基于CAD/CAE技术的采摘机器人结构设计与仿真
2023-10-17王丽霞
王丽霞
(包头钢铁职业技术学院,内蒙古 包头 014010)
0 引言
我国果蔬种植面积很大,果蔬成熟后的采摘方式以人工为主,工作效率低,人力成本占到了总成本的1/2以上,且采摘质量无法保证,严重影响果蔬后续的加工、存储和销售[1]。随着我国人口老龄化的加剧和人工成本的提高,人们对于自动化采摘机器人的需求日益增加。但是,果蔬枝叶的生长存在很多的不确定性,果蔬生长位置为非结构位置,果实已破碎而果梗较为坚硬,都给采摘机器人的作业带来了一定的困难,限制了对采摘机器人结构的研发[2]。
CAD(Computer Aided Design)软件是几何建模软件,可采用计算机技术进行图纸的设计、修改和绘制[3-4]。随着CAD软件的发展,系统逐渐集成了CAE(Computer Aided Engineering)分析功能,即对几何模型进行分析计算。采用CAD/CAE软件进行产品的结构设计,可以有效指导产品几何尺寸的优化,显著缩短产品研发周期,提高研发效率。目前,该软件已经在工业制造领域(如航空航天和汽车制造领域)有了较为广泛的应用,但不包括农业领域。采摘机器人的结构较为复杂,作业过程中对于结构的要求较高,可以采用CAD/CAE技术对采摘机器人的手臂和末端执行器等精细结构进行设计。
仿真试验是利用计算机的仿真软件模拟实际的作业过程,既可以达到真实试验的效果,又能够有效降低研发成本。在此对设计的采摘机器人进行仿真试验。
1 结构设计
1.1 总体设计
采摘机器人主要组成包括控制系统、智能系统、执行机构、驱动传动装置及检测系统等,各结构之间的关系图如图1所示。
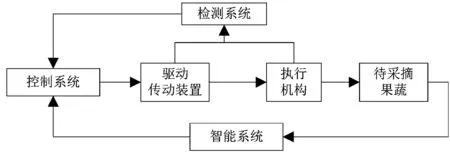
图1 采摘机器人各结构之间的关系图Fig.1 The relation diagram of each structure of picking robot
1.2 控制系统
控制系统是整个采摘机器人的核心部分。为了使机器人具有一定的开放性和较强的功能性,采用模块化设计,即可以通过增设或者改变接口的方式为平台增加传感器或者计算机等设备;同时,平台要求具有一定的计算能力,且控制成本。综合以上要求,采摘机器人的控制系统采用工控机加数据采集卡的方式设计,结构如图2所示。
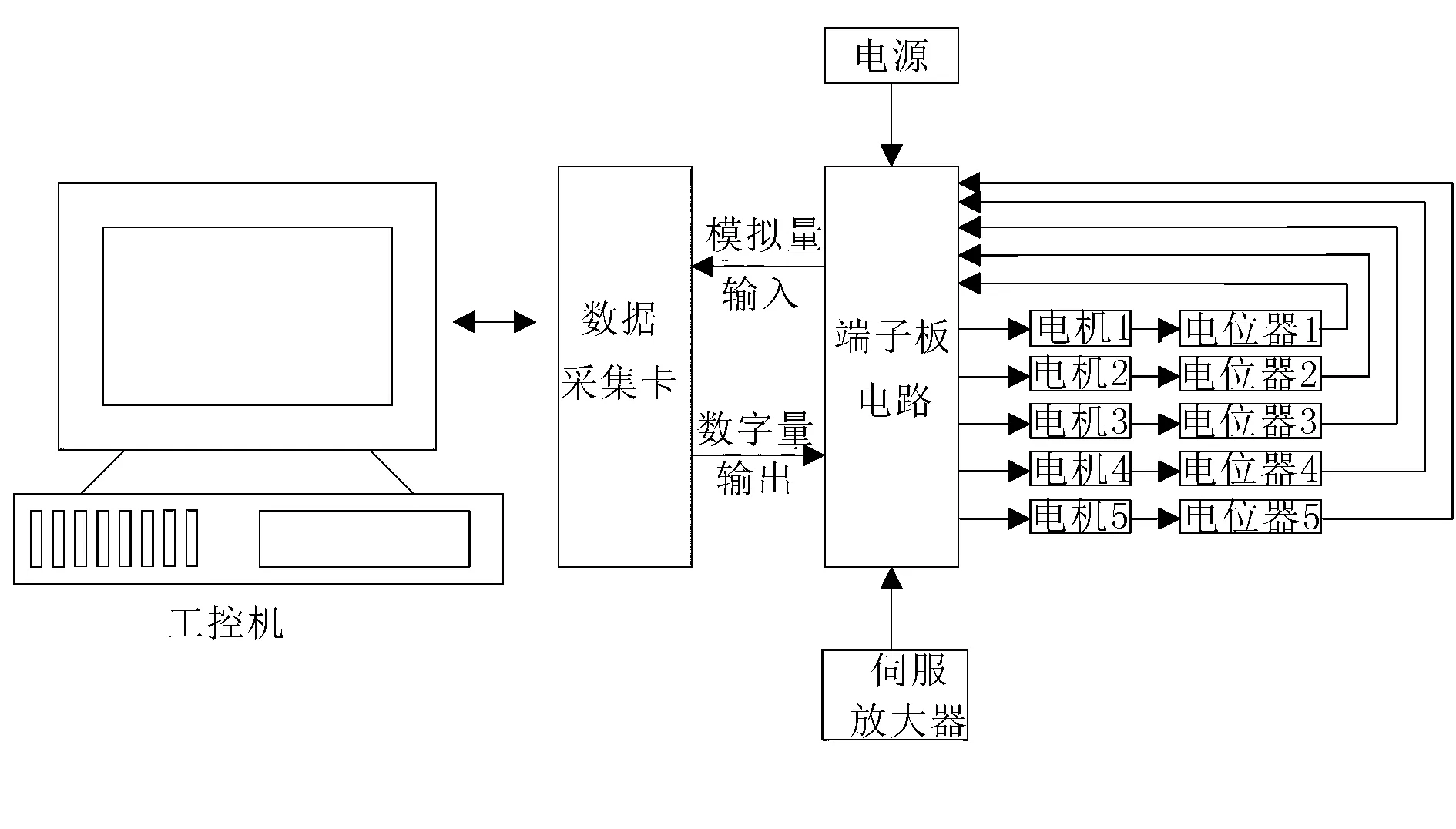
图2 控制系统结构简图Fig.2 The structure diagram of control system
工控机部分采用性能更优、对环境要求较低的工业控制计算机;数据采集卡采用采样速率较快的PCL-812PG型号;伺服放大器主要用于对伺服电机进行驱动,采用控制性能较好且性能稳定的Maxson型号,调节作业示意图如图3所示。端子板的作用是单独连接电器和采集卡以及对传递的信号进行调理,再继续进行信号的传输。
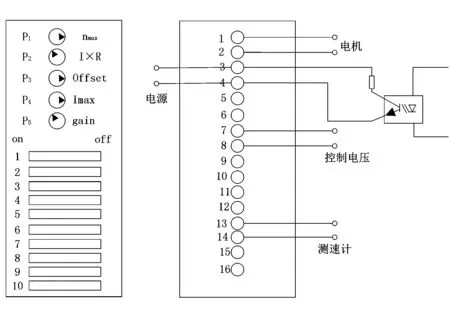
图3 伺服放大器调节作业示意图Fig.3 The schematic diagram of servo amplifier regulation operation
1.3 智能系统
智能系统主要用于提升采摘机器人的智能化水平(如增加视觉、感觉和语言装置),目前研究主要集中于“视觉”方面,即通过摄像机识别和躲避障碍物,同时进行视觉导航。一般视觉导航用到的硬件设备包括摄像机、镜头、工控机、光源和内存卡,通过在智能系统安装相应的软件进行图像的处理,流程如图4所示。
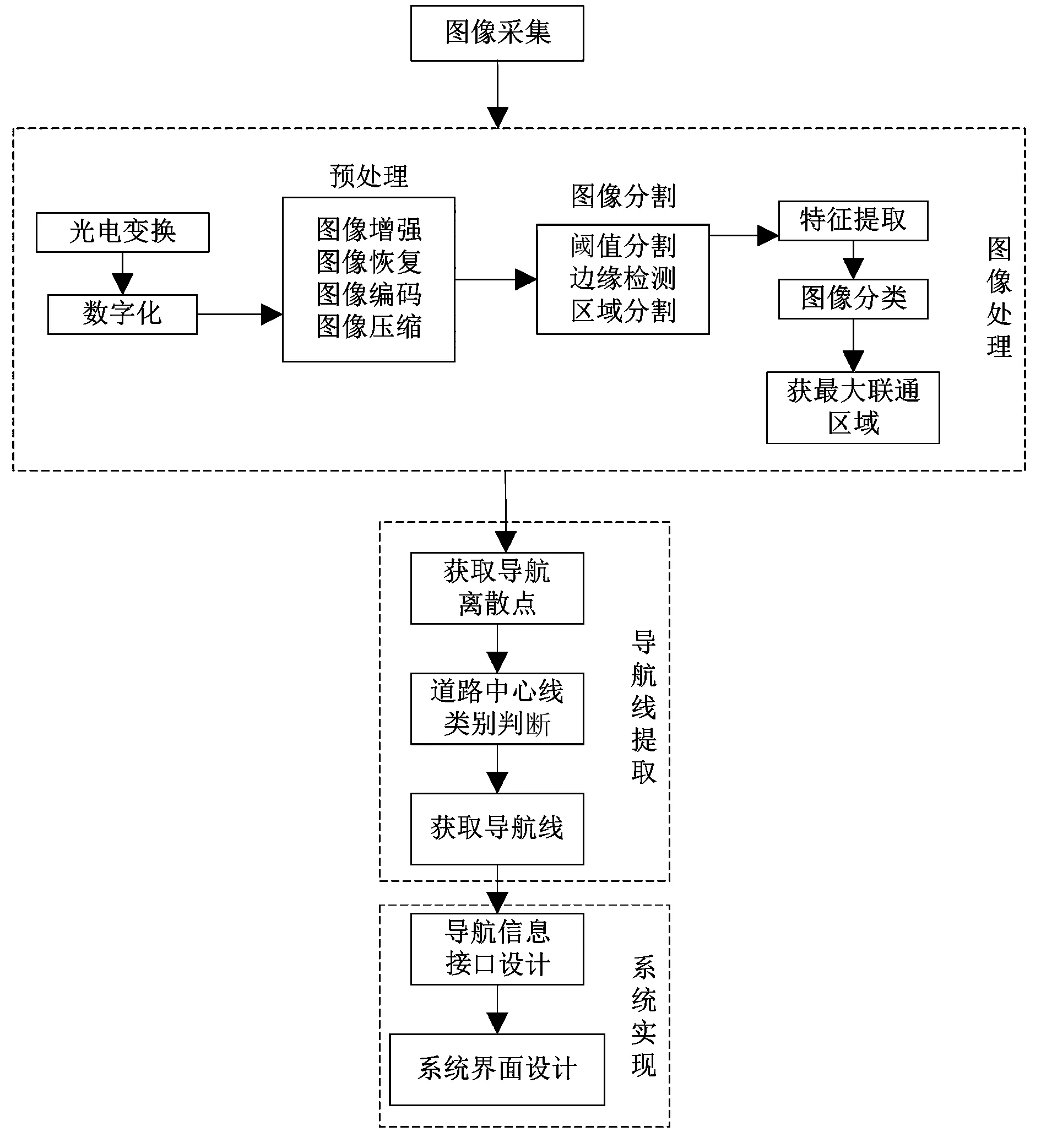
图4 视觉图像处理流程图Fig.4 The processing flow chart of visual image
首先,摄像头进行图像的采集,并将采集的图像存储在内存卡中;然后,利用MatLab软件调用相应的图像进行处理,确定待采摘区域和道路区域;最后,通过道路区域中心线的离散点确定导航路线,通过待采摘区域确定待采摘果实的采摘路线。
1.4 执行机构和检测系统
执行机构是采摘机器人完成果蔬采摘过程的实体,通过驱动传动装置提供运行的动力,由控制系统进行整个采摘过程的控制,直至任务完成。执行机构的主要组成部分包括行走机构、末端执行器、机械臂、机械臂搭载平台和控制系统控制盒等,如图5所示。
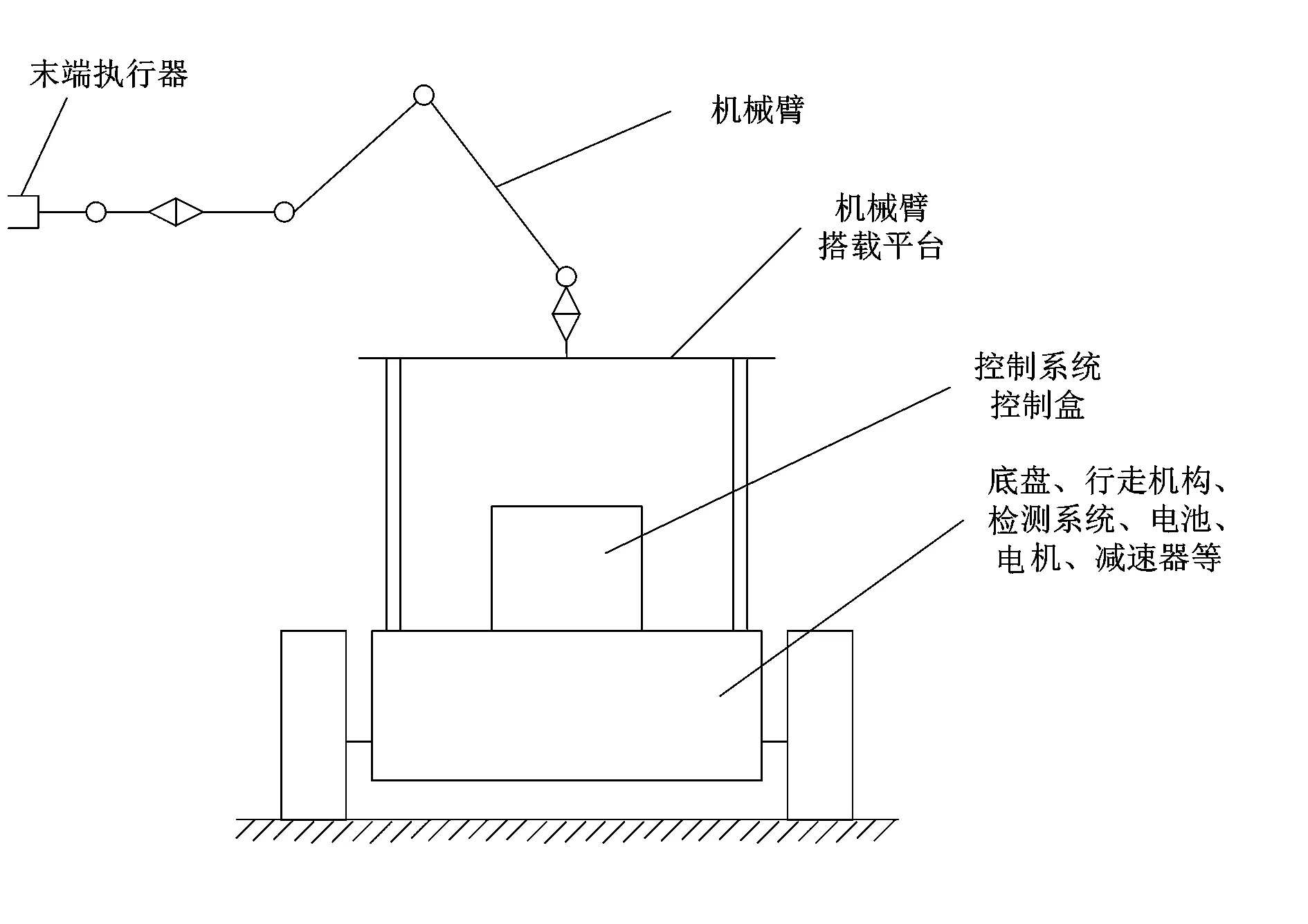
图5 执行机构结构简图Fig.5 The structure diagram of actuator
图5中,行走机构的作用是搭载机械臂和控制系统等设备,实现机器人的稳定前进。考虑到果蔬种植区域既有平原地带又有丘陵,为了使机器人在不同的环境均可实现平稳作业,行走机构采用履带式。
机器人的机械臂通过搭载平台固定于行走机构,另一端与末端执行器连接,作用是完成采摘果蔬时的大动作。为了防止机器人在采摘较低位置的果蔬时与果蔬发生碰撞,机械臂的搭载平台高度要求使机械臂能够达到果蔬的最低点,一般设置高度为1m。
末端执行器主要用于完成果蔬的抓取、切割和搬运,其精度直接关系到机器人的采摘成功率。为了进行果蔬的定位,在末端执行器上安装传感器元件及相关辅助装置,包括红外射线仪、气缸和气爪,以实现果蔬的灵活抓取。
2 采摘机器人结构优化
为了在产品的设计研发过程中能够实时考察产品的结构性能和几何合理性,在CAD软件中集成了CAE分析功能,包括静态和动态性能分析等[5]。采摘机器人中,对采摘效果起到决定作用的是机械臂和末端执行器,因此主要对这两个部分进行结构优化。
2.1 机械臂结构参数优化
机械臂的结构参数包括关节长度和旋转角度,这些结构参数决定了机器人的作业范围。根据作业要求和待采摘果蔬的分布空间,基于机械臂的作业范围,通过对机械臂的关节尺寸进行分析、计算,实现结构参数的优化。
机械臂为3个自由度的连杆系统,其变量包括机械臂搭载平台高度、大臂长度和旋转角度、小臂长度和旋转角度以及腰部回转角度。首先,确定机械臂的作业范围。以西红柿采摘为例,其株高范围一般为90~150cm,成熟果实的生长高度一般为70~90cm。结合机械臂的工作状态,以及果蔬与机械臂采摘时的相对位置,最终确认机械臂的工作范围为32cm×80cm。机械臂的作业位置示意图如图6所示。
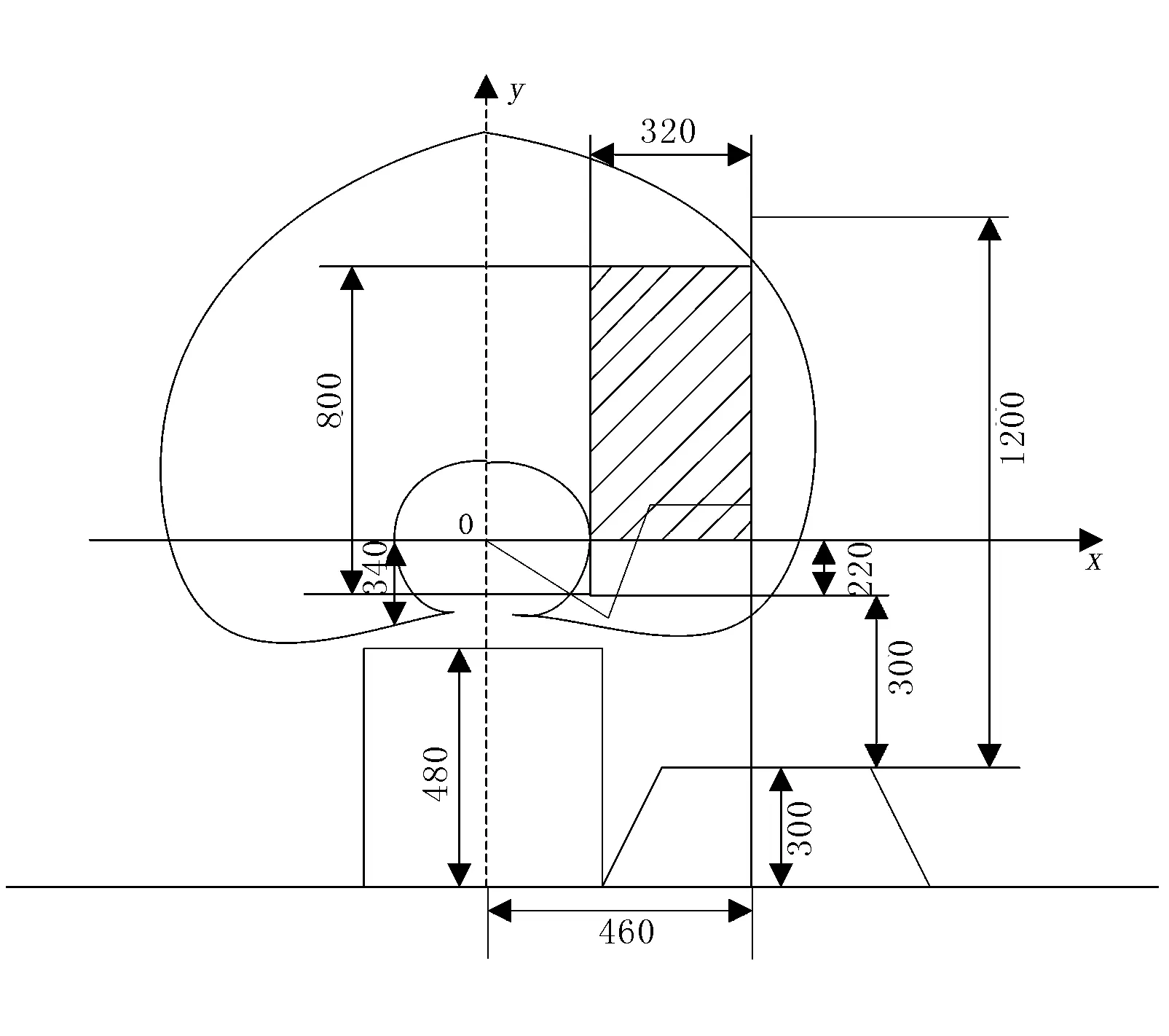
图6 机械臂作业位置示意图Fig.6 The operation position diagram of the maipulator
对于其他果蔬,可以根据果蔬的高度适时调整机械臂作业范围。同时,结合机械臂的现有尺寸结构,可以确定机械臂搭载平台高度为40cm,大臂和小臂转角分别为±90°和±150°,最终确定机械臂的可优化参数为大臂和小臂的长度。
为了使机械臂的结构紧凑,以机械臂所能到达的空间为目标函数,机械臂需要达到工作范围区域后的最小值应满足以下条件,即
其中,s1和s2分别为机械臂的大臂和小臂的长度。在实际作业过程中,还需要使其到达空间的范围小于实际的作业空间。通过对图6进行分析,可以确定机械臂的约束条件为
h1(x)=-s1≤0
h2(x)=-s2≤0
h4(x)=c2+d2-(s1+s2)2≤0
2.2 末端执行器参数控制优化
为了减小电机驱动的压力,末端执行器采用轻质合金。采摘时,可以忽略末端执行器的质量,其与果蔬的碰撞可以看作是弹簧阻尼模型。末端执行器抓取时的模型如图7所示。
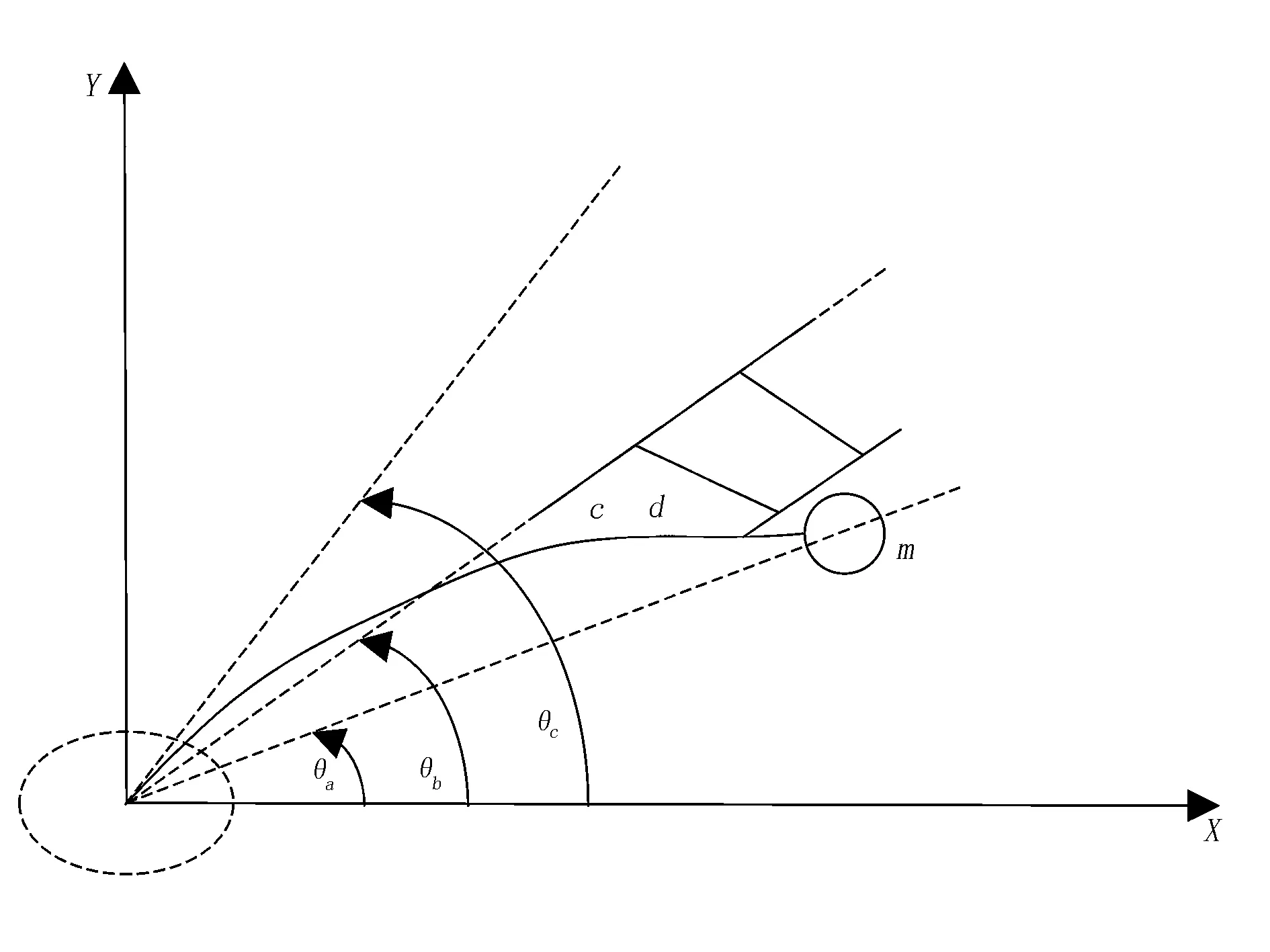
图7 末端执行器抓取模型Fig.7 The grab model of the end effector
图7中,末端执行器的质量为m,旋转时的刚度为c,未夹持果蔬时的顶端角为θa,刚触碰果蔬时的接触面角度为θb,夹持过程中的角度为θc。通过对模型进行分析,可以得出末端执行器在抓取果蔬时的动力学方程为
Δθa=θa-θb
该动力学方程加入了采摘果蔬时的力矩补偿、环境的刚度和阻尼运动。其中,be为环境的阻尼系数;ke为环境的刚度系数;θa、θb分别为采摘果蔬时的角速度和角加速度。
由于θb为常数,因此具有以下关系,即
此时的动力学方程可以表示为
式中第4项为恒值,可以将其看作扰动,去除该项。对该式进行拉式变换,可以得到采摘果蔬时力矩与转动角度之间的关系,即
一旦采摘时果蔬与末端执行器发生碰撞,则环境阻尼系数be和刚度系数ke较大,此时可以得到极限关系为
对上式转换得到末端执行器的整体模型,即
根据以上模型,采用PID控制器对力矩进行控制,系统模型如图8所示[6-7]。
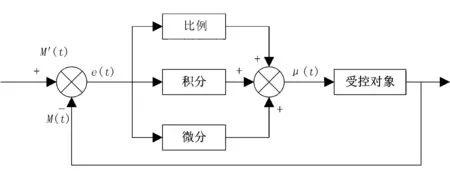
图8 末端执行器控制系统模型图Fig.8 The model diagram of end effector control system
3 试验结果
通过CAD/CAE技术,完成了采摘机器人的整体结构设计和零部件尺寸优化。为了验证其操作性能,还需要进行针对性的仿真试验。
采摘机器人的机械性能主要由制造精度、传动间隙、电机运动误差以及智能控制误差等共同决定。这些因素对于采摘机器人的作业精度影响最大,因此采用MatLab软件对机器人进行运动学正解试验测试。
试验设计时,启动软件,使机器人的末端执行器按照设定的坐标位置行进,测试末端执行器的实际坐标值与理论坐标值的误差,结果如表1所示。
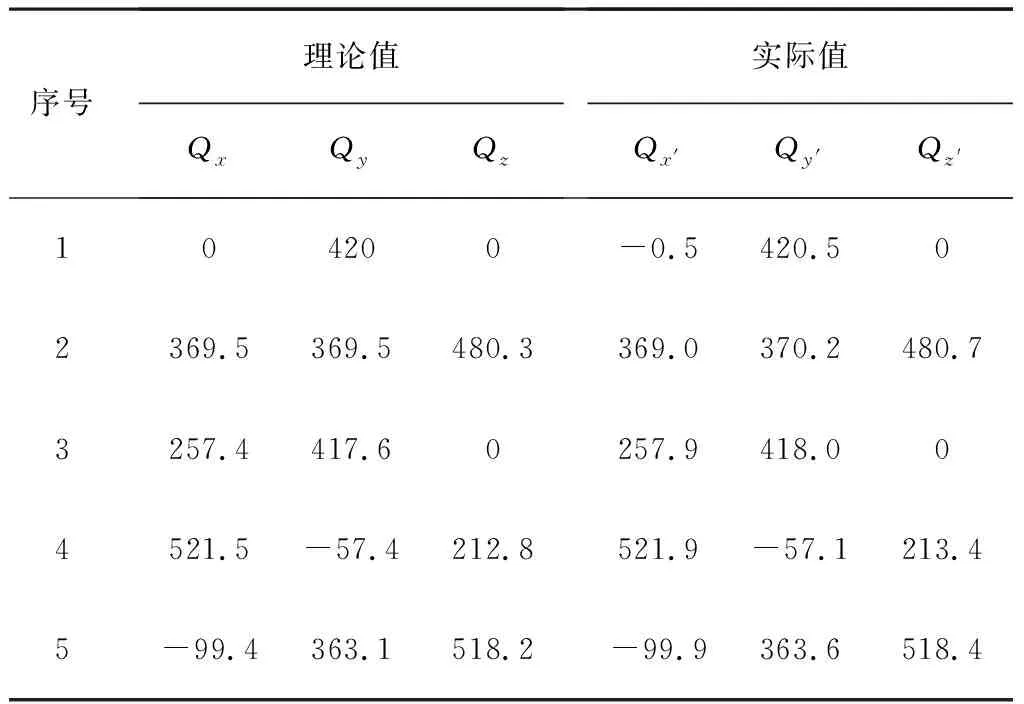
表1 运动学正解试验结果Table 1 The test result of positive kinematics solution mm
由表1可知:机器人运动学正解的误差均小于1.6mm,运动精度能够满足采摘机器人对于末端执行器采摘精度的要求,机器人结构设计合理。
4 结论
1)针对采摘机器人结构研发困难的问题,基于CAD/CAE技术对采摘机器人进行结构设计和仿真试验。该采摘机器人主要组成包括控制系统、智能系统、执行机构、驱动传动装置及检测系统等。
2)为了保证采摘机器人的结构性能和几何合理性,针对机械臂和末端执行器进行了结构参数优化,并确定了末端执行器的控制模型。
3)为了验证采摘机器人的操作性能,采用MatLab软件对其进行运动学正解试验测试,结果表明:机器人结构设计合理,可以满足采摘精度要求。
