基于超声波技术的风送式智能烟草植保机设计与试验
2023-10-17马留威王龙飞李连豪冉云亮朱晨辉范沿沿
马留威,王龙飞,李连豪,冉云亮,朱晨辉,范沿沿,张 振
(1.河南农业大学 机电工程学院,郑州 450002;2.河南省烟草公司许昌市公司,河南 许昌 461000)
0 引言
烟草是我国主要的经济作物之一[1-2],植保作业是烟草种植生产过程中的重中之重,是影响烟草产量和质量的重要因素[3]。早期,学者对烟草和其他高秆作物的植保作业机进行了研究[4]。张铁和董祥等人设计了一种轻便型高地隙喷杆喷雾机,搭配风幕辅助喷雾系统,提高了雾滴在作物中下层及叶面背面的附着率,但地面流失率有所增加[5]。张疼等人设计了一种三位一体多功能喷雾机,集喷杆式、隧道式、仿形式于一体,适用于大田作物不同生长期[6]。孙文峰和何跃等人设计了一种宽幅植保作业机可液压折叠的喷杆,提升了大田作物在中后期其中下层及页面背部的雾滴沉积效果[7]。
上述研究在实际作业过程中均存在着智能化程度低、雾化雾滴大、穿透性差、药液在喷施过程中的浪费和不均匀(药液在烟叶上表面和下表面分布不均及药液在上层烟叶与中下层烟叶分布不均)等问题,一定程度上增加了烟草作业成本,造成了环境的破坏。
针对上述问题,采用超声波雾化、智能控制和风送技术[8-11],利用超声波雾化产生的雾滴小、能提高药液在烟叶表面上的附着性、风机旋转产生的气流在增加雾滴动能的同时还能提高其穿透性以及当气流到达烟叶表面时其扰动作用还能使雾滴在烟叶正反面均匀附着等优点,设计开发了一款基于超声波技术的风送式智能烟草植保机。
1 整体设计及工作原理
1.1 整机组成
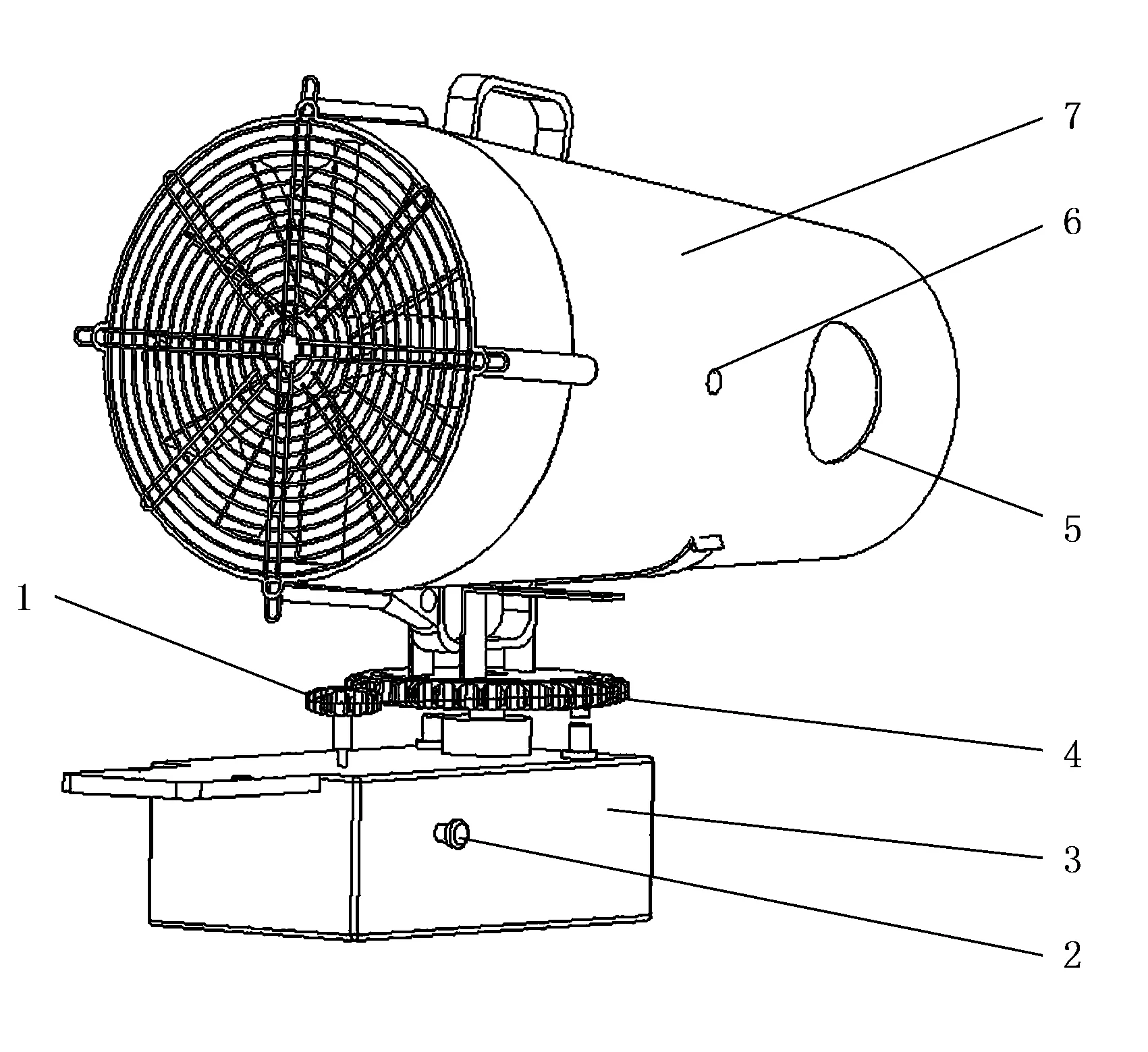
整机主要由自走式电动行驶底盘、超声波雾化系统、风送喷雾系统和控制系统等组成,如图1所示。主要工作参数如表1所示。
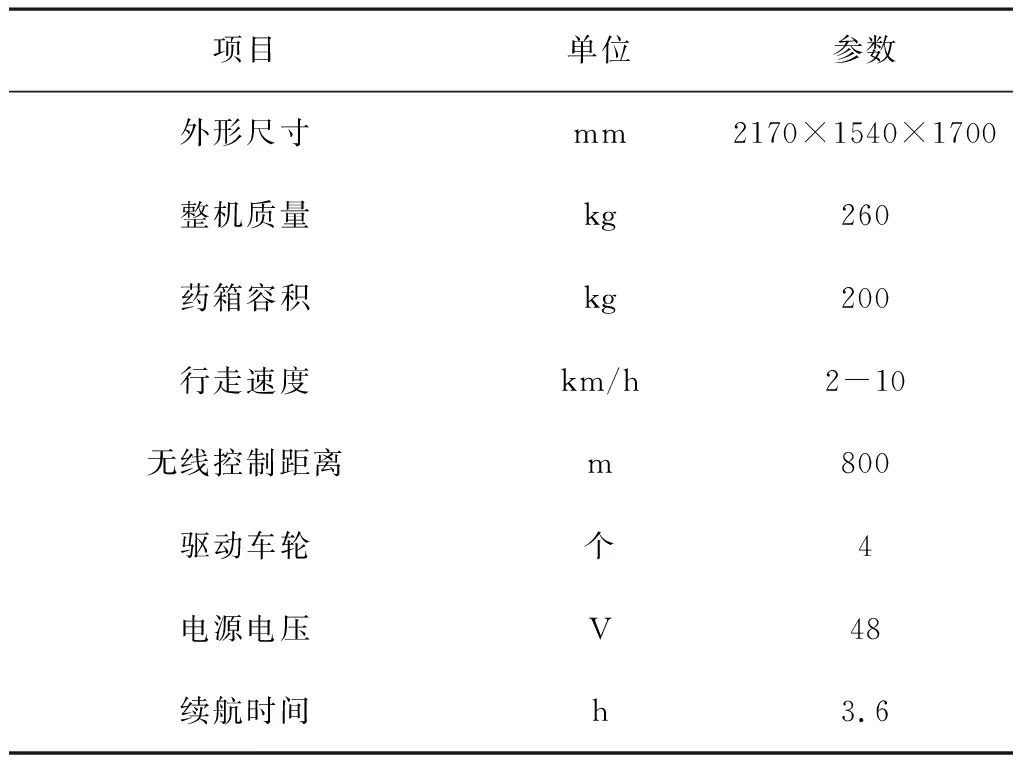
表1 主要工作参数Table 1 Main working parameters
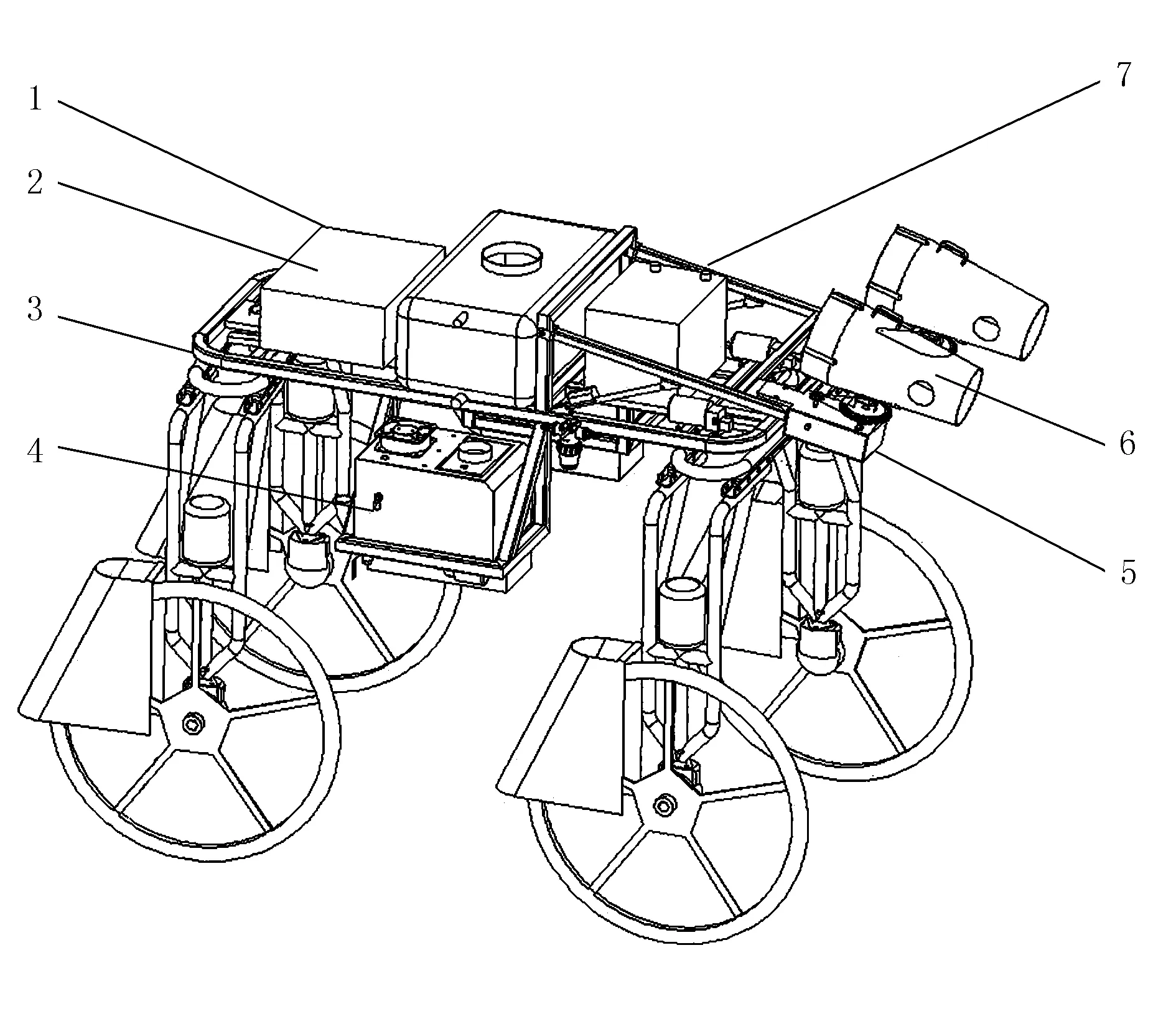
1.药箱 2.电源箱 3.自走式行驶底盘 4.超声波雾化发生器 5.摇摆器 6.喷桶 7.电控箱图1 基于超声波技术的风送式智能烟草植保机Fig.1 Air driven intelligent tobacco plant protection machine based on ultrasonic technology
1.2 工作原理
植保机的行走系统、风送喷雾系统均采用独立的动力源,由各自的电源输送给电机提供动力。工作过程:首先,通过遥控手柄或者在自动模式下按照预先输入的路径信息将基于超声波技术的风送式智能烟草植保机移动至作业位置;在作业机匀速行驶状态下,打开风送喷雾系统开关,超声波雾化发生器雾化产生细小的雾滴经雾化风扇提供的动能通过管道进入喷桶和喷嘴产生的雾滴混合,轴流风机产生的气流为混合后的雾滴提供动能,增加其冲程且能对雾滴二次雾化;二次雾化后的雾滴随气流被输送到烟叶表面,由于雾滴小和气流的扰动作用,雾滴将烟叶上下表面包裹,达到了对烟叶正反面均匀施药的目的。
2 关键部件设计
2.1 超声波雾化发生器
超声波雾化作为一种新的雾化方式,主要原理是利用高频振动产生激波,将水和液体药液混合物分子结构打散产生极小雾滴,进而形成雾滴集群。经超声波雾化产生的雾滴具有粒径小、分布均匀等特点,但其具有的动能较小、冲程较短[12]。
2.1.1整体结构
超声波雾化发生器设置在植保机的左右两侧,设置为上下两个串联的水和药液混合箱,上部设置有超声波雾化器、雾化风扇、导流板等雾化发生器所需的主要部件,下部主要是为了接收上部达到超声波雾化最优液面后通过溢流管溢流而出的水和药液混合物,再由水泵经回流管重新回到上部箱,以达到循环利用的效果。同时,超声波雾化发生器产生的雾滴由雾化风扇提供动力,经出雾口过管道到达喷桶内部和喷头产生的药液混合,具体结构如图2所示。
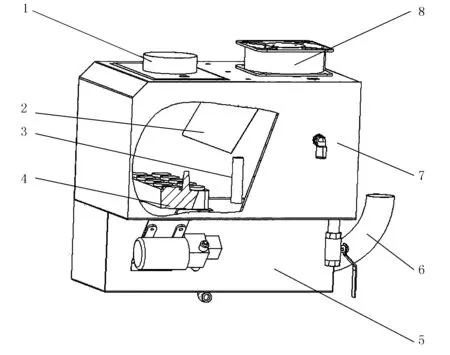
1.出雾口 2.导流板 3.溢流管 4.超声波雾化器 5.下部药液混合箱 6.回流管7.上部药液混合箱 8.出雾口图2 超声波雾化发生器Fig.2 Ultrasonic atomizer
2.1.2超声频率确定及雾化器选型
超声波雾化性能试验主要包括雾滴粒径、雾化量等参数。其中,超声波雾化器雾化产生雾滴的粒径与所雾化液体的多种性质有关,如液体的表面张力系数、密度等,也和超声频率有关[13-14]。超声波雾化器雾化产生雾滴的粒径计算公式为
(1)
其中,D为雾滴粒径(μm);T为表面张力系数(N/m);ρ为液体密度(kg/m3);F为超声频率(kHz)。以常温下(20℃)水和药液混合物为例,即取表面张力系数T=7.28×10-2N/m、密度ρ=1×103kg/m3,可得雾滴的粒径D与对应超声频率F的关系如表2所示。
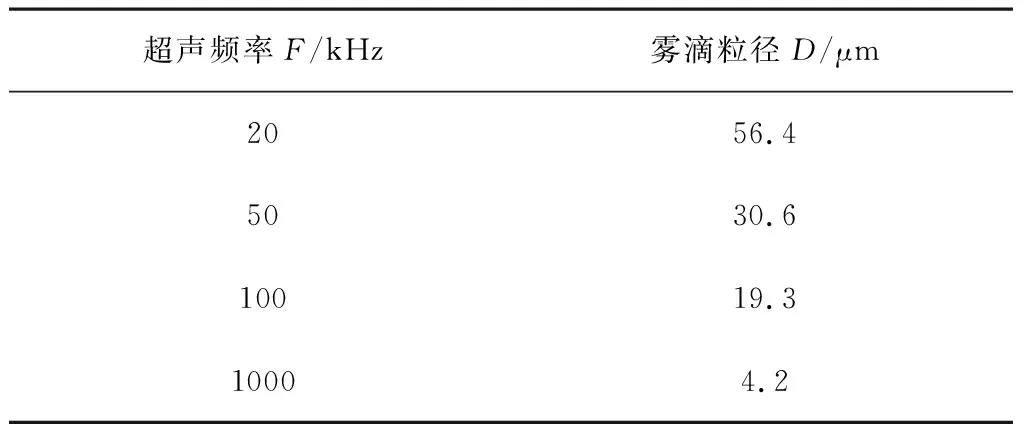
表2 超声频率F与对应雾滴粒径DTable 2 Ultrasonic frequency F and corresponding droplet size D
本设计所需的雾滴粒径D小于20 μm,以常温下(20℃)水和药液混合物为例,带入式(1)可得超声频率F应大于94.8kHz。结合市场上现有成熟技术,该超声波雾化发生器的雾化器选用YCJH型雾化器,其工作电压为36V或者48V,频率为1.7MHz。
2.1.3最优液面确定
为确定超声波雾化液面是否达到最优条件对雾化量的影响,对超声波雾化最优液面的确定做了相应的试验。
前期试验表明:水和药液混合物的液面在低于60mm和高于70mm情况下,雾化效果明显差于液面位在60~70mm之间,且同一液面状态下不戴聚能罩比戴聚能罩雾化效果好。所以,该试验只在60~70mm之间、全部不戴聚能罩的条件下选取3组液面值测量雾化量,其雾化液体所处液面与对应雾化量的关系如图3所示。
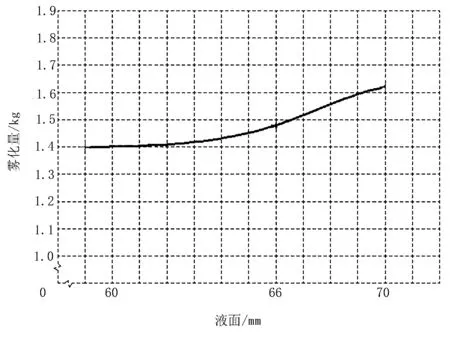
图3 单板、48V、无聚能罩、20min雾化数据图Fig.3 Atomization data chart of single board, 48V, without shaped charge cover and 20min
通过试验数据和由试验数据做出的大致雾化数据图可知:液面介于66~70mm之间雾化效果良好,定为最佳液面,液面在此区间单板的超声波雾化量可达到4.44~4.86kg/h。
2.2 风送系统
风送系统主要由轴流风机和风送机构组成:轴流风机为雾化后的药液提供动能,增加其冲程;风送机构内设导叶,将风机产生的气流整合,在风筒中将超声波雾化和液力喷头雾化产生的药液混合及二次雾化后,雾滴随气流到达烟叶表面。
2.2.1风机参数的确定
1)单风机风量的计算。根据风量置换原则,风量计算公式为[15-16]
Q≥KLHV
(2)
其中,Q为风量(m3/s);K为风量损失系数;L为喷雾宽度(m);H为喷雾高度(m);V为植保机行进速度(m/s)。
通过测量,可得L=1.2m、H=1m、V=1m/s。查阅资料,K可取1.1~1.5,这里取K=1.1。代入(2)式,可得Q≥1.32m3/s。
2)单风机风压的计算。由伯努利方程得
(3)
其中,Wp为风机静压(Pa);ρ为空气密度(kg/m3);V为风速(m/s);γ为单位体积空气重力(N/m3);g为重力加速度(m/s2)。
将标准条件下g=9.8m/s2、γ=12.25 N/m3,代入式(3)中可得
WP=0.625V2
(4)
将V=20m/s代入式(4),得到Wp=250Pa;再乘以风压系数K=1.4,得Wp=350 Pa。
2.2.2喷桶及摇摆器
该植保机风送喷雾系统将超声波雾化产生的雾滴和喷头产生的药液在喷桶内的喷头处混合,雾滴包裹着水和药液混合物,然后一起输送到烟叶上,因此设计了一个能达到工作需求的喷桶;同时,为了保证喷药范围,在喷桶下面设置1个摇摆器。喷桶及摇摆器的具体结构如图4所示。
1.传动齿轮 2.摇摆器开关 3.摇摆器 4.转动齿轮 5.雾滴输入口 6.药液输入口 7.喷桶图4 喷桶及摇摆器Fig.4 Bucket and shaker
超声波雾化产生的雾滴经雾滴输入口进入喷桶,药液从药箱经过过滤器及喷药泵经过药液输入口到达喷桶内的喷头处,两者在喷桶内的喷头处充分混合;雾滴对药液进行有效包裹,由轴流风机产生的气流带动雾滴和药液一起到达烟叶表面。
摇摆器的设计主要是为了调整喷药范围,主要由摇摆电机、转动齿轮、传动齿轮以及链条构成。电机输出端和转动齿轮同轴,转动齿轮与传动齿轮之间采用链条啮合,喷桶位于转动齿轮之上,摇摆电机提供动力,带动喷桶水平转动。通过对摇摆器摆动最大角度时极限位置的调整,能够有效调整水平喷射范围。同时,摇摆器位于机架上,可通过电动推杆调整喷桶高度,以此达到喷药水平范围和喷药高度范围同时可调的目的。
2.3 控制系统
2.3.1系统硬件框架
风送式烟草植保机可以采用手动和自动两种控制模式[17]。在自动模式下,输入预定路径的KML数据,控制器通过读取IMU姿态信息和GPS卫星定位信息调整转向,控制驱动电机按照预定路径自主行走。控制器使用了脉冲触发开关控制开闭风送喷雾系统,系统硬件框图如图5所示。
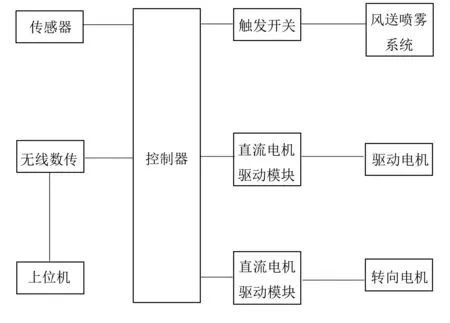
图5 系统硬件框Fig.5 System hardware frame
2.3.2硬件选择
1)通讯与控制方式。上位机控制软件采用QGroundControl,作业车与地面站之间的通信采用3DR公司的SiK无线通讯模块。使用遥控器控制植保机时,手动控制植保机的前进、后退、转向、制动和风送喷雾系统开关;接收机接受遥控的发射信号并传递给主控制器,控制器根据信号值来调整作业车的工作状态。
本文根据植保机作业需要采用的遥控器工作频率为2.4GHz,采用脉冲宽度调制(PWM)发送信号。脉冲宽度决定了通道的输出值,PWM信号的宽度在1000~2000 μs之间变化,中值为1500μs。所选用的遥控器如图6所示。

图6 遥控器Fig.6 Remote control
2)单片机型号选择。根据实际应用情况和各单片机优缺点后,决定采用ATMEGA2560-16AU型单片机作为该植保机控制系统的核心,其系统工作稳定、运算速度快、功耗低。工作参数如表4所示。
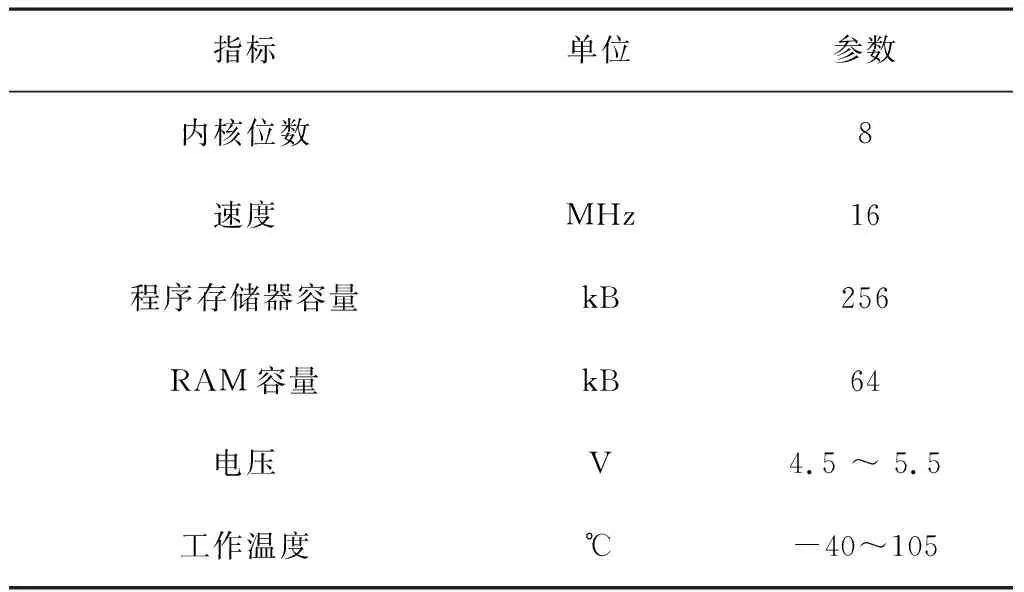
表4 控制芯片工作参数Table 4 Working parameters of control chip
2.3.3电机驱动模块电路设计
为了更好地连接控制系统和驱动电机,设计了一款适用于本植保机的驱动模块。其电路原理图如图7所示,转向电机控制电路图如图8所示。
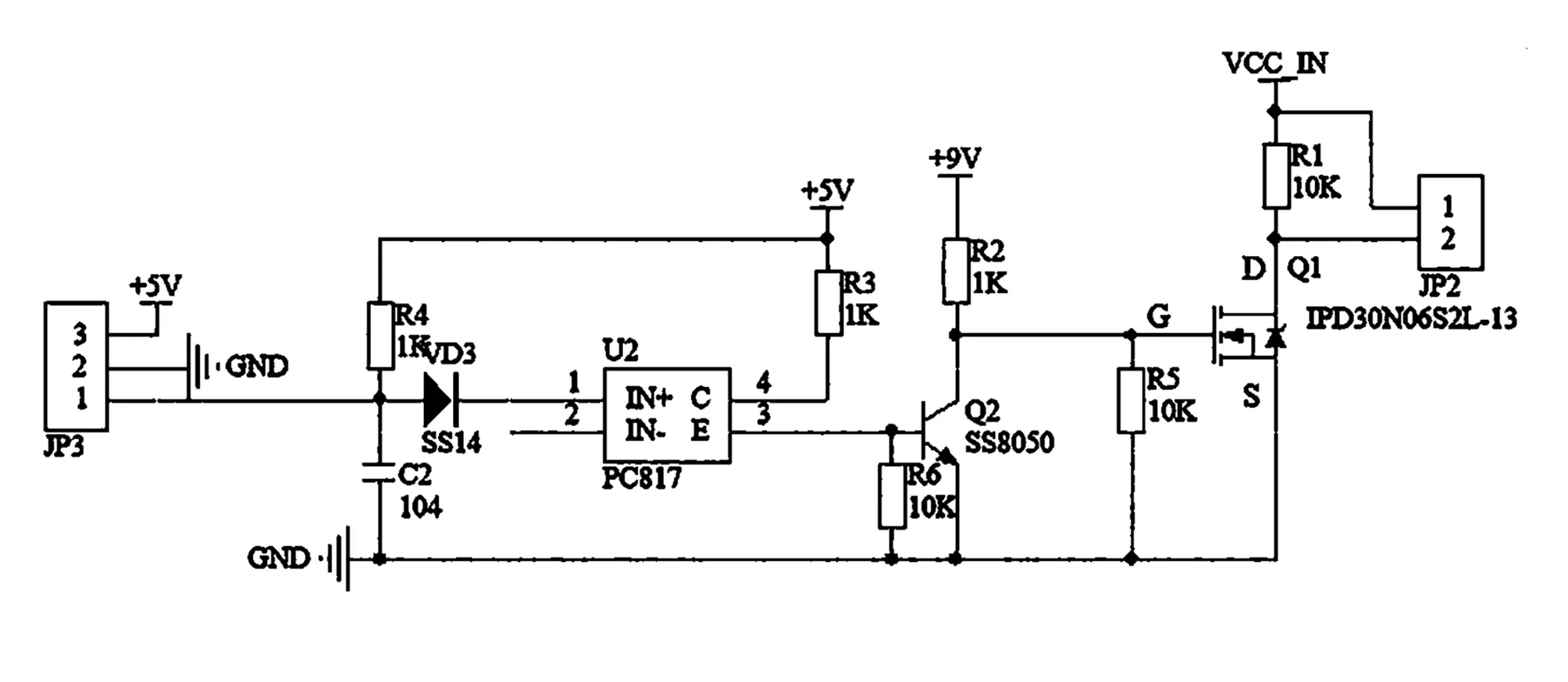
图7 电机驱动模块原理Fig.7 Schematic diagram of motor drive module
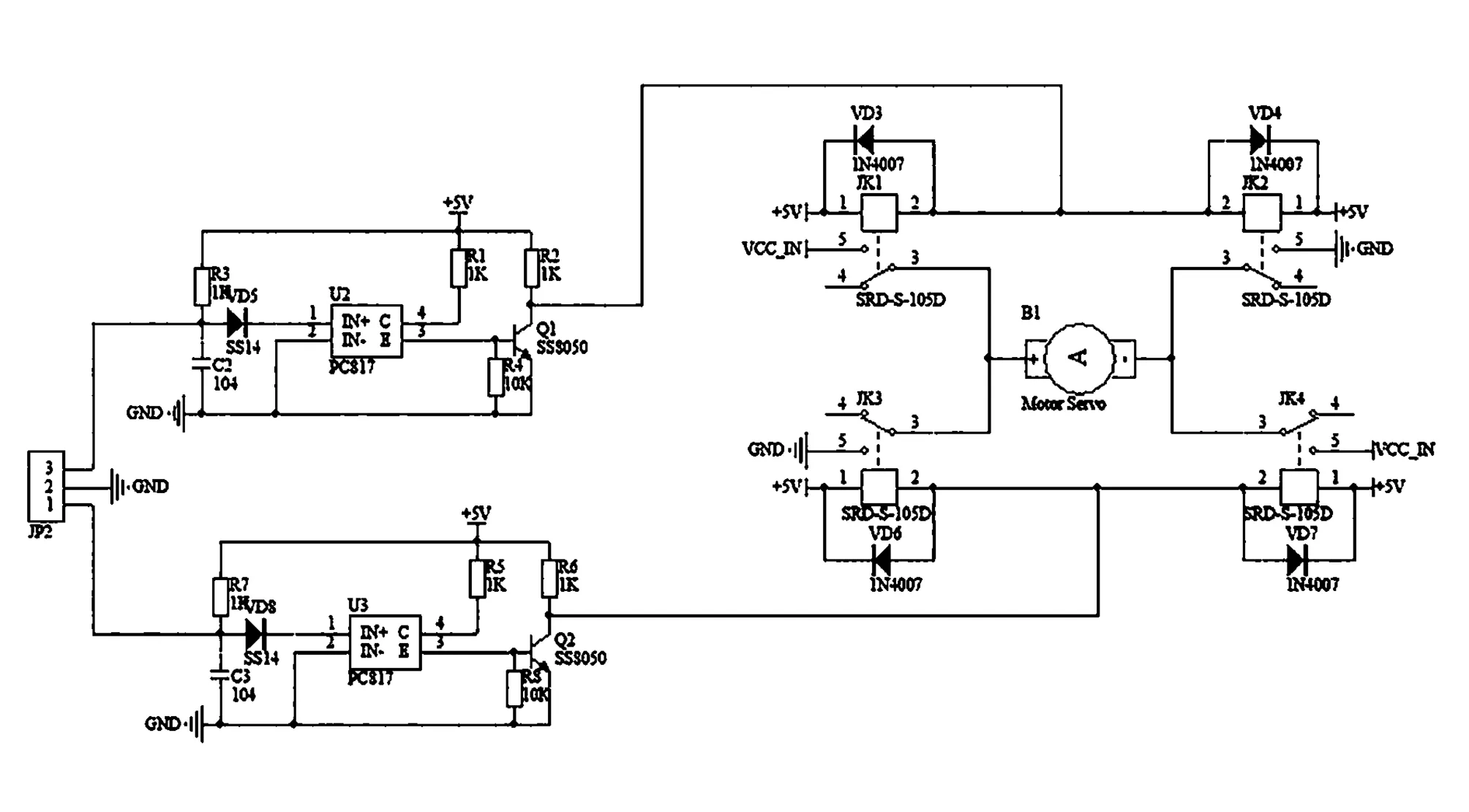
图8 转向电机控制电路图Fig.8 Control circuit diagram of steering motor
依据电路原理图进行印刷电路板(PCB)的设计。先检查硬件电路设计各元器件封装是否正确,再绘制元件库里没有的电子元件封装;将所有元件封装完成后,设计印刷电路板的物理层,根据印刷电路板形状对元器件进行布局和布线;最后,进行覆铜,完成印刷电路板的制作,如图9所示。PCB电路布局完成后阻焊、喷锡等工序交由某公司进行样板制作。
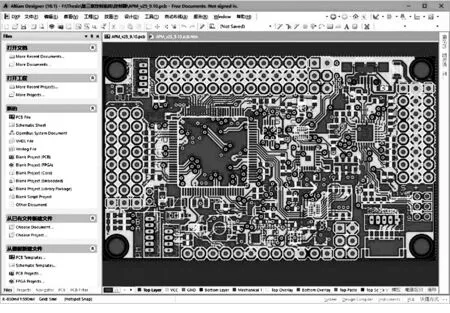
图9 电路布局Fig.9 Circuit layout
2.3.4控制程序设计
采用C++语言进行软件设计,利用Visual Studio Community 2017开发平台对项目进行修改和编译。开发环境界面如图10所示。
主程序是整个控制系统的核心,主要作用是完成控制系统中各个模块的初始化,对作业车的工作状态进行实时监控,连接各个子程序,根据作业状态实时控制各模块进行响应调节,实现整个控制系统的功能。
3 性能试验
2021年9月28日-10月13日,在河南省焦作市武陟县容大科技有限公司对基于超声波技术的风送式智能烟草植保机进行喷雾量、均匀性及喷幅的测试[18]。
3.1 喷雾量及均匀性测定
在无风的平地上利用水和药液混合物进行喷量试验,确定药箱和超声波雾化发生器的水和药液混合物液面初始位置,分别在压力为0.3、0.5、1.0MPa的情况下开始静止喷雾试验,10min后测量液面位置,得出喷量数值,并对均匀度进行检测,重复3次试验,取平均值并记录。不同压力下的喷量和均匀度试验数据如表5所示。
由表5可知:不同压力下喷头的试验喷量与理论喷量之间误差较小,即该喷雾系统的压损较小;同时,均匀度均能达到95%以上,可以满足工作需求。
3.2 喷幅测定
在无风的试验场地、喷雾机正常速度行驶状态下,使风筒垂直于行走方向打开风送喷雾系统,在风机不同挡位下测量喷洒到地面上的药液实际幅宽,测量3次取平均值并记录。试验结果如表6所示。
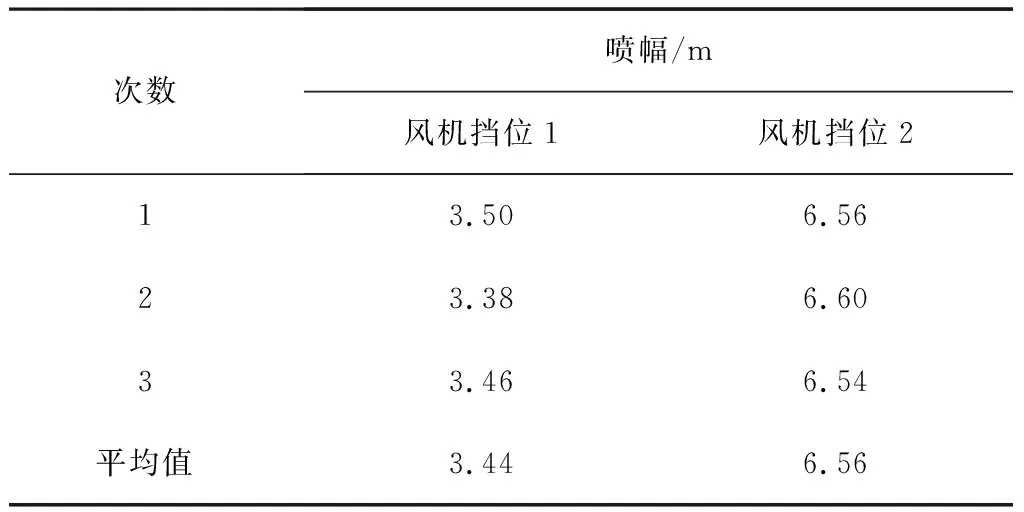
表6 不同挡位下的喷幅试验数据Table 6 Spray amplitude test data under different gears
由表6可知:风送式烟草植保机喷雾系统可以通过对风机风速的调节调整其喷施幅度,达到了完成烟草不同生长周期的植保作业的要求。
4 结论
1)对基于超声波技术的风送式智能烟草植保机喷雾系统进行了设计,并配合自走式电动行驶底盘能调整高度、行距和喷射角度完成了烟草不同生长周期的植保作业。
2)对影响喷雾性能的关键部件和参数进行了设计和讨论,并对超声波雾化发生装置的最优液面及对应雾化量进行了试验,确定了参数范围。
3)对该植保机的风送喷雾系统的风机参数进行了计算,确定了参数范围。
4)对该风送式烟草植保机进行了试验检测,其喷量、均匀性、喷幅均能达到工作需求。
