智能草坪修剪机器人路径规划研究—基于模糊改进人工势场算法
2023-10-17王娜,石晨
王 娜,石 晨
(河南工业职业技术学院,河南 南阳 473000)
0 引言
路径规划是农业机器人研究领域的技术难点之一,其目的在于为机器人的作业过程寻找最优路径。路径规划的研究和应用可以解决机器人在复杂作业环境中的安全行驶难题。目前,研究机器人路径规划最常用的算法有粒子群、蚂蚁、遗传、神经网络、人工势场算法等。为此,将人工势场算法和模糊控制算法结合起来,实现了智能草坪修剪机器人的路径规划。
1 智能草坪修剪机器人环境模型
智能草坪修剪机器人路径规划首要条件是建立作业环境模型,在此基础上才能较好地确定时间短、路径短的最优路径。在此,采用栅格法对机器人作业环境建模,先利用栅格的极坐标和直角坐标进行变换,再将作业环境分成单位相同的栅格,若作业环境存在障碍物或者其他物体,则将该区域标记为障碍物栅格。
采用栅格法建立智能草坪修剪机器人作业环境模型的流程:①建立直角坐标系,如图1所示;不具体细分栅格,而是以障碍物的顶点确定障碍物的实际位置,如图2所示。②在作业过程中,智能草坪修剪机器人会实时判断是否会从障碍物穿过;若是,则判别会与障碍物发生碰撞。③为了实现机器人的路径规划,将每个障碍物的定点进行连线,在进行路径规划时,不允许规划路径穿过连线,确保不会发生碰撞行为。
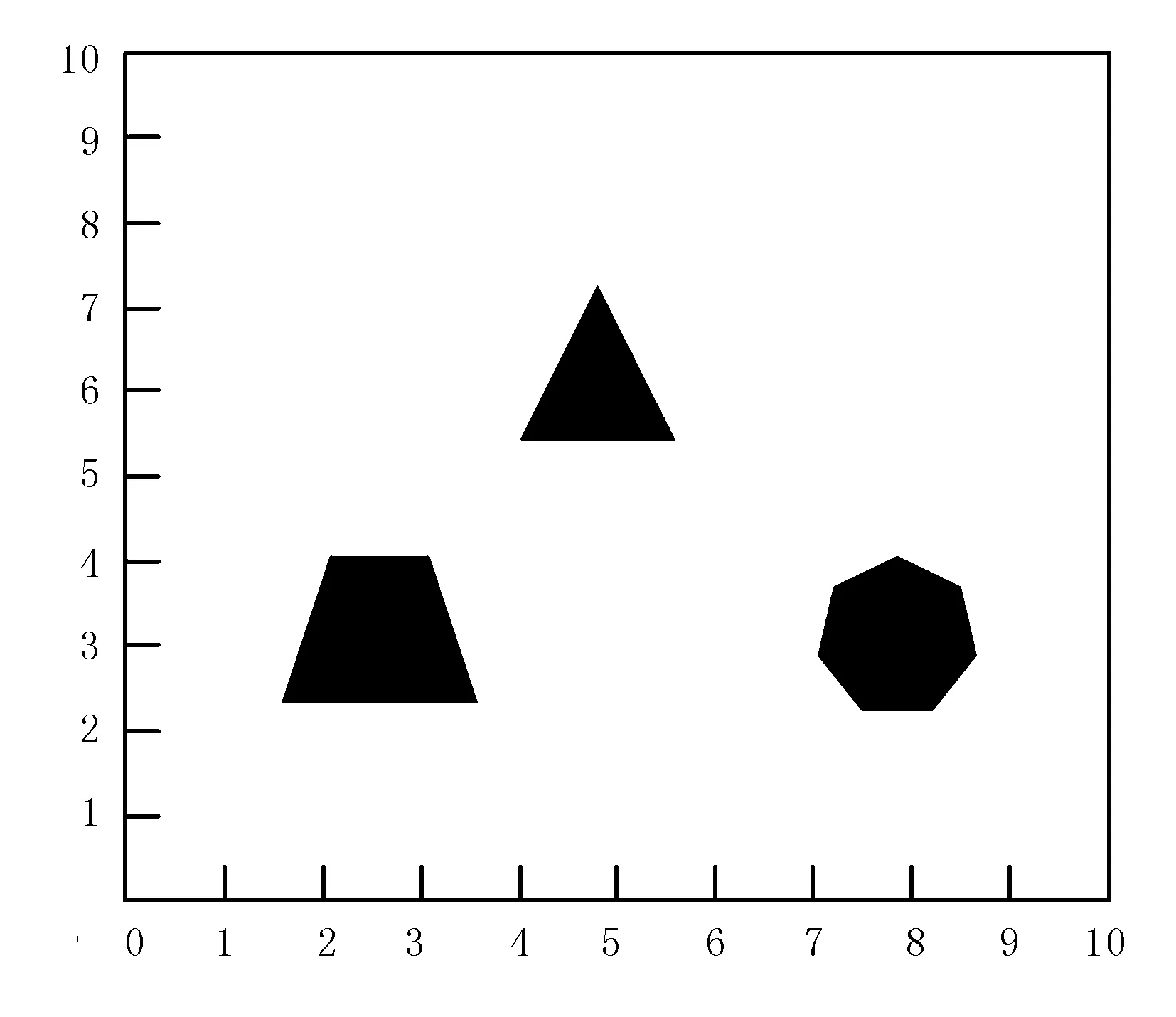
图1 智能草坪修剪机器人作业环境模型Fig.1 The working environment model of intelligent lawn mowing robot
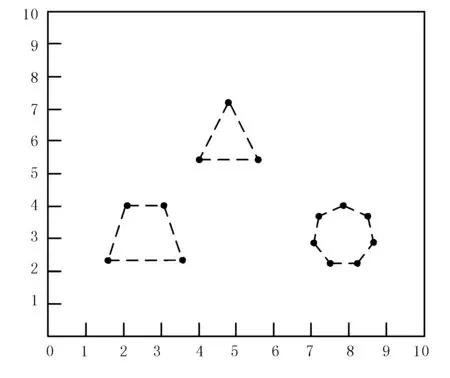
图2 障碍物简化示意图Fig.2 The brief sketch diagram of obstacles
采用图1、图2中栅格法表示障碍物,会延长智能草坪修剪机器人路径规划的时间,对机器人CPU性能要求也很高。因此,采用圆形域对不同形状的障碍物进行表示,简化智能草坪修剪机器人的计算。作业环境中,障碍物表示方法如图3所示。
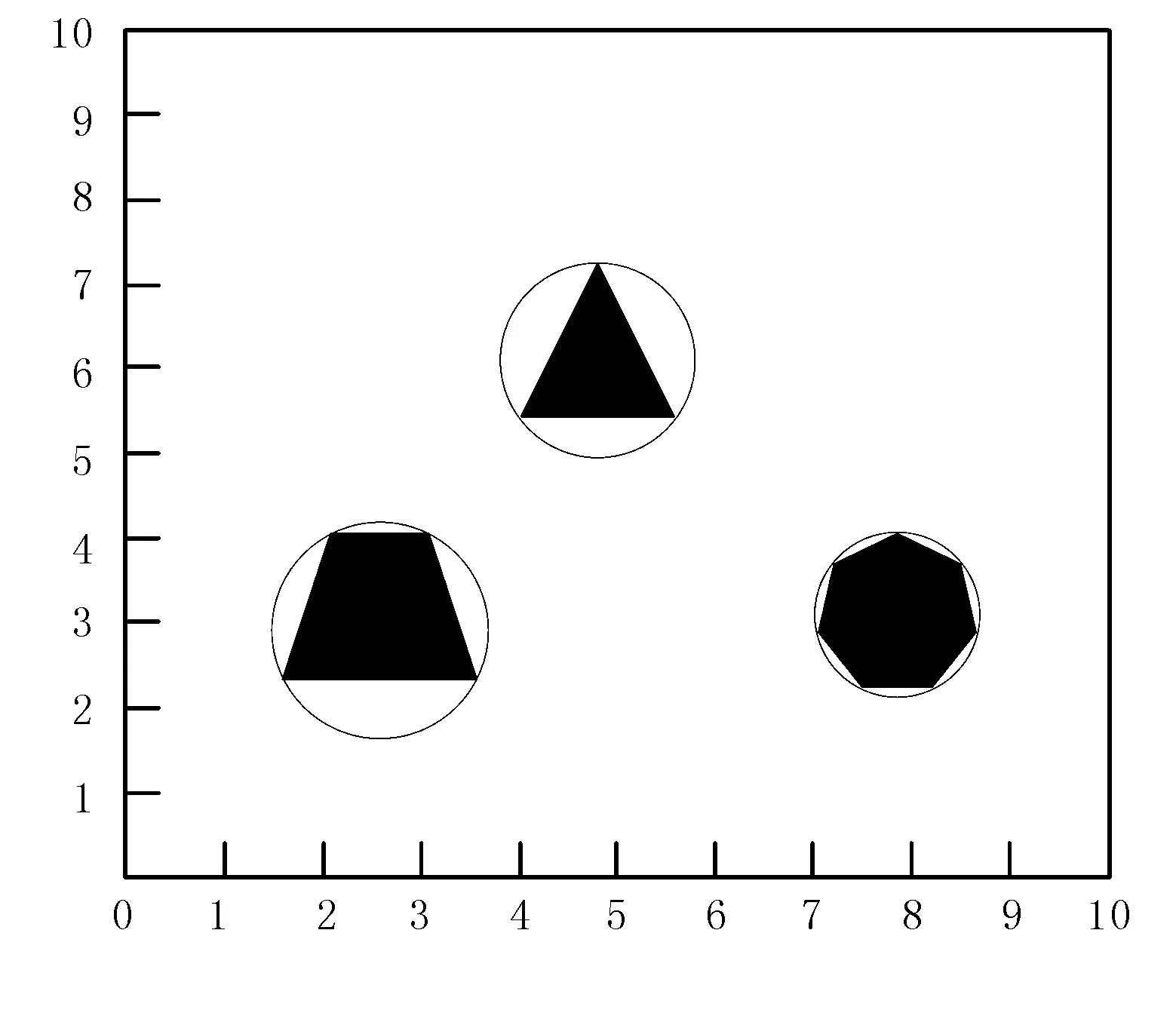
图3 作业环境中障碍物表示方法Fig.3 Obobstacle representation in working environment
2 模糊改进人工势场算法
2.1 人工势场算法
机器人的路径规划一般采用人为或者简单的算法进行,假设遇到作业环境复杂可能无法快速获得环境数据和计算出最优路径,会大大降低工作效率。因此,引入人工势场算法,根据机器人作业环境搭建势场模型。在该模型中,智能草坪修剪机器人和障碍物之间存在排斥力,同目标地存在吸引力,当智能草坪修剪机器人和障碍物之间的距离越近时,则排斥力越大。
采用人工势场对智能草坪修剪机器人进行路径规划,根据势函数的下降方向进行避障处理,再快速向目的地进行移动。本文在传统人工势场的基础上,引进了目标和智能草坪修剪机器人的欧几里得距离,其表达式为
(1)
其中,Urep(q)为人工引力势场;X为目标的欧几里德距离;Xg为智能草坪修剪机器人的欧几里德距离。
智能草坪修剪机器人和障碍物之间的斥力函数是负梯度,其方程式为
Frep(q)=-∇Urep{q)
(2)
然后,分别使用Frep1和Frep2对ρ(q,q0)进行求导计算,即
(3)
(4)
其中,Frep1和Frep2均为矢量;Frep1为从智能草坪修剪机器人指向障碍物的方向;Frep2为从智能草坪修剪机器人指向目标点的方向。智能草坪修剪机器人的受力示意如图4所示。
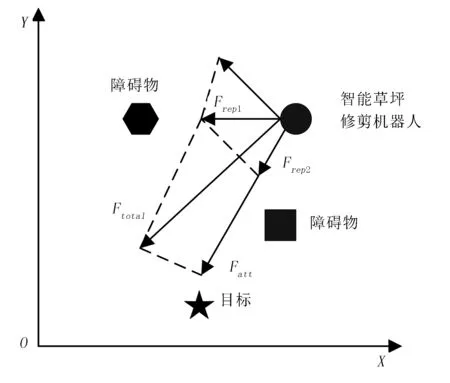
图4 草坪修剪机器人的受力示意图Fig.4 The force diagram of lawn mowing robot
2.2 基于模糊逻辑改进的人工势场算法
为了实现对草坪修剪机器人移动路径的精准优化,在人工势场算法的基础上引入了模糊逻辑控制方法。该算法在人工势能获取草坪修剪机器人期望的运动速度和期望的方向、当前的运动速度vs和运动方向as的变差量ea和ev。基于模糊逻辑改进人工势场算法的草坪修剪机器人运动原理如图5所示。
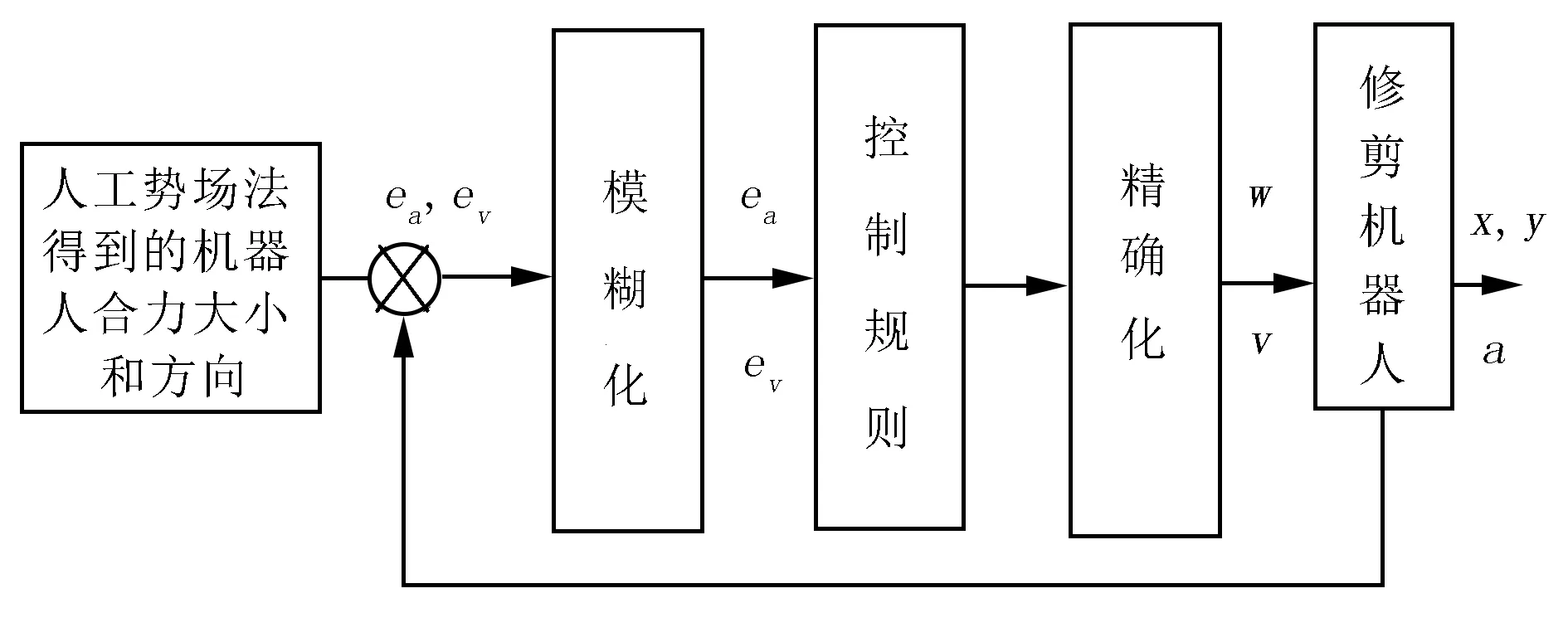
图5 基于模糊逻辑改进人工势场算法的运动原理图Fig.5 The motion schematic diagram of improved artificial potential field algorithm based on fuzzy logic
在得到速度和运动的方向之后,可以采用模糊控制技术对其进行模糊化。本文在研究过程中,将速度和方向偏差值模糊化为大、中、小、中正、大正等几种偏差,分别采用BNZ、MNZ、SZ、MPZ和BPZ等。速度和方向偏差的隶属函数分布分别如图6和图7所示。
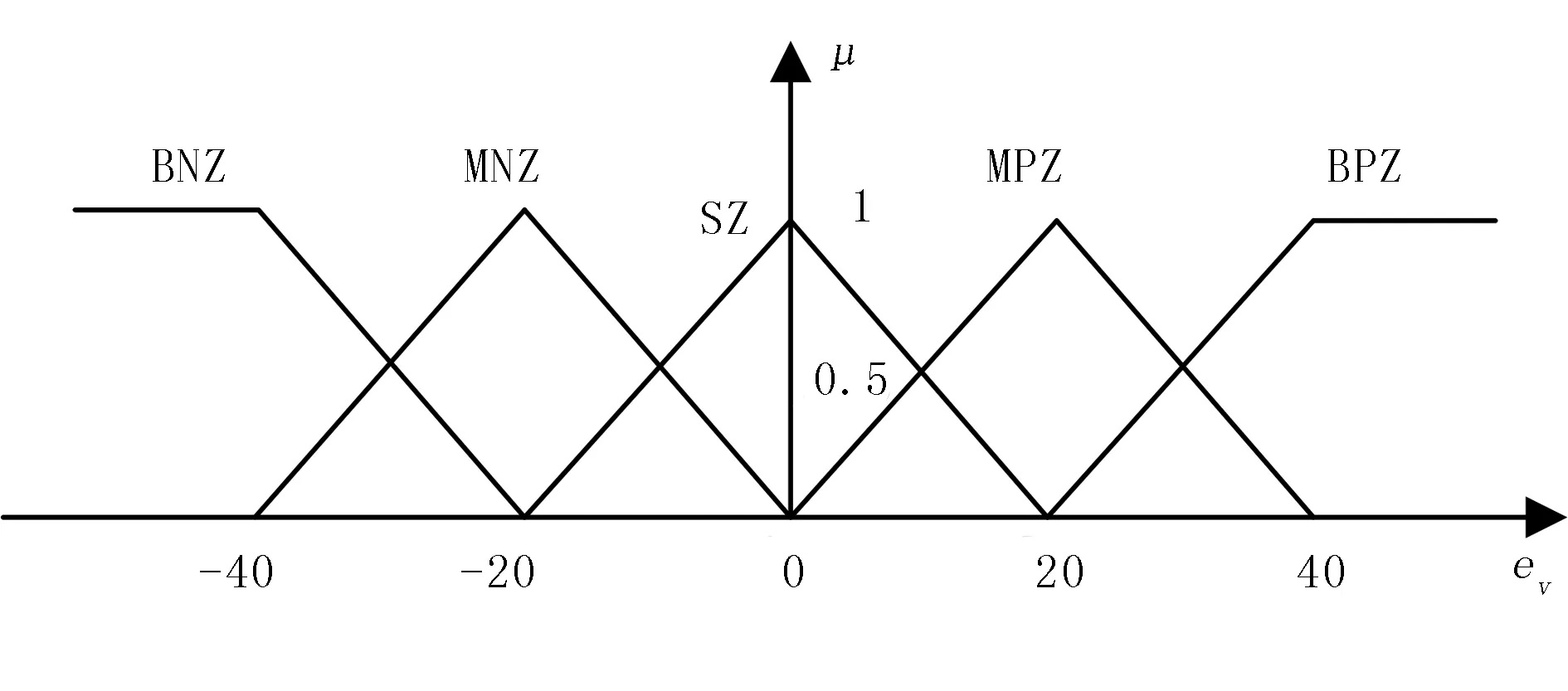
图6 速度的隶属函数分布示意图Fig.6 The distribution diagram of membership function of velocity
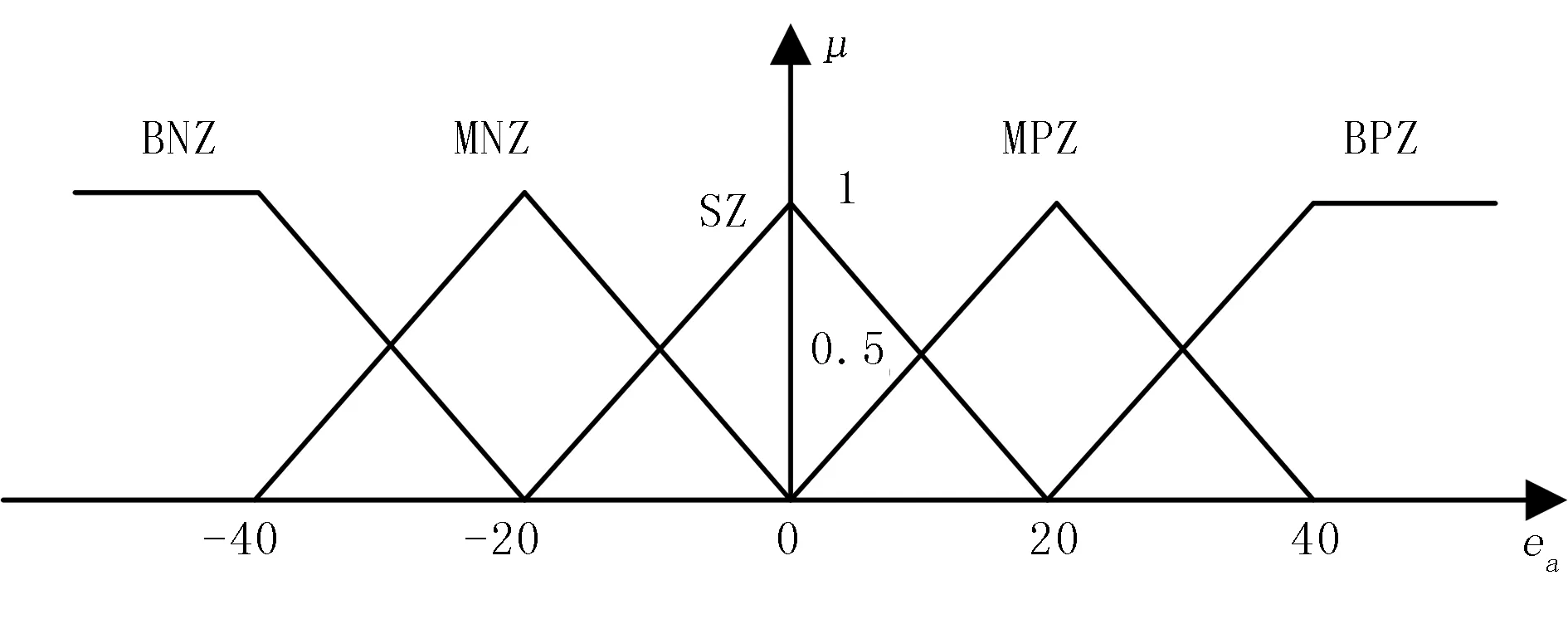
图7 方向偏差的隶属函数分布示意图Fig.7 The distribution diagram of membership function of direction deviation
为了实现速度和方向的快速控制,将得到的控制量设置为增量模式,即控制系统对控制量采用增量方式进行模糊化,对论域里设置大负、中负、小、中正和大正等增量,分别对应BNS、MNS、SS、MPS、BPS。速度和方向偏差增量的隶属函数分布分别如图8和图9所示。
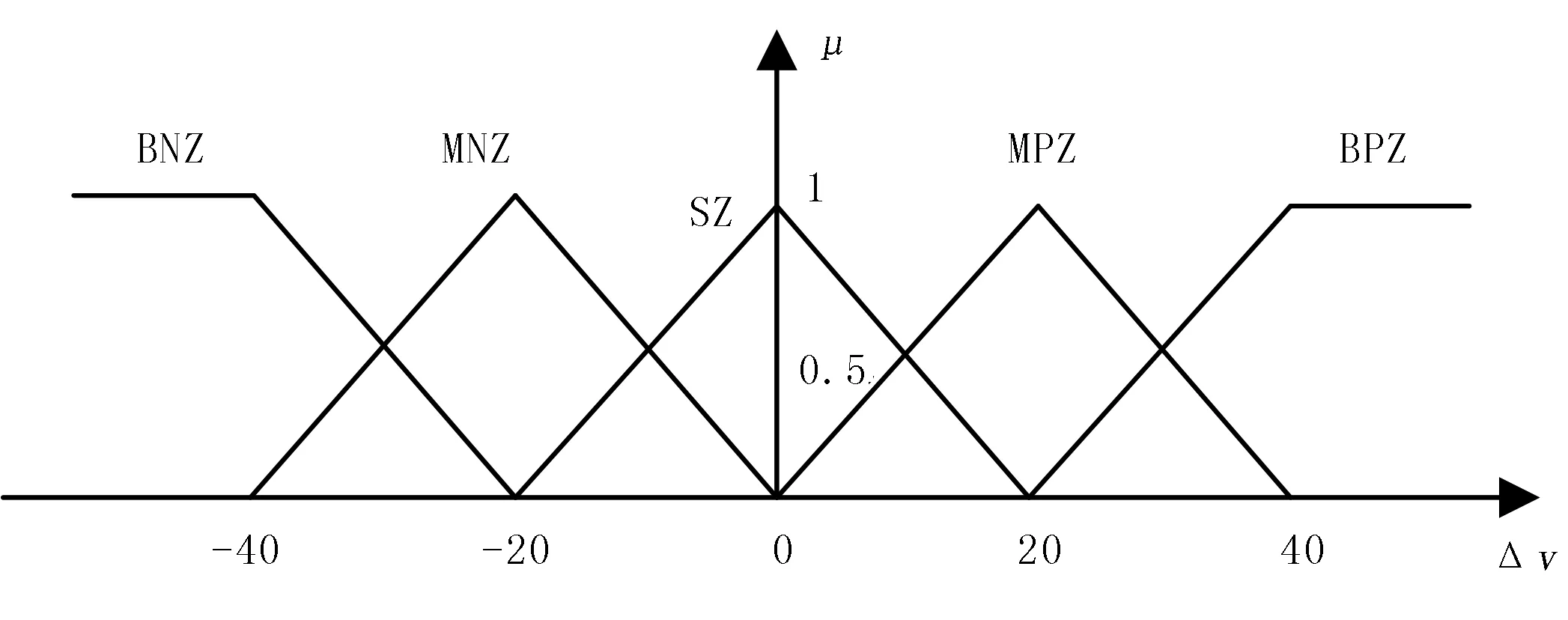
图8 速度偏差增量的隶属函数分布图Fig.8 The distribution diagram of membership function of speed deviation increment
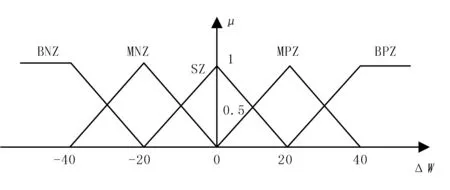
图9 方向偏差增量的隶属函数分布图Fig.9 The distribution diagram of membership function of direction deviation increment
模糊控制的规则设定经过数次的实验测试后才能得到,根据经验可以设置草坪修剪机器人速度和角速度的控制增量。通过模糊化和制定规则后,在控制规则的作用下,可以将得到的控制量采用重心法计算出控制量增量(Δv和Δw)的准确值。这样,可以根据以下表达式计算出草坪修剪机器人在人工势能场的虚拟合力,并转换成草坪修剪机器人的控制指令v(k|+1)和w(k|+1),即
(5)
3 基于模糊改进人工势场算法的路径规划算法
草坪修剪机器人路径规划采用多边形工作区域的模式,自主行走都是采用直线模式,割草机器人通过GPS传感器获取工作区域边界坐标信息 ,以及多边形区域的边界定点和直线方程表达式。为了简化计算量,以多边形的第1个点为该工作区域的坐标原点,第1个点和第2个点之间的连线为y′轴,其与平面坐标系的转换方式如图10所示。
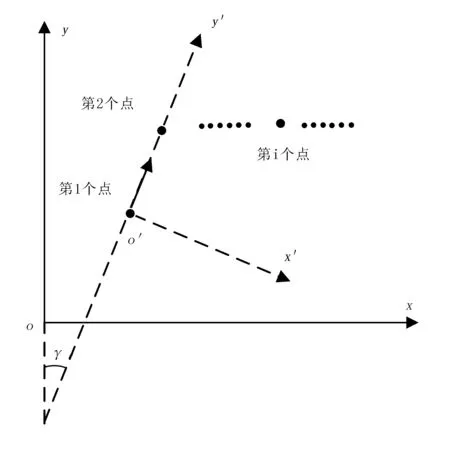
图10 多边形工作区域坐标转换图Fig.10 The coordinate transformation diagram of polygon working area

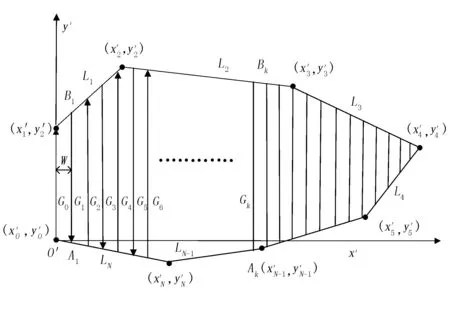
图11 草坪修剪机器人多边形作业区域示意图Fig.11 The schematic diagram of polygon working area of lawn mowing robot
根据多边形各个顶点在区域坐标系中的坐标求取边界线Lj(j=0,1,...,N),在多变行作业区域的直线方程分为以下两种:
1)如果j≤N-1,那么其直线方程表达式为
(6)
2)如果j≤N-1,那么其直线方程表达式为
(7)
首先,确定直线Gk在区域内的方程表达式为x′=kW,W为草坪修剪机器人割台宽度;然后,结合式(6)和式(7),求出Gk和边界线Lj的交叉点,计算出坐标后,根据图12流程图对草坪修剪机器人工作区域进行路径规划。
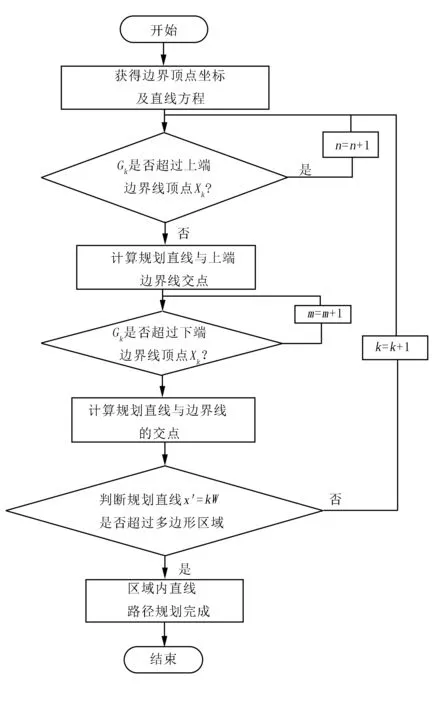
图12 草坪修剪机器人路径规划流程图Fig.12 The path planning flow chart of lawn mowing robot
4 仿真实验
为了检验基于模糊改进人工势场算法的智能草坪修剪机器人路径规划系统的准确性和有效性,本文采用MatLab对智能草坪修剪机器人在避障和路径规划过程中遇到的问题进行了模拟和仿真。仿真过程中,机器人作业区域是一个四边形,作业区域内有两个黑色障碍物。MatLab仿真结果如图13所示。
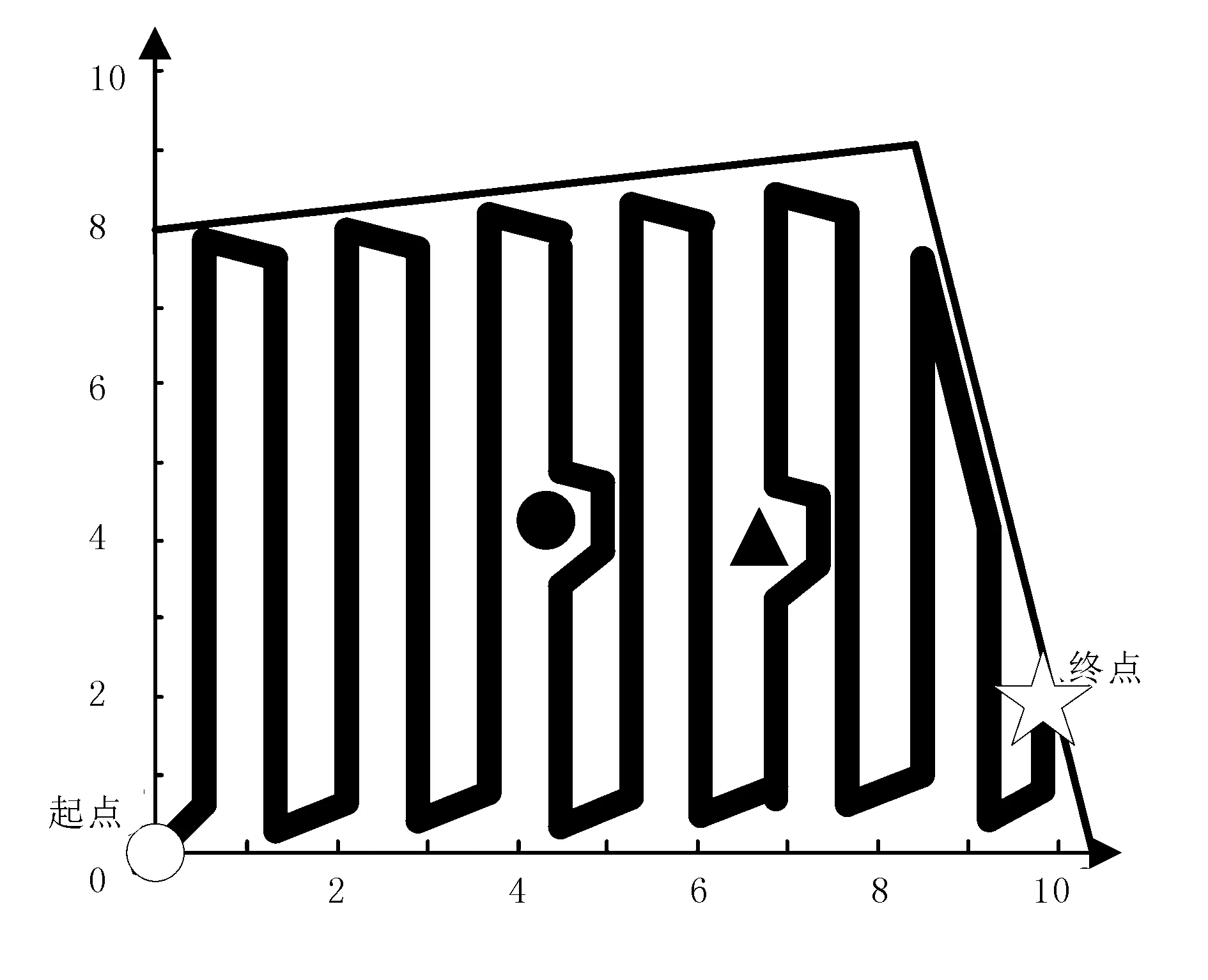
图13 MatLab仿真结果图Fig.13 The simulation results by MatLab
由图13可以看出:模糊改进人工势场算法可以实时、有效地控制智能草坪修剪机器人及时避开障碍物,准确从起点开始修剪草坪作业,并作业至目标终点,规划的路径也比较平滑,证实了算法的有效性和可行性。
5 结论
为了实现智能草坪修剪机器人的自主避障和路径规划,对人工势场算法的势场函数进行了升级改进,同时引入了模糊控制算法,将机器人的速度和方向偏差进行模糊化,实现了该机器人的避障路径规划。MatLab仿真实验表明:模糊改进人工势场算法可以实时、有效地控制智能草坪修剪机器人及时避开障碍物,准确从起点开始修剪草坪作业,并作业至目标终点,规划的路径比较平滑,证实了算法的有效性和可行性。
