载人月面着陆器飞行策略优化研究
2023-10-21孙兴亮朱恩涌
黄 震,孙兴亮,余 欢,朱恩涌
(北京空间飞行器总体设计部,北京 100094)
0 引 言
载人登月的飞行模式主要有两种[1]:一种是一次发射、船器组合奔月模式,即载人月面着陆器与载人飞船共同飞行至环月轨道,如美国“阿波罗”计划、苏联登月计划[2];另一种是分别发射、船器独立奔月模式,即载人月面着陆器提前飞行至月球轨道,在该轨道与载人飞船交会对接,实现落月前的人员和物资转移,如美国“阿尔忒弥斯”计划[3]、中国载人月球探测工程[4]。
无论哪种飞行模式,载人登月飞行器的速度增量需求都非常大。其中,载人月面着陆器一般负责近月制动、月面下降着陆和月面起飞,其总速度增量将超过5 000 m/s,约为近地载人飞行器的15倍,如阿波罗任务的载人月面着陆器推进剂与发射质量的占比达到了71.5%[5]。
载人月面着陆器的设计难点在于重量控制[6],从图1中不难看出,重量控制的重点在于控制推进剂的使用量。根据飞行器自身特征,对任务进行合理的规划,选择优化的飞行策略是载人月面着陆器最为关键的设计因素。

图1 阿波罗着陆器质量组成Fig.1 Mass allocation of the Apollo lunar lander
1 载人月面着陆器及其飞行过程
载人月面着陆器质量约26 t[7],由登月舱和推进舱组成,具备自主控制飞行能力,可将两名航天员、月球车、相关载荷送达月球表面,采用轻量化设计提高了结构效率,并具备动力冗余功能来保证航天员的安全。载人月面着陆器是航天员登陆月球后的月面生活中心、能源中心及数据中心,支持开展月面驻留和月面活动,如图2所示[7]。
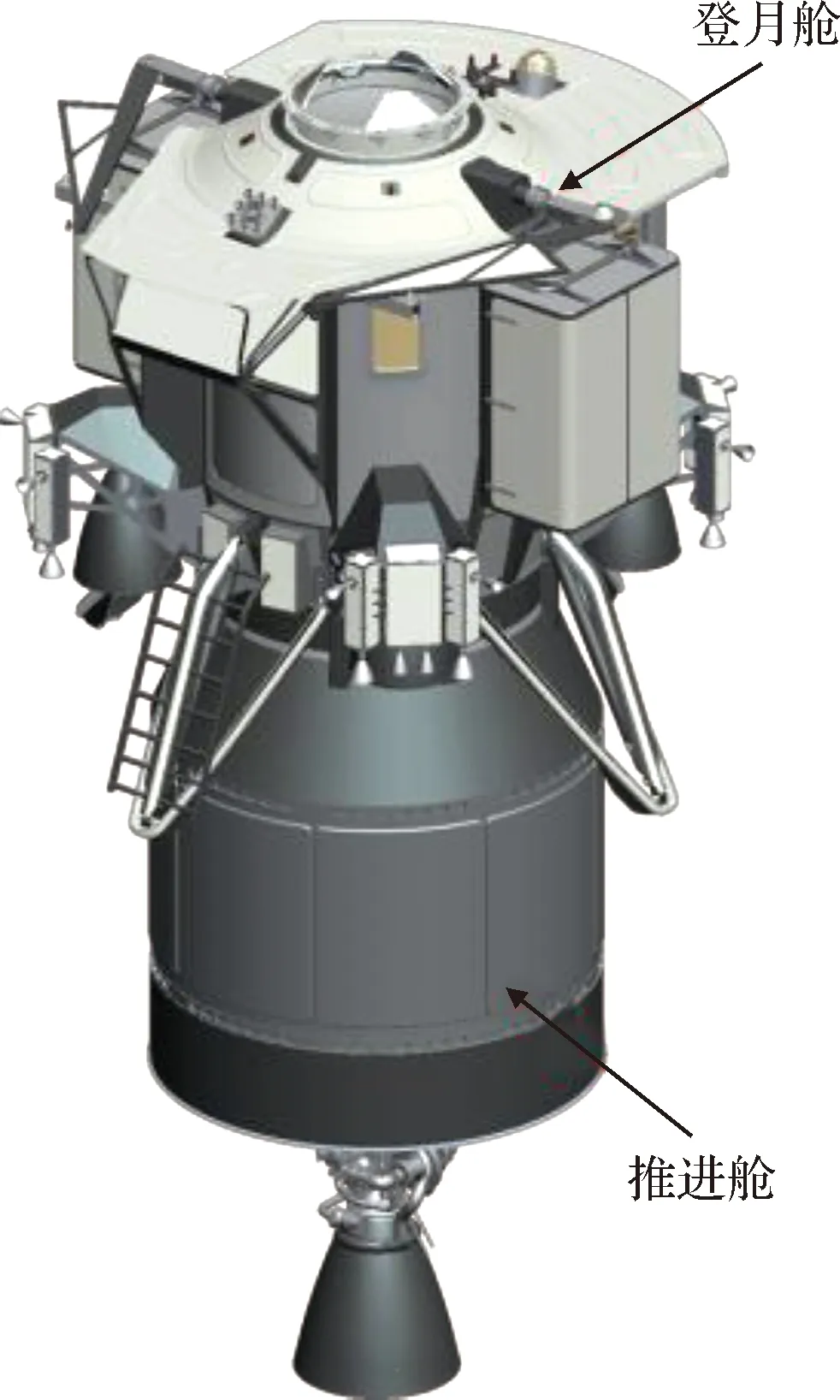
图2 载人月面着陆器构型图Fig.2 Configuration of the manned lunar lander
载人登月的初步方案是[4]:采用两枚运载火箭分别将载人月面着陆器和载人飞船送至地月转移轨道,载人飞船和载人月面着陆器在环月轨道交会对接,航天员从载人飞船进入载人月面着陆器。之后,载人月面着陆器将下降着陆于月面预定区域,航天员登陆月球开展科学考察与样品采集。完成既定任务后,航天员乘坐载人月面着陆器上升至环月轨道与载人飞船交会对接,并携带样品乘坐载人飞船返回地球。
按照该载人登月方案,载人月面着陆器将主要经历以下飞行阶段:
1)地月转移飞行
载人月面着陆器从地球飞往月球的过程,一般为3~5天,期间需要进行中途修正和近月制动,速度增量约为850 m/s[8-9]。
2)环月飞行
载人月面着陆器近月制动后,环绕月球长期飞行,等待载人飞船共同执行登月任务。环月飞行期间,轨道面和轨道高度需要维持,总速度增量不宜超过50 m/s。
3)动力下降与着陆
由于月球没有大气,航天员搭乘载人月面着陆器着陆到月球的过程主要依靠发动机反推进行减速和着陆,等效速度增量约2 000 m/s[9-10],为推进剂消耗最多的飞行阶段。
4)起飞上升
航天员搭乘载人月面着陆器上升入轨的过程主要依靠发动机提供发射动力,等效速度增量约1 850 m/s[8],推进剂消耗量占比大。
5)环月交会对接
载人月面着陆器与载人飞船在月球轨道交会对接的过程中,速度增量约为80 m/s[11]。由于是任务末端,干重对推进剂用量的影响非常显著,可以达到1∶10左右。
根据载人月面着陆器的两舱功能分配,近月制动和动力下降主减速的推进剂消耗由推进舱提供[7],其余飞行阶段的推进剂消耗由登月舱提供。
本文在讨论各种优化策略时,给出了一些仿真算例,采用的主要输入参数说明如下。载人月面着陆器发射质量取26 t,两舱轨控发动机比冲均取300 s,根据各飞行阶段的速度增量需求,首次与载人飞船交会对接前的整器质量取19.5 t,月面下降前的整器质量取19.9 t,登月舱月面起飞前质量取8 t。
2 月面着陆器正常飞行策略优化
本文根据不同飞行阶段的特点,提出飞行全过程的优化思路,从任务规划、轨道特性、实施方案等多个角度优化载人月面着陆器推进剂使用量。
2.1 基于最低发射窗口的地月转移设计
飞行器地月转移设计通常有一般转移轨道、自由返回轨道和混合轨道3种。为适应不同登月点和不同环月轨道倾角的任务需求,发射时为无人状态的月面着陆器可采用一般转移轨道。这种策略下,载人月面着陆器到达任意倾角环月轨道的近月制动速度增量基本保持不变,实现全月面任意登月点可达,任务适应能力强、推进剂消耗小。不同环月轨道倾角下的近月制动速度增量算例见图3。
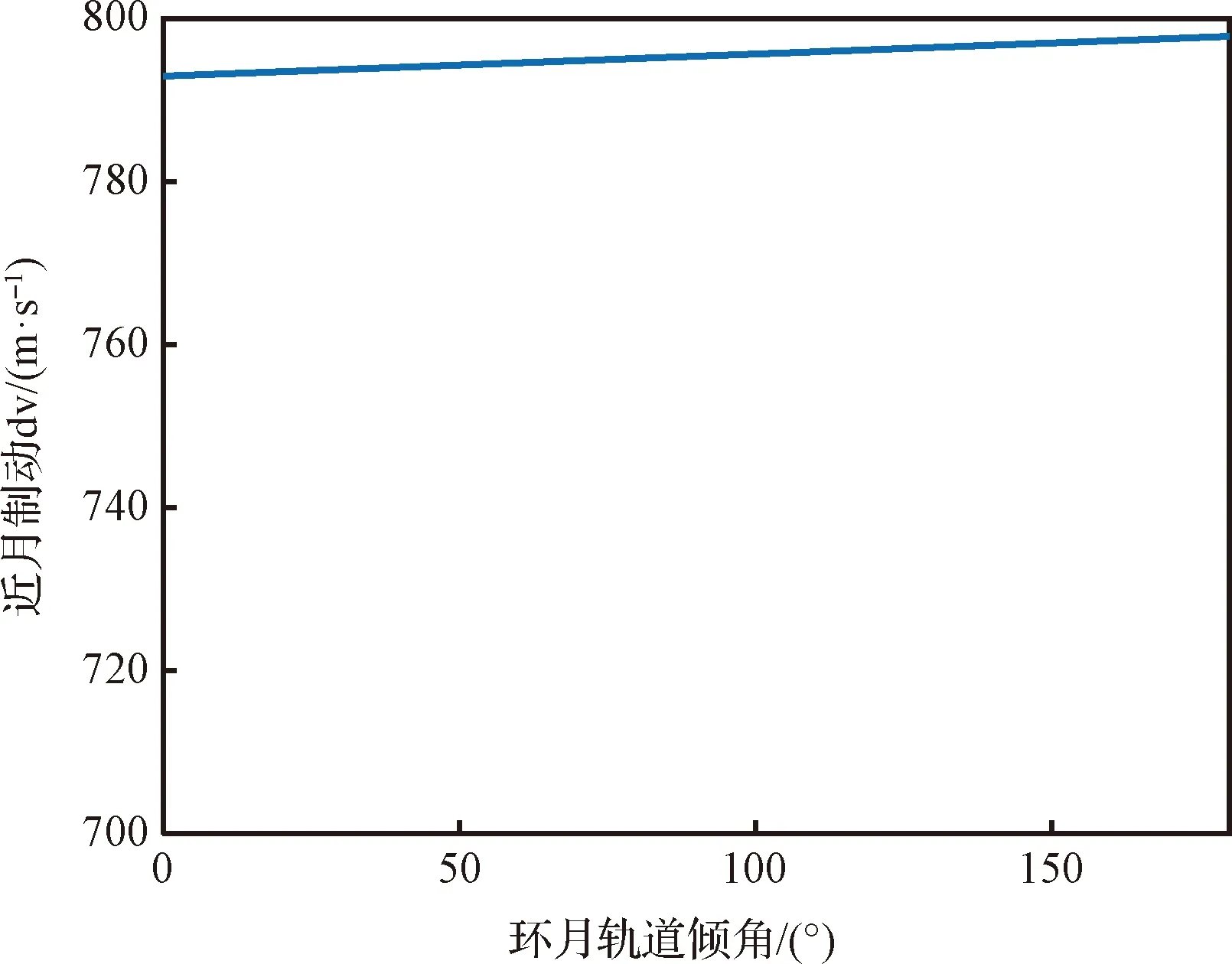
图3 不同环月轨道倾角下近月制动速度增量算例Fig.3 Velocity increments for lunar orbit insertion in lunar orbits with different inclinations
近月制动速度增量随地月相对位置关系、地月转移的升降轨方式变化,即:
ΔvLOI(sC,tL)≈ΔvLOI(sC,tL+TM)
(1)
式中:ΔvLOI为近月制动速度增量;sC为升轨或降轨出发标志;tL为发射日期;TM为恒星月,约27.3天。对于同一种近地出发方式,ΔvLOI随发射日期近似呈周期变化。
根据近月制动特性分析,综合考虑推进剂消耗代价、任务规划灵活性设计发射窗口,具体方法建模如下:
(2)
式中:Δvmax为近月制动速度增量上限约束;NT为一个恒星月内满足速度增量约束的发射窗口数量;Nmin为单月发射窗口数量下限约束,一般为2~3天。
以2029年发射的5天一般转移轨道为例,ΔvLOI的变化情况见图4。取Δvmax为810 m/s,则NT不少于11天;降低Δvmax至800 m/s,则NT不少于8天;进一步降低Δvmax至790 m/s,则NT不少于5天,不小于发射窗口数量下限。因此,在发射窗口数量满足工程任务最低需求的前提下,可以优化一般转移轨道的近月制动速度增量分配,节约近月制动推进剂消耗量达140 kg。
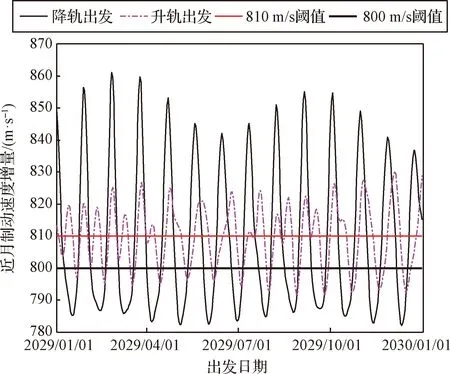
图4 一般转移轨道近月制动速度增量变化情况Fig.4 Velocity increments for lunar orbit insertion in a general translunar orbit
2.2 基于轨道摄动的环月设计
载人月面着陆器近月制动后的初始环月轨道升交点经度Ω0相对固定,落月时刻的轨道升交点经度ΩL为
ΩL=Ω0+(ωM+ωP)NL
(3)
式中:NL为近月制动至落月的环月飞行时长,一般不进行大幅调整,以免影响整个登月任务规划;ωM为月球自转引起的升交点经度西退速率,约-13.2(°)/天;ωP为月球轨道摄动引起的升交点赤经东进速率,对于相同的近月点位置和轨道倾角,ωP主要与远月点高度ha相关。
载人登月任务中,落月当圈的环月轨道升交点经度Ωt根据登月点位置、月面驻留时长确定,是由任务规划安排唯一确定的。因此在ΩL偏离Ωt时,需增加轨道机动使ΩL=Ωt。
为节约推进剂消耗,基于环月轨道摄动机理,本文提出两次近月制动策略,通过调整第1次近月制动后的初始环月轨道远月点高度ha0改变ωP,进而改变Ω0的变化速率,尽可能减小升交点经度偏差。初始环月轨道设计可建模为如下优化问题:
(4)
式中:x为优化设计变量;NL1为2次近月制动间的环月飞行时长;hat为第2次近月制动后进入的目标环月轨道远月点高度;NL2为第2次近月制动至落月的环月飞行时长。
ΩL的调整范围越大,越能够更接近任务所需的Ωt,额外用来调整升交点经度所需的推进剂就越少。以目标环月轨道倾角165°的登月任务为例,不同ha0范围下的ΩL可达域宽度见图5。按环月飞行60天考虑,若ha0在2 000~3 500 km范围调整,对应的ΩL的可达域宽度为5.4°;若ha0的可调范围扩充至2 000~7 000 km,则对应的ΩL的可达域宽度为16.5°。
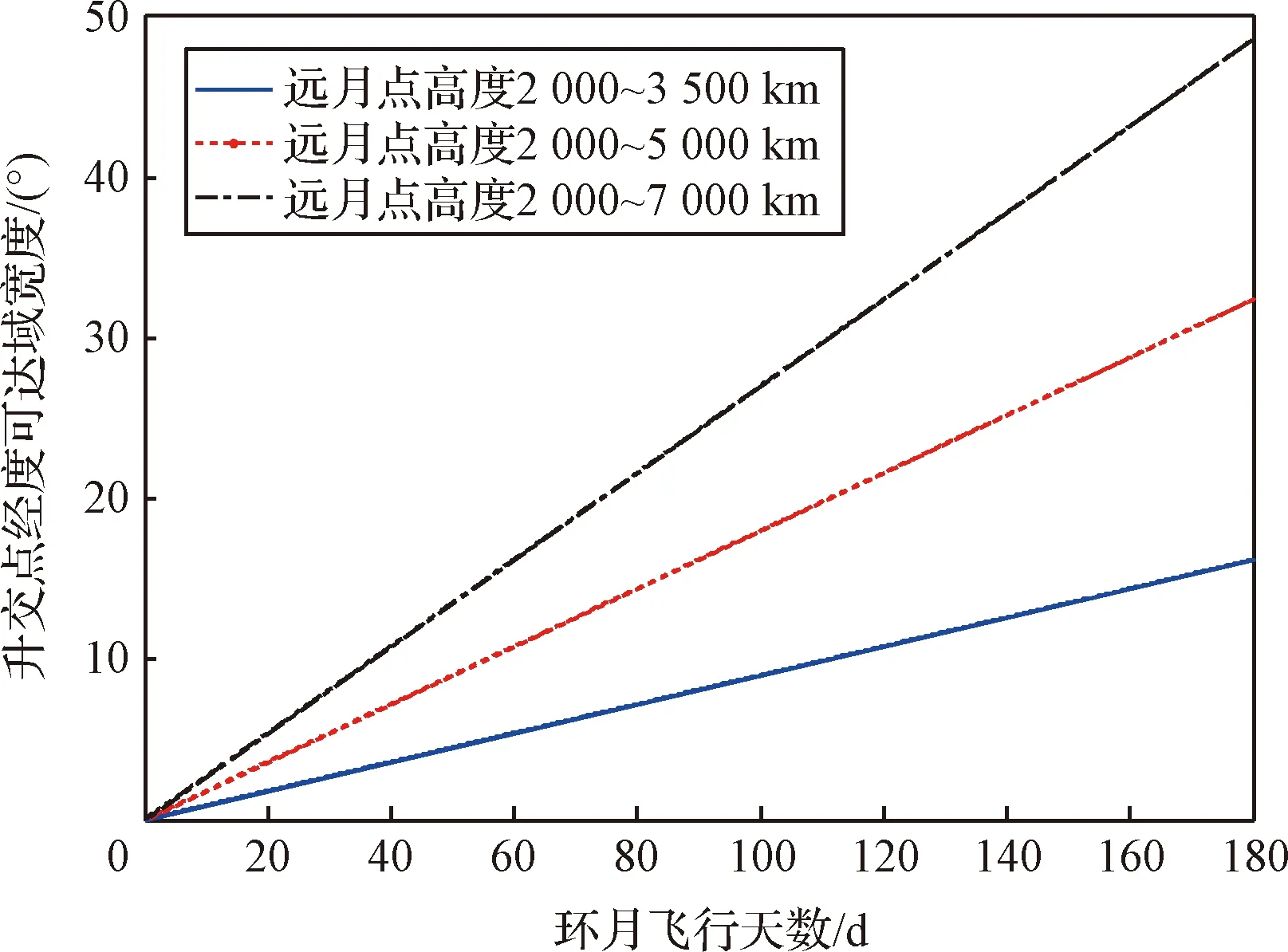
图5 不同远月点高度下的升交点经度可达域Fig.5 Attainable region of longitude of ascent node for lunar orbits with various apolune height
采用远月点高度可调的大椭圆环月轨道设计策略,可降低环月飞行期间轨道修正的速度增量需求。若采用1次近月制动策略,直接进入远月点高度hat的目标环月轨道,则需要为升交点经度修正多预留一部分推进剂。以5°的升交点经度修正量为例,针对上述165°倾角的目标环月轨道,需多消耗推进剂约150 kg。
2.3 基于两舱均衡消耗的环月降轨设计
载人月面着陆器登月舱和推进舱均配置了推进系统,任何一个舱段的推进剂使用量不仅与自身执行任务的速度增量有关,还由于整器质量影响,与另一舱段推进剂已使用情况有关,两舱推进剂使用量耦合性很强,如下式所示:
(5)
式中:Δmk为第k次轨控任务的推进剂消耗量;m0为整器初始质量;Δvi为第i次轨控任务的速度增量;Isp为发动机比冲;g为地球重力加速度。
假设第k次轨控任务由推进舱执行,第l次轨控任务(l≤k-1)由登月舱执行,根据上式可得Δmk对Δvl的敏感度:
(6)
式中:mk为第k次轨控任务后的整器剩余质量;Δvl为登月舱执行第l次轨控任务的速度变化量。
由上式可见,Δmk与Δvl负相关,即由登月舱执行的第l次轨控任务Δvl越小,由推进舱执行的第k次轨控任务推进剂消耗量Δmk就越大。因此,一般来说,登月舱推进剂预算时需考虑Δvl取极大值的工况,推进舱推进剂预算时则要考虑Δvl取极小值的工况,即两舱在推进剂预算时都按照最大需求预留,造成了资源浪费。
例如,中途修正速度增量ΔvMCC由登月舱执行,散布范围较大,约为0~27 m/s,见图6。根据两舱推进剂使用的耦合关系,该速度增量波动使两舱需要分别预留240 kg和130 kg以应对中途修正不确定性。

图6 中途修正速度增量分布算例Fig.6 Distributions of velocity increments for mid-course correction
本文提出月面下降两舱均衡消耗方法,通过调整动力下降初始高度,达到充分利用两舱剩余推进剂的目的。由于推进舱推进剂在动力下降结束后将无法使用,应尽可能实现推进舱推进剂耗尽。在ΔvMCC较小时,登月舱剩余推进剂较多,整器质量大,通过降低动力下降初始高度,减轻推进舱动力下降负担;反之,登月舱剩余推进剂较少、整器质量轻时,通过提高动力下降初始高度,可以利用推进舱剩余推进剂能力减轻登月舱环月降轨负担,从而实现两舱推进剂均衡消耗。
月面下降两舱均衡消耗方法可用如下优化模型表示:
(7)
式中:hPDI为动力下降初始高度,为设计变量;ΔvLO和ΔvPD1分别为环月降轨和动力下降速度增量,分别由登月舱与推进舱提供,与hPDI相关;mD0为环月降轨前的整器质量,与环月降轨前的整器推进剂消耗量ΔmD0相关;ΔmLO和ΔmPD1分别为环月降轨和动力下降的推进剂消耗量;mPR1为动力下降前推进舱推进剂可用量,与前期推进剂消耗情况相关。
假设ΔvMCC取0 m/s时,hPDI设计为15 km,则在ΔvMCC取27 m/s时,推进舱可从26 km处执行动力下降,在充分利用推进舱剩余推进剂的同时,可节省登月舱推进剂21 kg。
2.4 基于中途分离的动力下降设计
载人月面着陆器的动力下降过程如图7所示。动力下降过程一般可分为2个阶段:第1个阶段从动力下降开始至距月面较低高度,主要目标是降低环月轨道高度和速度至目标值;第2个阶段从第1个阶段结束至着陆月面,主要目标是瞄准一条稳定、缓速的飞行轨迹,便于执行避障所需的导航、地形识别和机动控制,确保着陆安全性。
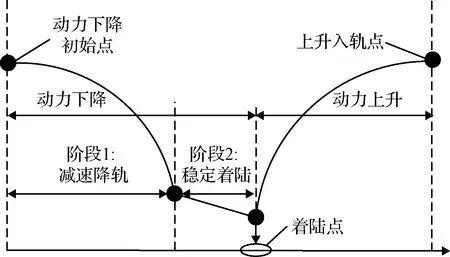
图7 动力下降和动力上升阶段划分Fig.7 Stage division for powered descent and powered ascent
为减少推进剂消耗,载人月面着陆器一般在上升前将推进剂消耗殆尽的舱段分离,以较小的质量规模上升入轨。分离点可选择在月面,也可以选择在下降中途,即动力下降阶段1和阶段2的交班点。由于提前进行舱段分离,登月舱执行阶段2的稳定着陆任务负重小,任务效益更高。
动力下降全程的推进剂消耗随两舱分离高度变化,以推进剂消耗最少为目标开展中途分离高度的优化设计,优化模型如下:
(8)
式中:hSEP为中途分离高度;x为设计变量;mPDI和mSEP分别为动力下降前的整器质量、中途分离后的登月舱质量;mR1为中途分离时推进舱剩余质量,包括舱段干重和推进剂不可用量;ΔvPD2和ΔmPD2分别为登月舱独自下降着陆过程的速度增量和推进剂消耗;ΔmPD为动力下降的总推进剂消耗;fs为设计约束,一般考虑安全性约束,如两舱落点的安全距离、两舱分离后低高度飞行的安全避障等。
动力下降的推进剂总消耗一般随中途分离高度升高而增加,主要因为动力下降第2阶段并非沿推进剂最优轨迹飞行,该阶段在整个动力下降轨迹的占比越大,总速度增量越大。图8给出了动力下降的推进剂总消耗量随中途分离高度的变化算例,图中纵坐标表示的是不同分离高度的推进剂消耗量相对于2 km分离高度的变化量。由结果可见,若中途分离高度从3 km降至2 km,推进剂总消耗量可节省135 kg。
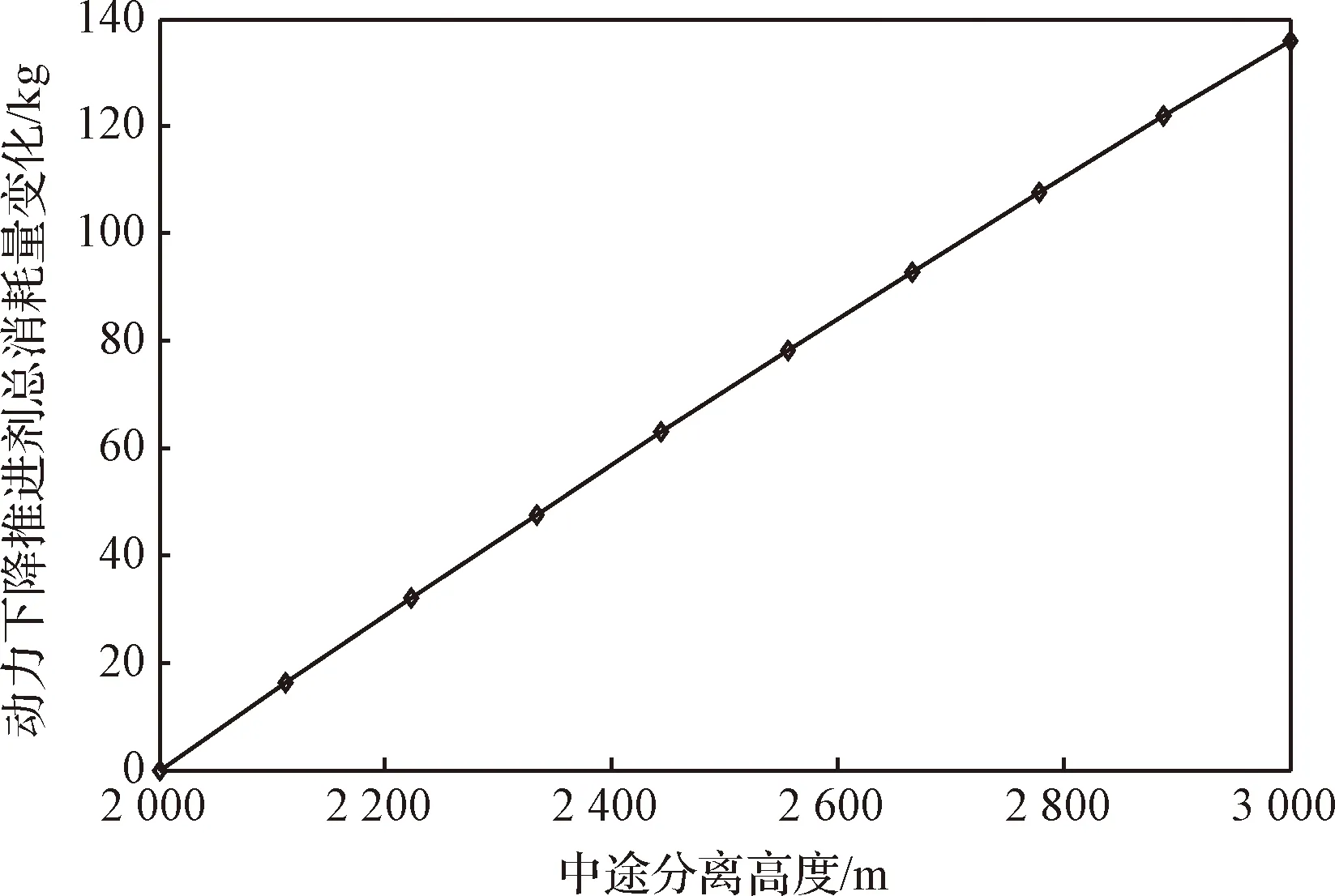
图8 动力下降推进剂总消耗量随分离高度变化Fig.8 Variation of total propellant consumption with separation height for powered descent
2.5 基于最佳推重比的月面上升设计
月面动力上升的主要目标是提高环月轨道高度和速度至目标值,总速度增量达到1 850 m/s左右,是载人月面着陆器推进剂消耗最多的飞行阶段之一。该飞行阶段受月球引力影响,推重比对速度增量的影响显著,如图9所示。
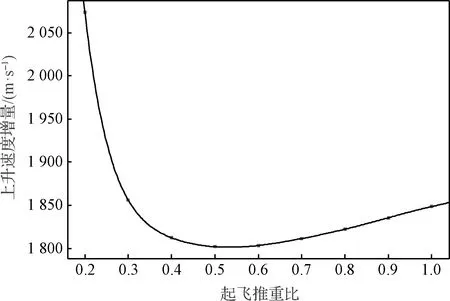
图9 上升段等效速度增量随推重比变化情况Fig.9 Variation of equivalent velocity increment of powered ascent with the ratio of thrust to weight

图10 抛分质量随初始推重比的变化关系Fig.10 Variation of desert weight with the initial ratio of thrust to weight
从图中可以看出,推重比0.25与推重比0.5相比,需要多消耗速度增量约100 m/s。因此,在载人月面着陆器上升段的最佳推重比选择为0.4~0.6。
然而,载人月面着陆器为确保安全,需要在特定情况下采取动力重构的方式继续上升[12],这就会使上升过程中推重比显著减小,推进剂消耗增大。因此提出在推力不足的情况下,通过减少起飞重量,以维持较好的推重比,达到节约推进剂的目的。
不同起飞推重比下的抛分质量mED可由下式估计:
(9)
式中:mPA0为月面起飞初始质量;ΔmE-N为动力重构上升推进剂使用量较正常飞行的增量设计目标;ΔvPAN和ΔvPAE分别为标称和动力重构时动力上升等效速度增量,与初始推重比ε相关。
在初始推重比ε取0.5时,若抛分质量mED为297 kg,则动力重构后的上升推进剂消耗与标称模式一致。换言之,采用该方法能够抵消动力重构造成的推重比损失,与不抛分方案相比,节约推进剂约285 kg。
2.6 基于快速自主的月轨交会对接设计
载人月面着陆器返回环月轨道的质量规模与交会对接的资源需求密切相关,应考虑快速交会对接方案,通过大幅压缩飞行时长,最大限度地降低载人月面着陆器对能源、乘员消耗品等的需求。
嫦娥探月任务中,环月交会对接模式飞行时长约2天[13],快速交会对接模式可在环月轨道1~2圈内完成,飞行时长压缩至4%~8%。
基于霍曼变轨的环月快速交会对接方案见图11。载人月面着陆器从月面上升后进入环月椭圆轨道,入轨点在近月点附近,飞行半圈后在特征点(入轨轨道远月点)执行Δv1进入调相轨道,在完成调相后的下一个特征点执行霍曼转移,在半圈内通过两次变轨Δv3, Δv4进入交会目标轨道,之后与载人飞船进行近距离控制飞行,一般可再细分为寻的段、接近段、平移靠拢段等。实际任务过程中,根据入轨精度按需安排一次轨道面修正,如图11的Δv2。
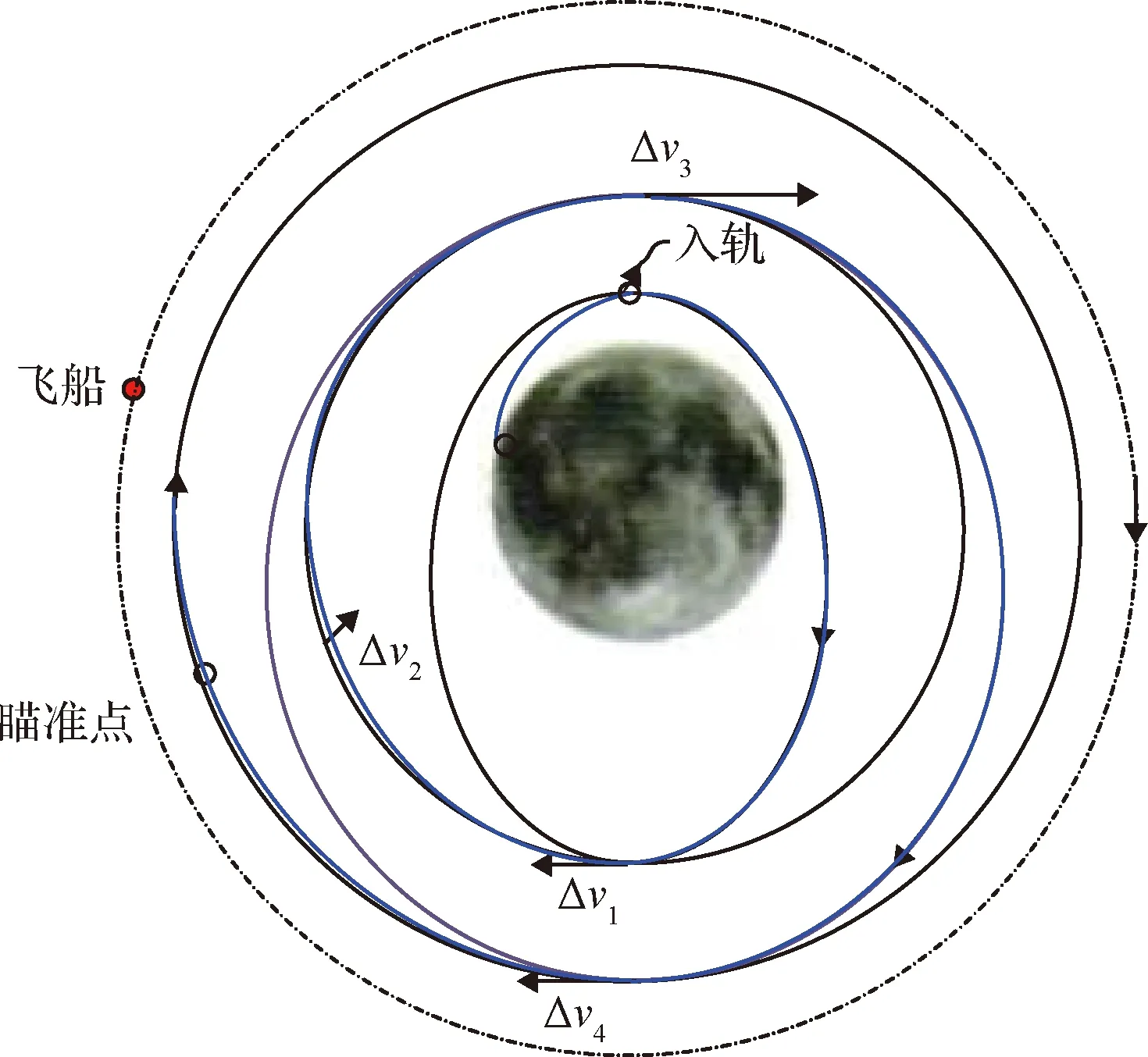
图11 基于霍曼变轨的环月快速交会对接方案Fig.11 Lunar rapid rendezvous strategy based on the Hohmann maneuver method
霍曼交会策略的推进剂消耗可用如下公式评估:
(10)
式中:ΔvR为总速度增量;i=1,3,4为各次霍曼转移标志;μM为月球引力常数;k和l分别为霍曼转移初始和末端的特征点标志,若k代表近月点,则l代表远月点,反之亦然。
采用快速自主交会对接能够减少消耗品及相关设备携带量,如水、气、食物以及废物收集设备等,可为载人月面着陆器节省大量的质量和空间。按照阿波罗任务2名乘员4小时快速交会对接设计,可节省干重约43 kg,折合发射质量超过300 kg。
3 月面着陆器应急飞行策略优化
载人月面着陆器对航天员安全的要求高,需要在飞行全过程设计应急飞行方案,确保在发生任何故障的情况下,均能将航天员送回在环月轨道等待的载人飞船。本文关注的是,通过飞行策略优化实现整器推进剂使用量的合理分配,主要优化思路包括:处置故障的推进剂消耗量尽量与正常分配值相当,减少额外推进剂配置;压缩故障处置时间,减少应对故障额外配置的专门设备和资源;综合评估利用多重故障下的推进剂,减少资源重复预留等,以下为几个典型示例。
3.1 基于物资抛分的异面上升设计
环月轨道倾角由登月点纬度和月面工作时间共同确定。如图12所示,根据轨道和登月点纬度几何关系,可得:
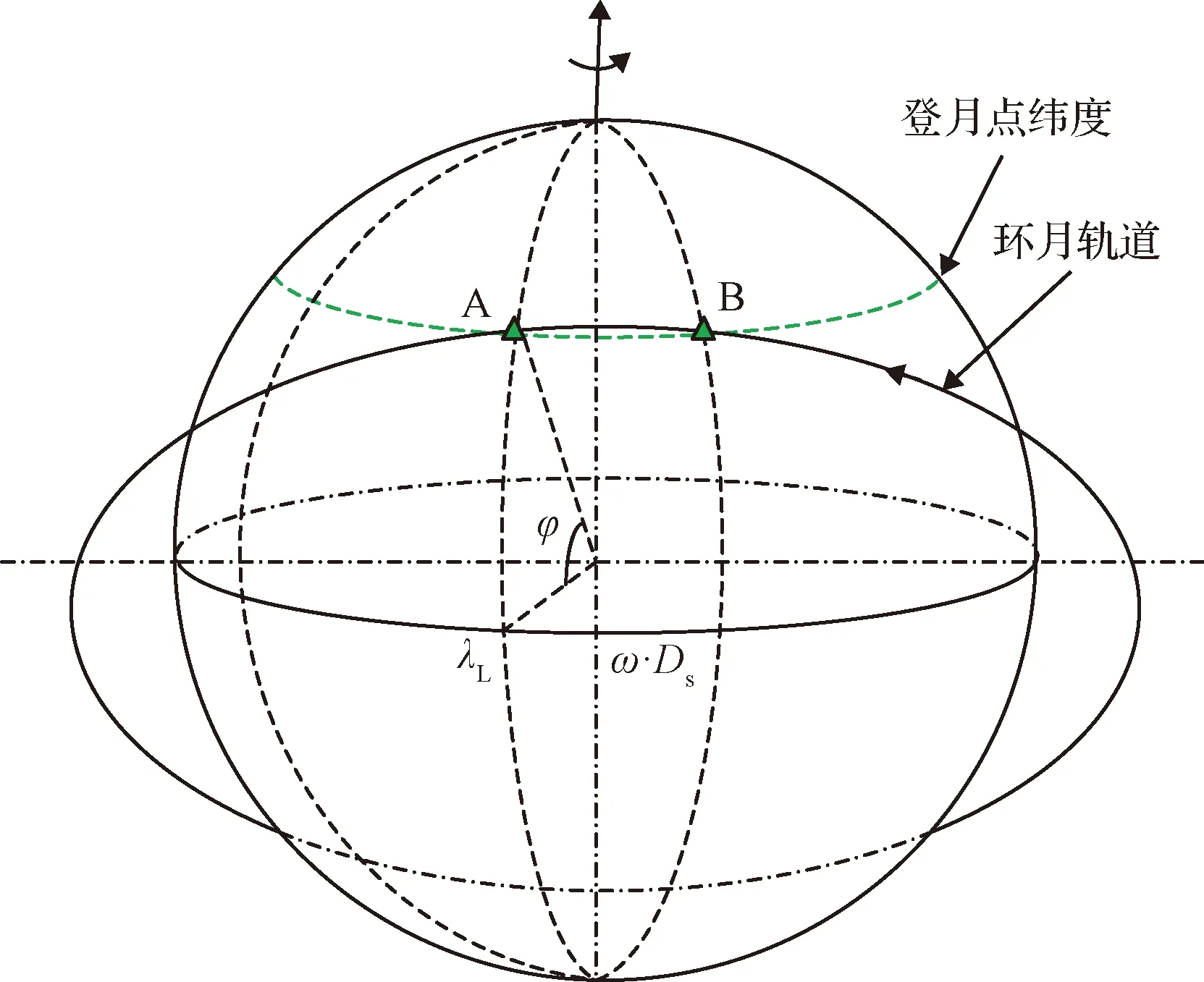
图12 环月轨道倾角和着陆点纬度关系Fig.12 Relationship between the lunar orbit inclination and latitude of landing site
(11)
式中:Ds为月面工作时间;φ为登月点纬度;i为环月轨道倾角。
应急情况下,月面着陆器需要在图12中A~B点(着陆点、起飞点)之间紧急起飞,登月舱上升入轨后与载人飞船轨道不共面,需要消耗更多的推进剂完成后续交会对接任务。以1°的轨道面偏差修正为例,需要30 m/s的速度增量,约42 kg推进剂。在正常情况下,这部分为修正轨道面多携带的推进剂将被带回环月轨道,无法产生效益,造成资源浪费。
为节省推进剂资源,尽量缩小应急飞行与正常飞行的推进剂消耗量差额,可采用物资抛分设计,即在应急上升前将部分可舍弃的设备和物资抛离,通过降低上升初始质量减少应急飞行推进剂消耗。应急上升后的交会对接推进剂使用量较正常飞行的增量ΔmRD+与应急抛分质量mED的关系如下式所示:
(12)
式中:ΔmE-N为应急飞行推进剂使用量较正常飞行的增量设计目标,即通过应急抛分设计约束应急飞行的推进剂使用量;ΔvPA为动力上升的等效速度增量。
图13给出了应急抛分质量与轨道面偏差修正设计需求。若故障发生后,通过在月面抛分170 kg左右的物资,轨道面偏差修正能力可提升至2°,在不额外增加推进剂的情况下,满足大部分低纬度地区的应急异面上升需求。
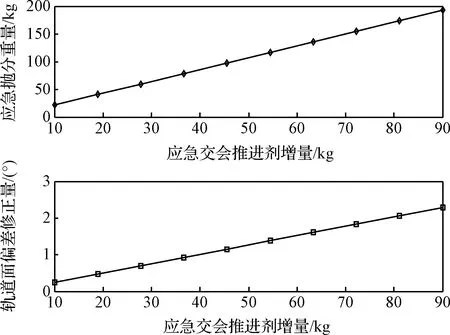
图13 应急抛分质量与应急交会对接能力关系Fig.13 Variations of emergent desert mass with emergent rendezvous ability
3.2 基于兰伯特变轨的应急交会策略
航天员在月面活动期间,一旦发生能源系统瘫痪、密封舱被微流星击穿等紧急重大故障,需要载人月面着陆器立即起飞返回环月轨道,尽可能快地将航天员安全送回载人飞船。在2.6节采用霍曼交会策略实现2圈月轨快速交会的基础上,进一步考虑能源、压力应急等紧急故障下的月轨交会问题,可以采用更加快速的兰伯特交会策略,降低蓄电池容量、应急气体等配置需求。
基于兰伯特变轨的环月快速交会对接方案如图14所示。载人月面着陆器入轨后在合适的相位执行兰伯特变轨的首脉冲ΔvLbt1,进入椭圆转移轨道,完成相位追及后执行兰伯特变轨的末脉冲ΔvLbt2,进入目标交会轨道。根据实际在轨执行精度,ΔvLbt1和ΔvLbt2之间可视情安排几次修正脉冲。若快速性要求有所降低,兰伯特变轨策略也可结合特征点变轨执行,即载人月面着陆器入轨后先通过特征点变轨进入一个过渡轨道再执行兰伯特交会,如阿波罗计划的共椭圆交会策略[11]。
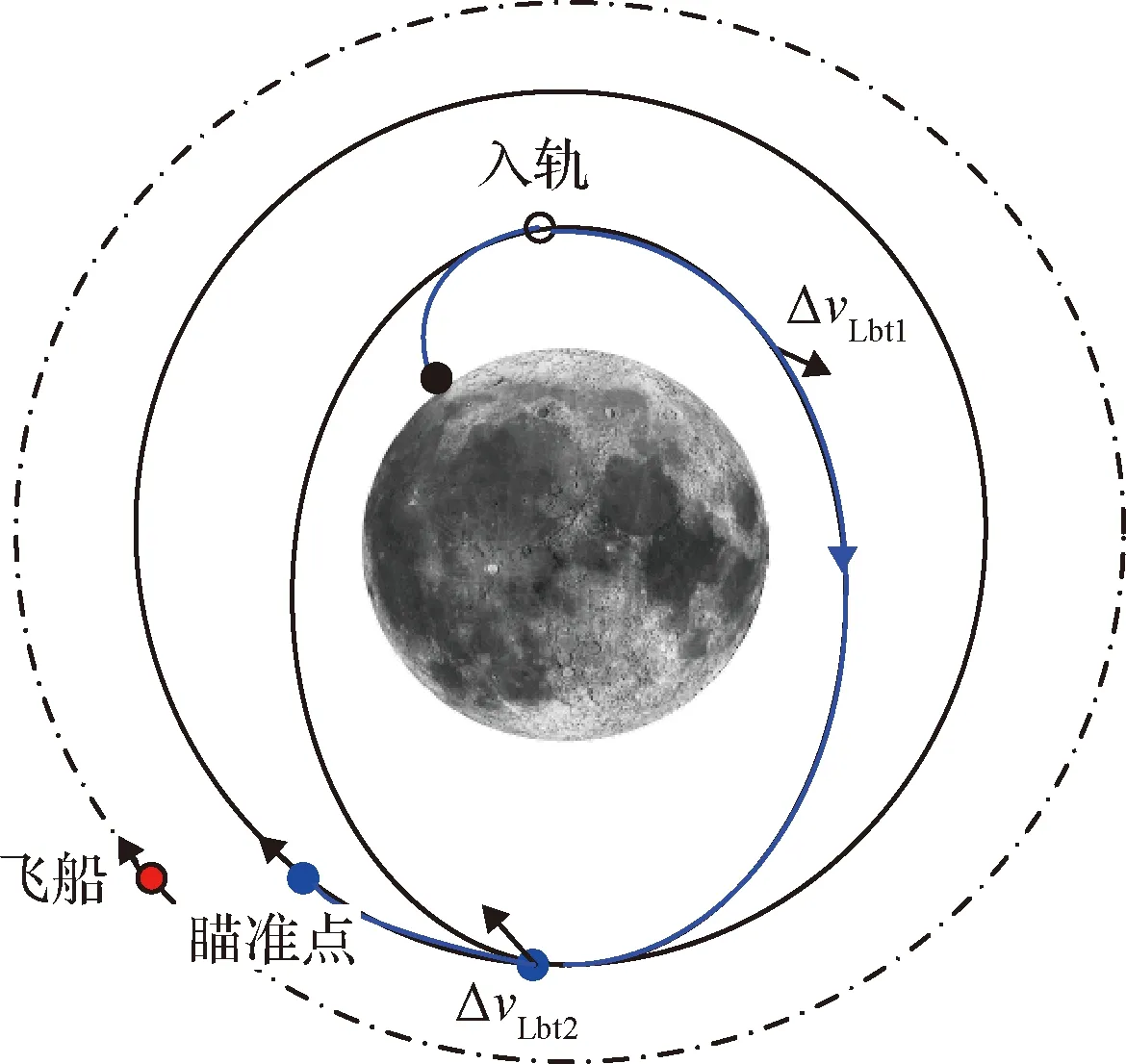
图14 基于兰伯特变轨的环月快速交会对接方案Fig.14 Lunar rapid rendezvous strategy based on the Lambert maneuver method
兰伯特变轨的速度增量需求与交会对接时长要求相关,一般来说初始相位偏差越大、交会时长越短,速度增量需求越大,如下式所示:
(13)
式中:ΔtLbt为兰伯特转移段时长;aLbt为兰伯特转移轨道半长轴;r1和r2分别为兰伯特转移的初始和末端月心距;c为初始和末端的月心矢量间弦长;v1和v2分别为兰伯特转移的初始和目标速度;vL1和vL2分别为兰伯特转移轨道的初始和末端速度;φL1和φL2分别为初始和末端的速度矢量夹角。
图15给出了兰伯特交会策略和霍曼交会策略在速度增量和交会时长的对比算例。算例中,在6°的初始相位差下,兰伯特交会策略通过增加63 m/s的速度增量可将交会时长缩短93 min,为应对该紧急模式的蓄电池、应急气瓶等配置可以减配,干重减少约30 kg,折合发射质量超过250 kg。
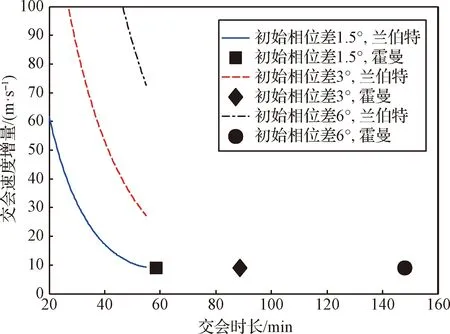
图15 兰伯特交会策略和霍曼交会策略对比Fig.15 Comparison between the Lambert and Hohmann rendezvous strategies
3.3 基于PRA的多重故障应对策略
载人月面着陆器在飞行全任务阶段具有多种故障模式。按照传统的推进剂分配方式,需要对每个飞行阶段的故障模式进行独立分析,逐一获取推进剂消耗量,再将每个飞行阶段中处置独立故障的推进剂消耗最大值按照飞行过程逐一加总,作为整个飞行器全任务阶段处置故障的预留推进剂。这种方法无疑会将不同飞行阶段相关故障模式进行重复累计,造成推进剂预留量过于保守。
提出基于概率风险评估(PRA)的多重故障推进剂预算方法,从飞行器的任务剖面出发,将事件树和故障树相结合,对正常和故障飞行场景进行建模,以准确识别可能出现的多重故障应急模式分支。
图16给出了基于事件树的载人月面着陆器多重故障应急模式分析示例。以“N_”标注的是正常事件,以“E_”标注的是应急事件。在示例的事件树中,共1个正常飞行模式和11个应急飞行分支,其中包含1种应急事件的分支有5条,包含2种应急事件的分支有5条,包含3种应急事件的分支有1条,不存在4种及以上应急事件组合的分支。

图16 载人月面着陆器的事件树建模示例Fig.16 An example of event tree modeling for a manned lunar lander
以正常飞行模式的推进剂使用量为基线,若按传统方法将处置应急事件的推进剂累加,需额外预留308 kg推进剂。按照事件树分析方法,11个应急飞行分支中需要推进剂最多的是包含3种应急事件的分支:“入轨偏差大+月面提前起飞+动力重构上升”分支,处置故障需额外消耗推进剂270 kg,比传统方法有所减少。
进一步采用PRA方法对应急飞行分支发生概率进行定量分析,若“入轨偏差大+月面提前起飞+动力重构”和“入轨偏差大+动力重构”2条应急分支的多重故障无相关性且发生概率极低,则可以作为系统残余风险,不额外预留推进剂进行处置。因此,在该示例中可以考虑将剩余的9条应急分支的最大推进剂消耗量作为系统处置故障的预留推进剂,为190 kg,仅相当于传统方法的62%。
4 结 论
围绕载人月面着陆器推进剂使用量控制这一核心目标,在正常、应急飞行策略中提出了一系列总体层次的优化思路,可为月面着陆器飞行任务规划和轨道设计提供借鉴和参考。在保证航天员安全的前提下,尽量实现月面运输能力的最大化,支持载人月球探测工程取得更多工程和科学成果。