基于UNet 模型的赛道识别算法研究
2023-10-22于海滨余胤翔巩荣芬
徐 威, 于海滨, 余胤翔, 巩荣芬
(辽宁科技大学电子与信息工程学院, 辽宁 鞍山 114051)
0 引 言
近些年,智能汽车获得了迅猛发展,陆续涵盖了工程控制、信息与通信、模式识别、传感技术、电气工程、计算机等多个学科及领域。 研究可知,智能汽车技术在交通运输、智能驾驶等方面有着广阔的应用前景与发展空间[1]。 智能汽车的核心部分是赛道元素识别、方向和速度控制,精准的赛道元素识别算法是方向和速度控制的基础和前提,尤其是面对复杂路况时赛道的识别是系统设计的难点[2]。 智能小车相比于真实汽车有着专属的特点和用途,智能小车具有机械结构简单轻便、驾驶模式低速安全、整车易于改造实现等特点,可以用于智能汽车核心控制系统的研发设计[3]。 最近几年,深度学习方法在赛道识别方面也取得了很好的效果。 这些方法可以自动学习特征,从而更加精确地识别出赛道。 本文就智能小车的赛道识别问题提出了一种基于Keras的UNet 模型的识别方法,可对逐帧图像进行识别处理,划出中线集,来判断道路状况,以此来实现对赛道元素的精准识别。
1 传统赛道识别现状
赛道识别是从图像或视频数据中准确识别出赛道,这是自动驾驶、机器视觉和计算机视觉等领域的基础。 目前,赛道识别研究已经较为成熟,其中一些传统的赛道识别方法包括颜色分割、特征提取、边缘检测算法。 最近几年,深度学习的赛道识别方法也取得了很好的效果。 这些方法可以实现自动学习特征,以此更加准确地识别出赛道。 为了更准确、更快速地对赛道进行识别,需要结合深度学习和计算机视觉等技术进行改进。
2 赛道识别实现思路
2.1 基于UNet 模型的赛道识别算法
基于UNet 模型的赛道识别算法主要可以分成2 个部分。 第一部分是对输入进的图像根据网络训练出的结果进行预测,将图像分割成背景和赛道两部分;第二部分是对赛道部分进行细化算法求取中点集。 最后,根据中点集就可以预测智能车未来的行径。
2.2 UNet 模型实现
UNet 是一种用于图像分割任务的卷积神经网络模型。 由Ronneberger 等学者在2015 年提出,并广泛应用在医学图像分割领域。 该模型的特点是具有对称的U 形结构[4],其中包含一个下采样路径和一个上采样路径,使得在保持空间分辨率的同时,能够对图像进行有效的语义分割。 UNet 的训练过程通常使用交叉熵损失函数,并且可以使用数据增强技术来增加数据的多样性。 该模型在医学图像分割方面的应用,不仅能够对肿瘤和器官进行有效的分割,而且在其他领域、如自然图像分割和道路分割等方面也取得了可观成果。
2.2.1 主干特征提取
采用的主干特征提取网络为VGG16。 VGG16总共有16 层,包括13 个卷积层和3 个全连接层。第1 次经过64 个卷积核的2 次卷积后,采用1 次pooling,第2 次再经过2 次128 个卷积核卷积后,再采用pooling,再重复2 次3 个512 个卷积核卷积后,再采用pooling,最后经过3 次全连接[5]。
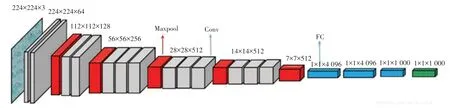
图1 VGG16 结构图Fig. 1 Structure diagram of VGG16
利用VGG16 提取后的卷积层和最大池化层,经过图2 的卷积及池化操作后,获得5 个初步的有效特征层。
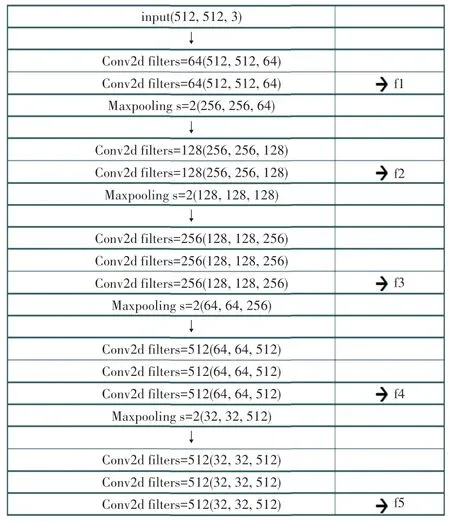
图2 有效特征层示意图Fig. 2 Schematic diagram of the effective feature layer
2.2.2 主干特征提取
经过主干特征提取网络,可以获得5 个初步的有效特征层,在加强特征提取网络过程中,会利用这5 个初步的有效特征层进行特征融合[6],特征融合的方式就是对特征层进行上采样后、再进行堆叠。为了方便网络的构建与呈现出更好的通用性,在上采样时直接进行2 倍上采样再进行特征融合,最终获得的特征层和输入图片的高宽相同。
2.2.3 Loss 解析
Loss 解析是指对一个神经网络模型的训练过程中,计算出的误差损失值进行分析和解释。 可以帮助了解模型的训练效果和优化方向,从而更好地调整模型参数,提升模型性能。
本文使用的Loss 由Cross Entropy Loss 和Dice Loss 两部分组成。 Cross Entropy Loss 就是交叉熵损失,在对像素点进行分类时使用[7]。 Dice Loss 将语义分割的评价指标作为Loss,Dice 系数是一种用于度量2 个样本相似度的指标,常用于自然语言处理中的文本匹配任务。 是用来测量2 个样本中共同出现的元素或特征的比例,取值范围在[0,1]。 其值可用如下公式进行计算:
2.2.4 预测结果
获得特征层后,就可以利用输入进来的图片特征预测结果,使用1×1 的卷积进行通道调整。
2.3 细化算法实现
细化算法是一种图像处理算法,现已广泛应用于数字图像处理领域。 算法可以将图像中的线条或轮廓进行细化,以达到消除噪声、减少数据冗余等目的。 细化算法在很多应用领域都有着重要的作用,例如医学图像处理、指纹识别、人脸识别等。
细化算法是一个迭代算法,整个迭代过程分为2 部分,对图像的像素进行处理。 数学方法公式分别见如下:
其中,N(P1) 表示与P1 相邻的8 个像素点中,为实景像素点的个数;S(P1)表示像素中出现0~1的累计次数[7],0 为背景,1 为实景。
符合上述全部算法时该格子的算法为1,并且根据这2 个部分进行迭代,直到结果不再变化为止。最后的结果就是细化算法后的骨架。
3 数据集处理
3.1 数据集构建
UNet 的工作实际上就是对图片的每个像素点进行分类,以此来对各像素点位的每个类别概率进行预测。 UNet 模型训练用的数据集,采用VOC 的格式,分为2 部分,第一部分是原图,为RGB 图像[高,宽,3]; 第二部分是标签,为灰度图图像[高,宽]。 原图和标签的数据集图片如图3 所示,是239个原图与标签图。

图3 原图和标签的数据集图片Fig. 3 Dataset image of the original image and labels
3.2 数据增强
为了扩大样本的数据量,需提高模型在复杂环境下的准确性和泛化能力。 本文对数据集下的图像进行了改变亮度、锐化处理,模糊处理等操作。 改变亮度、锐化处理、模糊处理后的图像数据,可以模拟出赛道在不同光照强度下的场景。 对原图的亮度处理是在(-40,40)的范围内随机加减,通过对每个像素点加减值,来达到改变图像亮度的效果; 对原图的锐化处理是增强图像的边缘对比度,需要先对图像进行高通滤波处理[8],来突出其特征边缘,再对特征边缘在(1.1,1.3)范围内做随机倍数加强;对原图的模糊处理上是随机添加均值为0、方差为1 的高斯噪声[9]。 原图和标签的数据集图片如图4所示。

图4 数据集增强Fig. 4 Dataset enhancement
4 实验与结果分析
4.1 试验平台
在Windows10 系统下, CUDA v10.0, cuDNN 7.5.0,运用Python 3. 6. 4 语言进行编译,基于Tensorflow 2.6.2 下的Keras 2.6.0 框架下搭建的,在VS Code 2021 下运行。
4.2 识别效果
使用基于UNet 模型的赛道识别算法,对输入视频的每一帧进行识别,选取其中一帧,识别效果如图5 所示。

图5 识别效果图Fig. 5 Recognition rendering
4.3 时效性分析
本文对算法进行了测试,选取了30 帧的视频作为检测对象,记录每一帧下的频率,画出时效性分析图来体现基于UNet 模型的赛道识别算法的时效性。时效分析结果如图6 所示。

图6 时效分析图Fig. 6 Aging analysis
4.4 准确度分析
本文为了验证基于UNet模型的赛道识别的准确性,与传统赛道识别算法进行结果比对。 对于传统赛道识别算法,研究中采用的是颜色分割和边缘检测的方法。
实验时对相同的赛道视频进行识别,并对其输出的中点集与正确中点集进行比较。 为了加强准确度分析的严密性,研究采取分别对其在不同环境情况下(低光照、正常光照、高光照)的8 张赛道图片进行识别,对输出的中点集使用编辑距离算法,计算与实际中点集的误差,公式具体如下:
其中,a,b是2 个数组,f(i,j) 是a中的前i个字符和b中前j个字符的编辑距离。
研究得到的识别偏差结果对比见表1。

表1 识别偏差结果对比表Tab. 1 Comparison table of identification bias results
5 结束语
本文针对赛道识别问题,提出了一种基于UNet模型的赛道识别方法,使用UNet 模型分割后的掩码图像提取赛道的边缘信息,再用细化算法求取中点集。 本文对UNet 模型的框架和原理进行了简单阐述,并通过时效性分析,发现了模型存在的初始运行慢问题,通过准确度分析实验,发现相比于传统赛道识别方法,本文方法在不同环境下的赛道识别有了很大的提升。 后续需要继续研究结构和算法的改进,进一步提升新方法的时效性和准确率。
