一种低频超宽带脉冲探地雷达天线设计
2023-10-20梁平乐樊易航刘溢成李建星
梁平乐,樊易航,刘溢成,李建星,陈 娟
(西安交通大学 信息与通信工程学院,西安 710049)
探地雷达可对地下目标进行推测性搜索,在公路质量检测、地下管线探测及地球物理调查等行业中得到了广泛应用[1]。天线是探地雷达系统中极为重要的部件。在探测深层目标时,由于地下为有损耗的非均匀介质,频率越高,损耗越大,需天线工作在相对较低的频率,需增加天线的尺寸。同时,为获得高分辨率,脉冲探地雷达辐射信号为极短脉冲,频率占据很宽的频带,需天线具有超宽带宽。如信号拖尾严重,微弱的回波将被淹没,难以提取分析,所以探地雷达天线还需具有低振铃效应。以上需求给探地雷达天线的设计带来了很大的挑战。
目前,探地雷达应用的主要天线类型有喇叭天线、vivaldi天线、偶极子天线、螺旋天线和蝶形天线等。喇叭天线[2-3]和vivaldi天线[4-5]方向性好,时域特性良好,但剖面较大。偶极子天线虽结构简单,但存在方向性低、带宽窄的缺点。为增加带宽,往往采用增加天线臂的宽度[6]或电阻加载[7]的方式,但会带来尺寸大或效率低的问题。螺旋天线[8]同样具有超宽带特性,但因相位中心不固定,辐射信号拖尾严重,在脉冲探地雷达系统中使用较少。蝶形天线具有结构简单、剖面低、带宽大及线性相位等优点,所以对于蝶形天线的研究也最广泛。蝶形天线是双向辐射,往往需加载屏蔽腔[9]或反射器[10]来提高方向性,这会占据较大的空间,因此,工作在低频的探地雷达天线大多为非屏蔽天线。文献[9,11]对天线进行小型化的同时也使输入阻抗变大,需额外的平衡与不平衡阻抗转换器来实现阻抗匹配,平衡与不平衡阻抗转换器的插损降低了天线的实际增益,也给系统增加了复杂度。
本文提出了一款振子呈半椭圆状的蝶形天线,通过尽可能增加辐射面积的方式,使振子的特性阻抗随频率基本保持不变,增加了带宽[12],同时,对蝶形天线的振子进行椭圆化处理也使天线可直接与50 Ω同轴线匹配。本文设计的天线工作频率低、带宽宽、时域特性良好,剖面小、馈电简单,可实现远距离高分辨率探测,易推广到更多探地雷达应用中。
1 天线设计
蝶形天线可视为从馈电点均匀扩展的传输线。设计蝶形天线时,计算天线臂长L和振子张角θ时的经验公式可表示为[12]
(1)
(2)
其中:λ为对应最低工作频率的波长;Zc为天线的特性阻抗。由式(1)和式(2)可知,蝶形天线的臂长决定了最低工作频率,臂长越长,工作频率越低;蝶形天线的特性阻抗只与张角有关,增大张角可使天线易与50 Ω同轴线匹配,但与此同时,天线的尺寸也会越大。若要在实现超宽带特性的基础上,保持天线的小尺寸,可对蝶形天线的振子进行椭圆化处理[13],椭圆形状的天线为电流提供了一个平滑的路径,也降低了振铃效应[14]。
1.1 天线结构
本文所提出的蝶形振子天线的结构如图1所示。该天线对传统蝶形天线的振子进行了椭圆化处理。该天线的两臂分别位于介质基板的两侧,顶点之间的间距为2.5 mm;介质基板采用常见的FR4材料,相对介电常数为4.3,损耗角为0.02,厚度h为 2 mm;椭圆的长半轴a为265 mm,短半轴b为240 mm;天线整体长度l为530 mm,天线的宽度w为483 mm。正面的半椭圆振子顶点处延伸出来一条长l1为6.77 mm,宽w1为2 mm的馈线。基于这条馈线,可将蝶形天线正面的振子和背面的振子通过同轴端口连接起来。同轴端口的内导体直径din为1.27 mm,外导体直径dout为2.9 mm。
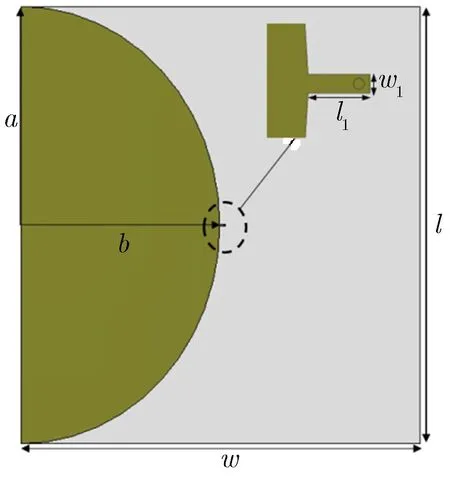
(a) Top view
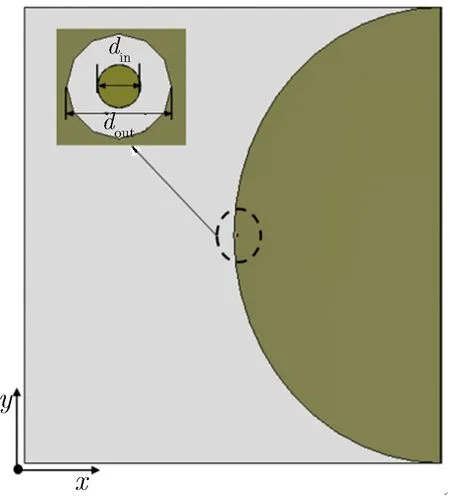
(b) Bottom view
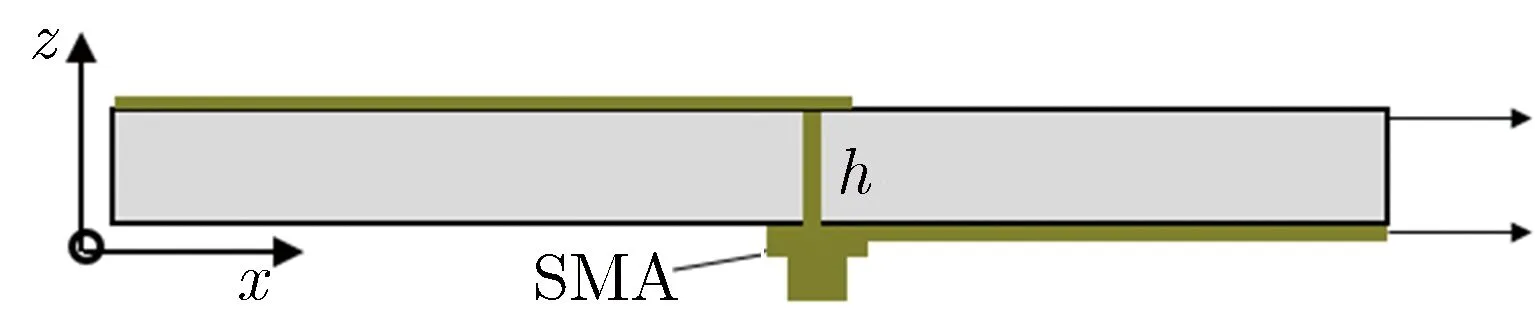
(c) Side view图1 蝶形振子天线的结构图Fig.1 Structure of the bow-tie antenna
1.2 仿真结果
采用CST软件仿真得到的蝶形振子天线的反射系数S11随频率f的变化关系如图2所示。由图2可见,该天线在180 MHz ~ 3 GHz频段上具有多个谐振点,对应振子上不同长度的电流路径。天线的反射系数在该频段范围内都低于-10 dB,相对工作带宽达到了177%。
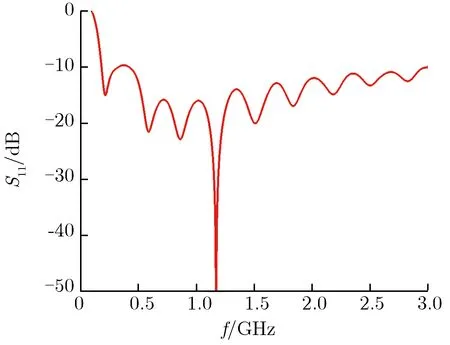
图2 蝶形振子天线的反射系数随频率的变化关系Fig.2 S11 vs. f
除了天线的工作带宽外,天线效率和增益也是衡量天线辐射能力的重要指标。蝶形振子天线效率和增益的仿真结果如图3所示。
由图3可见,天线效率大于85%,这说明天线本身的损耗很低,匹配也较好。天线的效率随频率的升高而缓慢减小,当频率为3 GHz时达到最低点,工作频段内的最小值约为77%。当频率为180 MHz~ 3 GHz时,该蝶形天线的增益基本上都大于2 dB,最大值为7.5 dB,且随着频率的增大,工作波长变小,天线有效面积相对变大,增益也变大。
蝶形振子天线的2维辐射方向图仿真结果如图4所示。
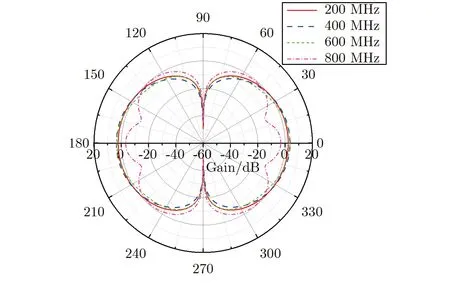
(a) xOz plane (phi = 0°)
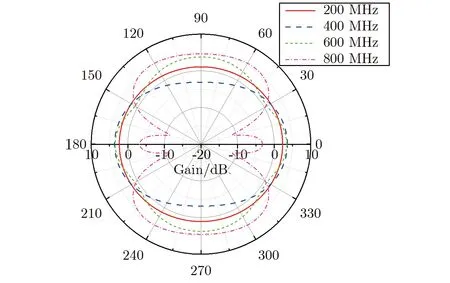
(b) yOz plane (phi = 90°)图4 蝶形振子天线的2维辐射方向图仿真结果Fig.4 Simulated two dimensional radiation patterns of bow-tie antenna
由图4可见,频率为200 MHz时,天线的辐射方向图与偶极子天线的方向图类似;频率为400 MHz时,天线在z轴方向上的增益增大了约1.1 dB,y轴方向上的增益则减小了约6.5 dB;频率为600 MHz时,天线分裂出了多个辐射峰,z轴方向上的增益只提高了0.3 dB,而y轴方向上的增益提高了约7 dB,此时y轴与z轴方向上的增益相差不大;频率为800 MHz时,天线分裂出更多波瓣,且最大辐射方向彻底偏离法向方向,因此使用天线法向方向探测时,天线的工作频率要低于800 MHz。
2 天线的加工与测试
图5为蝶形振子天线实物图,表面进行了防氧化处理。其中,SMA端口的内导体穿过FR4介质基板与正面半椭圆振子延伸出来的短馈线焊接在一起,外导体则与天线背面的半椭圆振子连接。天线的反射特性测试使用的是安捷伦公司生产的矢量网络分析仪Agilent E8363B,蝶形振子天线反射系数的仿真与测试结果对比如图6所示。由图6可见,测试结果给出天线的最低工作频率为180 MHz,与仿真结果吻合,且随着频率的升高,谐振点处开始出现轻微的频率偏移。
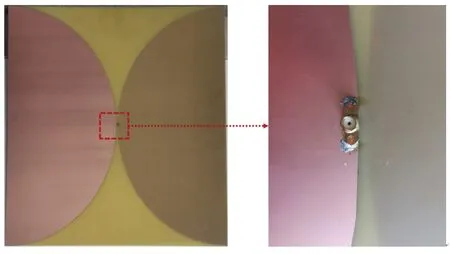
图5 蝶形振子天线实物图Fig.5 Prototype of bow-tie antenna
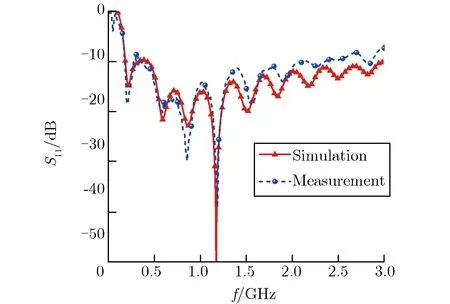
图6 蝶形振子天线反射系数S11的仿真与测试结果对比Fig.6 Comparison of simulation and measured results for S11 of bow-tie antenna
图7为蝶形振子天线放置于在多探头球面近场测量系统的位置。
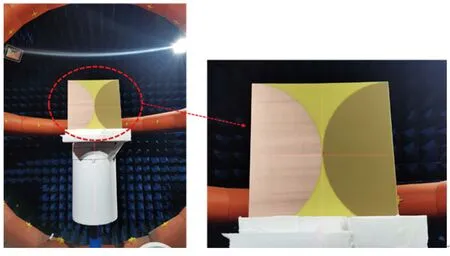
图7 蝶形振子天线在多探头球面近场测量系统的位置Fig.7 Bow-tie antenna placed on multiprobe spherical near-field measurement system
天线其他电参数使用多探头球面近场测量系统测得。由于转台的存在,暗室的正下方不存在探头。为获得更准确的天线法向方向上的辐射特性,测量时将天线直立摆放,并将天线的中心点对准两条相互垂直的红色光线的交点。暗室对该天线的最大测量频率范围为400 MHz~2 GHz,因此,只在此频率区间对天线辐射特性进行测试。
蝶形天线总效率和增益的测量与仿真结果对比分别如图8和图9所示。
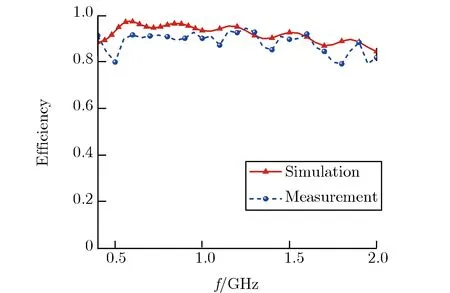
图8 蝶形振子天线总效率的仿真与测试结果对比Fig.8 Comparison of simulation and measured results for the total efficiency of bow-tie antenna
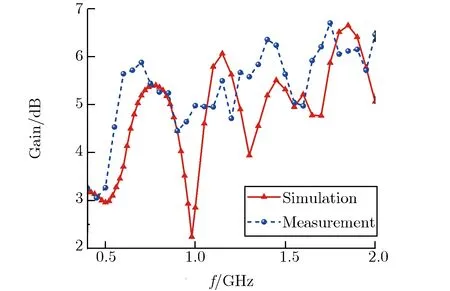
图9 蝶形振子天线增益的仿真与测试结果对比Fig.9 Comparison of simulation and measuredgain of bow-tie antenna
由图8可见,测试得到的总效率曲线整体上比仿真结果曲线略低,但基本都大于80%,且仿真和测试曲线随频率的变化趋势一致,均随频率升高而波动减小。由图9可见,增益的测试结果与仿真结果吻合较好,在520 MHz ~2 GHz频带内,该蝶形天线的增益均大于4 dB。
频率为400 MHz时,蝶形天线在xOz面2维辐射方向图的仿真与测试结果对比如图10所示。
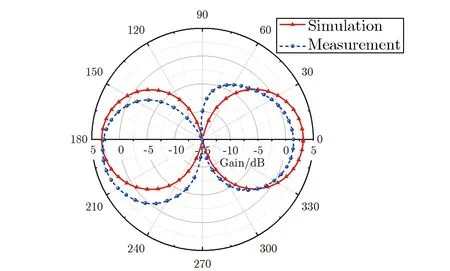
图10 频率为400 MHz时,蝶形天线在xOz面2维辐射方向图的仿真与测试结果对比Fig.10 Comparison of simulation and measured results of two dimensional radiation patterns of bow-tie antenna on the xOz plane at 400 MHz
由图10可见,虽然测试结果天线的最大辐射方向偏离了法向方向约10°,天线的辐射方向图前后并不完全对称,这是由于馈电同轴线直接连接到天线,未作平衡馈电措施,两个天线臂上的电流不平衡造成的。由于天线方向图没有分裂出多个辐射峰值,且在180°方向上天线增益没有明显降低,因此不会对探地雷达的探测效果造成太大的影响。此外,天线前向和后向的辐射并不完全对称,前向辐射强度的测试结果与仿真结果一致,后向辐射强度的测试结果则略小于仿真结果。
3 系统测试
将设计的天线用于探地雷达系统进行探测性能的验证。该系统的发射机采用课题组自研的脉冲源,时域波形宽度约为4 ns,峰值约为100 V,频谱中心频率约为375 MHz,时域信号和频谱特征如图11所示。
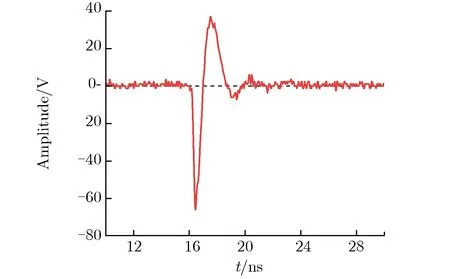
(a) Time domain
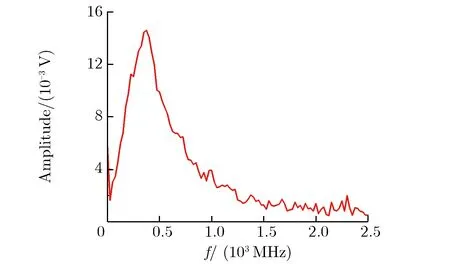
(b) Frequency domain图11 脉冲源的时域波形及频谱图Fig.11 Time domain waveform and spectrogramof the pulse source
采用课题组自研的接收机对地下目标的反射信号进行接收。系统测试的地点为西合铁路的东秦岭平导隧道附近。在这片区域中,选择了3个不同的目标进行探测,分别是平导隧道内的预先掩埋目标、高架桥和道路上的行车。这3个目标既包含对地和对空的探测,又包含了对静态目标和动态目标的探测。
3.1 平导隧道内预先掩埋目标
测试环境一如图12所示,探测目标为隧道内预先掩埋物体,这些物体的形状和厚度均不相同。

图12 测试环境一(探测目标为隧道内预先掩埋物体)Fig.12 Test environment I (Detection target isa pre-buried object in the tunnel)
图13为一个掩埋深度为50 cm,厚度为22 cm的长方体目标的探测结果(该结果采用了课题组自研的回波信号处理软件进行演示)。图13中,颜色最深的线为该目标物体的回波信号,出现在10 ns附近,由此可大致推算出,电磁波在隧道墙内传播的速度约为108m·s-1。出现在10 ns之前的信号为直达波信号,即发射天线发出的信号以表面波的形式传播,然后直接被接收天线所接收。此外,由于隧道中掩埋了许多其他物体,成分复杂,所以在探测结果中,目标物体的回波信号之后还会出现其他的干扰信号。
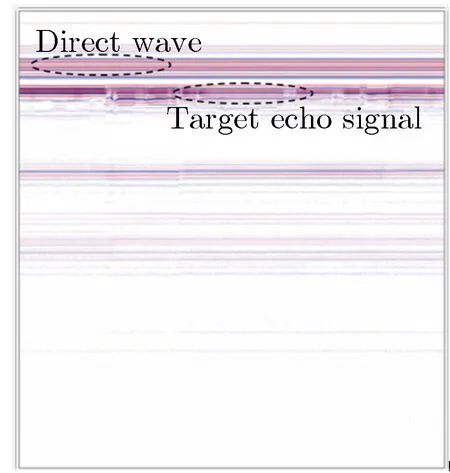
图13 隧道内预先掩埋物体的雷达探测结果Fig.13 Radar detection results of thepre-buried object in the tunnel
3.2 高架桥
测试环境二如图14所示,探测的目标为高架桥。选择这个测试环境主要为检验蝶形振子天线作为收发天线时,系统的最大探测距离及纵向分辨率。将系统连接完毕后,收发天线间隔一定距离放置在地面上,天线的正面对准路面上方的高架桥,高架桥的雷达探测结果如图15所示。
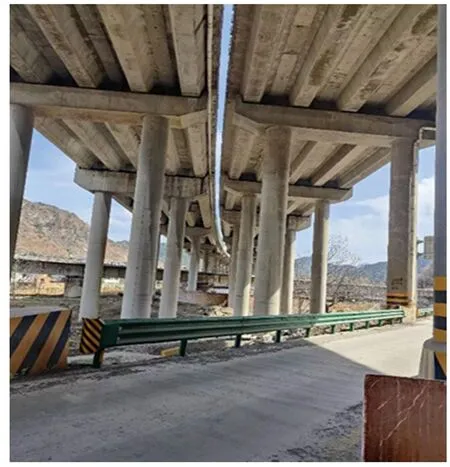
图14 测试环境二(探测目标为高架桥)Fig.14 Test environment Ⅱ (Detection target is viaduct)
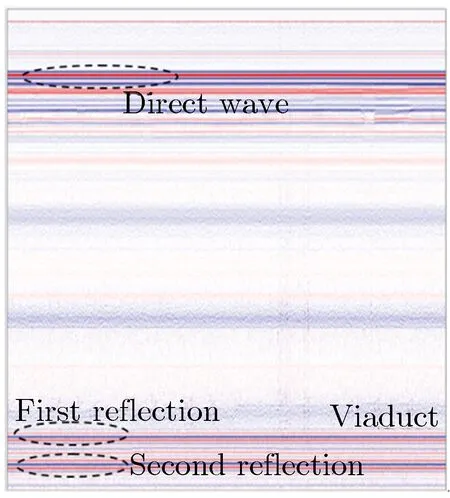
图15 高架桥的雷达探测结果Fig.15 Radar detection results of viaduct
由图15可见,高架桥的反射波信号第一次出现是在66 ns附近,对应3 × 108m·s-1的电磁波传播速度,可估算出高架桥的高度约为9.9 m。由于高架桥的底部构造是凹槽状,所以70 ns附近出现第二个回波信号,对应的高度约为10.5 m,这也说明系统纵向分辨率小于0.6 m。
3.3 道路上行车及道路旁石壁
测试环境三如图16所示,探测的目标为道路上的行车及道路旁的石壁。这个测试环境中,既存在动态目标,又存在静态目标。测试时,收发天线直立放置,最大辐射方向对准道路旁的石壁。道路上行车及道路旁石壁的雷达探测结果如图17所示。

图16 测试环境三(探测目标为道路上行车及道路旁石壁)Fig.16 Test environment Ⅲ (Detection target are moving vehicles and wall)
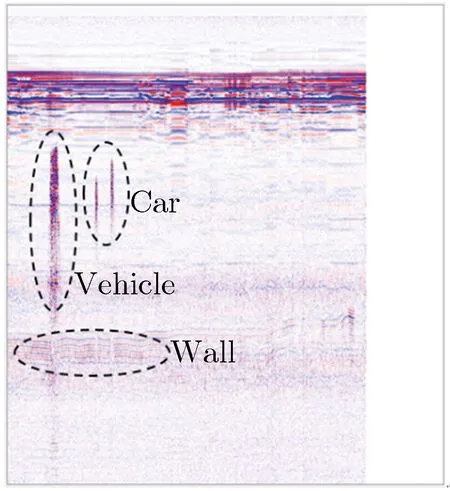
图17 道路上行车及道路旁石壁的雷达探测结果Fig.17 Radar detection results of moving vehicles and wall
由图17可见,该雷达系统对动态的车辆及静态的石壁均有良好的探测效果。在2维图像结果中,纵轴表距离,横轴表时间,当动态目标经过收发天线有效辐射区域的时间很短时,回波信号在横向上就几乎没有延伸,反而是在距离上有由远及近再由近及远的变化。因此,石壁对应的是图17中的横线,动态车辆对应的是图17中的3条竖线,其中,相对更长更明显的曲线是大卡车的回波信号,因其比小轿车具有更大的雷达散射截面,更易被探测到,所以信号纵向更长;而它的行进速度较慢,所以信号在横向上更粗。
从上述测试结果可知,该系统可在野外环境下保持稳定且良好的工作状态,适用于不同目标的探测,并有较高的分辨率。
4 结论
本文提出了一款蝶形振子天线,天线的整体尺寸为530 mm × 483 mm × 2 mm,工作频段为180 MHz~3 GHz,带宽内效率达到了80%以上。同时设计了与其配套的脉冲源及接收机,在外场环境下对不同目标进行了的整体测试。测试结果表明,该探地雷达系统探测距离大于10 m以上,纵向分辨率小于0.6 m,同时可实现动态目标检测及探测数据实时显示。该系统结构简单、成本低、探测能力强及分辨率高,同时具有检测浅层及远距离目标的能力。
