,压缩率为18.9 %,可大幅减小传输带宽。将压缩后的模型解码即可还原为pcd文件,可视化后点云如图7所示。

图7 经过压缩后的点云模型
压缩后的模型与原始模型相比,并未损失太多细节。验证了压缩算法的有效性
6 结 语
本文针对输电线路巡检场景,提出了一种基于固态激光雷达的实时建模、滤波及数据压缩技术,解决了传统机械激光雷达成本高昂、难以普及的痛点。实验分析表明,本文提出的方案可以实现高精度实时建模,有效去除模型噪声及离群点,在保留模型细节信息的前提下,大幅减少储存及传输空间消耗,有效降低了巡检工作的成本,提高了其效率及自动化程度。
