载人月球探测一体化网络和协议架构设计与验证
2023-10-21何熊文陈朝基贾雨棽张柏楠徐明伟陈瑞勋
何熊文,陈朝基,贾雨棽,张柏楠,徐明伟,刘 岩,陈瑞勋
(1. 清华大学计算机科学与技术系,北京 100084;2. 北京空间飞行器总体设计部,北京 100094)
0 引 言
载人月球探测已成为航天领域的重要研究热点之一,远期将持续支持月球科研试验站等建设,全面进行月球资源的探索和利用。载人月球探测飞行器任务复杂,涉及多个航天器节点间大量数据交互,对通信速率、安全可靠、灵活自主的需求均大幅增加,需构建地月一体化网络,实现随时随地联网和操控、通信链路有效备份、多节点间协同等。因此,如何设计器地/器间/器内一体化网络架构,以实现多器协同、人-器协同以及以测量透明、控制开放、执行共享为核心的电气一体化设计,已成为目前载人月球探测网络构建的重大挑战。
本文针对载人月球探测的需求,提出一体化网络和协议架构及其器地、器间、器内应用场景,并通过多种手段对其中的核心协议进行了验证,为后续在任务中推广应用提供技术支撑。
1 国内外相关研究
1.1 载人月球探测网络架构研究现状
美国、欧洲、中国等均在开展载人月球探测网络架构的研究。
2020年,NASA空间通信和导航(SCaN)计划提出了月球网(LunaNet)概念,为月球探测任务提供网络通信、定位导航授时(PNT)、科学应用等服务。美国阿尔忒弥斯计划中,制定了载人月球探测的国际互操作标准[1],该标准基于时间触发以太网(TTE)构建,并辅以无线网络,应用核心飞行系统(Core flight system, cFS)软件架构,包含部分速率大于1 Gbps的点对点接口。
ESA提出了载人登月通信系统,对月面着陆器在月球正面、背面等场景进行了通信系统设计,拟构建地球、月球一体化的通信网络。同时针对航天器内部综合电子系统架构,欧洲于2007年启动空间综合电子开放接口体系结构(SAVOIR)[2]的研究工作,旨在建立综合电子系统的参考体系结构。该架构基于硬件模块组装,具备通用软件架构,大量应用空间数据系统咨询委员会(CCSDS)和欧洲航天标准化组织(ECSS)标准,已进入实施阶段,正在评估TTE和时间敏感网络(TSN)在航天器中的应用前景[3]。
与国外相比,国内在载人月球探测网络架构方面的研究,主要是在融合CCSDS标准和ECSS标准的基础上提出了一体化的网络架构,并探索高速数据总线在航天器中的应用前景。此外,为满足载人月球探测信息系统网络应用,迫切需要进行体系结构的合理设计,实现器地/器间/器内网络架构的一体化设计,为载人月球探测任务提供有力支撑。
1.2 网络协议架构研究现状
CCSDS于1982年发起成立,旨在建立一套既有技术先进性,又能够实现任务间、空间组织间和空间国家间资源共享的空间数据系统标准[4]。CCSDS以美国和欧洲为主导,已形成分层体系结构,涵盖多个技术领域,其制定的300余份标准已在全球超过1 000个航天器中得到应用,但空间和器内网络协议架构尚未统一。CCSDS制定的空间通信协议体系[5]包括应用层、传输层、网络层、数据链路层、物理层,已被广泛采用。CCSDS在航天器接口业务标准化方面的主要研究目标是通过定义一组标准化的业务接口和协议,实现对传感器、执行机构、通用航天器功能的标准化访问,并且使星载应用程序的开发独立于提供这些业务的机制,从而增加其在不同航天器中的重用率。目前已制定了航天器内部通信协议体系[6],正在开展电子数据表单(SEDS)标准的制定、无线网络规范的研究等。NASA于2020年9月提出互操作协议标准,融合了大量CCSDS和地面互联网的标准协议,作为美国阿尔忒弥斯计划国际合作的几大规范之一,有效实现了器地、器间协议的融合。
ECSS在兼容CCSDS标准基础上定义了更细的标准,并制定了遥测遥控包应用标准(PUS)[7],在CCSDS的空间包[8]协议标准基础上进一步规定了包的副导头结构和数据域结构,便于标准化地面和航天器之间的应用层接口[9]。
2 载人月球探测任务和地月一体化网络需求分析
2.1 需求分析
我国未来载人月球探测宏伟愿景,对一体化网络主要有如下需求:
1)建立地月一体化网络的需求。我国载人月球探测任务涉及飞船、着陆器等多个节点,需构建地月一体化网络,实现随时随地联网和操控、通信链路有效备份、多节点间协同等,器内高速总线通信速率不小于1 Gbps,测控通信上下行速率为十几kbps,高速通信上下行速率可达几十Mbps。
2)载人月球探测任务电气一体化的需求。载人月球探测任务构建高安全、高可靠、集成化、轻量化的一体化电气系统,其核心为测量透明、控制开放、执行共享,范围包括飞船/着陆器电子系统一体化设计,器地、器间接口和协议一体化,近地、地月、月球通信一体化等。
3)支持月球科研试验站建设的需求。未来将建造月球科研试验站,作为科学实验、资源开发利用以及地外天体长期生存能力的研究平台,开展系统、连续的月球探测和相关技术试验验证。因此有必要在月球科研试验站建造前开展与高速科学载荷通信、月地高速激光通信、月面高速组网通信相关的关键技术研究和验证。
4)支持未来国际合作的需求。我国载人月球探测任务后续在月球科研试验站建设、月面机器人、科学载荷、地面交互支持等方面都将面临国际合作,需要研究建立相应的通信规范。国际合作将面临合作开发月球科研试验站、使用国外地面站、对国外机器人提供业务支撑、支持搭载国外载荷等需求。
5)提升载人月球探测国际标准制定话语权的需求。目前载人月球探测任务网络涉及月面自组织通信、空间和器内一体化通信、网络管理、月地高速激光通信、自适应网络路由、航天器内部设备即插即用、航天器内部任务迁移等多个技术,而上述技术的国际标准尚属空白,可通过任务牵引,专项研究制定相关标准,在CCSDS等国际标准化组织中提出中国标准[10],提升我国在国际标准制定的话语权。
2.2 任务分析
载人月球探测任务首先采用月面着陆器登陆月球,在月面进行采集样本等作业后,航天员再乘坐飞船返回地球,可实现2~4人的月面活动,还计划利用载人月球车或月面机器人进行挖掘或探索工作。未来还将建立可长期驻留的月球科研试验站和覆盖范围广的月球通信星座,涉及多节点间的高速数据通信需求。一体化网络和协议架构需支持的主要任务可分为以下几类:
1)地面统一操控:地面可对任一飞行器进行统一操控和监控,提供航天器对用户的统一高级操作接口,支持地面用户对其他航天器的统一操控,支持地面监控软件的统一。
2)航天员任意操控:航天员可以在任意位置在轨操控任一航天器,例如飞船上航天员操控着陆器、着陆器上航天员操控机器人等。
3)地面跨多节点操控:可无需关心航天器位置,支持自主路由。例如地面远程操控月面机器人,只需指定目的端,由航天器自主路由进行数据传输。
4)跨节点协同:任意两个节点之间均可实现通信、信息共享和自主协同。
5)故障下替代控制:某一航天器控制器故障,其它航天器控制器可替代,例如着陆器控制计算机故障时用飞船对着陆器进行控制。
6)灵活支持各种设备:支持设备即插即用和在任意航天器间更换,例如新增一个科学试验设备、试验设备由飞船更换到着陆器等。
7)智能自主管理:对智能化要求更高,包括自主热控/能源/网络/内务管理等,实现航天器采集-控制-执行的智能自主闭环控制。
3 载人月球探测地月一体化网络架构设计
3.1 总体架构
3.1.1设计原则
根据我国载人月球探测需求和任务分析,按照以下理念开展载人月球探测任务一体化网络和协议架构设计:①一体化,空间和器内一体化、各航天器一体化;②分层化,支持技术更新换代、支持扩展和升级;③通用化,基于标准模块和通用构件实现硬件、软件的通用;④标准化,大量采用国际先进标准协议,支持未来国际合作。
3.1.2网络拓扑架构
为支持未来载人月球探测任务,构建如图1所示的涵盖月地网、环月网、月面网,三网一体的地月一体化网络。其中,月地网包括了地球以及地球与月球轨道之间的航天器网络,是环月网与地球网之间的通信系统;环月网包括了月球轨道的载人飞船或其他卫星,是月面网与地月网间的通信系统,以支持月面网与月地网间的通信;月面网是以月面着陆器为通信中心,支持舱外活动的航天员、月球车通信终端接入的月球基地局域网。通过地月一体化网络完成地月多网一体的协同通信。
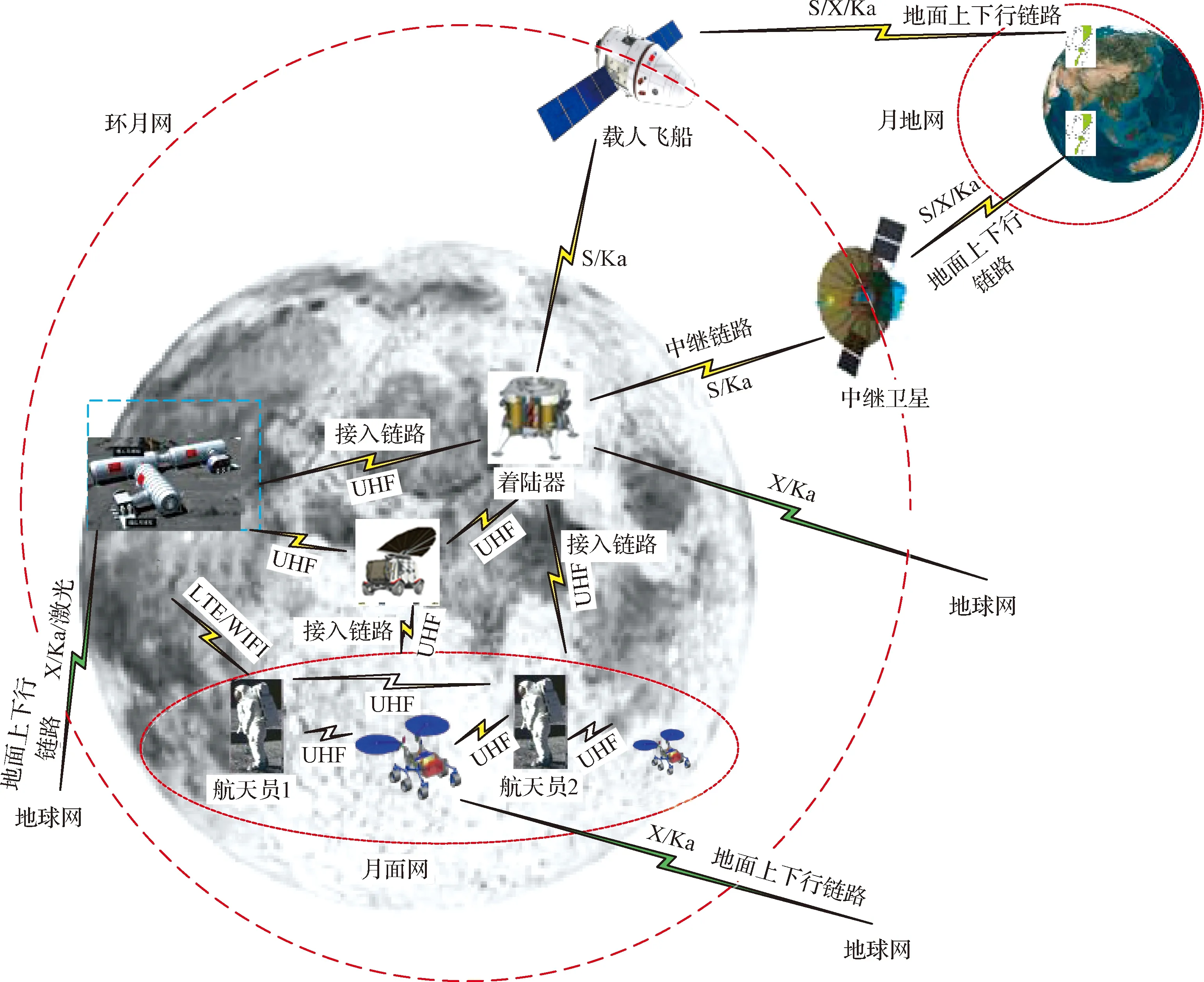
图1 地月一体化网络拓扑结构Fig.1 Topology of Earth-Moon integrated network
器内网络拓扑结构如图2所示。网络拓扑按照智能化程度分为高级智能节点、交换/网关节点、简单智能节点和非智能节点4类。高级智能节点主要是指器载管理计算机,负责完成系统级任务管理和姿态控制等功能;交换/网关节点包含高速交换机、高速通信单元、舱内/月面无线网关、载荷网关和对接网关等;简单智能节点包含各分系统智能终端、存储器、传感器、执行机构以及无线话音、无线键盘和科学载荷等;非智能节点包含整器其他的非智能化的传感器和执行机构。整器信息系统网络由器载管理计算机通过高速数据总线和1553B两种总线实现所有节点设备的互联互通和统一管理。
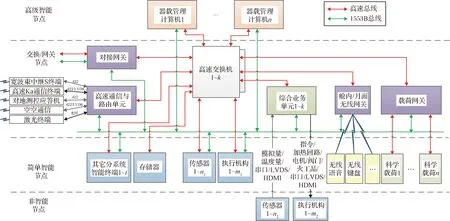
图2 器内网络拓扑结构Fig.2 Spacecraft internal network topology
3.1.3网络协议架构
载人月球探测地月一体化网络的协议架构[11]如图3所示。该架构包括:
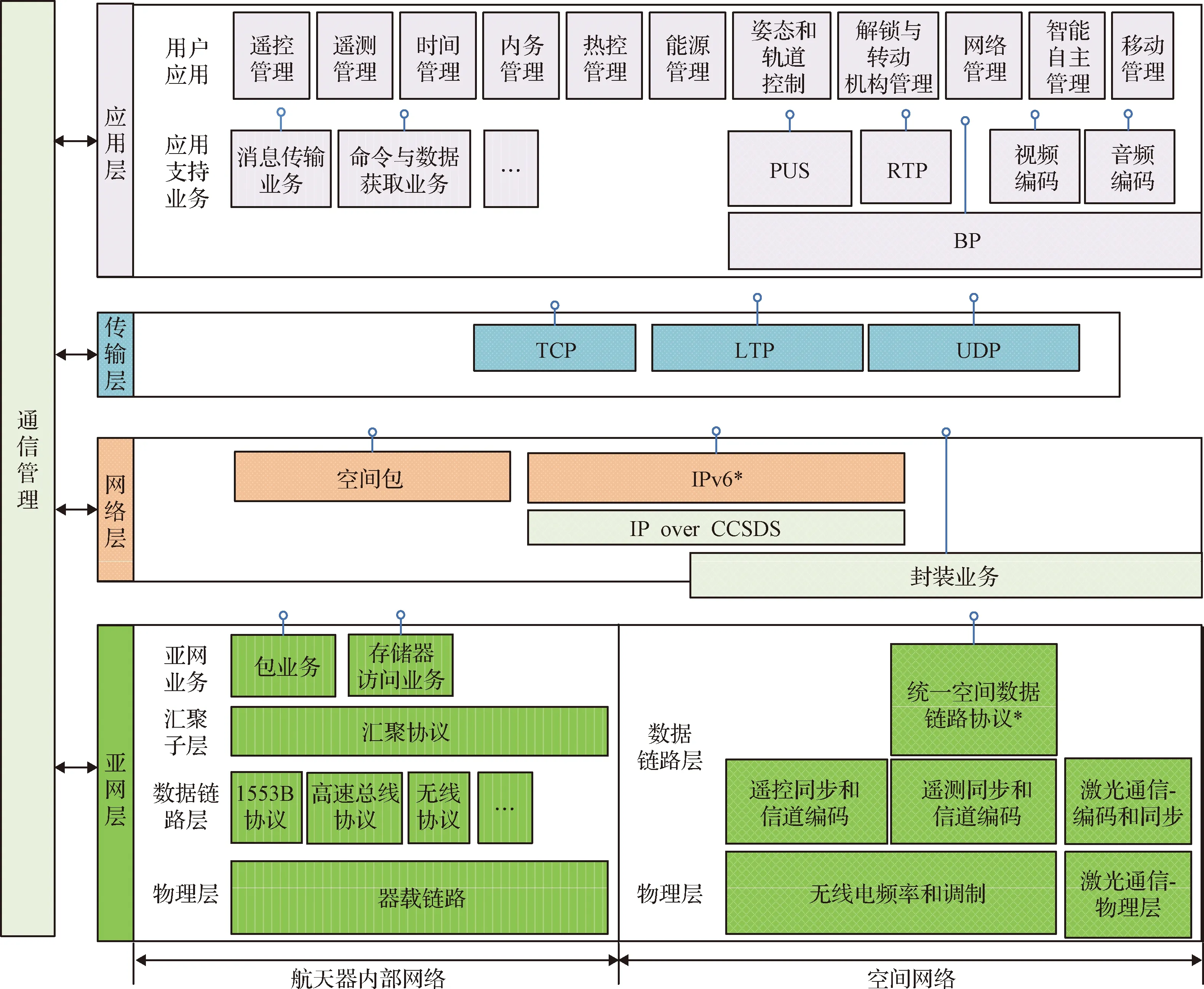
图3 载人月球探测一体化网络协议架构Fig.3 Integrated network protocol architecture for China’s manned lunar exploration
1)应用层
分为用户应用和应用支持业务。用户应用包括遥测管理、遥控管理、热控管理、能源管理、时间管理、解锁与转动机构管理、内务管理、智能自主管理等各类航天器应用。应用支持业务(如表1所示)为通用化业务,对用户应用的各类智能化应用提供基础支撑。通过将用户应用与应用支持业务分离,实现任务相关部分轻量化,通过更改任务参数配置代替特定任务的编程。通用支持部分通过抽象和归纳形成灵活的通用服务支持机制,同时提供开放的扩展机制,满足任务特殊要求。
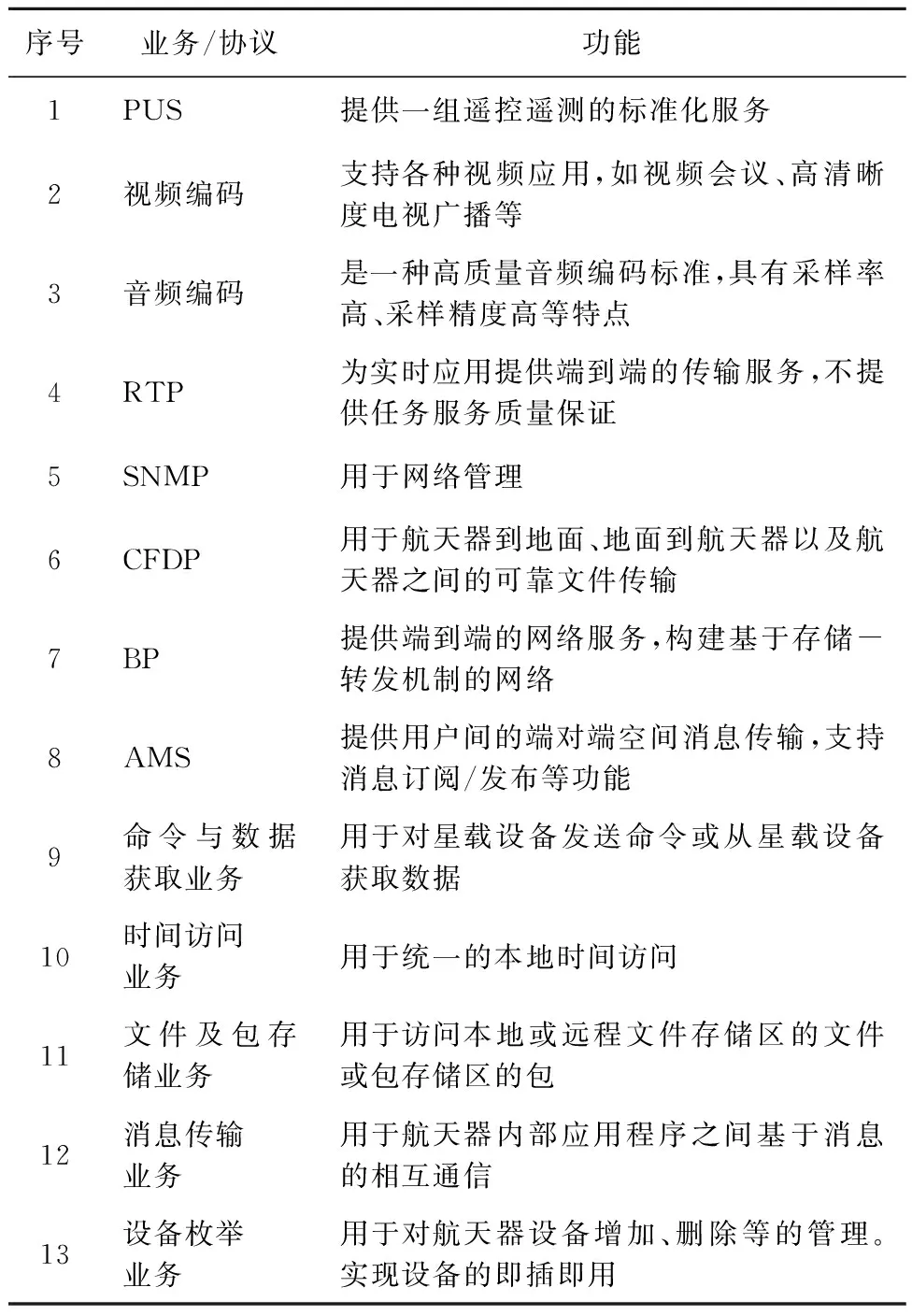
表1 应用支持业务功能描述Table 1 Function description of application support services
2)传输层
提供可靠传输和不可靠传输两种业务。不可靠传输业务采用UDP协议,当需要进行数据的传输确认时,可通过应用支持层的PUS遥控确认业务或应用层的应用特定协议实现;可靠传输业务采用TCP、LTP[12]等。
3)网络层
支持器地、器间、器内、月面网络的一体化路由,实现两个网络系统中的数据透明传送,同时提供网络的管理功能,具体包括路由选择、动态接入等。网络层兼容地面IP协议和CCSDS的封装业务、空间包协议、IP over CCSDS(IPoC)协议[13-14]等。
4)亚网层
分为空间通信和器内通信两部分,可屏蔽底层空间链路以及器内链路的差异,对上提供统一的业务接口。
空间网络在亚网层对应CCSDS空间通信协议模型的数据链路层和物理层,目前CCSDS开发了新的USLP协议[15],吸收了AOS[16]、TC[17]、TM[18]、邻近空间链路协议[19]等数据链路层协议的优点,是准备未来统一应用的协议。此处考虑采用USLP以及与之配套的遥控同步和信道编码、遥测同步和信道编码、激光通信-编码和同步。在物理层,则考虑激光和微波混合的通信体制,因而包含无线电频率和调制、激光通信-物理层等两种CCSDS定义的协议。
器内网络在亚网层对应CCSDS星载通信协议模型的亚网层。该层主要考虑提供统一的接口,通过汇聚层协议对上层屏蔽底层链路的不同。汇聚层设计时根据底层数据链路层的不同有所区分,若数据链路层协议能完整支撑亚网层各业务,则汇聚层可直接将亚网层各业务与数据链路层对应的协议关联;若数据链路层只支持部分业务,则在汇聚层针对该链路补充设计相关协议,与数据链路层共同完成亚网层的业务支撑。结合目前使用的需求,应用包业务[20]进行星载链路包的传送,应用存储器访问业务[21]进行挂接在星载链路上节点的存储器/寄存器的访问。器内不同的总线和接口均有标准化的数据链路层和物理层协议,对汇聚层和上层业务提供支持。
3.1.4总体架构特点
载人月球探测地月一体化网络总体架构具备以下特点:1)采用分层架构、支持协议扩展、升级;2)支持CCSDS和ECSS先进标准,便于国际合作;3)实现遥测遥控、器内通信从应用层到亚网层的全协议栈标准化;4)实现对不同种类的设备、文件的标准化访问;5)空间和器内网络融合,支持跨网络信息共享;6)支持多种传输质量。
3.2 器地通信协议应用方案
在早期载人登月任务中,由于通信数据量需求较小,月面通信用户数量少,因此可以选择数据路由能力为10~100 Mbps的小型通信终端,配置小型天线,月面覆盖距离几千米到几十千米左右即可。到了月球基地阶段,数据量、通信用户数量大大增加,需采用大型月球通信终端,数据路由能力将达到几百Mbps,可配置大型测控及数传天线,支持月面覆盖距离将达几十千米以上,支持1 Gbps以上的数据传输。
器地一体化网络通信协议主要特点:①通过应用层PUS统一遥控、遥测应用层级别的数据格式,并提供丰富的操控功能;②通过数据链路层的USLP统一前向、返向协议,并与数传链路、器间链路均统一,从而便于实现器地、器间一体化和产品统一。针对载人所特有的视频音频协议配置进行设计,数传音视频双向协议配置如图4所示。图中,应用层采用视频编码、音频编码、RTP协议,传输层采用UDP协议,网络层采用IPv6协议、IPoC协议以及封装业务进行数据传输,亚网层采用USLP协议通过空间链路进行传输,采用高速数据总线进行星内数据传输。
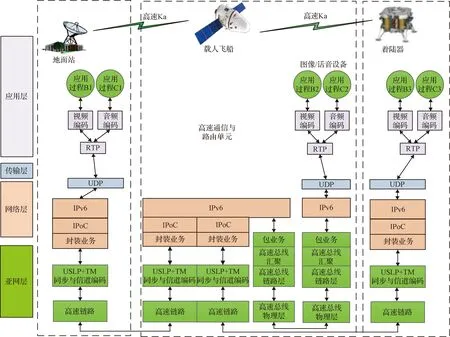
图4 音视频双向协议配置Fig.4 Audio and video bidirectional protocol configuration
3.3 器内一体化通信协议应用
器内一体化通信协议主要特点:①通过应用层的PUS统一器内各设备间交互的遥控、遥测应用层级别的数据格式;②通过消息传输业务(MTS)实现器间各智能设备间的信息共享,简单智能设备/非智能设备的访问统一通过命令与数据获取业务完成;③平台骨干网络出于高可靠、高确定性需求选用速率为1 Gbps的高速数据总线,同时出于可靠性考虑,选用1553B总线作为备份;④载荷骨干网络出于高带宽需求以及为未来月球科研试验站作技术储备,选用时间敏感网络;⑤其它接口如异步串口、指令、遥测等统一通过综合业务单元进行转换后接入高速数据总线。
器内高速、低速网络协议架构分别如图5、图6所示,其特点为:通过PUS统一交互的应用层数据格式,通过消息传输业务实现信息灵活共享,通过高速数据总线构建高速网络,通过1553B进行关键链路备保传输,可实现器内与空间的一体化组网,支持任务迁移。
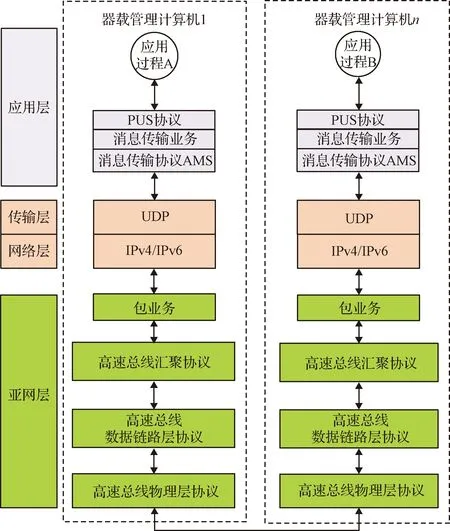
图5 器内高速网络协议配置Fig.5 High-speed network protocol configuration inside the spacecraft
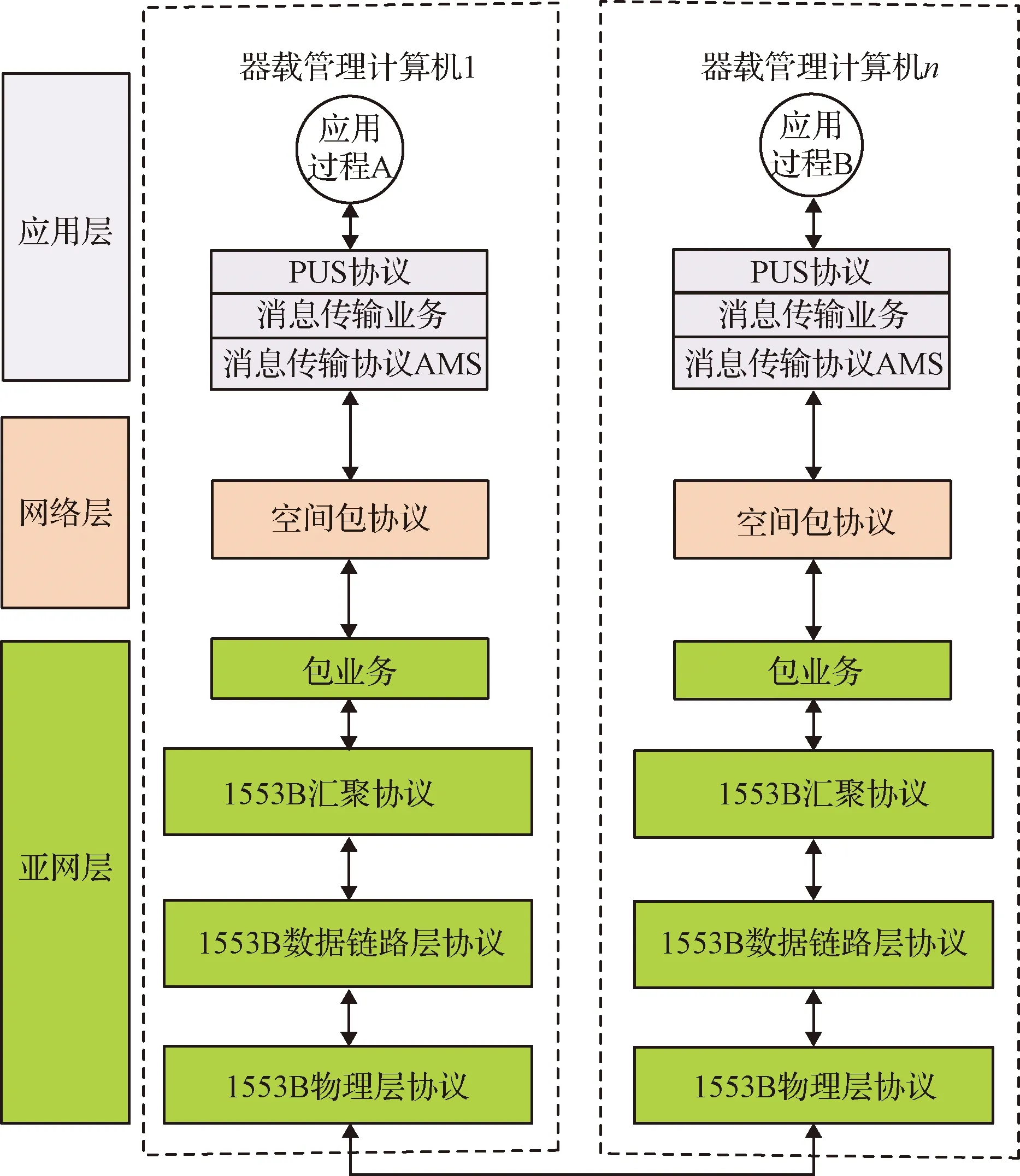
图6 器内低速网络Fig.6 Low-speed network protocol configuration inside the spacecraft
图7、图8为通过命令与数据获取业务对简单智能节点/非智能节点进行统一访问的协议架构。
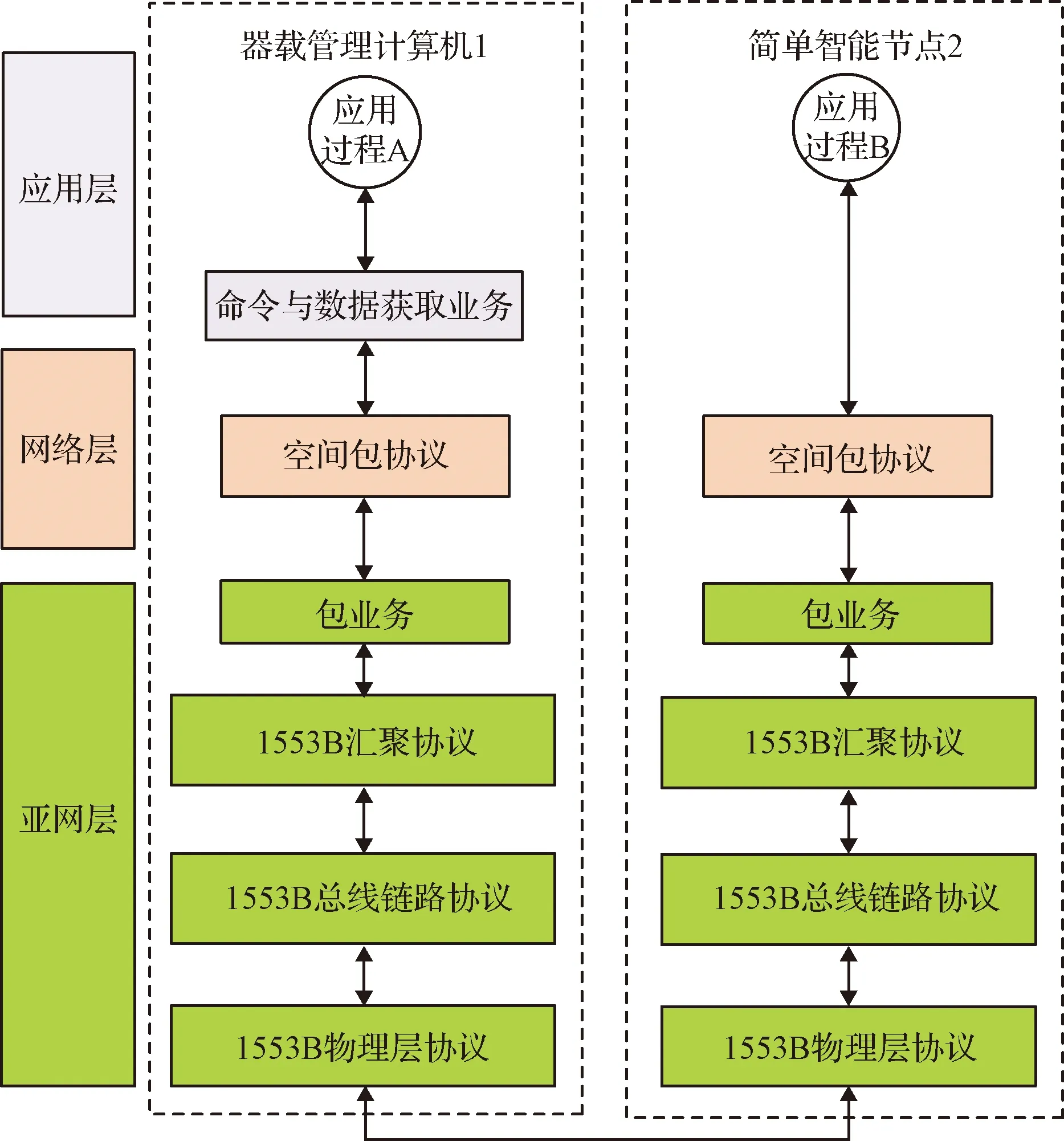
图7 器内智能节点与简单智能节点之间通信协议Fig.7 Protocol configuration between smart and simple nodes inside the spacecraft
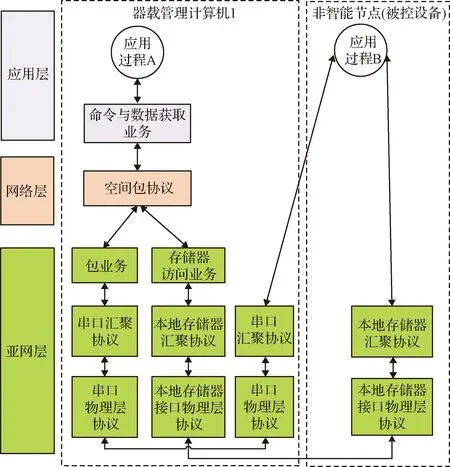
图8 器内智能节点与非智能节点之间通信协议Fig.8 Protocol configuration between smart and non-smart nodes inside the spacecraft
应用上述协议可实现信息系统的测量透明、控制开放、执行共享,具体方案如下:
1)测量透明:若传感器为简单智能单元/非智能单元,挂在综合业务单元上,综合业务单元采集所有直接连接的传感器数据,在网络内进行发布。控制器(例如器载管理计算机)对需要的传感器数据根据主题进行订阅,当对应主题的数据在网络发布时,所有订阅的控制器均能收到一份拷贝。若传感器与高速交换机连接,分两种情况,一种是高级智能传感器,则其将自身数据周期性在网络内发布,另一种是简单智能传感器,则将数据发往系统管理单元,后者将其数据在网络内进行发布。
2)控制开放:控制器通过对传感器数据的订阅实现对任意传感器数据的获取。控制器内运行的控制任务依据特定的控制算法进行处理,生成执行命令发往网络中对应的执行机构。控制任务的相关参数可以周期性保存在大容量存储器中。当对应控制器异常时,其它控制器监测到主控制器异常时,启动对应的控制任务,并从大容量存储器中取回控制任务相关参数进行配置,该控制任务将重新订阅对应传感器数据并执行控制任务,替代原控制器工作,实现任务的迁移。
3)执行共享:若执行机构为简单智能单元/非智能单元,可挂在综合业务单元上,综合业务单元可接收控制器的命令或自主产生命令发往执行机构。若执行机构与高速交换机连接,当其为高级智能执行机构时,则可通过订阅的形式获得任意控制器发布的指令。当其为简单智能传感器时,则可直接接收控制器发来的指令。
3.4 器间网络通信协议应用
器间通信协议的要考虑支持飞船、着陆器的器间通信,支持月面节点的自主接入,支持多跳可靠传输。一种典型的载人月球探测多器间通信协议配置的场景如图9所示。各层的协议配置情况如下:应用层采用PUS协议、视频编码、音频编码、AMS、RTP协议;传输层应用UDP协议;网络层应用IPv6协议;亚网层数据链路层采用USLP空间数据链路协议,物理层包括Ka频段、S频段、激光、UHF、WiFi等多种体制。其主要特点:①通过应用层PUS统一器间各设备间交互的遥控、遥测应用层级别的数据格式;②通过异步消息业务(AMS)实现器间各智能设备间的信息共享;③通过IP实现器间网络层通一,并实现器间/器地一体化;④链路层通过USLP统一。
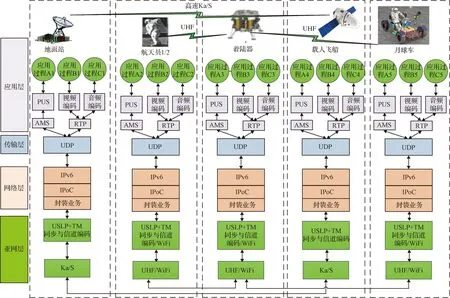
图9 多器间通信协议配置情况Fig.9 Protocol configuration for communication between multiple spacecraft
3.5 小 结
通过上述器地通信、器内一体化通信、器间网络通信的应用设计,可得出以下结论:
1)应用层中用户应用部分业务与领域具体航天器相关,需有专用协议;应用支持业务可各航天器通用;
2)传输层均可各航天器通用,支持可靠传输/不可靠传输;
3)网络层兼容空间包和IP,可实现空间和器内一体化;
4)亚网层空间通信部分统一使用USLP,器内通信部分统一使用包业务屏蔽底层链路差异,总线建议采用高速数据总线与1553B总线并存的方式。
4 载人月球探测地月一体化网络架构验证
由于地月一体化网络架构涉及了多层次、多种类的协议,在不同的航天器中一般会根据需要进行优选或剪裁。为此,北京空间飞行器总体设计部构建了地月一体化网络半实物仿真评估系统,可对网络拓扑架构、网络协议进行仿真和分析评估。目前该系统重点针对协议架构中的空间通信协议进行仿真,其他器内通信协议将通过在轨任务进行飞行验证。
4.1 地面验证
地月一体化网络半物理仿真评估系统对BP、LTP、TCP、UDP、IPv6、IPoC、封装业务等空间通信协议进行了地面测试验证,其系统拓扑和实物组成分别如图10、图11所示。系统包括服务器、软件定义路由器、普通交换机、仿真平台主控、物理节点主控、接入网关节点模拟器原理样机、组网节点模拟器原理样机等。系统支持的模型覆盖飞船、着陆器通信节点,支持对网络场景仿真和协议模拟,支持对网络时延、误码、带宽等的性能评估。
以LTP、BP协议为例说明其具体验证过程。针对地月空间网络场景设计骨干网、接入网、地面站以及终端用户的仿真场景,在虚拟或物理节点上根据需要加载运行LTP、BP协议栈及应用程序;利用STK软件针对仿真场景进行建模,建立网络协议、数据量、数据传输方案等数据业务模型;建模完成后,各链路的通断信息和链路特性数据存储至数据库中,分别等待主控器和SDN控制器读取。业务建模的信息被加载至前端界面中,等待用户通过前端交互进行具体的配置;仿真实验启动后,实验节点正常创建,场景正常运行;选取地月各一个节点,一个为发送节点,一个为接收节点,传输视频或文本业务,接收节点可以成功接收,即验证了协议运行的正确性。
4.2 在轨飞行验证
协议架构中的UDP、IPv6、IPoC、封装业务、遥控同步和信道编码、遥测同步和信道编码、1553B等协议已经在载人航天等多个领域航天器分别进行了在轨验证。此外器内通信的部分协议已在某遥感卫星上完成了在轨飞行验证,该卫星的协议配置如下图所示。该卫星首次应用融合CCSDS SOIS和ECSS PUS的协议,支持信息订阅发布、空间和器内一体化路由寻址,支持业务组合实现各类功能,软件构件代码率达75%以上。该卫星验证的主要协议,后续将在载人登月飞行器中使用。
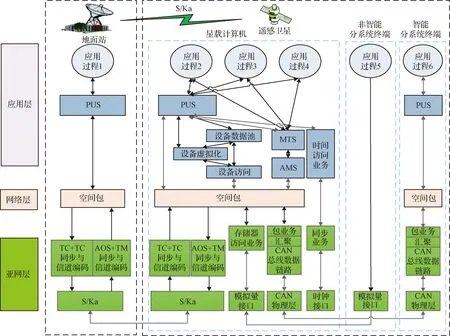
图12 某遥感卫星协议配置Fig.12 Protocol configuration of a remote sensing satellite
4.3 标准协议验证情况
通过地面验证和在轨飞行验证,目前除部分尚未有产品的协议标准外,已对协议架构中涉及的协议标准进行了全面覆盖,如表2所示。
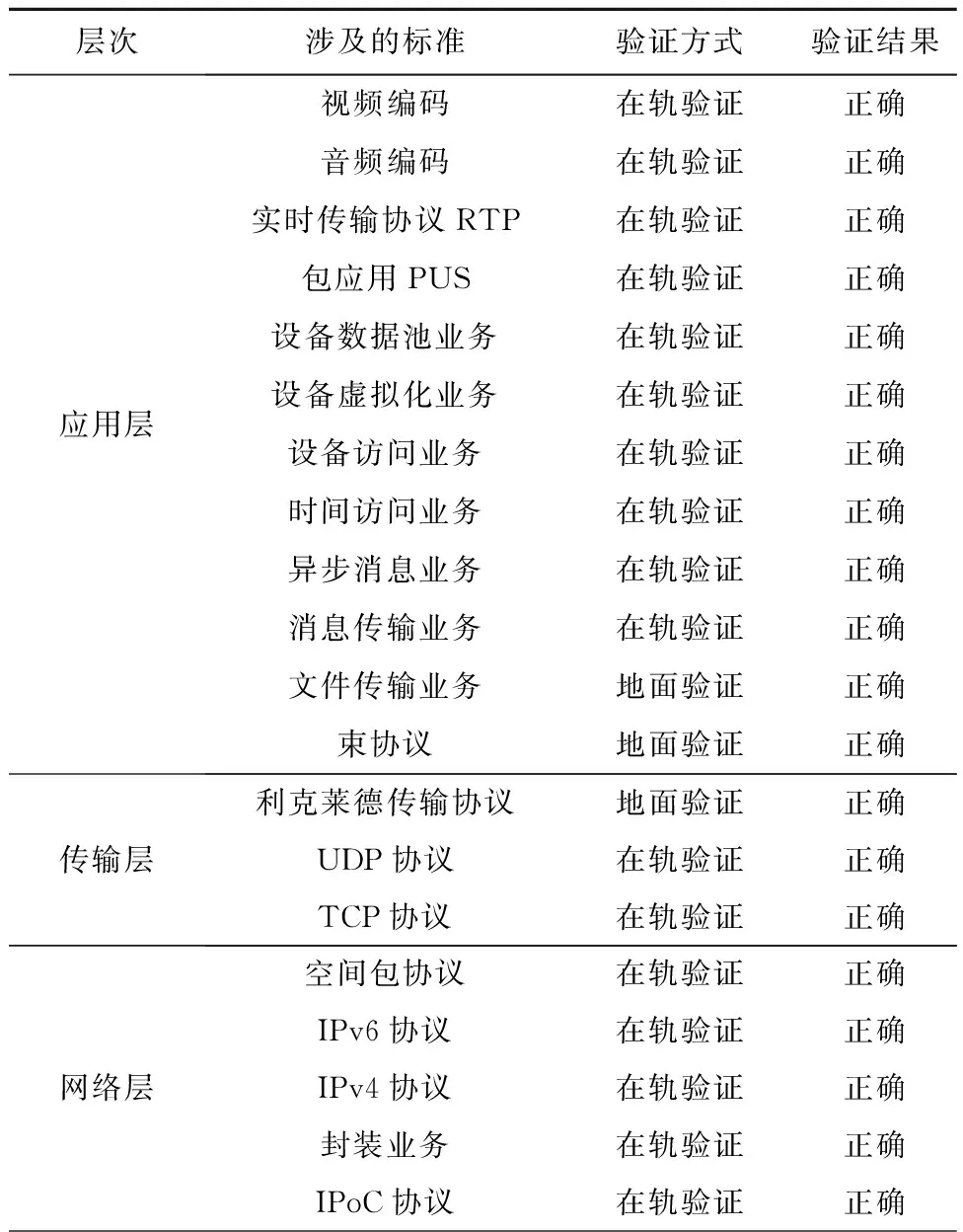
表2 载人月球探测任务一体化网络协议验证情况Table 2 Verification of integrated network protocol for manned lunar exploration missions
5 结 论
面向载人月球探测任务一体化网络需求,构建了一体化、分层化、通用化、标准化的协议架构,可以实现测量透明、控制开放、执行共享,有利于促进网络的接口标准化、产品通用化,提升航天器的智能化和网络化水平,支持后续网络系统的扩展和升级,为载人月球探测任务奠定基础。