PID参数调整下水轮机水锤效应的实验分析
2023-10-24温苾芳魏蒙希李钦林龚晓静
温苾芳 魏蒙希 李钦林 龚晓静
电子科技大学成都学院工学院 四川成都 611731
2020年,我国水电年发电量突破1.20万亿kW·h,电力系统中水电占比日益增高[1]。与此同时,我国水电相对集中的西南电网中,超低频振荡现象日益明显,影响电网稳定[2-3]。
研究表明,水锤效应是引发超低频振荡现象的重要因素之一[3-4],而水轮机组多采用PID型调速器,研究PID参数调整对水锤效应的影响,对水电占比较多地区电力系统的安全稳定运行具有重要意义。
相关研究人员非常重视水锤效应引发的现象,对其机理开展研究。文献[5]在利用伯德图和阻尼分析法研究超低频振荡阻尼特性;文献[6]讨论了调速器参数对频率稳定的影响;文献[7]在单机无穷大系统中,研究水锤效应和输出功率对系统阻尼的影响。
本文首先推导水轮机、电动机及调速器等主要装置的数学模型,继而根据实际运行情况对各模型进行合理简化。随后在MATLAB/Simulink中搭建水轮机调速控制模型,研究PID参数与水锤效应间的关系,并在单机无穷大系统验证所得结论的正确性。
1 水轮机调速系统数学模型
水轮机调速控制系统由水轮机、PID调速系统、电液伺服系统、发电机等部分组成,系统调速过程框图如图1所示。

图1 水轮机调速过程框图
图中,ω0为额定转速,ω为实际转速,Δω为转速偏差,Pm为水轮机提供的机械功率,Pe为发电机输出的有功功率,PL为负荷有功。调速器利用Δω调节叶片开度,控制机组Pm,实现对Pe的调节。
2 水轮机调速系统设计
本文对水轮机调速系统进行仿真,探索水轮机调速系统的阻尼特性,研究不同调速参数下系统的运行特性。
2.1 调速系统阻尼特性分析
已知调速系统中各模块的模型后,探索调速特性与阻尼特性间的关系,系统特征方程如式(1)。
(1)
式中,Ds=D+KL,将式(1)表示为标准形式:s2+2ξωns+ωn2=0,其中ωn为无阻尼振荡频率,ξ为单机系统阻尼比,则ξ可表示为:
(2)
可知,水流惯性时间常数TW变大,系统阻尼减少,易产生负阻尼,影响系统稳定。
2.2 水轮机调速系统参数设计
在MATLAB中以传递函数,依次构建PID调速器模型、伺服系统模型、水轮机模型、发电机及负荷模型,并连接成完整的水轮机调节系统模型。
仿真图中,开关K1接入表示空载频率扰动仿真实验,开关K2接入表示负荷扰动仿真实验,系统各参数如下表所示。

调速系统参数表
2.3 调速系统空载特性分析
对水轮机组调速系统进行空载仿真,依次分析Tw、KP、KI、KD对系统特性的影响。
同一空载扰动下,保持其他参数不变,对不同TW仿真,观察系统水锤效应的影响,系统频率变化波形如图2所示。

图2 TW对系统频率的影响
由图2可知,TW数值较小时,调速器超调量很小;TW增大时频率变化增大。说明空载扰动下,TW越大水锤效应对调速系统影响越明显。
保持其他参数不变,对KP不同取值进行仿真,观察系统频率变化,波形如图3所示。
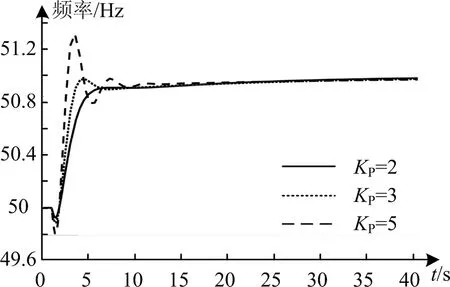
图3 KP对系统频率的影响
由图3可知,KP数值增大时频率偏差也增大,说明空载扰动下,KP越大水锤效应对系统影响越严重。
同理,对KI、KD不同取值进行仿真,观察系统频率变化。综上,空载频率扰动下,Tw、KP对水锤效应有较大的影响。此时,减小Tw、KP可减弱水锤效应,进而降低其对频率的影响。
2.4 调速系统负荷特性分析
水轮机调速系统进行带负荷仿真,负荷扰动下,依次令Tw、KP、KI、KD取不同值,观察系统频率,波形如图4所示。

(a)Tw的影响
由图4(a)可知,负荷扰动下增加Tw的值,频率幅值变化增大,表明水锤效应增强,对速度控制系统影响越大。由图4(b)可知,随着KP取值增大,频率偏差不断降低,且响应时间提前。由图4(c)可知,KI增大时,系统频率偏差有所回升,且恢复时间变短,表明负荷扰动下,KI抑制水锤效应效果有限,但一定范围内利于系统恢复稳定。由图4(d)中KD增大,左下角水锤效应幅值及后续频率波形均未表现出明显变化,表明实际调速中KD对水锤效应影响较小。
2.5 调速系统阻尼特性分析
空载实验和负荷实验均表明,Tw对水锤效应影响显著。
分析x的不同取值对系统频率的影响,由频率波形可知,系统阻尼x越小,甚至为负时,水锤效应逐渐明显,且对系统频率的影响不断增大。系统阻尼变小,系统频率更容易振荡,稳定性变差。实际系统中,可以通过提高系统阻尼,减小水锤效应的不良影响。
3 仿真验证
本节在MATLAB中搭建单机无穷大系统模型,并验证水轮机水锤效应对调频能力的影响。
对单机无穷大系统进行仿真时,为观测Tw、KP、KI、KD分别对系统特性的影响,可保持其他参数不变,依次令Tw、KP、KI、KD取不同值进行仿真,观察系统频率变化情况,所得波形如图5所示。

(a)Tw的影响
由图5可知单机无穷大系统中改变各参数后,Tw越大,水锤效应越明显;KP增大,响应时间提前;KI增大,系统频率恢复时间变短,KD取值对水锤效应影响较小。
4 小结
本文以水轮机机器调速系统的数学模型为基础探索了水流惯性时间常数、PID参数等对水锤效应的影响,结果表明:
(1)Tw与水锤效应之间存在较强联系,其取值较小时,调速系统向反方向调节量较小,过冲也较小,反之则导致过冲增大,即,降低TW可以在一定程度上抑制水轮机水锤效应。
(2)比例系数KP的取值与系统响应时间相关,其值越大,系统响应越快,然而在空载和负载两种情况下KP对水锤效应的影响有所不同,空载扰动下,减小KP可减小水锤效应,便于频率调整;负荷扰动下,增大KP利于减小水锤效应。
(3)积分系数KI和微分系数KD对水锤效应的影响不大,仅对调速系统的调速规律产生影响。
本文在单机无穷大系统中对上述结论的正确性进行验证,对实际系统的水轮机参数调节具有一定的参考价值。
