丘陵山区多功能移栽施肥农作小车设计与试验
2023-10-17任金波陈思怡池哲温郑书河
任金波,陈思怡,林 昕,池哲温,林 婷,郑书河
(福建农林大学 机电工程学院,福州 350002)
0 引言
南方丘陵山区幅员辽阔,地形多种多样,是我国重要的粮食、蔬菜瓜果、青饲料等农作物生产基地,在我国农业生产中占有重要的地位[1]。然而,丘陵山区的农机化发展缓慢,丘陵地带应用的多为功能单一、通用性差的农机装备,特别是蔬菜生产的机械化水平远低于大宗粮食作物,影响着蔬菜的种植效率和质量,严重制约了蔬菜产业的发展[2]。目前,国内外众多学者已针对大田块的蔬菜类移栽种植机器开展了大量研究。胡建平等人通过可编程控制器PLC设计的控制系统,可提高自动移栽机取苗的控制精度和协调配合程度,并实现了整排取苗和间隔投苗的种植功能[3]。张开兴等人针对番茄半自动移栽机效率低、伤苗漏苗、人工成本高昂等问题,设计出弹性指针夹紧式取苗机构[4]。田素博等人针对当前人工喂苗工作效率低、漏苗率高等问题设计的蔬菜移栽机自动喂苗装置,具有体积小、安装方便等优点[5]。朱兴亮等设计了茄果钵苗自动移栽机,可满足新疆地区茄果类蔬菜钵苗的自动移栽需求,栽植合格率为97.50%[6]。石河子大学王宁等人设计了整排取投苗的控制系统,通过三点定位的取投控制方法,可控制步进电机和气缸协同工作[7]。南方丘陵地区地块小,坡道陡,设备体积过大和操作复杂的农机装备不适宜在该地区使用,而体积小且可同时完成移栽和定量施肥的农作小车装备较少,严重影响了蔬菜移栽和定量施肥环节的种植效率。针对此问题,本文设计了一种可满足大部丘陵地区种植需求的跨垄式移栽施肥农作小车,可保证在较小的装备结构体积和质量下,降低使用者操作难度,只需通过更换功能模块即可实现不同作物的移栽、施肥生产需求,从而提高机器的通用性和利用率。
1 结构设计方案
1.1 整体结构及工作原理
丘陵多功能移栽施肥农作小车由跨垄式行进底盘、可拆卸上层结构、避障与视觉系统组成,如图1所示。
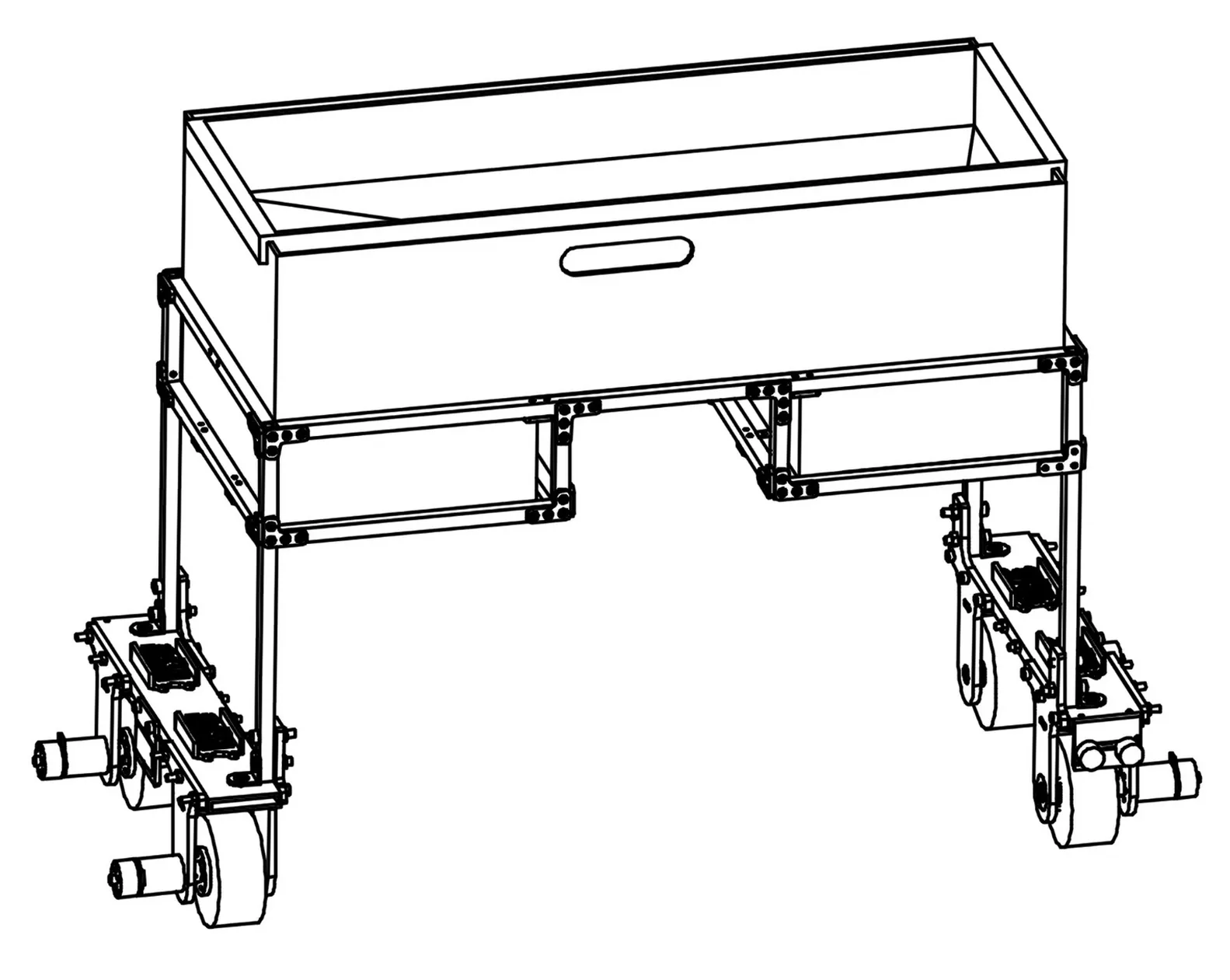
图1 丘陵多功能移栽施肥农作小车整机结构Fig.1 Structure of multifunctional transplanting and fertilizing farm trolley on hills
农耕作业前,使用者根据不同农作要求更换所需模块,在控制面板选择当前种植的蔬菜株距,装填耕作所用的材料;将多功能移栽施肥农作小车放置在田地里的恰当位置,启动小车。工作时,小车以设定的速度横跨田垄前进,通过超声波和红模块来实现田垄自动循迹功能;当小车运行到既定耕种位置时,小车停止并实现当前植株的农作任务。当选择移栽模块时,单片机发送指令控制舵机旋转,利用螺旋式的结构将苗种推到出苗口,苗种通过下方辅助装置完成当次补苗任务;当选择施肥模块时,通过OpenMV机器视觉模块进行目标耕作位置的识别,判断识别到施肥对象后,发送指令控制舵机旋转带动施肥装置,定量施肥给蔬菜,完成当次施肥任务。完成当前农作任务后,控制系统发送信号使小车继续前进完成后续植株的农作任务。
1.2 跨垄式行进底盘设计
根据丘陵地区小田块的作业要求,设计了可在田地里稳定行使的跨垄式行进底盘。机架由宽度(mm)×高度(mm)×厚度(mm)分别为15×15×2和50×10×2的铝方管通过铆钉固定。底盘的中间部分离地间隙高度为250mm,车架总长为640mm,总宽为300mm,符合丘陵地区小田块种植模式与农艺要求。底盘轮组由4个M2006 P36直流无刷减速电机来驱动4个直径为75mm的麦克纳姆轮行走,左右轮距为400mm,前后轴距为200mm。小车无需进行转向即可实现前行、左右横移等动作,很好地适应丘陵地区不规则形状垄形状,大大缩短行进的时间,提高工作效率,如图2所示。
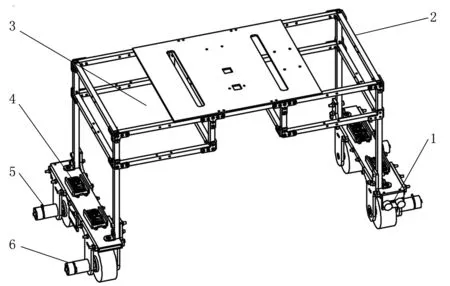
1.超声波模块 2 .底盘支架 3.电源模块放置仓 4.电调 5.轮组驱动电机 6. 麦克纳姆轮图2 跨垄式行进底盘示意图Fig.2 Schematic diagram of Cross Ridge traveling chassis
1.3 可拆卸上层结构
由于可适应丘陵地区的机器的底盘体积小,可同时装载的功能模块少,因此为丘陵多功能移栽施肥农作小车设计轻量化的“可拆卸上层结构”,分为移栽补苗模块、施肥模块和精确作业辅助装置。工作时,用户可以根据使用场景需求更换装载在底盘上的模块,整体机构拆装方便且总体积小。
1.3.1移栽补苗模块设计
目前,我国现有的移栽机械的设计方案很多,但通常借鉴发达国家的相关技术,标准化程度不足,机械化水平不高。小型移栽机械受限于机械本身体积大小,可采用的移栽装置设计较少,多采用圆盘式结构,容易出现卡苗、伤苗、漏苗等情况[8]。为了避免由于圆盘式结构旋转式对种苗的伤害,基于螺旋推进原理设计了“螺旋式推进机构”,如图3所示。
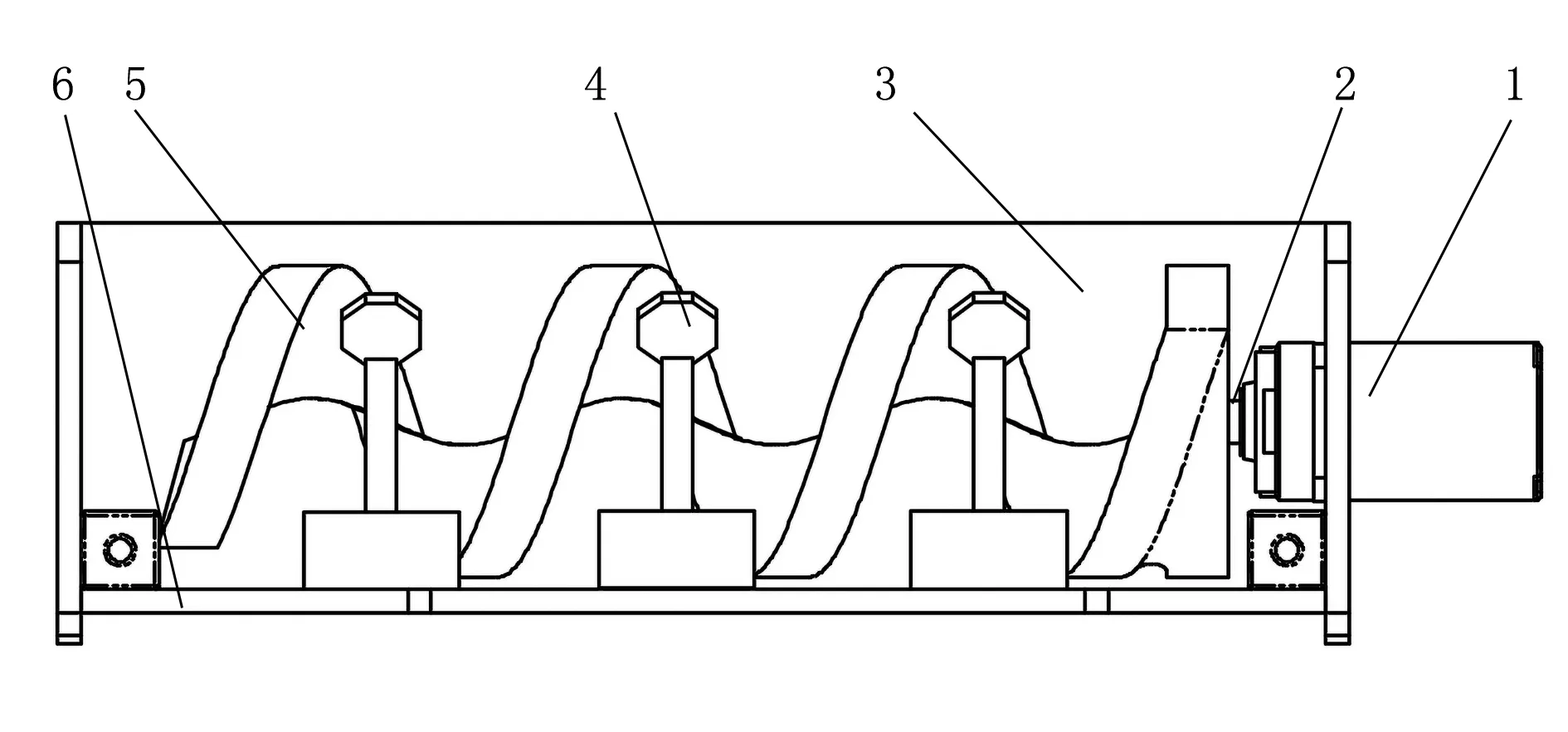
1.驱动装置 2.舵盘 3.苗补充盒 4.模拟种苗 5.螺旋体 6.出苗口图3 螺旋式推进机构结构图Fig.3 Mechanism structure of spiral propulsion
螺旋式推进机构主要由螺旋体、驱动舵机、法兰及苗补充盒等结构组成。其中,螺旋体的螺距40mm,起始角度180°,顺时针旋转,厚度最大为8mm。舵机通过法兰与螺旋体连接,控制该螺旋推进机构旋转。种苗在自重和螺旋体螺旋叶片阻挡的作用下,立在苗补充盒内;螺旋体旋转时,法向推力沿着苗补充盒轴向推动,将放置在螺旋体结构内的种苗依次推到苗补充盒出苗口,掉落进出苗口下方的精确作业辅助装置;当小车上搭载的视觉摄像头识别到落苗位时,单片机发送指令控制舵机旋转360°。该螺旋体结构可做到1圈1苗,有效地实现了作物幼苗的补充、种子的输送等功能,避免了漏种、多种的情况。
1.3.2施肥模块设计
施肥模块包括肥料补给盒和施肥可调节机构,如图4所示。
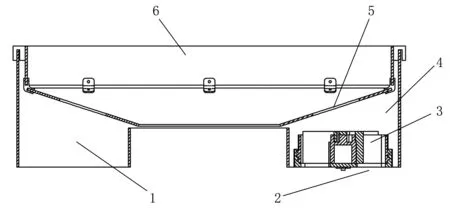
1.电源模块放置处 2.肥料出料口 3.施肥可调节机构 4.施肥模块外壳 5.肥料补给盒图4 施肥模块示意图Fig.4 Schematic diagram of fertilization module
肥料补给盒用来存放肥料,对施肥可调节机构进行肥料补给。施肥可调节机构由梅花手柄螺栓、调节转板、施肥可调节机构外壳和底盘构成,如图5所示。
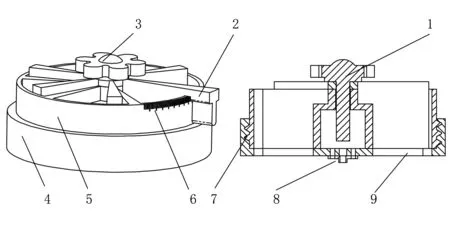
1.柄固定螺母 2.调节转板 3.手梅花手柄螺栓 4.施肥可调节机构底盘 5.施肥可调节机构外壳 6.刻度 7.施肥可调节机构外壳和底盘螺纹连接处 8.舵盘 9.肥料出料口图5 施肥可调节机构结构简图Fig.5 Structure diagram of fertilizing adjustable mechanism
施肥可调节机构外壳外标有刻度,使用者只需调节机构里面的转板位置,选择所需要的肥料使用量,再用梅花手柄螺栓锁紧即可。该结构分为施肥进料区域和出料区域,肥料补给盒对进料区域进行肥料装填;当识别到施肥位时,单片机将信号传递给施肥可调节机构,机构底部舵机控制机构水平面旋转,将已装填好定量肥料的肥料块旋转到出料区域,进行当前施肥流程。该机构可调节肥料进给量,提高施肥的精准度,减少肥料浪费,且拆装简单方便清洗,可以装填多种形态的肥料。
1.3.3精确作业辅助装置
精确作业辅助装置安装在移栽补苗模块主体下方,由落苗保护支架、舵机支架、舵机及其他标准零部件组合而成,如图6所示。
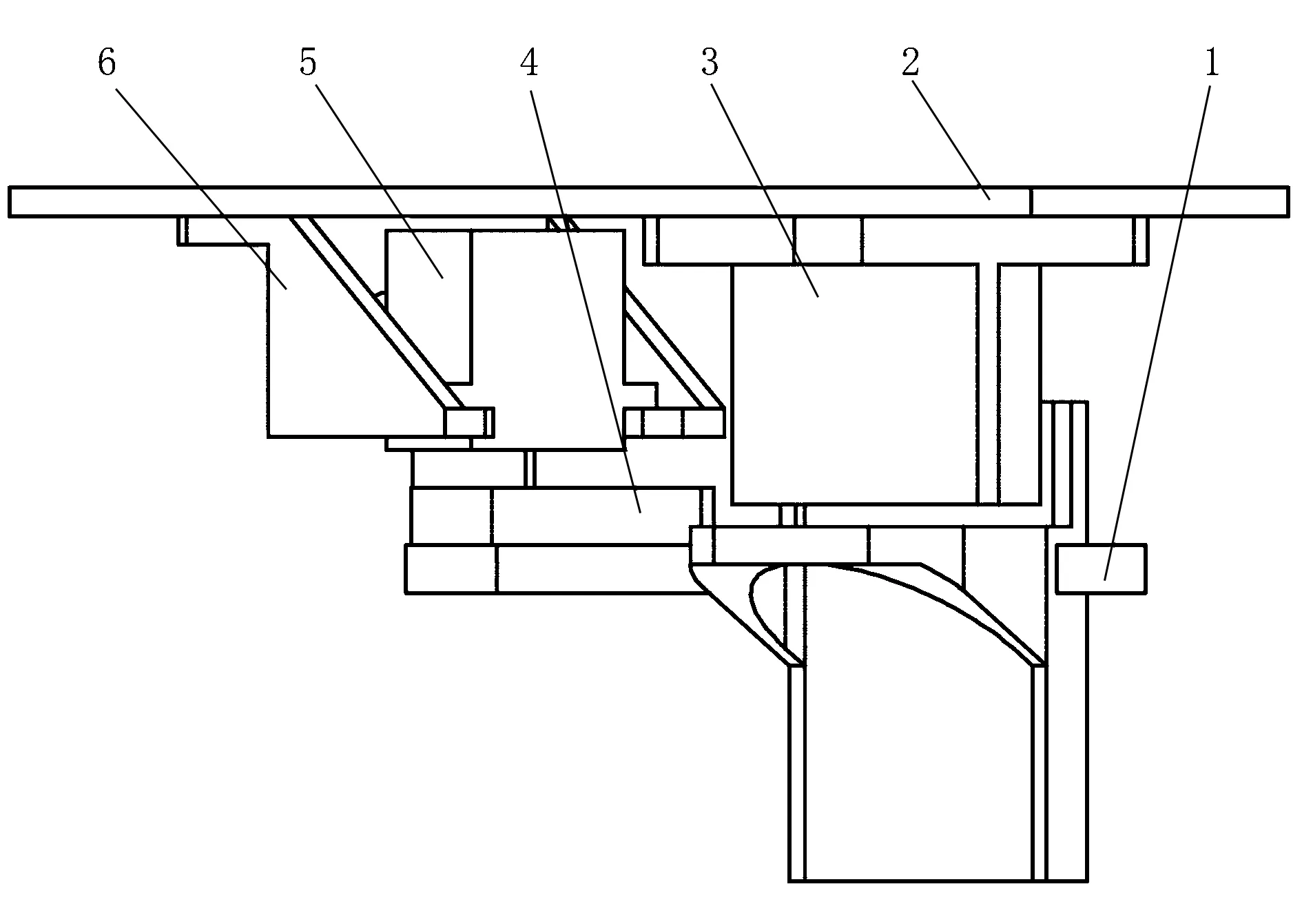
1.落苗保护支架 2.落苗模块下方板材 3.落苗出口 4.舵机摆臂 5.数字舵机 6.舵机支架图6 精确作业辅助装置示意图Fig.6 Schematic diagram of precision operation AIDS
该装置的作用在于移栽补苗作业时通过落苗保护支架辅助苗种下落至目标坑位不倒伏,减少种植过程中出现的苗倒伏的情况。当小车结束落苗作业时,舵机控制落苗保护支架水平旋转180°,避免落苗保护支架撞到已种植完成的农作物。
2 避障与视觉系统设计
2.1 自动避障系统设计
超声波不受色彩、磁场、光线等影响因素的干扰,测量与周围物体的距离并将测距信息作为处理器输入量;同时,超声波模块具有能够在黑暗或灰尘多的环境里正常运行、硬件成本低等优点,在移动机器人设计领域被广泛使用[9]。由于丘陵地区的田块较小,超声波的测距范围足够满足丘陵多功能移栽施肥农作小车的工作需求,故小车的自动避障系统采用模糊控制技术,使用多个超声波融合的方式来提高小车的定位准确度。在跨垄式行进底盘的前面、后面、内左、内右4个方向各安装了1个HC-SR04超声波模块,用来测量与田块边缘距离和与垄道的距离。传感器的位置分布如图7所示。
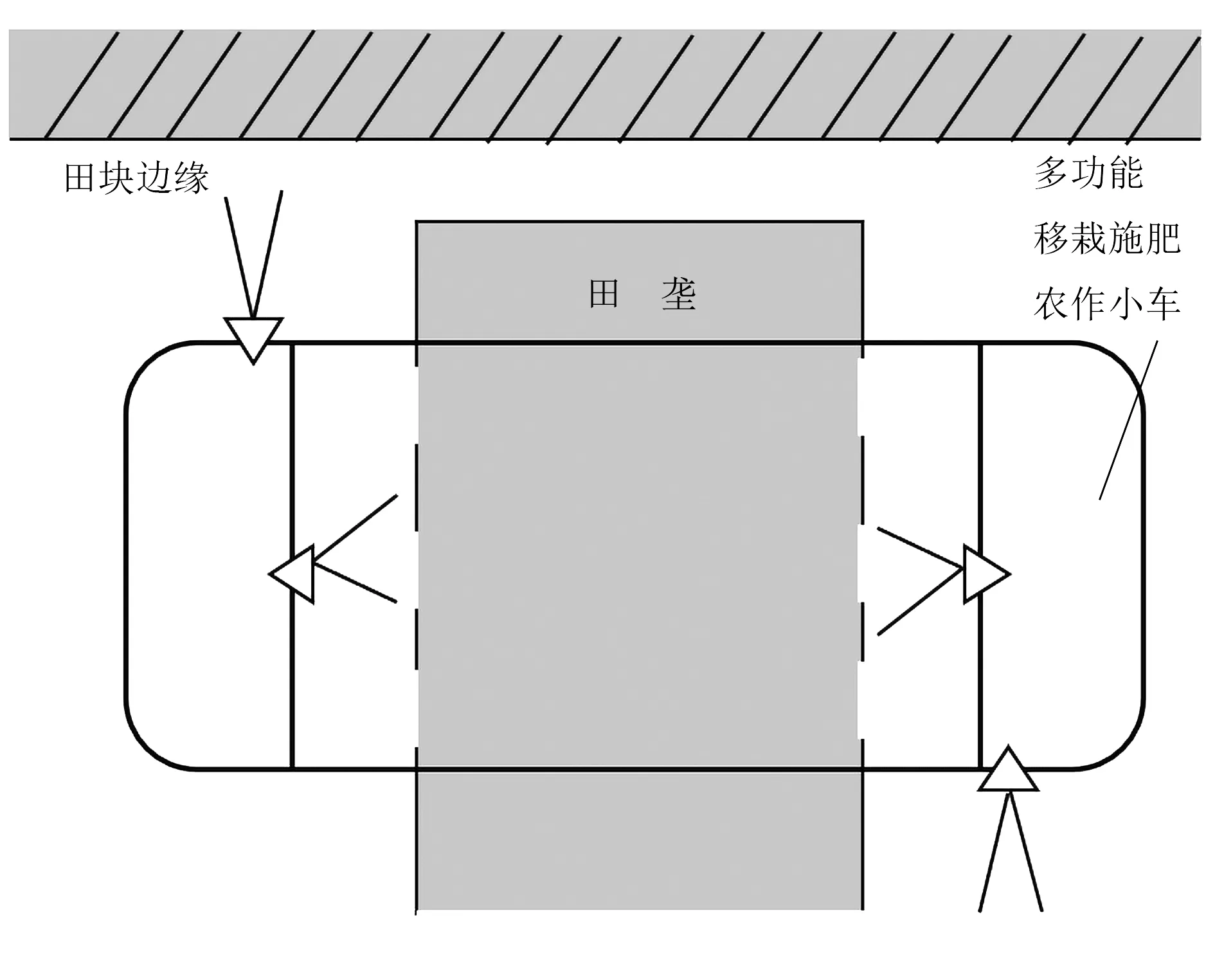
图7 超声波传感器分布图Fig.7 Distribution of ultrasonic sensors
将4个传感器的测距信息作为主机的输入量,经过STM32F105R8T6处理器将处理输出,控制小车的运动方向。在农耕作业过程中,小车整机动作分为垄道上方前进动作和更换垄道动作,故在算法上设计整机动作为前进模式和避障模式。前进模式是算法根据内左和内右的两个超声波对垄道边缘的测距信息作为输入,来控制小车车身平行于垄道行驶。小车从起始位置出发默认为前进模式,基于该模式小车在视觉识别的辅助下进行农耕作业活动。避障模式下,算法以前后的超声波对垄道边缘的距离作为输入,当一方的距离小于40mm时小车停止前进,左边或右边移动适当距离。当避障模式结束后,小车切换回前进模式。在小车完成当前农耕作业任务过程中,根据4个传感器的测距信息来切工作模式,直至完成作业任务。避障模式和前进模式切换的切换关系如图8所示。
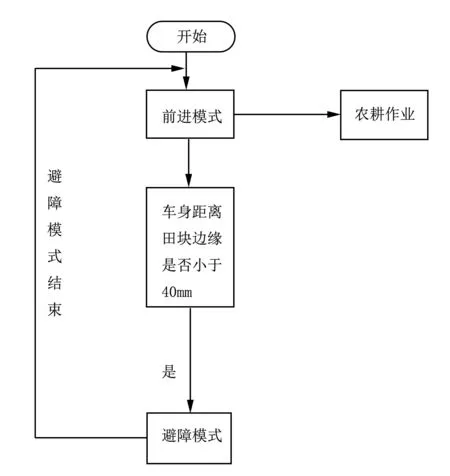
图8 前进模式和避障模式间切换关系Fig.8 Switching relationship between forward mode and obstacle avoidance mode
2.2 机器视觉系统
机器视觉实时拍摄并处理当前图像信息,获取当前区域范围的障碍物信息。相较于其他传统传感器,机器视觉所使用的摄像头不发射信号影响外界环境,通过相机可以获得更宽广的视角,且价格更低,故作为农业机械的障碍物检测和识别更具有优势[10]。由于丘陵种植的大部分农作物颜色单一,植株颜色与周围土壤环境的色差明细,因此采用色块捕捉技术对摄像头捕捉到的图像进行色块分析。机器视觉系统主要由openMV摄像头、MT9M114感光元件、STM32F7处理器和LED灯带组成。摄像头安装在小车的上层结构下方,并在其周围粘贴LED灯带,用来补充由于车身遮挡而减少摄像头视野里的光源,避免摄像头因环境光影响而降低识别率。当小车在田地里运行时,实时采集垄道上的图像,利用Python语言将摄像头捕捉到图像进行二值化处理;当捕捉到农作物的图像时,通过STM32F7处理器将结果输出,控制小车停下;将信号传递给上层结构,控制模块内的舵机旋转,完成当前种植任务。计算机视觉系统的安装位置如图9所示。
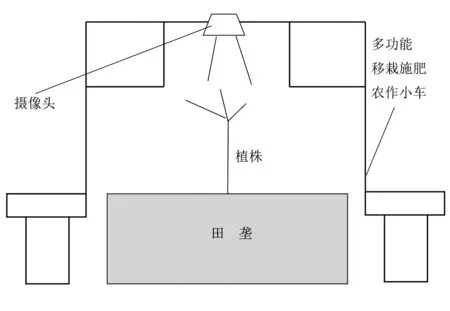
图9 计算机视觉系统Fig.9 Computer vision system
3 整机性能试验
3.1 试验方案
为验证丘陵多功能移栽施肥农作小车的稳定性和准确性,设计了模拟丘陵地区小田块种植的实际状态的小田块移栽和施肥试验区,进而对小车整机系统的工作性能进行试验。试验区四周用高15cm的围栏围住,内场地设有5条长240cm、宽30cm、高12cm的模拟田垄,相邻田垄之间、围栏与田垄留有垄沟,垄沟宽30cm;在每条垄沟铺放丙纶地毯,用来以模拟田地的松软路面,如图10所示。试验使用ABS材料打印的RGB值为(0,255,0)仿真农作物进行移栽试验,作业肥料使用直径约4mm PP塑料小球模拟。
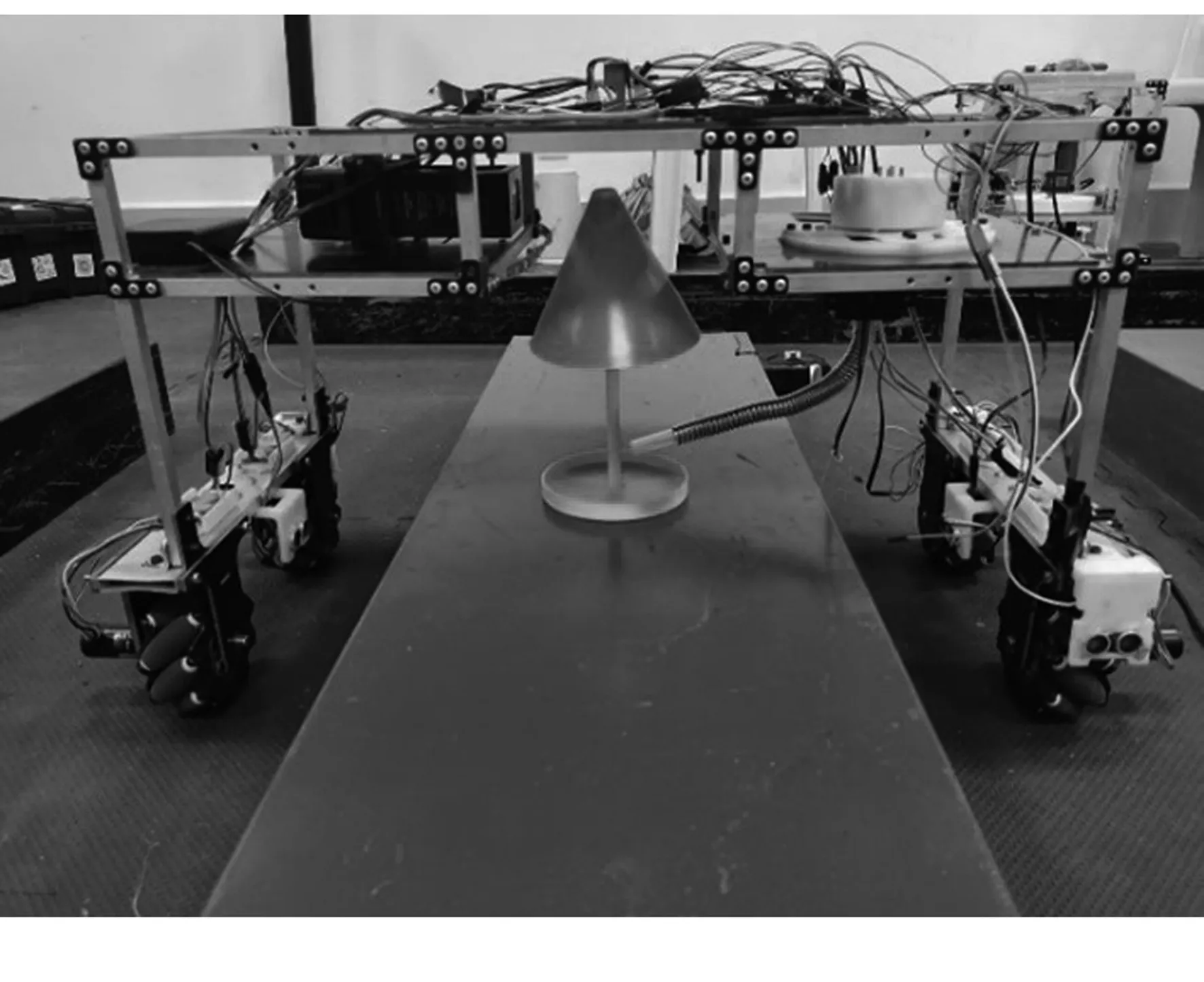
图10 丘陵多功能移栽施肥农作小车现场测试Fig.10 On site test of multifunctional transplantation and fertilization of farm cars in hills
3.2 性能试验
3.2.1移栽性能试验
移栽功能试验使用高度为5cm仿真种苗,如图11所示。试验时,将上层模块更换为移栽补苗模块,装填仿真种苗,在控制面板上选择株距,并在垄道对应位置放置圆形靶;每种间距进行不少于10次测试,取测试结果的平均值算出丘陵多功能移栽施肥农作小车在不同间距下移栽的成功率和准确率。在移栽过程中,模拟苗种落地后不倒伏即为移栽成功;模拟苗成功落地后苗底座完全落在圆形靶靶心内,即为准确移栽。选取10~25cm的5个间距进行多次移栽测试,结果如表1所示。
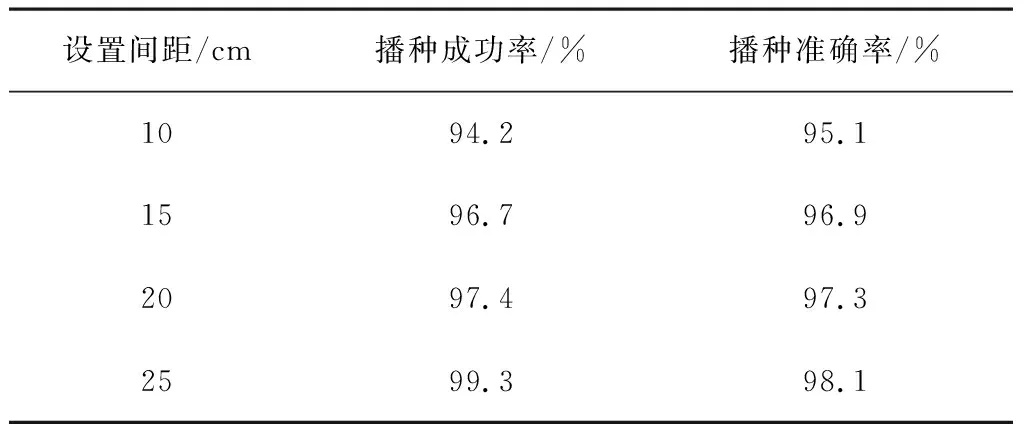
表1 移栽功能试验Table 1 Seeding function test
3.2.2施肥功能测试
施肥功能试验使用高度为20cm仿真植株,仿真植株下放设置底盘用来收集小车补给的肥料,如图11所示。在每个田垄上沿中线根据已设置的株距放置好仿真植株,将上层模块更换为施肥模块,装填模拟肥料,手动调节施肥模块设置施肥量。取不同间距和不同的施肥量进行测试,结果如表2所示。
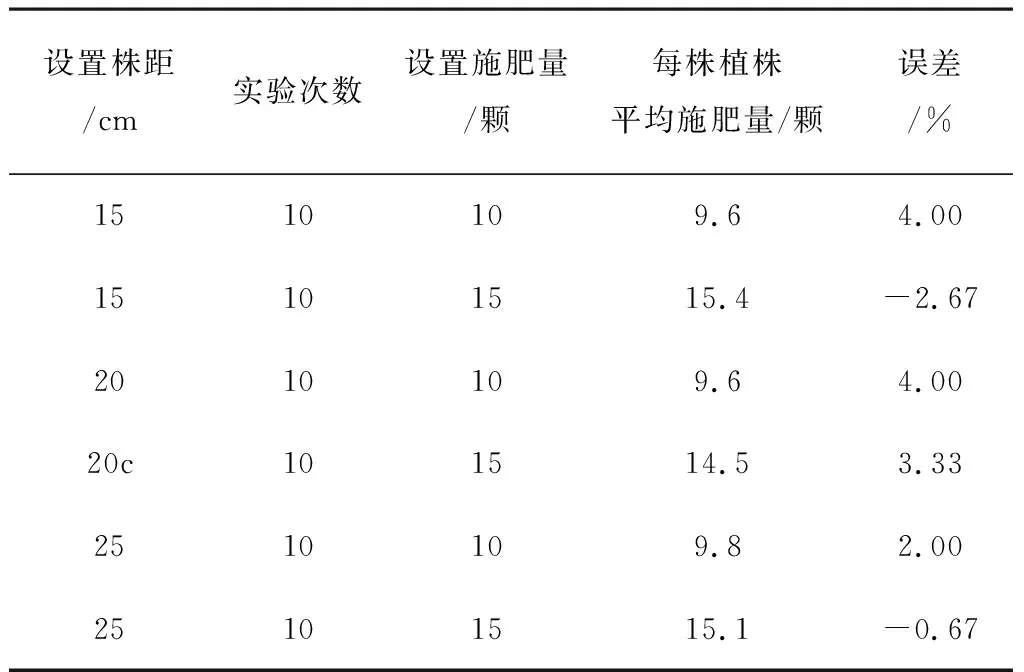
表2 施肥功能试验Table 2 Fertilizing function test
4 结论
1)整机采用了跨垄式底盘结构设计,体积小,结构简单轻便。小车使用麦克纳姆轮,能够在小田块中实现高效移动,通过性良好。同时,搭载了轻量化的可拆卸上层结构,只需更换模块即可实现多种蔬菜的移栽和施肥作业要求,满足丘陵山区多功能农耕作业机的作业需求。
2)移栽补苗模块利用螺旋式推进机构可有效地实现作物幼苗的补充、种子的输送等功能,能够明显地改善卡苗、伤苗、漏苗的现象,提高移栽效率。
3)施肥模块的施肥可调节模块结构简单,可手动选择当前农耕活动所需要的肥料量,操作方便,有效地提高了肥料的利用率。
4)小车整机性能试验表明:在设置间距10~25cm的株距下,移栽平均准确率在96.85%,施肥误差在4%以内。上层结构的种补苗模块和施肥模块的运行性能良好,能够高效完成丘陵地区小田块的农耕作业活动,具有较高的通用性和利用率,市场前景广阔。
