基于深度卷积神经网络的汽轮机转子故障诊断
2023-10-22唐杰,钱进,张涛
唐 杰, 钱 进, 张 涛
(1 贵州大学电气工程学院, 贵阳 550025; 2 贵州现代物流产业投资有限责任公司, 贵阳 550001)
0 引 言
汽轮机发电机组作为电力生产系统的关键设备,长期在高负荷、变工况的情况下运行可能发生故障产生振动,振动严重时不仅影响汽轮机的正常运行,降低机组发电产量和质量,还可能造成严重的设备和人身事故[1]。 由于引起汽轮机振动的因素较多,很难通过现场检查分析找到产生故障的具体原因。 因此,分析汽轮机轴系振动常见故障特征,通过故障信号及时判别故障类型很有必要。 目前关于汽轮发电机组故障诊断技术方面的研究已经有了很大的进展,侯国安等学者[2]针对汽轮机故障频率存在非线性、诊断复杂、相关参数属性集庞大的特点,利用决策树C4.5 算法对故障进行分类,速度快、准确性高。 艾科勇等学者[3]针对传统的单一的故障诊断方法在汽轮发电机组故障诊断中具有一定的局限性,研究了本体和信号分析在故障诊断领域的优势,基于EEMD、排列熵和SVM 的信号分析方法辨识出故障类型,提出一种适用于汽轮发电机组故障诊断的方法。 石志标等学者[4]基于排列熵与改进的果蝇算法(IFOA)优化相关向量机(RVM)的汽轮机转子故障诊断方法,提高了汽轮机转子故障诊断的识别准确率和效率。 杨新等学者[5]针对汽轮机转子发生的典型故障,提出一种基于多特征提取和核主元分析的核极限学习机诊断模型,与基于单一特征向量的模型相比,能够增强模型的输入特征、减少信息冗余和特征向量的相关性,在一定程度上提高模型的预测性能。 田松峰等学者[6]提出了一种基于集合经验模态分解(EEMD)、云模型与支持向量机(SVM)相结合的汽轮机转子多故障诊断方法,能够准确地完成转子多故障诊断,具有更高的识别率。周磊等学者[7]以某600 MW 机组为对象,提出一种基于模糊理论与SOM 神经网络相结合的故障诊断方法,通过聚类功能,对故障模式分类实现了具体数字化和图形可视化,诊断结果简单和直观。
近年来,关于卷积神经网络(CNN)的研究已成为人工智能领域发展的新趋势,常应用于图像识别、语音识别等领域。 CNN 将传统的人工神经网络与深度学习理论相结合,在图像分析处理方面,较以往的图像分类方法,减少了前期对输入图像数据的预处理过程,不需要手动提取图像特征,而是直接输入原始图像,进行层次化的抽象处理,得到分类结果,并且具有更高的识别率和准确率。 本文将CNN 应用于汽轮机振动故障诊断,利用快速傅里叶变换将汽轮机故障振动信号的时域波形转化为频谱图,选用常见的LeNet-5 网络结构,选取ReLU函数作为激活函数,引入Dropout方法防止过拟合,对汽轮机转子发生故障的振动信号进行识别、诊断。
1 转子振动诊断相关理论
1.1 CNN
CNN 是一类包含卷积计算且具有深度结构的前馈神经网络(Feedforward Neural Networks),是深度学习的代表算法之一[8]。 卷积神经网络有以下优点:输入图像和网络的拓扑结构能很好地吻合;特征提取和模式分类同时进行,并同时在训练中产生;权重共享可以减少网络的训练参数,使神经网络结构变得更简单,适应性更强。 CNN 的基本结构主要包括输入层、卷积层、池化层、全连接层和输出层[9]。 网络结构如图1 所示。

图1 CNN 结构图Fig. 1 CNN structure diagram
卷积层通常由多个卷积核构成,通过在原始图像上平移对输入数据进行特征提取。 卷积层通过卷积核的移动遍历整段数据进行卷积运算,分别计算出数据点的权重与偏差;并通过激活函数进行非线性变换来拟合复杂的映射关系,建立数据与其所属类别间的联系,其运算公式为:
其中,为第l层的第i个数据的第j个特征值;为权重系数;为偏差值;f(· ) 为激活函数。
激活函数选用ReLU函数,其公式为:
卷积层后就是池化层,采取最大池化的方法,挖掘数据有效特征信息,减小卷积层输出特征向量的大小[10],即在一个区域内求出最大值来代替该区域的所有值,从而实现降低维度目的,原理为:
全连接层连接池化层和逻辑回归层,将提取到的数据特征汇聚一起后进行分类。 最后,输出层将输出所有特征组合。
1.2 Dropout 方法
Dropout方法是在神经网络训练中解决过拟合的重要方法。 首先,在每一次训练过程中,随机地将隐层中的某些节点置零;再对这样的模型进行训练得到结果;然后,将多次训练的结果进行整合,得到最终的拟合结果。Dropout的可视化表示如图2 所示。
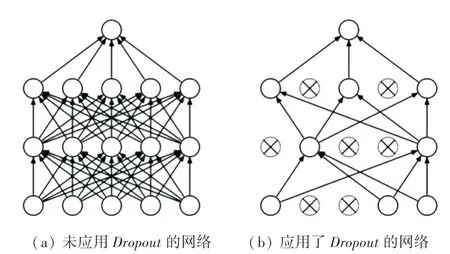
图2 使用Dropout 前后的神经网络模型Fig. 2 Neural network model before and after using Dropout
2 样本获取及转换
2.1 样本获取装置
实验样本基于实验测试,运用ZT-3 转子振动实验台收集汽轮机转子动静碰摩、不平衡、不对中三种故障、各250 组振动数据。 ZT-3 转子振动实验台的主要设备包括电动机、涡流传感器、摩擦螺钉及支架、转子、内外侧轴承座等,结构如图3 所示。 为了模拟汽轮机实际运行转速,试验台转速设置为3 000 r/min,样本长度为1 024,样本周期数为8,信号中心频率为50 Hz。 信号测试分析系统为CMMSMA,采样频率范围为10 Hz~128 kHz。
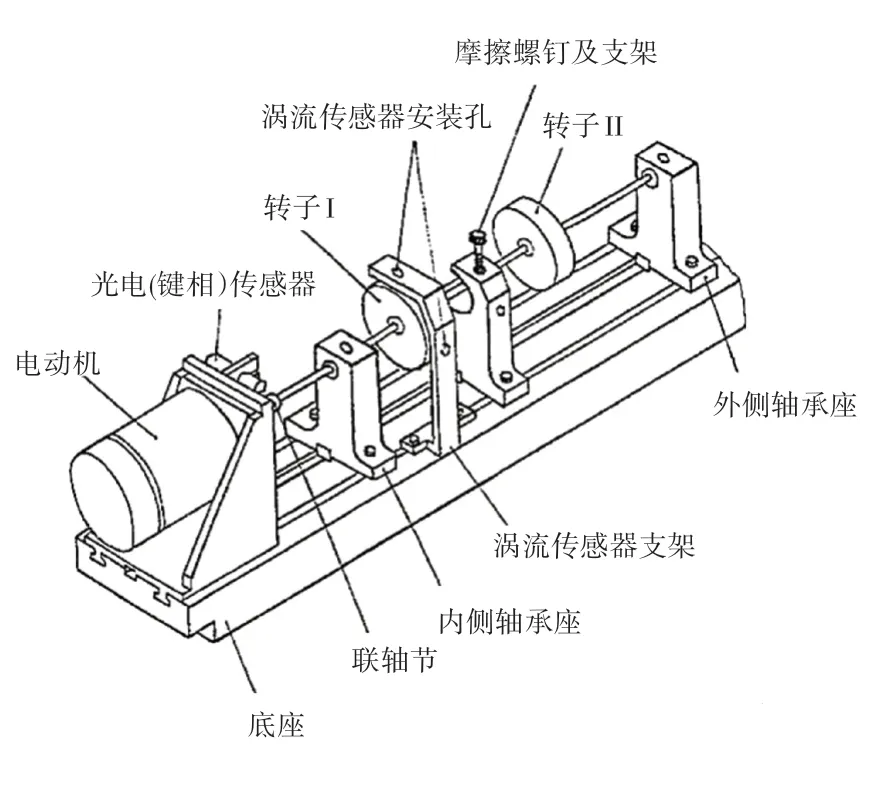
图3 ZT-3 转子振动实验台Fig. 3 ZT-3 rotor vibration test bench
2.2 获取的频域特征图形
实验收集的转子动静碰摩、转子质量不平衡、转子不对中三种故障时域波形图如图4~图6 所示。
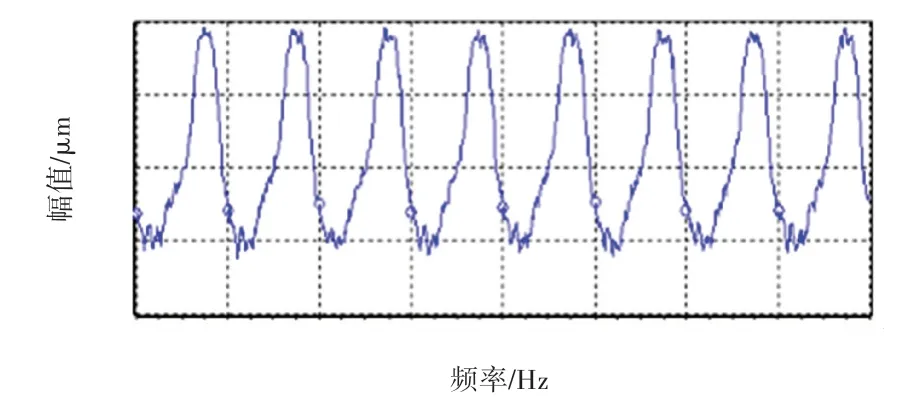
图4 动静碰摩时域波形Fig. 4 Time-domain waveform of dynamic and static touching

图5 转子质量不平衡时域波形Fig. 5 Time-domain waveform of rotor mass imbalance
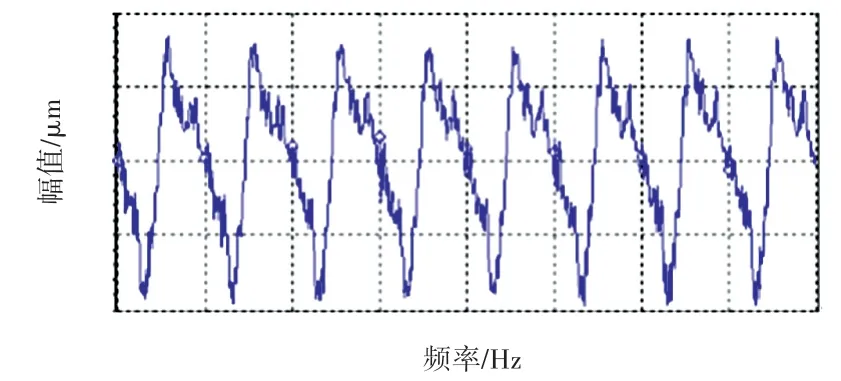
图6 转子不对中时域波形Fig. 6 Time-domain waveform of rotor misalignment
由于测试数据的时域信号受噪声干扰而不易表现故障特征,故需将信号时域波形转化到频谱图中并进行分析。 傅里叶变换虽然在信号处理上有很大优势,但其信号源要求是平稳信号,存在一定的局限性,而汽轮机的振动信号往往是不稳定、非线性的,因此使用快速傅里叶变换(FFT)将其转换为频谱图进行分析,如图7~图9 所示。
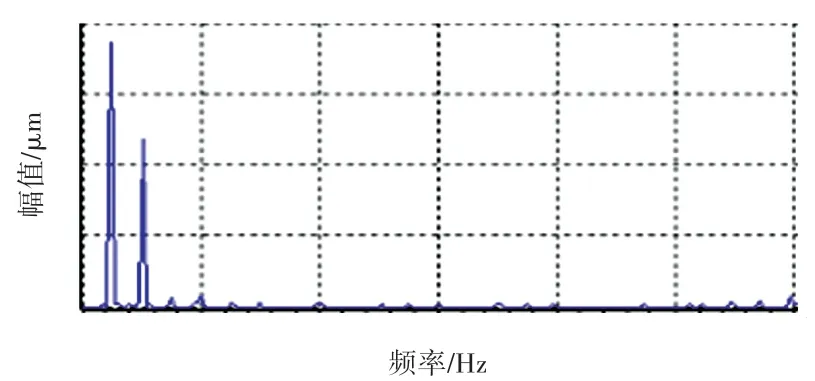
图7 转子动静碰摩频谱图Fig. 7 Rotor dynamic and static friction spectrum
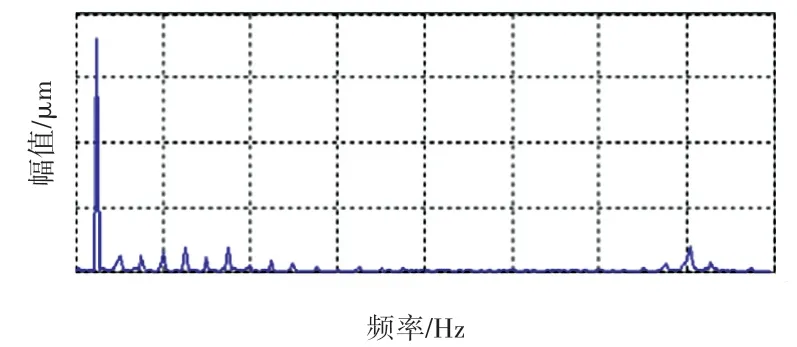
图8 转子不平衡频谱图Fig. 8 Rotor imbalance spectrum
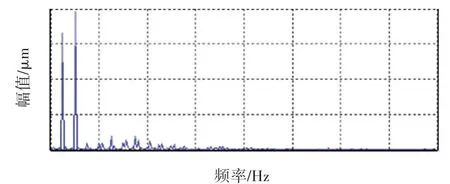
图9 转子不对中时域频谱图Fig. 9 Rotor misalignment time-domain spectrum
2.3 数据增强
数据增强方法常被用于解决模型因小样本而过拟合的问题,通过对图像采用如裁剪、翻转、旋转和缩放等操作生成新的样本。 因此,分别实验测得的数据样本进行翻转、缩放、平移变换,得到3 种故障样本,包括原始数据的振动样本各800 组,数据增强后部分样本如图10 所示。 需要指出的是:翻转、平移变换后不易标注。
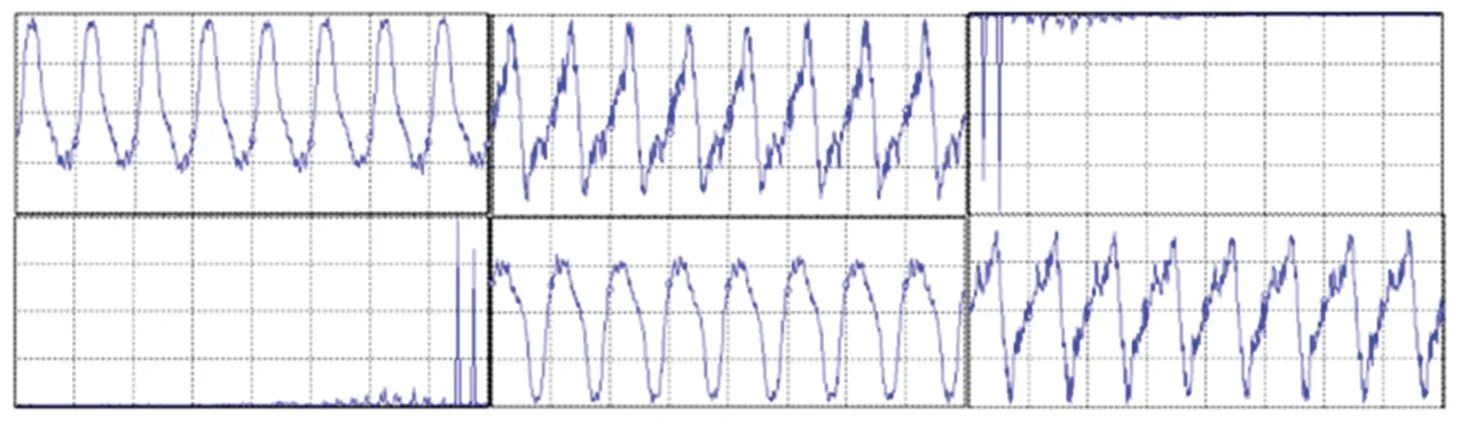
图10 数据增强样本Fig. 10 Samples of data enhancement
3 基于CNN 的故障诊断模型建立
3.1 诊断模型算法设计
算法设计如图11 所示。

图11 基于CNN 的汽轮机转子故障诊断算法Fig. 11 CNN-based turbine rotor fault diagnosis algorithm
3.2 模型参数设置
在训练中不同的层数和卷积核对模型影响很大,在经过多次模型参数调整后选用LeNet-5 模型。以LeNet-5 模型的网络结构为基础,在全连接层添加Dropout层预防过拟合,输出层采用Softmax分类器。Softmax的计算公式为:
CNN 网络结构共7 层,如图12 所示。

图12 网络结构图Fig. 12 Network structure diagram
由图12 可知,网络结构包括1 个输入层、2 个卷积层(C1、C3)、2 个下采样层(S2、S4)、1 个全连接层和1个输出层。 CNN 网络结构参数见表1。 基于Relu函数在网络中展现出的优点,激活函数使用Relu函数。
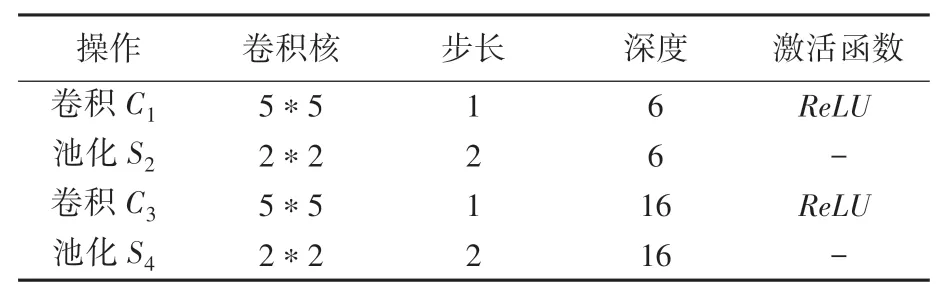
表1 CNN 网络结构参数Tab. 1 CNN network structure parameters
模型训练的样本将其划分为训练集(75%)和测试集(25%),以训练集来训练神经网络参数,以测试集来测试神经网络的泛化能力。
3.3 诊断结果分析
此次实验是在Python 环境下实现,采用网格搜索对CNN 网络中超参数(学习率、训练次数、训练尺寸)进行优化计算,通过穷举搜索,将参数通过交叉验证的方法进行优化来得到最优,将各个参数可能的取值进行排列组合,列出所有可能的组合结果生成“网格”。 随后将各组合用于CNN 训练,并使用交叉验证对效果进行评估。 在拟合函数尝试了所有的参数组合后,返回一个合适的分类器,自动调整至最佳参数组合。 学习率初始值设定为0.1,训练次数为5,训练尺寸为5。 得到的最优参数见表2。 经验证,样本检验的诊断结果见表3。

表2 CNN 网络参数Tab. 2 CNN network parameters
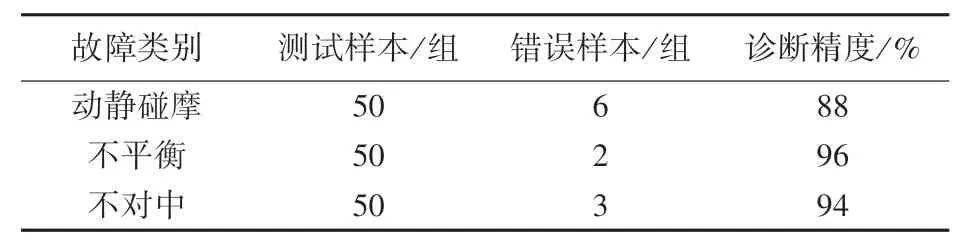
表3 各种故障下诊断精度Tab. 3 Diagnostic accuracy under various faults
经过动静碰摩、不平衡、不对中三种故障的各50 组测试样本的测试,其中动静碰摩故障错误样本6 组,诊断精度为88%;不平衡故障错误样本2 组,诊断精度为96%;不对中故障错误样本3 组,诊断精度为94%。 通过模型对测试样本的诊断,诊断精度可达92.67%。
4 结束语
本文针对汽轮机组转子动静碰摩、转子不平衡、转子不对中三种典型故障,提出一种基于卷积神经网络的汽轮机组振动预测方法。 研究得到结论如下:
(1)针对故障信号非线性、不稳定,利用快速傅里叶变换将故障信号由时域信号转换为频谱图,更能表现出故障特征。
(2)针对实验获取的训练样本过少的问题,利用数据增强的方法,通过对样本图像的翻折、缩放、平移变换,解决了深度卷积神经网络过拟合的问题。
(3)通过测试集验证,基于深度卷积神经网络的汽轮机转子故障诊断方法对故障诊断的精度可达92.67%,精度较高。
