城市路段出入口上游客货混行路段强制换道模型研究
2023-10-20杨晓芳
杨晓芳,李 楠
(上海理工大学 管理学院,上海 200093)
0 引言
道路沿线两侧设置出入口的周围路段交通,因其交通状态复杂多变,运行不稳定等问题,对城市道路交通正常运行有一定影响。尤其是有货车出入的情况下,又因货车动力性能,制动性能相对较差,给本就不稳定的混行交通流带来更不利的影响。因此,针对有大型货车出入的城市道路路段的驾驶行为研究亟待进行。本文从货车换道的行为研究入手,以元胞自动机模型为基础,从货车换道特点入手,建立关于出入口周围路段货车换道行为的元胞自动机模型。
D.Chowhury、李杰等人[1-2]在NS 单车道元胞自动机基础上,提出对称双车道元胞自动机STCA 模型,引入了换道规则,使仿真效果与现实更接近。谢济铭、赵林涛[3-4]从车辆频繁换道对交通流影响入手,对车辆轨迹高精度提取,分析频繁换道对交通流和车辆行为特性影响,建立多车道元胞自动机模型。林才淦、李硕、李欣[5-7]研究行驶的前后车辆之间速度、距离存在差异,建立新的元胞自动机模型。王威、李娟、吉文超等人[8-10]综合考虑车辆特征、驾驶员特性、换道车辆前后车辆环境等多方面因素建立微观元胞自动机换道模型。前人在元胞自动机换道模型研究中,对不同类型车辆换道具有不同的特征缺乏详细的考虑。尤其是货车的换道研究较少,未详细考虑到货车的换道特点,例如换道时间长、制动距离长、且车身长度大,换道过程中相邻车道后方车辆的安全间距等问题。
因此,本文在前人研究不足的基础上,对货车换道与目标车道后方车辆安全间距的考虑,建立新的元胞自动机模型,对货车的换道驾驶行为分析,为出入口路段制定关于货车规划、设计及管理措施的制定提供依据。
1 模 型
根据车辆尺寸与性能不同,设定货车车身长度占据两个元胞;设定客车车身长度占据一个元胞。每个元胞长度设定为5.5m,两条一维元胞链由200 个元胞组成,模拟的实际道路路段长度L 为1.1km,边界条件为周期性边界。下述驾驶行为模型分为跟驰模型和换道模型。
1.1 跟驰模型与换道模型
1.1.1 跟驰模型
本文模型将路段拆分为200 个长度为5.5m 的元胞,假设元胞有2 个状态:0 和1,0 代表未被车辆占用,1 代表被车辆占用,每辆车车速为0,1,2,…,vmax,vmax为最大车速,从时间t→t+1 过程中,NS 跟驰模型按如下规则运行。主要变量定义:vi(t)表示第i 辆车在t 时刻的速度,xi(t)表示第i 辆车在元胞链上的位置,di(t)表示第i 辆车与前方车辆相隔的元胞数。速度vi(t)范围标定[0,vmax],di(t)=xi+1(t)-xi(t)。随机慢化概率引入p 表示。
跟车模型主要有四个步骤:加速、减速、随机慢化和位置更新[11]。
1.1.2 换道模型
经典的NS 元胞自动机单车道车辆跟驰模型在多车道交通流微观仿真模型中具有局限性,对超车、换道等驾驶行为无法进行模拟仿真,所以在此基础上引入换道规则。其中,双车道STCA 对称换道模型被许多学者所应用。其换道规则如下[11]:
式中:di(t) 表示t 时刻i 车与本车道前车元胞数;di-other表示i 车与目标车道前方车辆之间的元胞数;dsafe表示足够允许车辆变道的元胞数临界值。
1.2 货车换道演化规则细化
考虑到货车体积大,车身长特点,所以在元胞自动机模型中,设定货车车身长度占据两个元胞,根据货车换道特点,向右换道过程如图1 所示。
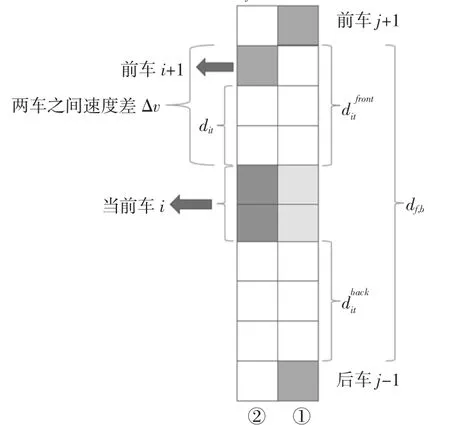
图1 货车换道过程示意图
由换道过程可知,货车向右换道至道路外侧车道进入出入口路段,要想实现这一过程,货车与正右、相邻车道前车和后车需满足相应的元胞数。
由以上分析可知货车换道需满足以下条件:
(1)本车i 与相邻车道正右平移元胞数:
(2)车辆行驶时前车与跟驰车之间行驶的距离一般大于最小安全间距l,因此本车i 与前车跟驰的实际距离用lr表示。则由假设本车与前车行驶的最小安全间距所需时间为t0可得出两者之间存在如下关系:
换道模型主要分成两类:强制换道模型和自由换道模型。本文着重分析货车强制换道模型。
货车实行强制换道模型:
相邻车道满足可插入间隙后,货车i 会不顾及相邻车道后车j-1 的行车状态,强行挤进目标车道。为安全起见,后车j-1会以最大的减速度保持与货车i 的安全间距。考虑货车与前方车辆因速度差形成的安全间距,安全间距与前方车辆速度有关联。因此具体的换道规则要对前方车辆类型分别展开讨论。
(1)若前方车辆是客车时,假设前方车辆是客车且vk>vh,又货车减速行车,则两车之间速度差不存在零的情况。本车i与正右相邻车道元胞数为dir=2,则两者之间的安全间距计算如下所示:
(2)若前方车辆是货车时,假设前方车辆是货车且前方货车速度vh1>vh2,又货车减速行车,则两车之间速度差不存在零的情况。则两者之间的安全间距计算如下所示:
换道动机和安全条件与前方车辆是客车时一致。
式中:t01,t02表示前车分别是客车和货车与货车两车之间保持最小安全间距所需时间;dit1,dit2表示前车分别为客车和货车与货车间隔的元胞;lrk,lrh表示前车分别为客车和货车与本车i 跟驰的实际距离;lk-h,lh-h表示前车分别为客车和货车与本车i 跟驰的最小安全距离;vback表示相邻车道后车速度;vk表示客车在t 时刻的速度;vh表示货车在t 时刻的速度。
在基础换道规则中,换道车辆与相邻车道后方车辆的安全间距dsafe一般设置是后方车辆的最大行驶速度vback,安全距离的设定一般是常值,但实际交通运行状态复杂多变,安全距离给定常值与实际交通运行较不符合。在本模型中考虑到换道车辆是货车,要结合货车实际运行情况考虑换道货车与后方车辆安全间距问题。
假设道路条件是城市道路双车道,货车在换道过程中,因车身长,速度低特点,换道时留给目标车道后方车辆的接收反应时间也相对较长,后方车辆意识到前车为货车时,会较早产生制动意识且保持适当的安全距离。城市道路路段长度设置有限,在接近交叉口或出入口时,走走停停,减速慢行现象是常态。如果前方是大型货车,出于安全心理,后方车辆会调整车速与之保持较大的安全间距,不存在紧密的跟车行为。基于以上分析,货车换道时,后方车辆根据车型的动力性能不同,安全间距可表示为:
式(23)表示在下一时刻时,相邻车道后车j-1 的最大可能速度减去本车货车i 的最大可能速度与安全间距阈值参数f(i)比大的关系式。
对城市道路交通流实际观测,如果前车是大型货车时,后方车辆跟车的安全间距会因车辆类型有所不同。后方车辆是小客车时,跟车间距较小,原因是货车体型大,对后方车辆存在视野盲区,小客车出于安全心理会本能的与货车保持一定的间距,又客车制动性能较好能在短时间内制动停车,所以小客车的安全间距阈值参数设定为一个元胞长度;后方车辆是货车时,货车车身高,视野区域大且制动性能较差,不能在短时间内制动停车,所以安全间距与小客车相比较大,因此安全间距阈值参数设定为两个元胞长度[12]。综合以上分析,安全间距阈值参数f(i)的函数形式为:
2 模型仿真
2.1 模型设定
道路状态设定为初始化,模拟车道条件为双车道,由两条被分割成200 个等份元胞的一维元胞链组成,元胞长度设5.5m,对应实际道路长度为1.1km,边界条件设定周期性边界,定义客车最大速度vmaxk=4cell/s,货车最大速度vmaxh=3cell/s。设定客车最大加速度αk=2;货车最大加速度αh=1。系统模拟初始时刻,随机慢化概率p=0.25,仿真步长设定0.1s。设置的换道概率pc=1。给定货车比例ph为0.1、0.2、0.3、0.4、0.5 五个混合比例。设定时间t01=4s,t02=6s。
本文采用MATLAB 软件建立模型进行仿真,根据上文提出的强制换道规则进行仿真研究分析,具体的模拟结果在下文中详细阐述。
2.2 强制换道对交通流影响分析
2.2.1 不同货车比例强制换道后时空图分析
不同的货车比例强制换道后对应的时空图如下:图2 当货车比例为0.1 时,少量货车和小汽车混合行驶,道路条件比较优越,交通状态运行平稳。从图中箭头处可看出,货车换道右侧车道后,时空图中货车行驶轨迹周围空白区域增多,即货车在强制换道后,为保障安全,客车与货车保持较大的安全间距。图3 至图6 分别对应货车比例为0.2,0.3,0.4 和0.5。从时空图中可以看出无论是原车道还是目标车道,随着货车比例的增大,越来越堵塞,这是因为当货车占比过高时,结合货车体积大,行驶速度慢,所需换道空间大等特点,道路满足货车行驶和换道的空间不足,因此堵塞逐渐明显。
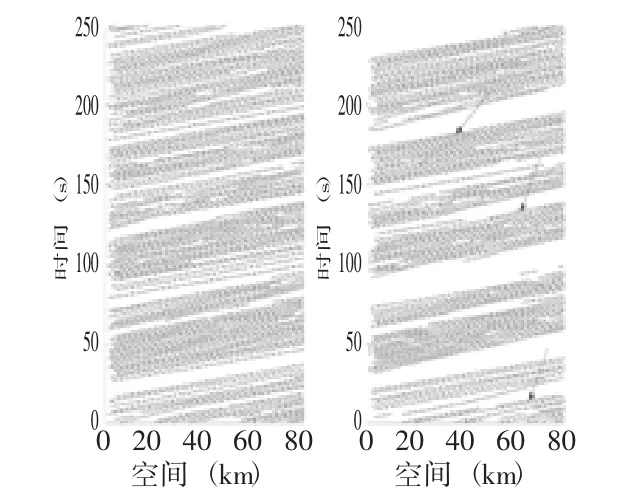
图2 货车比例0.1 强制换道时空图
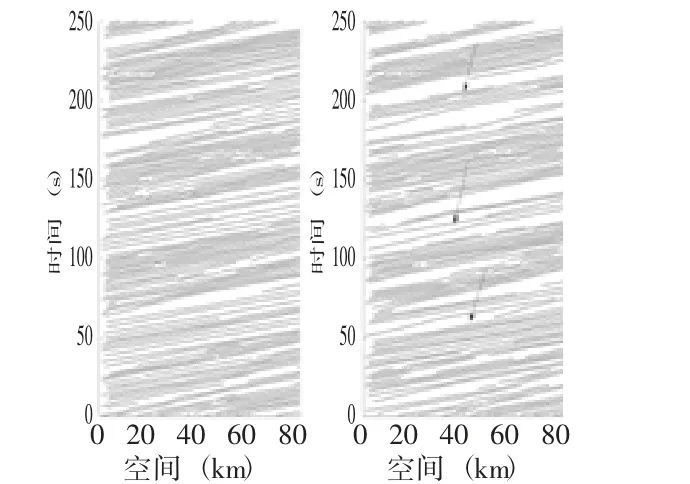
图3 货车比例0.2 强制换道时空图
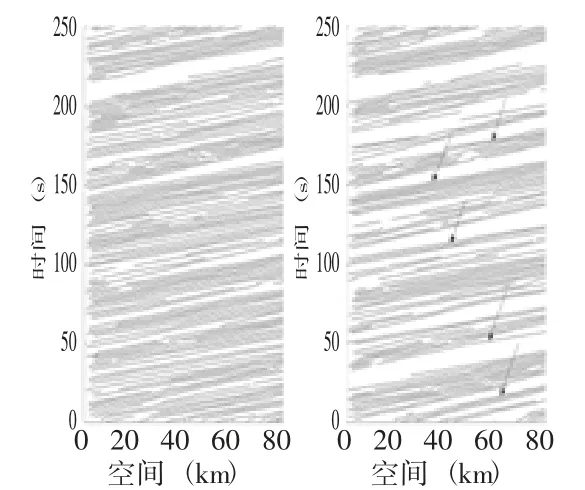
图4 货车比例0.3 强制换道时空图
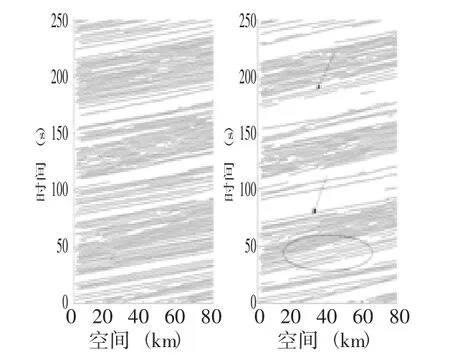
图5 货车比例0.4 强制换道时空图
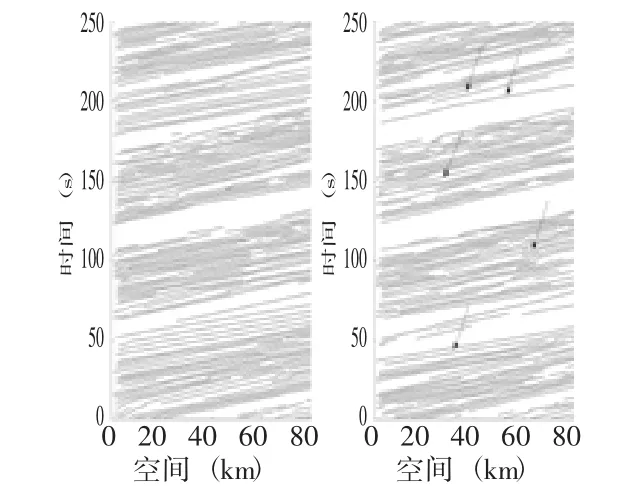
图6 货车比例0.5 强制换道时空图
2.2.2 在不同货车比例下,平均换道次数-密度关系
从图7 可以看到五种货车比例下,整体换道都呈现先增加后减少的趋势,比较符合模型设定,但换道次数峰值对应的密度在逐渐增大,出现此趋势原因随着货车数量的减少,客车数量增多,道路可行驶空间增多,提高了交通流的运行速度。从图中可以看到,当货车比例为0.5 时,交通密度为0.1 时,平均换道次数达到峰值;出现此现象从交通流密度与换道次数分析,是因为当交通密度处于低密度区时,道路行驶空间优越,货车为追求最大的行驶速度,换道次数急剧增加,随着密度的增加,又由于货车换道时所需安全间距较大,所以换道次数逐渐降低。
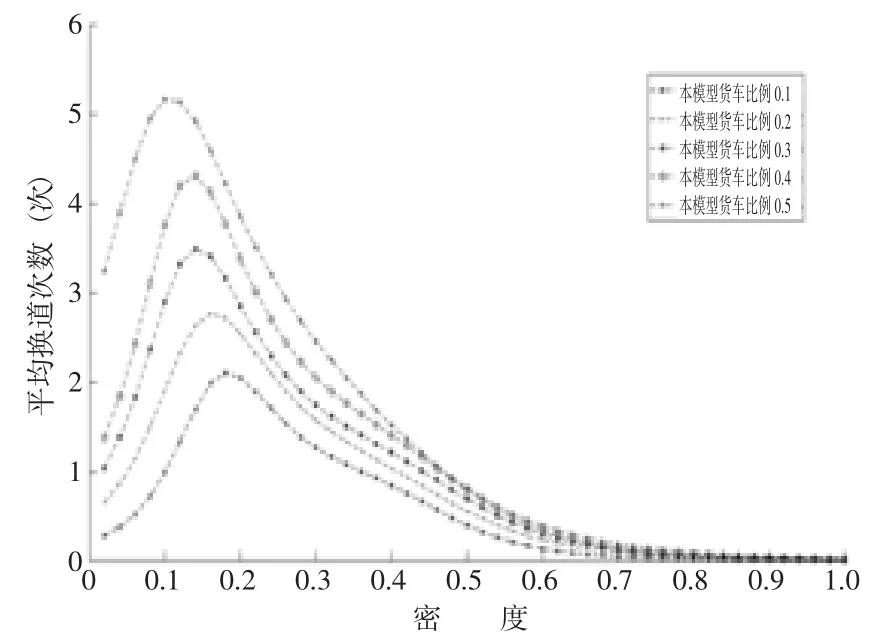
图7 平均换道次数与密度之间关系图
2.2.3 不同货车比例下,速度-密度之间关系
图8 反应的是五种不同货车比例在不同密度下的速度-密度基本图。从图中可以看出五种不同的货车比例的变化趋势都是随着密度的增大,速度在逐渐减慢,比较符合实际的交通运行状况。随着货车比例的不断增大,当道路密度最小时,五种不同的货车比例所对应的速度从图中可以看到:货车比例为0.1 时,速度最大,接着依次减慢,货车比例最大为0.5 时,速度最低。整体变化趋势符合实际交通。
2.2.4 本模型强制换道与基础换道模型对比
图9 为本模型强制换道和基础换道模型。货车比例大于等于0.4 时,基础换道模型整体的换道次数明显多于本模型换道次数,这是因为混合交通中,货车占比较大,占用较多的道路面积,又综合考虑目标车道后方车辆类型与换道货车的安全间距,考虑更多方面因素对货车强制换道安全间距的影响,本车道前方车辆类型对货车换道也有一定影响;货车比例0.3,本模型换道次数多于基础换道模型,混合交通流中货车占比较小,货车数量较少;货车小于0.3 时,可看出此时本模型的设定与基础换道模型换道次数差异性不明显。
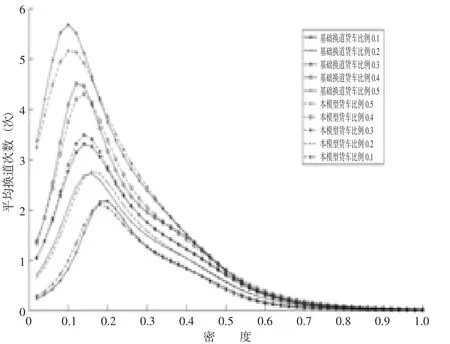
图9 本模型与基础换道模型对比关系图
3 结论
本文在传统小汽车换道的基础上,分析研究了货车在城市道路出入口上游路段强制换道的驾驶行为。结合货车的动力性能和车辆外型特点,建立出入口上游路段货车强制换道模型,重点从换道的安全距离角度进行分析探究,研究换道货车与后方车辆的安全距离,结合客货车不同的动力性能,对换道安全间距进行分类讨论。通过仿真模拟,获得五种货车比例时空图,速度-密度图和平均换道次数与密度之间的关系图与本模型和基础换道平均换道次数和密度之间的对比关系图。从时空图中可以看出两个车道的车辆运行情况,随着货车比例的增大,交通运行状态逐渐不稳定;速度-密度图变化趋势较符合实际交通运行;本模型和基础换道模型平均换道次数与密度之间的对比分析可以看出,货车比例大于0.3 时,两者模型平均换道次数具有明显差异性,基础换道次数远高于本模型。本文建立关于货车换道元胞自动机模型,考虑了货车的动力性能和车辆外型等特点,较贴合实际。
