天棚阻尼控制的快速原型验证
2023-10-19王圣坤
王圣坤,李 欣,巨 冶
天棚阻尼控制的快速原型验证
王圣坤1,2,李 欣1,2,巨 冶1,2
(1.中国汽车技术研究中心有限公司,天津 300300; 2.中汽研(天津)汽车工程研究院有限公司,天津 300300)
为提高车辆平顺性及驾乘体验,基于天棚阻尼控制策略,利用MATLAB/Simulink搭建了一套垂向减振器半主动悬架控制模型,并在扭曲路工况进行车辆动力学仿真分析,实现了该策略在软件层面的有效性验证;将上述模型进行通道匹配,并移植烧录至硬件dSPACE MicroAutoBox III中进行实车特征路的验证工作。主、客观相关数据表明,天棚阻尼控制下的半主动悬架,能使车辆主驾驶位座椅加速度均方根值明显减小,车辆的前后轴冲击、振动收敛、车身姿态等均有明显改善,验证了天棚阻尼控制策略在工程中的有效性。
天棚阻尼控制;车辆动力学仿真分析;平顺性;实车验证
汽车悬架的一个主要功能是为驾乘者提供良好的乘坐舒适性体验,有效地过滤来自于路面的振动[1-2]。悬架连接着车轮和车身,其设计影响到汽车的操纵稳定性及平顺性,而这两者是存在矛盾的,传统的解决方式是通过折中的形式兼顾二者,电控悬架的出现为该问题的解决提供了新思路[3-4]。
半主动悬架既保留了被动悬架结构简单、稳定性好的优点,性能又接近于主动悬架;同时,半主动悬架使用可调弹簧或可调阻尼而并非力作动器,能耗相比于主动悬架也很小[5]。与主动悬架相比,半主动悬架能够以较小的功率消耗实现与主动悬架相似的驾乘体验[6]。
半主动控制思想的基本原理为利用可调减振元件来取代被动悬架中的线性元件。控制器通过传感器采集振动信号,决策后对减振元件的参数进行调节,而阻尼器的阻尼系数为主要参数调节对象。半主动悬架实现了制造成本、设备复杂度、能耗以及悬架性能的最佳折中,因而,其具有广阔的发展空间,成为汽车行业的重点研究对象[7-8]。
KARNOPP等[9-10]最先提出天棚阻尼控制理论。天棚阻尼控制算法较于预瞄控制、线性二次高斯(Linear Quadratic Gaussian, LQG)控制、神经网络控制(Neural Network Control, NNC)、最优控制等具有算法简单,可靠性高,研究方案成熟等优点,目前被广泛运用于现代悬架控制系统方案。
文章以提高车辆乘坐舒适性为重点控制对象,以簧上速度及减振器速度作为悬架阻尼控制的判断依据,基于天棚控制策略进行了动力学仿真及快速原型的实车验证。
1 天棚控制策略动力学仿真分析
1.1 天棚控制原理
天棚阻尼控制的思想是在车体和假想的“天棚”之间安装一个阻尼器,该阻尼器对簧上质量产生与其运动速度相反的作用力,进而抑制簧上质量振动,实现减小振动的效果。二自由度四分之一悬架模型包含了车辆垂向的基本信息,其模型结构如图1所示。
根据牛顿第二定律,对上述悬架系统进行动力学分析:
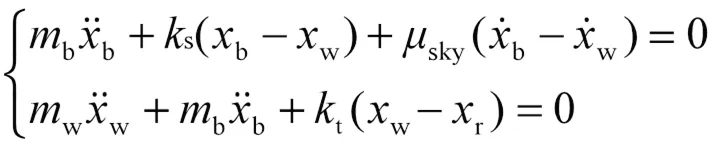
式中,b为簧上质量;w为簧下质量;b为簧上质量的垂向位移;w为簧下质量垂向位移;r为悬架刚度;为悬架阻尼系数;为悬架刚度;t为轮胎刚度。
图1 四分之一悬架模型
天棚阻尼控制力d计算如下:

由于实际车辆无法实施这样的理想力,应用时一般在系统中通过一个可控执行元件来模拟这个力。通过测量车身和悬架的相对运动速度,应用开关“on-off”半主动控制来实现。基于以上描述,阻尼系数sky计算如下:

式中,max和min分别为可调减振器可提供的最大和最小阻尼系数。
阻尼力:
=sat{d} (4)
式中,sat{·}是饱和函数,将阻尼特性限制在减振器的物理特性之内,即输出的力在减振器最小阻尼力和最大阻尼力之间。
1.2 动力学仿真分析
文章采用7自由度整车模型进行相关状态量的计算,如图2所示。假定车身为一刚体,四个车轮为质量点,悬架形式简化为4个独立悬架。7个自由度分别指的是车身的垂向位移、侧倾角、俯仰角和四个车轮的垂向位移。

图2 7自由度整车模型
簧上质量的垂向运动方程:



同时,

为分析天棚阻尼半主动控制算法的有效性,本文将传统减振器作为对比对象,以簧上加速度值的加速度均方根值为指标进行对比分析。加速度(均方根值)越小,表明车辆的乘坐舒适性越好。在动力学仿真中,以配备可变阻尼减振器(Continuous Damping Control, CDC)的某量产车模型(CarSim模型)作为被控对象,在MATLAB/ Simulink中搭建天棚控制策略对该车辆模型进行控制,仿真过程中车辆参数设置如表1所示。
表1 车辆参数
参数名称符号数值 簧上质量/kgMs2 100 侧倾转动惯量/(kg·m2)Ix700 俯仰转动惯量/(kg·m2)Iy3 200 质心至前轴距离/mL11.303 质心至后轴距离/mL21.442 质心高度/mh0.65 仿真频率/Hzfreq1 000
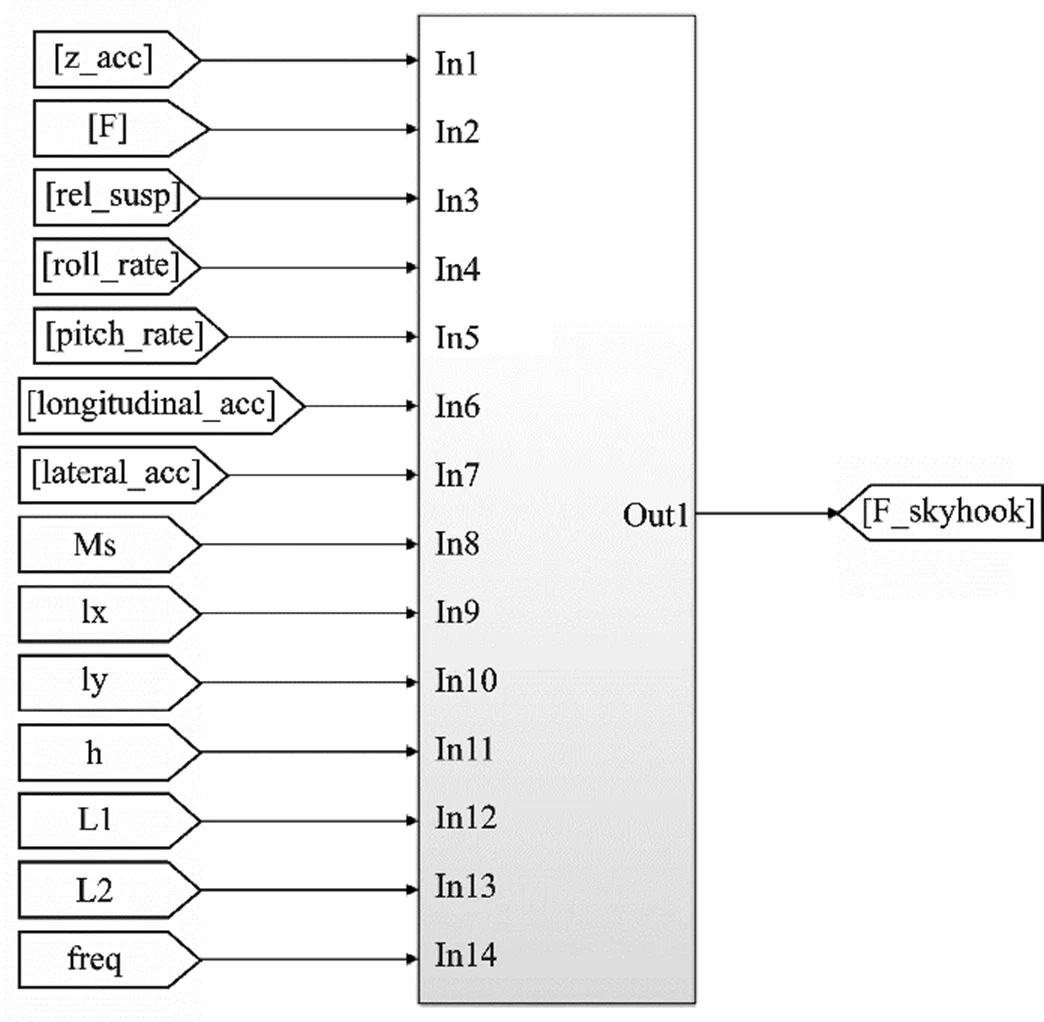
基于以上设置,进行动力学的联合仿真,搭建相关验证模型如图3所示。通过参数的输入,根据天棚控制策略计算出所需要的理想阻尼力,作为CarSim车辆模型的输入,将车辆的响应作为天棚策略的实时输入,形成闭环控制。
在仿真过程中,车速为定速18 km/h,制动关闭,设置仿真工况为扭曲路,高76 mm,纵向特征长2 m,其示意如图4所示。
对比被动减振器与天棚策略控制下的质心垂向加速度,仿真结果如图5所示。结果表明,相较于被动减振器,半主动悬架的控制策略对于车辆质心加速度有明显的降低,一定程度上提高了车辆行驶过程中的平顺性。

图5 质心垂向加速度对比
2 快速原型系统搭建
2.1 可控减振器快速原型系统搭建
在开发初期阶段,快速地建立控制器模型,并对整个控制系统进行多次的、离线的以及在线的试验来验证控制系统软硬件方案的可行性,该过程称之为快速控制原型(Rapid Control Proto- type, RCP)。简而言之,RCP就是将控制系统设计软件(如MATLAB/Simulink)开发的控制算法在一个实时的硬件上实现。
MicroAutoBox III是一款可用于快速实现车载功能原型开发的实时系统。为验证天棚阻尼控制系统的有效性,基于MicroAutoBox III在实车环境下搭建了可控减振器硬件的验证系统。通过标定将车辆减振器相对位移的电压信号转换为物理值,车辆的状态信息通过惯性测量单元(Inertial Measurement Unit, IMU)以控制器局域网络(Controller Area Network, CAN)总线的形式进行数据传输,脉冲宽度调制(Pulse Width Modulation, PWM)信号作为可控减振器的控制信号。在Simulink模型中进行模拟通道、CAN通道及数字通道的分配,并与ConfigurationDesk建立映射关系;利用ConfigurationDesk将程序进行编译,利用ControlDesk完成程序下载烧录、观测及采集工作。此外,在车辆系统中增加了加速度传感器、电流传感器等作为观测信号来源,便于程序的调试及迭代工作。
传感器的实际信号作为控制器的实时输入,电磁阀的占空比为控制信号的输出。CDC减振器的电磁阀开度由电流的大小决定,因此需要将MicroAutoBox III输出的PWM信号输出转换为电流。这里采用的RapidPro(M-Stack)设备将MicroAutoBox的占空比转换为电流,驱动负载,实现阻尼控制。基于以上工作,完成了可控减振器快速原型系统搭建,如图6所示。

图6 快速原型系统
2.2 快速原型算法移植
在实际工程应用过程中,CDC减振器控制系统的实现过程如图7所示。在路面的激励下,车辆模型的系统状态变量将发生相应的改变,将状态变量及相关的传感器信号作为天棚控制策略的输入;控制策略根据系统状态变量计算得到当前时刻减振器所需要的理想阻尼力,并经过阻尼力的边界约束计算得出CDC减振器硬件的实际可输出控制力;利用实际可输出控制力及CDC 逆向模型计算得出当前时刻所需要的电流,进而驱动减振器电磁阀,实现变阻尼控制。

图7 CDC 减振器控制工程实现
调整模型并进行控制器物理通道匹配,更新后的模型如图8所示。
编译完成后,通过ControlDesk将该策略烧录下载至MicroAutoBox III中,在ControlDesk进行算法标定及数据采集相关工作。
3 结果分析
本次实车测试工况包括:1)匀速40 km/h通过沥青冻胀变形路;2)匀速90 km/h通过正弦波路。评价形式包括:以主驾驶位座椅滑轨处加速度均方根值作为客观的评价依据;以主观评价人员的评分作为车辆的主观评价依据。
3.1 客观评价
通过加速度传感器及数据采集设备,分别采集车辆处于被动减振器以及天棚策略控制的CDC减振器状态下主驾驶位座椅处的加速度值,其对比结果如图9、图10所示。

图9 正弦波路

图10 沥青冻胀变形路
计算出的加速度均方根值如表2所示。
表2 加速度均方根值
特征路CDC减振器(天棚控制)被动减振器 正弦波路(90 km/h)0.142 70.152 1 沥青冻胀变形路(40 km/h)0.094 90.101 9
客观数据表明,天棚控制对于舒适性有所提升,降低了在沥青冻胀变形路和正弦波路上簧上质量的振动。
3.2 主观评价
主观评价采用十分制的形式进行评定,驾乘后主观评价分值如表3所示。
表3 主观评价分值表
沥青冻胀变形正弦波路 前轴冲击前轴收敛后轴冲击后轴收敛车身姿态车身控制贴地感 天棚控制7.007.006.006.006.006.507.00 被动减振器5.506.506.006.004.505.505.00
为直观体现,建立上述数据雷达图,如图11所示。
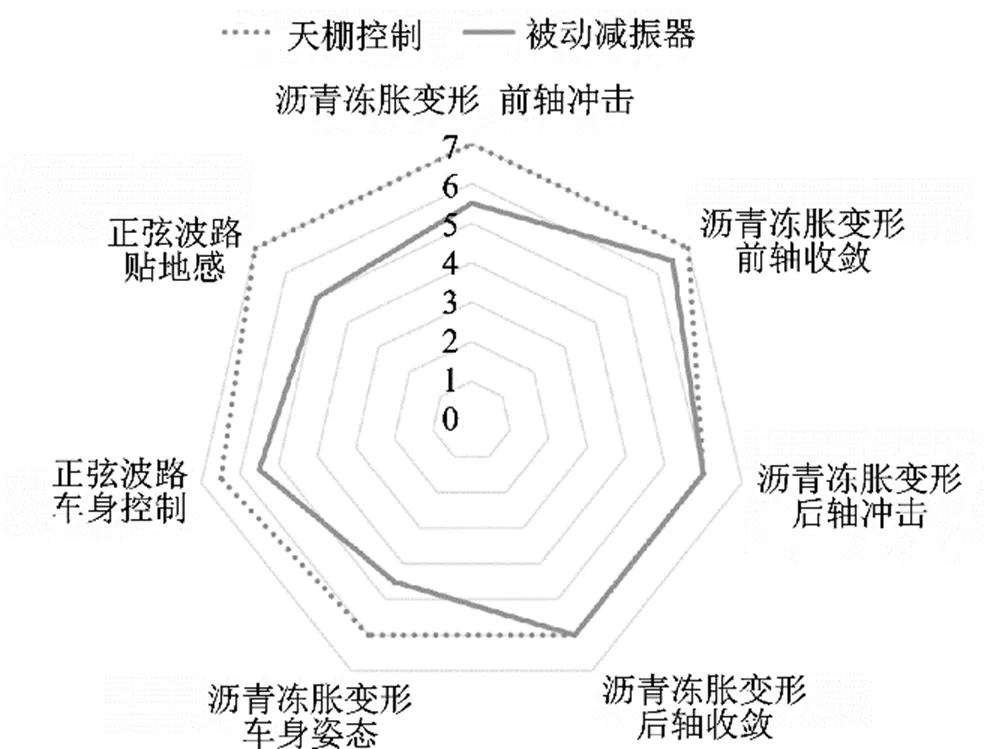
图11 雷达图
主观评价表明,天棚控制策略下的半主动悬架在正弦波路及沥青冻胀变形路上的车辆表现均有所改善。
4 结束语
本文针对天棚控制提出快速原型的实施方案,验证了天棚控制策略的半主动悬架控制效果。
1)实现快速原型的实车验证;2)较被动减振器,座椅加速度均方根值显著减小,一定程度上提高了车辆的驾乘舒适性;3)主观角度车辆性能较于被动减振器有一定的提升;4)实现了天棚阻尼控制策略在车辆上的工程化应用。
[1] 《中国公路学报》编辑部.中国汽车工程学术研究综述2017[J].中国公路学报,2017,30(6):1-197.
[2] 陈仲生,曹军义,秦朝烨,等.汽车悬架同步振动抑制与能量收集综述与展望[J].机械工程学报,2022,58 (20):3-26.
[3] 姚嘉伶,蔡伟义,陈宁.汽车半主动悬架系统发展状况[J].汽车工程,2006(3):276-280.
[4] 袁海英,高远,王雨涛,等.车辆主动悬架系统的舒适性优化控制[J].计算机仿真,2018,35(1):141-146.
[5] 陈龙,马瑞,王寿静,等.车辆半主动悬架阻尼多模式切换控制研究[J].振动与冲击,2020,39(13):148-155.
[6] AMA S,MMS K.Semi-active Suspension Systems fromResearch to Mass-market-a Review[J].Journal of Low Frequency Noise, Vibration and Active Control,2019, 40(2):1005-1023.
[7] 张晓娟.试论汽车半主动悬架控制策略研究:评《汽车悬架系统新技术》[J].机械设计,2020,37(9):151.
[8] HUDYJAWA S,NAZIM M,HAZRAT A.Design and Development of a Semi-active Suspension System for a Quarter Car Model Using PI Controller[J].Journal of Automation, Mobile Robotics & Intelligent System, 2017,11(4):26-33.
[9] KARNOPP D,TRIKHA A.Comparative Study of Opti- mization Techniques for Shock and Vibration Isolation [J].Journal of Engineering for Industry,1969,91(4): 1128-1132.
[10] KARNOPP D,CROSBY M.The Active Damper a New Concept for Shock and Vibration Control[J].Shock and Vibration Bulletin,1973,143(2):119-133.
Rapid Prototype Verification of Skyhook Damping Control
WANG Shengkun1,2, LI Xin1,2, JU Ye1,2
( 1.China Automotive Technology & Research Center Company Limited, Tianjin 300300, China; 2.CATARC (Tianjin) Automotive Engineering Research Institute Company Limited, Tianjin 300300, China )
In order to improve the ride and driving experience of the vehicle, based on the skyhook damping control strategy, a set of semi-active suspension control model of vertical damper is built using MATLAB/Simulink, and the vehicle dynamics simulation analysis is carried out under the twisted road conditions, and the effectiveness of the strategy is verified at the software level.The above model is matched with the channel, and transplanted and burned to the hardware dSPACE MicroAutoBox III for the verification of the real vehicle characteristic path. The subjective and objective data show that the root mean square value of the acceleration of the seat in the driver's seat of the vehicle under the control of the canopy damping is significantly reduced, and the front and rear axle impact, vibration convergence, body attitude, etc. of the vehicle are significantly improved, which verifies the effectiveness of the skyhook damping control strategy in the project.
Skyhook damping control; Vehicle dynamics simulation analysis; Ride; Real vehicle verification
U462
A
1671-7988(2023)19-81-06
10.16638/j.cnki.1671-7988.2023.019.016
王圣坤(1996-),男,硕士,研究方向为半主动悬架控制,E-mail:wangshengkun@catarc.ac.cn。