小麦播种机电气控制系统的设计与试验
2023-10-17崔霞
崔 霞
(唐山劳动技师学院,河北 唐山 063000)
0 引言
播种环节是决定农作物质量和产量的重要因素,尤其是小麦作物的播种。传统的小麦播种机多以外槽轮式排种器为主,采用地轮和侧边箱式驱动模式[1],当播种机的行进速度发生改变时,排种轴转速随之改变,从而使排种器中的种子数量也发生改变,属于机械式控制[2]。然而,该播种方式常常因为拖拉机速度不一致、地轮打滑等原因产生小麦播量无法控制及播种不均匀等现象,严重影响了小麦最终的产量和质量,已不适用于当下农业发展需求。
为了解决上述问题,笔者借助智慧农业的相关理念,设计了一种以PLC为核心的小麦播种机智能电气控制系统[3]。系统通过建立播种机前进速度与拖拉机速度、步进电机转速的随动模型,实现了小麦播量的控制,为小麦的高产打下基础。
1 总体设计方案
现阶段小麦播种作业使用频率最高的是外槽轮式播种机,作业时由地轮或侧边箱驱动播种机前进[4],播种机在前进的过程中带动排种轴转动,从而使外槽轮旋转,种子在自身重力的影响下充满排种槽,并随之旋转;依据旋转速度的大小,外层种子受到槽轮外圆的拨动力,落入输种管;此时,输种管的种子数量即1个穴的播量,最后经过开沟器落在地沟中。因此,若要控制种子的播量,关键是控制排种器的转速[5]。
为了使播种机根据其前进速度的大小自动调整排种轴的转速,设计的小麦播种机电气控制系统由以PLC控制为核心的电气控制代替了原有的依靠地轮和侧边箱式机械驱动模式[6],改变了传统的播种机的传动装置。主要设计思路是:在播种作业前,通过人机交互界面设置作业参数,包括亩播量和前进速度等;在播种作业的过程中,通过安装在拖拉机主动轮的内侧的速度传感器采集拖拉机速度信息[7],并发送给PLC进行模型换算处理,再输出控制指令发送给步进电机;步进电机调整其转速,从而改变排种轴转速,以此来达到调整播量的目的。整体架构如图1所示。
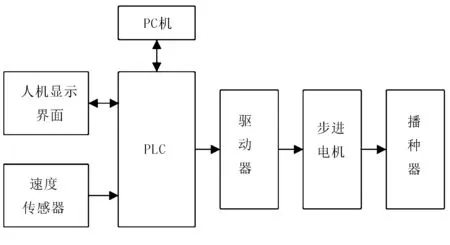
图1 总体架构Fig.1 Overall structure
2 硬件设计
根据总体设计架构,控制系统的硬件部分包括PLC主处理器、人机交互界面、速度传感器、驱动器、步进电机及播种器等。
1)PLC是可编程逻辑控制器的简称[8],是一种专门服务于工业的计算机控制系统,具有可靠性高、组态灵活等特点。其基本结构包括电源、中央处理器、存储器、输入单元及输出单元等。其中,电源主要将交流电转换为直流电,为PLC内部供电,一般为24VDC[9];中央处理器是PLC的“大脑”,由寄存器、控制器及运算器组成。上述电路都集中在1块芯片上,通过地址总线、控制总线与存储器的输入/输出接口电路相连。该模块主要进行逻辑和数学运算,实现用户程序对系统赋予的功能;存储器主要用来存储用户程序、逻辑变量等信息;输入单元是PLC与外部设备的接口,主要用于接收外部采集的数据[10];输出单元是PLC与被控设备的接口,主要用于向被控设备发送控制指令。其工作原理如图2所示。
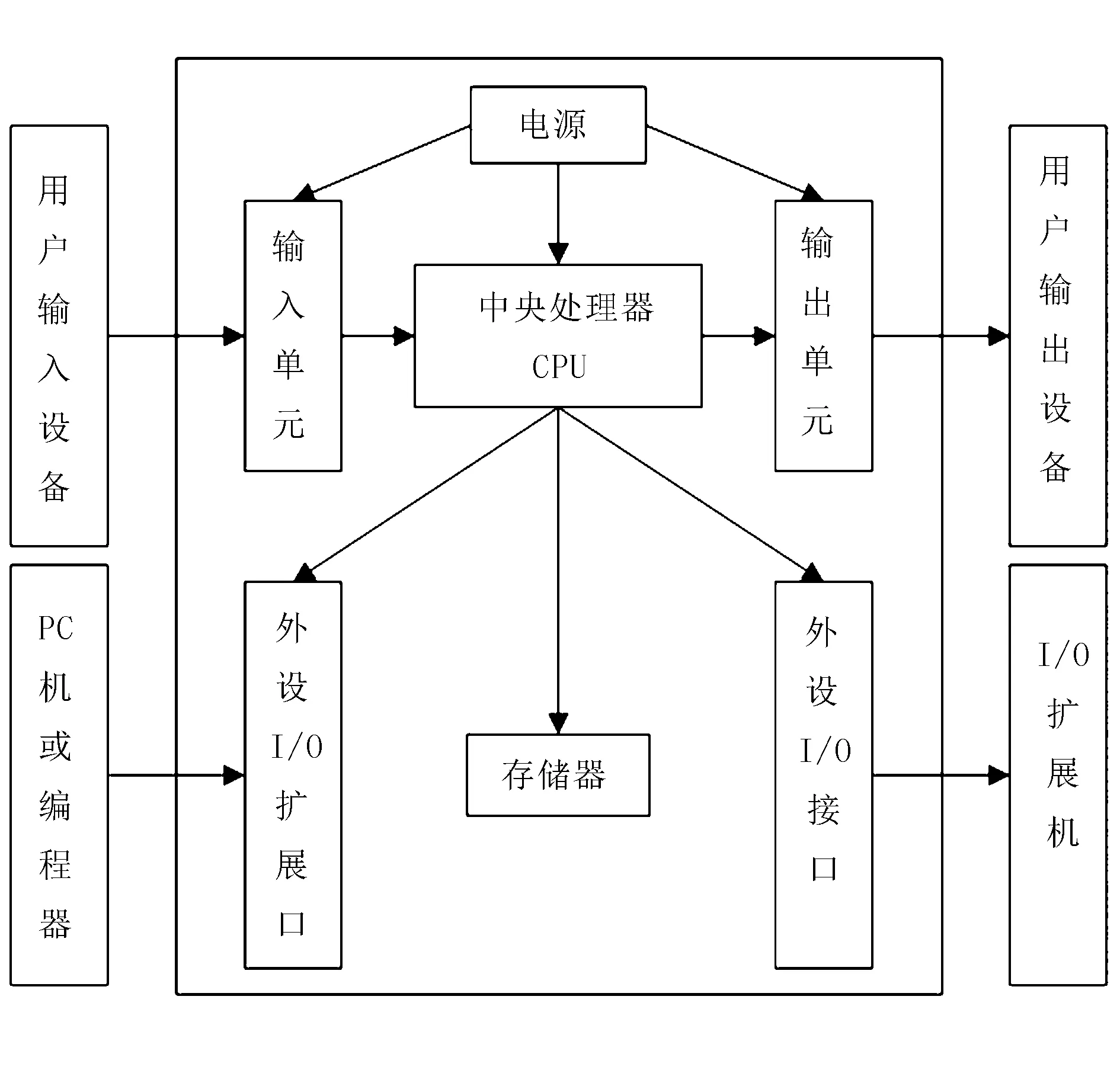
图2 PLC组成结构Fig.2 PLC structure
PLC种类多种多样,本次选取的PLC一方面能够处理数据,另一方面能够显示相关参数,故选用文本一体机,其内部的电路相对较为复杂,分为输入电路和输出电路。
在输入电路中,PLC自带的24VDC可以检测传感器信号,使用者只需连接相关的传感器节点即可。另外,考虑到系统在田间作业的时间较长,故播种机自带的电源不能满足供电时间的需求,故在输入电路中加入24V直流电[11]。当输入信号促使开关闭合时,电路中通过的电流激励了光电耦合器,三极管的状态由截止变为导通,故相应的外部采集信号被送到PLC中。其电路原理图如图3所示。
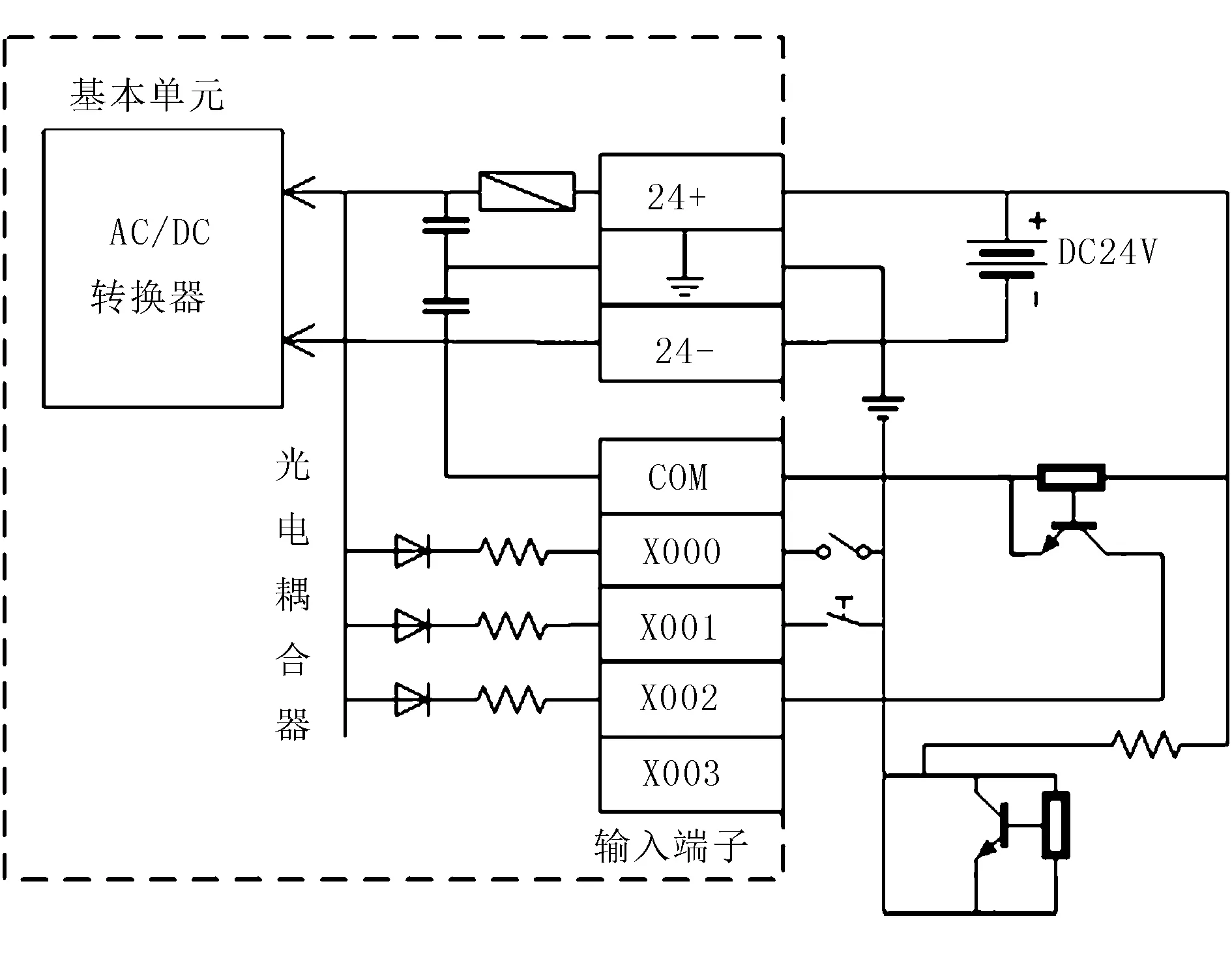
图3 PLC输入电路原理图Fig.3 Schematic diagram of PLC input circuit
在输出电路中,利用晶体管输出方式,只能用24VDC作为负载电路,输出端子分为3组,不同组的输出节点可以接入不同的电源回路。当PLC处理之后输出信号时,输出指示灯被点亮,接通晶体管,负载电路工作。其电路原理图如图4所示。
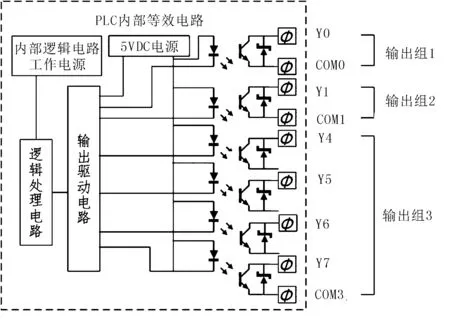
图4 PLC输出电路原理图Fig.4 Schematic diagram of PLC output circuit
2)人机交互界面分为设置和查看两种界面:设置界面用于作业人员设置小麦播种作业的相关参数,如播种机前进速度、播量等;查看界面主要用于实时查看现有播种机的前进速度、播量等信息。在本设计中的人机交互界面是PLC自带的显示器。
3)速度传感器是安装于拖拉机主动轮内侧的采集装置,需要实时地采集拖拉机的速度信息发送给PLC。由于PLC只能接收数字信号,故在设计中选用开关型霍尔传感器来采集速度数据。该类型传感器内部包含电压调整器、差分放大器、霍尔电压发生器等组成的磁敏电路,在工作过程中其自身的磁场遇到磁敏物质时,使内部的电路指示灯亮度发生变化,经过内部的磁敏电路转换为电压信号输出。其工作电压为5~24VDC,输出电流为200mA,检测距离为10mm,开关频率为320kHz,可满足田间作业的抗振动、抗干扰、高灵敏度的需求。
4)步进电机主要是提供动力给排种轴,根据播种机的行业标准,选取的步进电机的信号为110BYGH1465型两相混合式步进电机[12]。其步距角为1.8°,机身长150mm,工作电压为5.2V,静力矩为21N·m,定位力矩为5.9N·m,转动惯量为10900g·cm2,质量为8.4kg,并采用四线双极接线法,具有平稳的力矩输出,适合田间播种作业。
5)驱动器是为步进电机服务的,它接收PLC控制器发出脉冲信号,将其进行放大、过滤等处理后,发送给步进电机,使步进电机绕组通电,以此来控制步进电机。为了与110BYGH1465型步进电机匹配,选用DQ2722M型驱动器。该驱动器工作电压为110~220VAC,外径为86~130mm,最高精度为40000脉冲/r[13]。
3 软件实现
设计的软件主要以GX-Developer实现[14]。PLC电气控制系统的程序分为主程序、速度测试程序及驱动程序3大部分[15]。图5为主程序实现流程,定义周期T=1s。
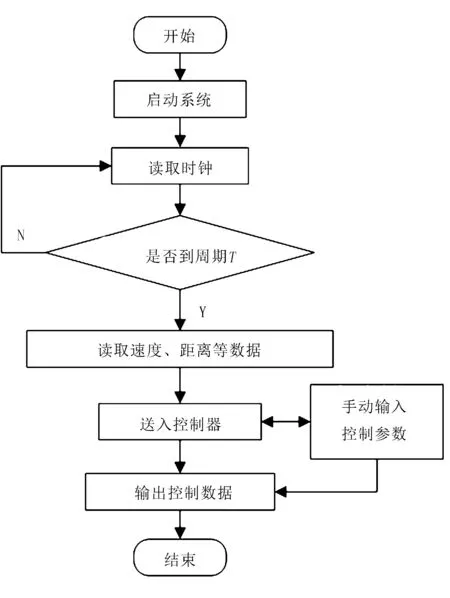
图5 主程序流程图Fig.5 Main program flow chart
对于速度测试部分,先要定义相关的开关量,再设定采样周期为10s,最后对接收的速度信号进行计算,得到速度值和距离。其实现流程如图6所示。
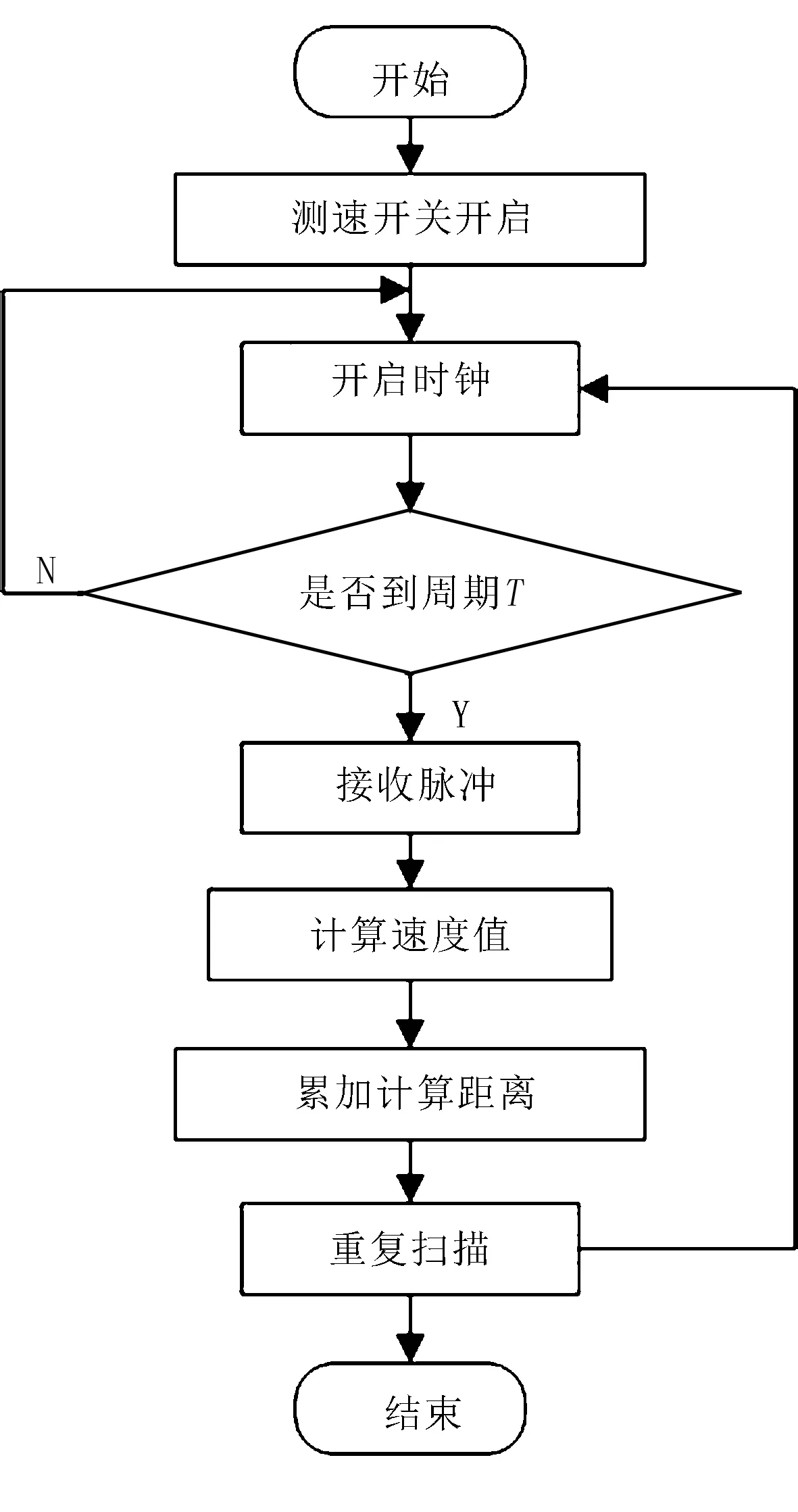
图6 速度测试流程图Fig.6 Flow chart of speed test
驱动部分的关键是建立拖拉机前进速度、步进电机转速与播量之间的随动模型。步进电机是驱动排种轴的动力,步进电机的转速即为排种轴的转速,故单位时间内步进电机转速越快,排种轴的转速就越快,排种器转的圈数也就越多,播量也就越大。具体的实现流程如图7所示。
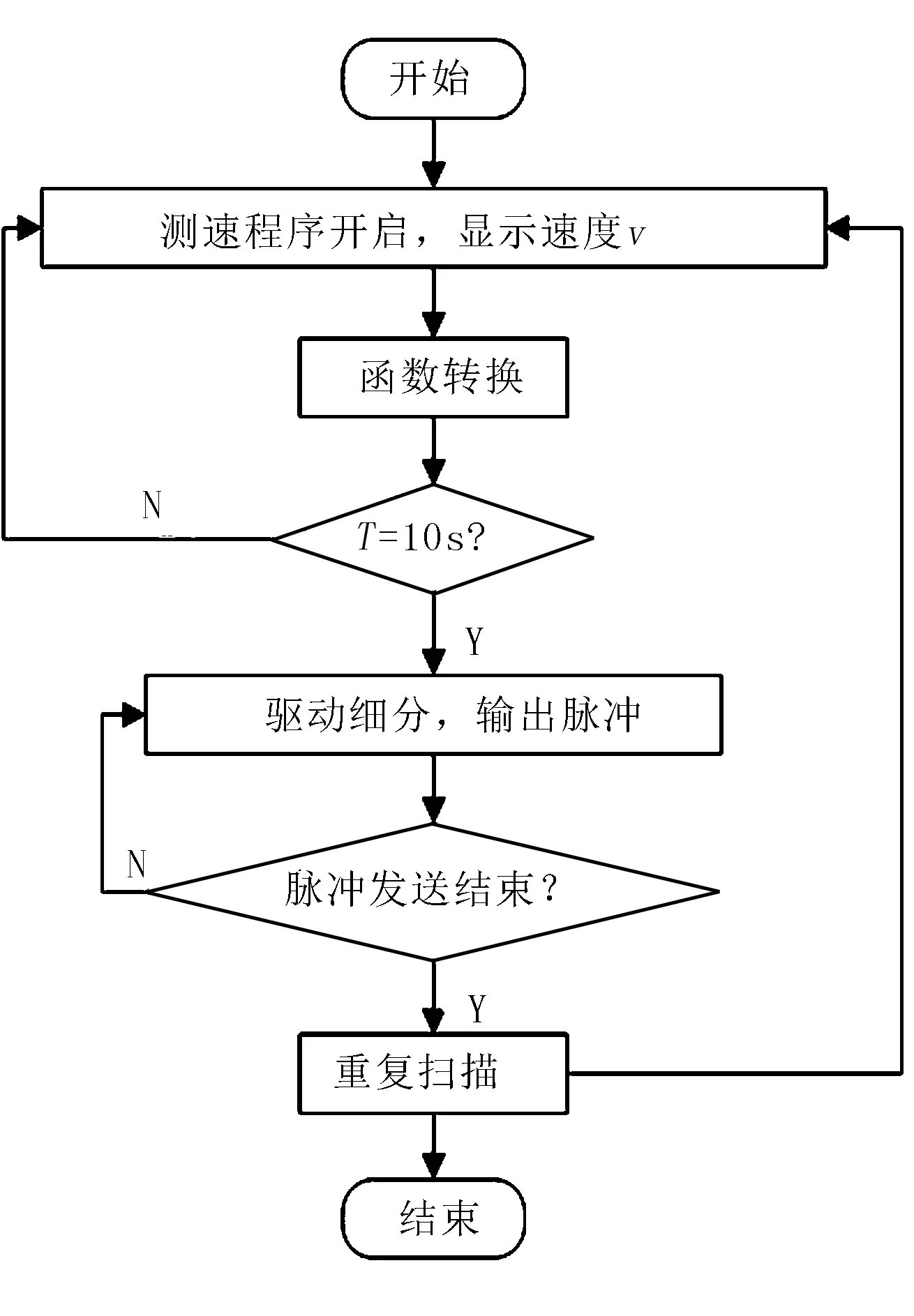
图7 驱动部分流程图Fig.7 Flow chart of driving part
4 试验测试
为了验证系统的实际使用性能,试验中定义田间标准的目标亩播量Q=9.59kg,误差在5%之内视为精播,播种长度为100m,分别设置拖拉机的前进速度为2.0、4.0、6.0km/h。试验过程中,分别对排种器的排种量进行统计,播种机作业性能试验数据如表1所示。由表1可以看出:系统的播量误差在5%以内,满足精播的要求。
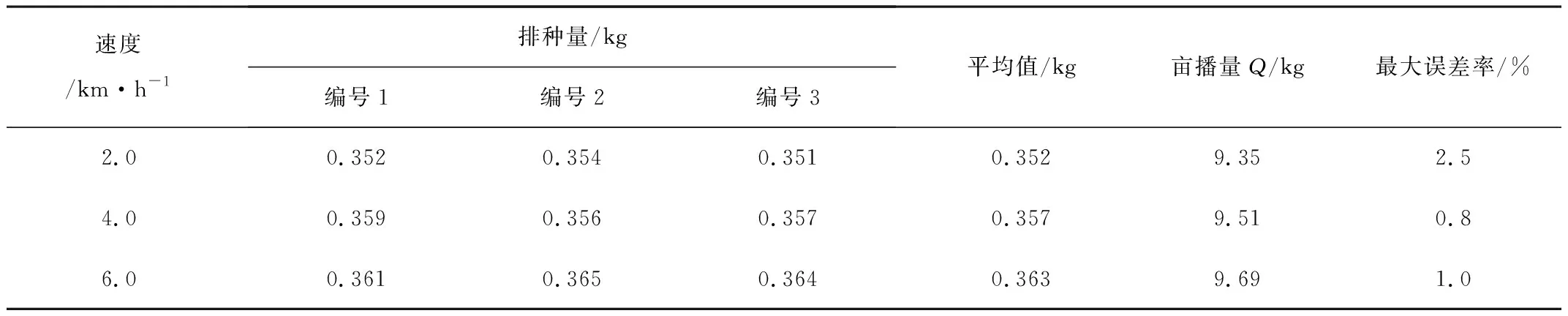
表1 播种机播量性能试验数据Table 1 Experimental data of seeding rate performance of seeder
在精播过程中,除了对播量有要求之外,还需重视播种的均匀性。借助上述试验过程,选取播种机速度为4.0km/h的试验数据,任取1m,每隔10cm统计种子数量数据如表2所示。

表2 播种机均匀性性能试验数据Table 2 Test data of uniformity performance of planter
农业部《精量半精量机械化播种实施技术要点》中规定:按10cm分段时,播种均匀性系数需小于等于40%。其中,播种均匀性系数等于标准偏差/平均值×100%。由表2数据可计算出:对应试验编号顺序的播种均匀性系数分别为27.30%、38.30%、35.40%,均在规定指标以内,满足精播的要求。
5 结论
利用步进电机代替传统的播种机传动装置,设计了一种基于PLC控制的农用播种机电气控制系统。以PLC为核心处理器,通过采集播种机前进速度为输入量,经过对应模型处理后,输出电机转速控制命令,对播种的种子数量及均匀性进行调节。试验结果表明:系统能够满足小麦精密播种的要求,提高了播种作业质量,可为自动化精密播种的推广提供参考。
