柔性蒙皮变体机翼多电机分布式驱动系统研究
2023-10-16随涛徐志伟
随涛,徐志伟
(南京航空航天大学 机械结构力学与控制国家重点实验室,南京 210016)
变体机翼是一种能够根据飞机飞行条件和任务需求,其构型能够进行实时改变,从而获得最优气动性能的新型机翼;可分为大尺度机翼变形、中等尺度变形和局部小变形[1],而机翼前后缘结构的连续上下偏转变形是其中的一种重要的变形形式。
机翼变形过程中,驱动方式主要包括传统的电机驱动、液压驱动、气压驱动等,而采用智能材料,比如:形状记忆合金、压电材料、磁流变和电流变等作为驱动器也是近几年的研究重点[2]。智能材料驱动器各有优缺点,但普遍技术不够成熟,可靠性比较低,目前还处于实验研究阶段,并未得到大量的应用[3-5];常规的驱动形式,经过很多年的实践和应用,一般都比较稳定可靠,但也存在一定的缺点,如:重量和体积大等[6];从目前的研究和实际应用来看,电机驱动技术具有精度高、响应快、稳定可靠等优点,是当前变体飞行器中的重要的驱动方式之一,因此本文的可连续偏转机翼后缘结构采用了电机驱动技术,考虑到驱动功率的实际需求和设计空间的限制,采用了多电机分布式驱动方式。
在多电机分布式驱动系统中,协调控制始终是电机控制上的关键难题[7]。早期多电机同步控制方式主要包括:并行控制、主从控制、串联控制等[8-9],但此类同步控制方式精度较低,且有一定的缺陷,如:主从控制中,主电机受到干扰时,从电机可以对此响应;但是,主电机不会对从电机受到的干扰做出响应。20 世纪80 年代,Koren 等[10]提出交叉耦合控制,将电机数据耦合,解决了早期控制存在的缺陷,为后续研究提供了新思路。随后,Perez-Pinal 等[11]学者提出偏差耦合同步控制,该控制方法适用于任意数量电机的同步。2002 年,Shih 等[12]设计出相邻交叉耦合控制器,优化了耦合算法。张承慧等[13]学者基于最小相关轴数目思想,提出相邻耦合控制算法,并利用Barbalat 定理证明了该算法的收敛性和稳定性。随着对控制响应速度要求的提高,国内学者们对耦合补偿器的优化设计展开了研究,将PI 控制、模糊PID 及人工神经网络等[14-19]各种算法运用到了补偿器的设计中。
本文针对采用柔性蒙皮的全尺寸可连续偏转后缘结构模型,选用3 台交流伺服电机,采用蜗轮-蜗杆和齿轮传动减速机构,驱动机翼后缘实现连续偏转;采用基于偏差耦合的同步控制算法,对机翼后缘的偏转角度进行了精确的控制,完成了地面加载实验和低速风洞载荷实验,获得了很高的控制精度,验证了所设计驱动系统和控制方法的可行性。
1 采用柔性波纹蒙皮的可连续偏转机翼后缘结构模型设计
针对某柔性后缘机翼翼型,后缘结构要求能够连续光滑向下偏转0~15°,全尺寸模型展长1.49 m、后缘弦长0.6 m;为了实现后缘与固定段的连续过渡,采用了纤维和骨架增强橡胶复合材料,根据偏转过程中后缘舵面不同位置处形变量和气动载荷的要求,对波纹蒙皮的厚度、变形量、承载力等参变量进行了综合优化设计和仿真分析,使得蒙皮可以同时满足弹性变形和气动承载的要求。设计完成后,采用模具整体成型制备工艺方法实现蒙皮的制备,并通过压条将蒙皮与后缘结构相连,如图1 所示。
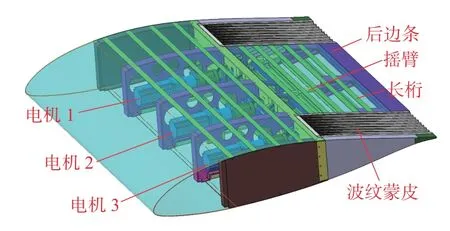
图1 多电机驱动后缘结构模型Fig.1 The model of trailing edge structure driven by multiple motors
采用电机驱动技术,设计了电机减速器-蜗轮蜗杆减速器-齿轮对减速器三级减速机构,三级减速机构减速比分别为:8∶1、70∶1 和6∶1,总减速比3 360∶1。后缘偏转过程中,主要的载荷包括柔性蒙皮弹性变形和外部气动载荷,当然还要考虑各种减速机构的摩擦和传递效率带来的损失。采用单台电机驱动,则需要大功率电机,使得体积增大,后缘及前面的舱段无法容纳这么大尺寸的电机,综合考虑后采用了3 台功率较小的交流伺服电机(750 W/台)驱动后缘结构的偏转,如图1 所示。
电机经过三级传动机构将扭矩传递到摇臂结构,摇臂结构通过后边条及长桁条带动后缘向下偏转。为保证偏转时蒙皮协调变形,3 台电机必须同步偏转,设计要求连杆结构角度偏差小于0.5°。传动轴上安装有角度传感器,可实时获取后缘的偏转角度。
3 台电机驱动的波纹柔性蒙皮机翼后缘,具有展长大、减速比高、展向气动载荷分布不同且实时变化、柔性蒙皮变形驱动力矩大等特点,若采用速度同步控制,电机速度差异产生的累积角度差可能导致后缘结构偏转的扭转损伤。因此,本文采用了角度同步控制的方法,确保后缘变形的协调性。
2 三电机偏差耦合同步控制策略
目前多电机同步控制策略有很多种,主要包括:并行控制、主从控制、虚拟总轴控制、交叉耦合控制和偏差耦合控制等,其中偏差耦合控制是基于交叉耦合控制的一种衍生控制方法,对于多台电机的同步控制精度更高。
偏差耦合控制的主要思想是根据各电机实时数据,动态调整每台电机的输入信号,使系统达到目标控制效果。对于3 台电机组成的驱动系统中的任意一台电机,如电机1,其跟随误差定义为
电机1 与其他电机的角度同步误差可定义为:
式中:ω*为电机目标转动速度;ωn与 θn分 别为第n台电机的转动速度和角度数据,n=1,2,3。各电机之间保持同步,需要使e1(t)、ε12(t)和 ε13(t)快速稳定收敛至接近于零。偏差耦合控制原理如图2,各电机的输入信号由参考速度 ω*、输出速度 ωn及速度补偿器输出 ωrn三者共同决定,其中TL为电机受到的扰动扭矩。
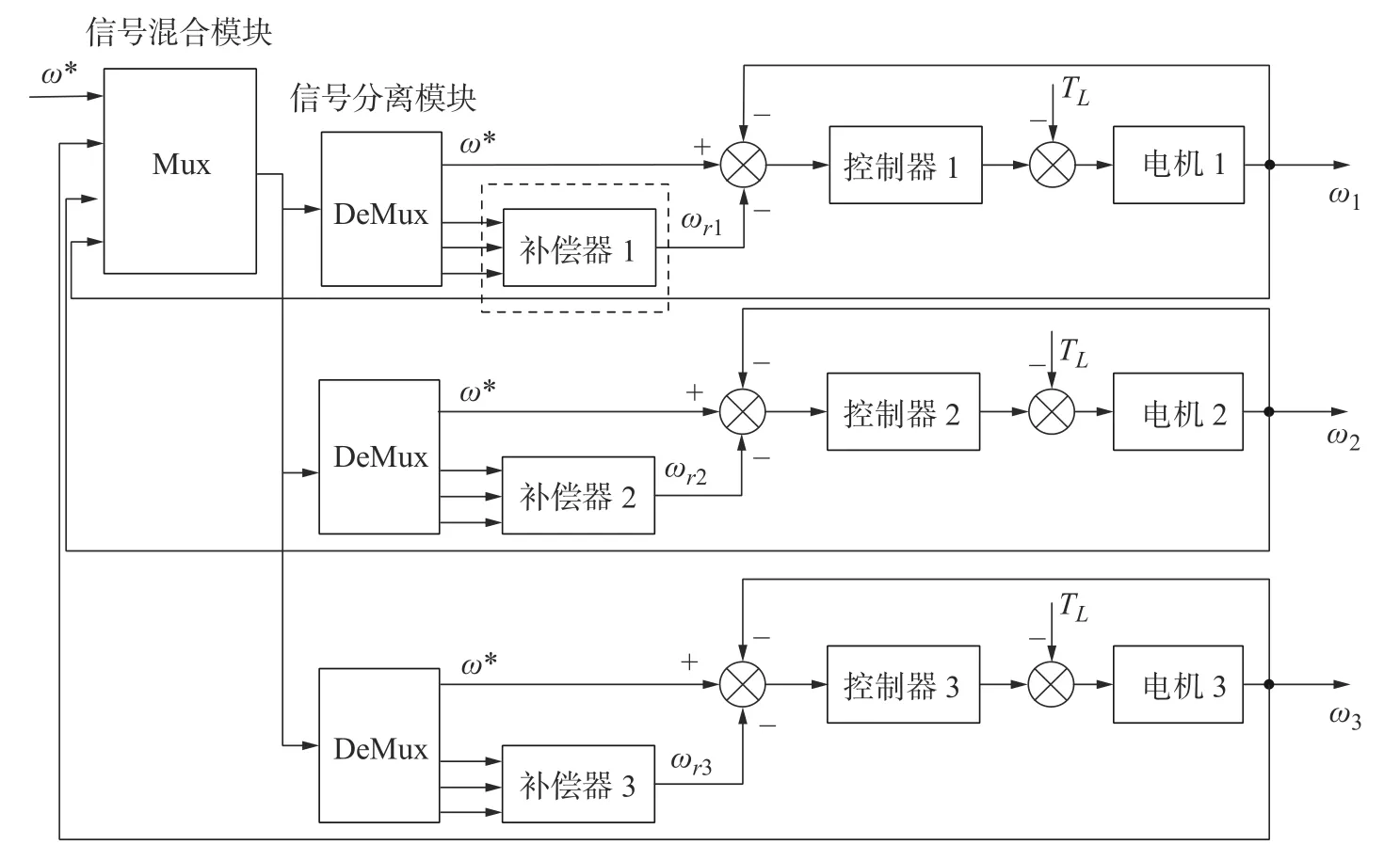
图2 偏差耦合同步控制系统框图Fig.2 Diagram of the deviation-coupled synchronous control system
本文中3 台电机采用同型号松下交流伺服电机及配套的控制器,内部为三闭环控制系统,从内到外依次为电流环、速度环和位置环。因电机系统输入输出均为速度信号,经过多次系统辨识参数调整,确定由电机与控制器组成的电机系统可按惯性环节处理。各电机辨识得到的传递函数G(s)n(n=1,2,3)为:
由式(4)~式(6)可知,3 台同型号电机的速度响应也略有差异。
控制系统的补偿器用于调整电机输入信号,实现电机同步,其内部对各电机数据进行耦合处理。补偿器的设计对控制系统性能起着关键性作用。本文分别设计了两种不同结构的补偿器,如图3 和图4 所示。
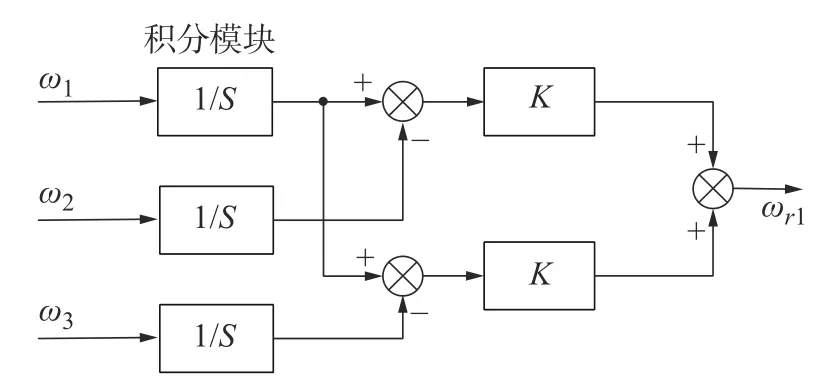
图3 采用固定补偿系数的补偿器1Fig.3 Compensator 1 with fixed compensation coefficient
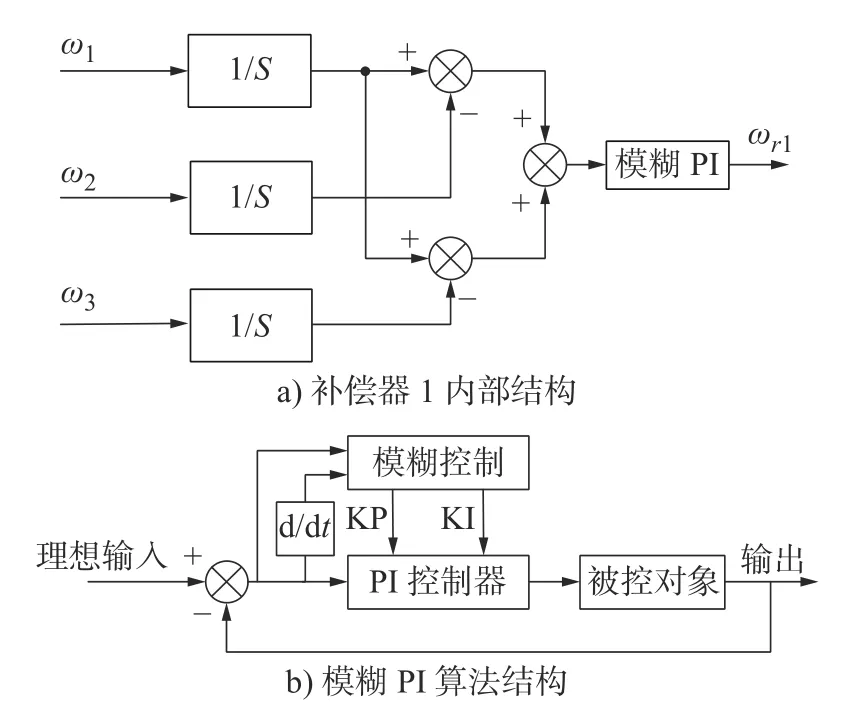
图4 采用模糊PI 的补偿器1Fig.4 Compensator 1 with fuzzy PI control
图3 和图4 分别为采用了固定补偿系数和模糊PI 的补偿器结构。补偿器首先获得电机的实际转动角度,进一步得到电机1 相对于电机2 和3 的角度同步误差,利用补偿系数或模糊PI 控制器进行补偿修正得到电机的1 的补偿信号 ωr1。通过多次仿真和实验分别确定了合适的补偿系数(K13=K12=5)和模糊参数,并利用Simulink 对系统进行仿真分析。仿真时设定3 台电机转速为1 000 r/min,0 s时刻同时启动,3 s 时刻为电机1 施加20°的瞬时角度扰动,仿真结果如图5。
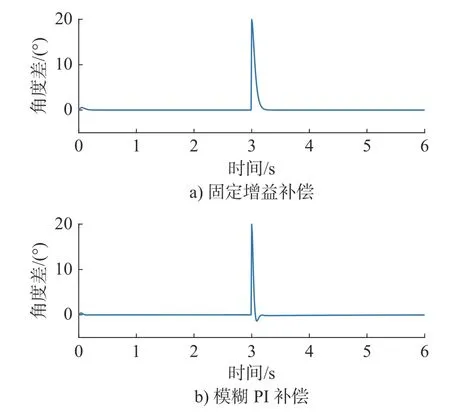
图5 补偿器对同步性能的影响Fig.5 The influence of the compensator on synchronization performance
分析仿真结果可知,采用模糊PI 算法的补偿器控制效果更优:电机启动阶段的角度差较低;控制系统对仿真施加的20°角度干扰有更快的响应速度。但复杂的控制算法将大大增加系统软硬件设计的难度,同时降低控制系统的实时性。综合考虑最终选择采用固定补偿系数的补偿器。
3 测控系统软硬件的设计和实现
3.1 系统硬件结构
测控系统硬件采用NI(National instrument)公司的数据采集卡,实现与电机驱动器以及角度传感器之间的信号交互,系统原理框图如图6 所示。
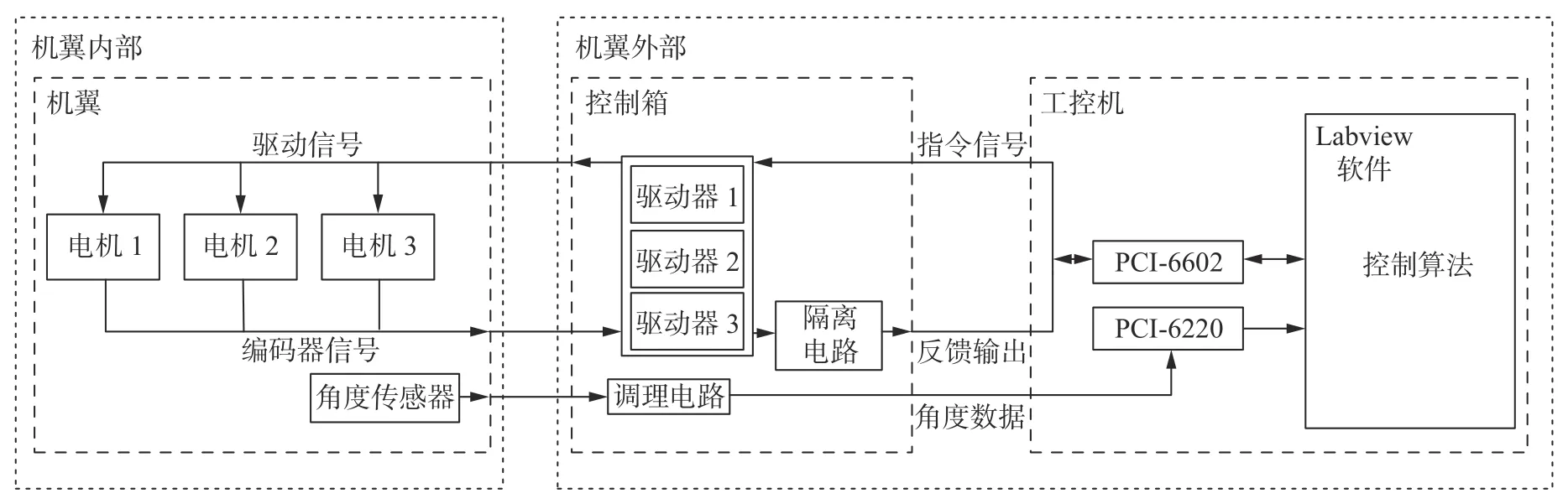
图6 控制系统框图Fig.6 Control system diagram
因机翼内部空间有限,电机控制器和控制系统布置在机翼的外部。电机驱动器、开关电源、各种调理电路等集中布置在控制箱中,数据采集卡配置在工控机中,软件采用LabVIEW 编程,控制系统如图7 所示。

图7 风动外控制系统实物图Fig.7 Physical diagram of the wind-driven external control system
系统中数据采集卡的具体参数如表1 所示。
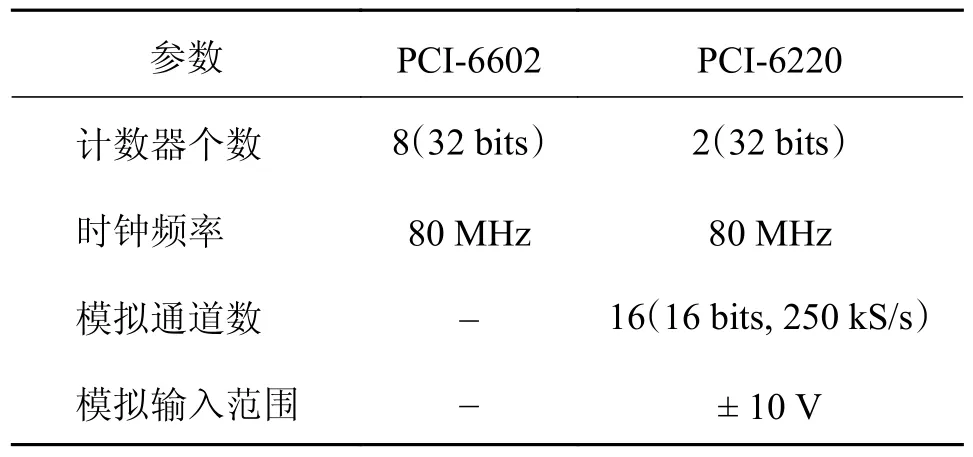
表1 数据采集卡参数Tab.1 Data acquisition card parameters
电机功率400 W,额定转矩1.27 Nm,最高转速3 000 r/min,采用位置控制模式;电机编码器为2 500线相对编码器,输出信号最高频率125 kHz。为减小电磁干扰的影响,设计了一阶无源RC 滤波电路,截止频率159 kHz;编码器信号经过滤波器和光电耦合隔离后输入数据采集卡PCI-6602。
角度传感器采用霍尔型传感器,具体参数:测量范围0~ 180°、测量精度小于等于0.3°、响应时间600 μs、输出4~20 mA 电流信号,其输出电流大小与输入角度呈线性关系。传感器信号通过相应的电流-电压转换电路,从模拟信号通道输入数据采集卡PCI-6220。
3.2 测控系统软件设计
控制系统软件选用LabVIEW 软件,系统流程图如图8 所示。
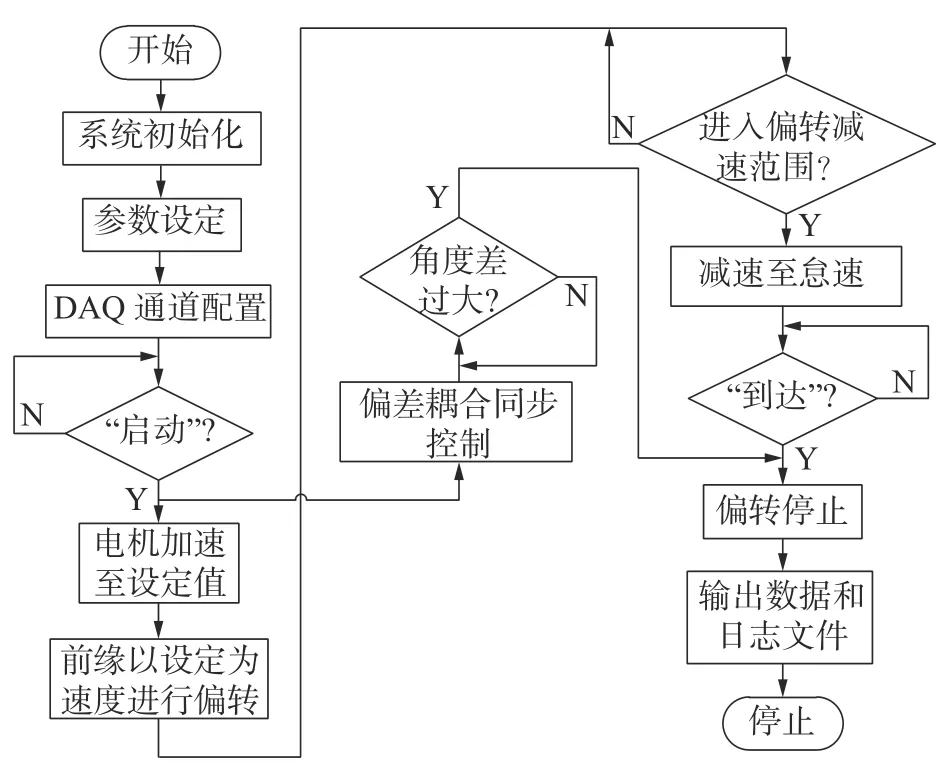
图8 测控过程软件流程图Fig.8 Software flowchart for the measurement and control process
首先进行系统初始化,对DAQ 设备的I/O 通道进行配置,并定义后缘减速临界角度范围,即
式中v*为后缘的设定偏转速度,°/s。
系统“启动”后,电机经过加速阶段加速至目标转速v*,随后保持匀速转动,当后缘偏转至与设定角度差小于 θ*时,电机进入减速阶段,直至停止;偏差耦合同步控制作用于电机运行全过程,保证电机间的同步性;同时,设定电机之间转动角度差大于30°时,电机被立即强行停止以保护后缘结构。
4 机翼后缘结构偏转实验验证
4.1 电机空载同步实验
为验证多电机转动角度的同步性,首先在空载情况下对控制系统进行实验测试。该实验包括两部分:1)空载无干扰情况下,测试电机以不同转速运行时的同步效果;2)空载有干扰情况下,测试电机以设定转速956 r/min 运行时的同步效果。
首先将电机固定于工作台上,当转速分别为:500 r/min、1 000 r/min、2 000 r/min 和3 000 r/min时,3 台电机的同步测试结果如表2 所示。由于3 台电机响应速度稍有不同,当指令脉冲信号到达时,电机无法同步转动,会导致启动阶段电机之间存在较大的角度偏差。
实验结果表明:电机启动阶段最大角度差随设定转速提高而增大,而匀速运行阶段各电机的最大角度差稳定在0.4°~0.6°,与转速无直接关联。
设定电机转速为956 r/min,通过实验验证控制系统的同步控制效果。图9 所示为系统运行过程中电机的实时角度差测试数据:空载启动阶段产生的最大角度偏差为0.7°,电机运行至0.5 s 时,电机角度差降低至0.5°,之后电机角度差始终保持在0.5°以内;在2 s 时电机已经处于设定转速的匀速运行阶段,此时在软件中对电机2 施加5°角度滞后偏差,在之后的0.5 s 内该角度偏差被成功消除;此后电机之间保持角度偏差不超过0.5°。该实验验证了空载情况下控制系统可以实现三电机之间的角度同步,电机高速运转时角度偏差不超过0.5°。

图9 空载电机同步实验曲线Fig.9 The synchronization experiment curve of the unloaded motor
4.2 地面载荷机翼后缘偏转实验
将电机安装于机翼中,实验模型如图10 所示。设定电机最大转速956 r/min,根据减速比可知后缘偏转速率为1.7 °/s。对后缘翼面施加等效的分布载荷,并在软件控制界面依次发送如下的指令:1)下偏至9°;2)下偏至12°;3)下偏至15°;4)上偏回0 初始位置。柔性后缘偏转变形效果如图11 所示。
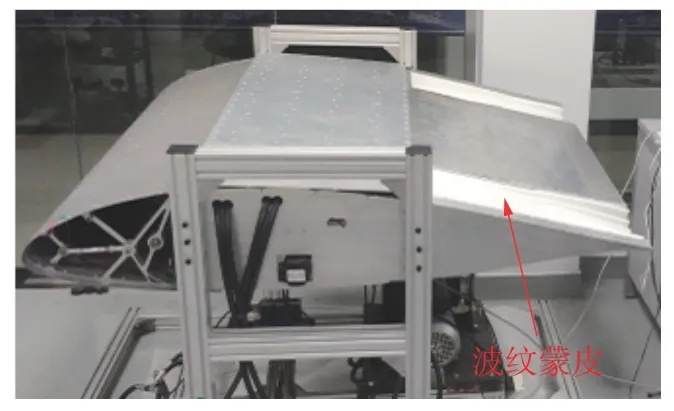
图10 后缘结构装配图Fig.10 Assembly diagram of the trailing edge structure

图11 柔性后缘变形效果图Fig.11 The effect of flexible trailing edge deformation
图11 为后缘位置15°时的变形效果图。实验测试数据如图12 所示。
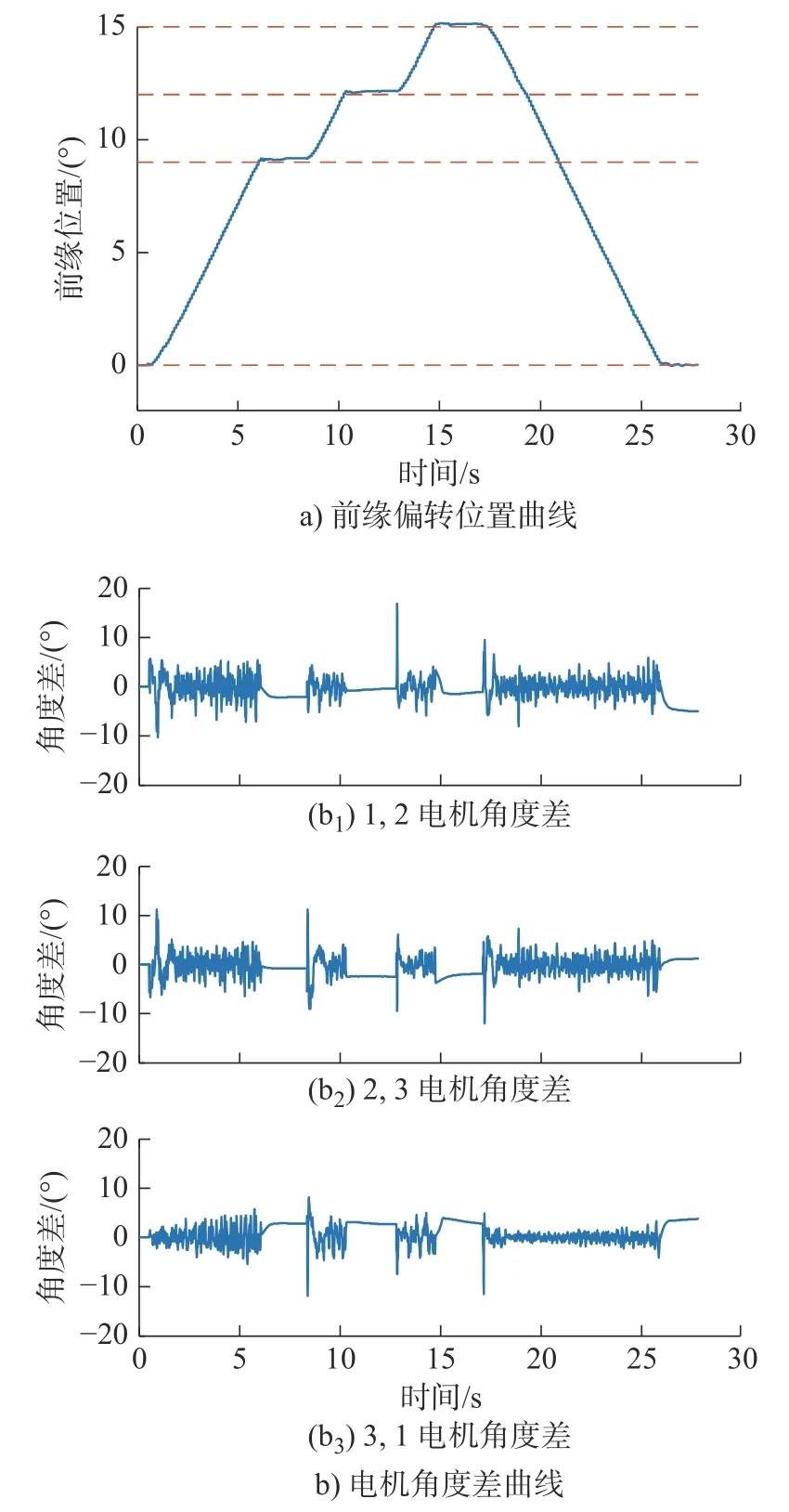
图12 后缘结构偏转实验曲线Fig.12 Experimental curve of trailing edge structure deflection
后缘结构三次向下偏转过程,偏转超调量均为0.17°;由15°回到0°初始位置耗时9.5 s,超调量为0.03°。图10b)为偏转过程中电机间的实时角度差:3 台电机在启动阶段因载荷和电机特性的差异,启动瞬时产生不超过20°角度差;匀速运行阶段电机角度差小于10°。
4.3 机翼后缘结构偏转的风洞载荷实验
风洞实验在南航低速风洞中进行,闭口实验段风速最高可达60 m/s。机翼攻角可调整,工控机及控制箱置于风洞实验段外部。实验中设定风速56 m/s,机翼采用四种不同攻角(0、6°、10°和12°),分别测试后缘结构不同攻角下的偏转效果。考虑到攻角为12°时的气动载荷最大,设定电机转速956 r/min,分别测试有无风载情况下的后缘结构偏转过程,测试数据如图13 所示。
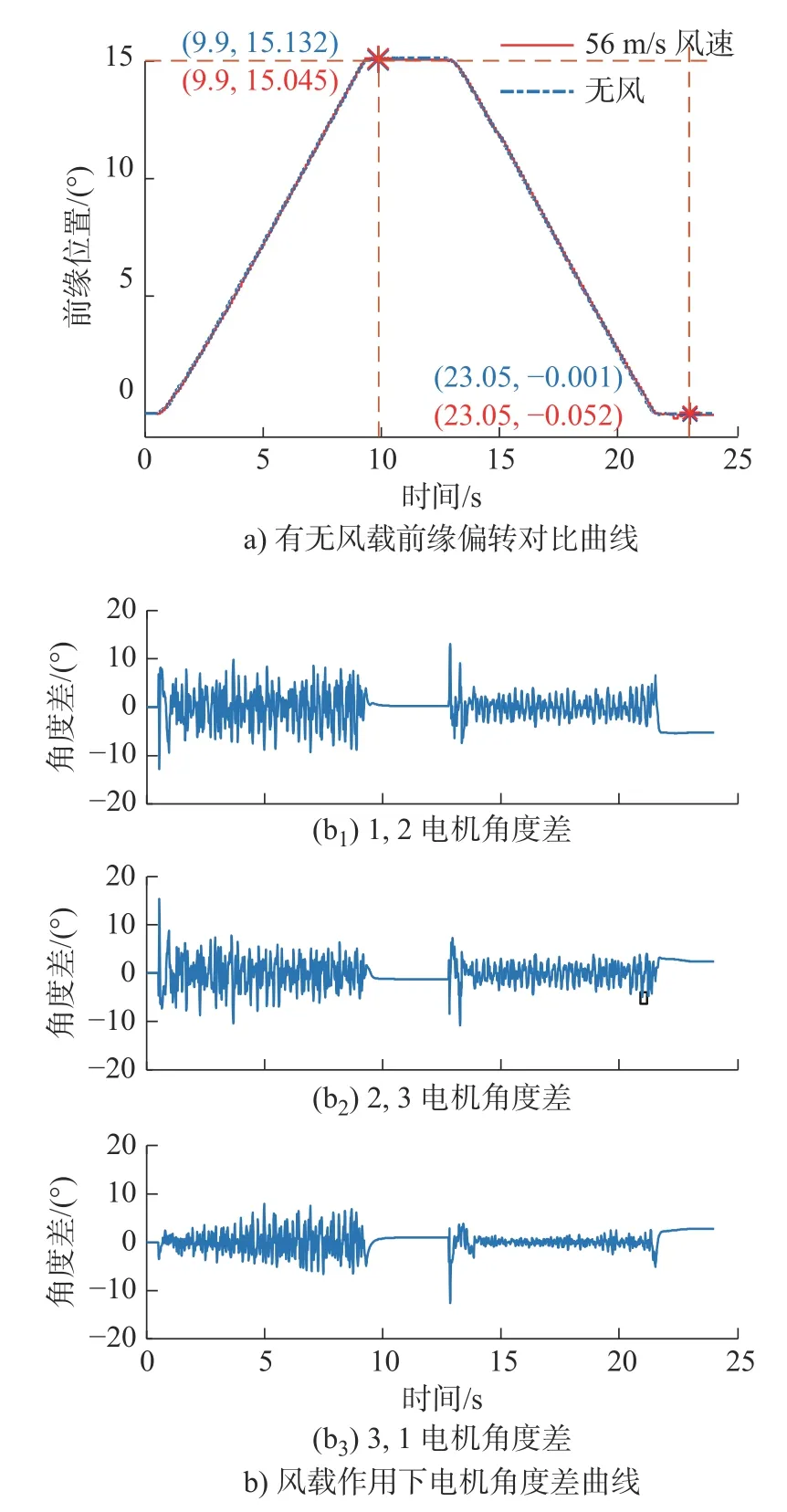
图13 低速风载下后缘结构偏转测试曲线Fig.13 Test curve of trailing edge structure deflection under low-speed wind load
由图13a)可以看出,风速56 m/s、攻角12°时,风载对后缘结构偏转无显著影响;有、无风载作用时,后缘结构向下偏转的超调量分别为0.045°和0.132°;上偏的超调量分别为0.052°和0.001°,与载荷无直接关系。
图13b)为风载实验过程中各电机之间的角度差:下偏过程启动阶段角度差最大为15°,匀速运行阶段角度差小于10°;上偏过程启动阶段角度差最大为13°,匀速运行阶段角度差保持在5°以内。
保持风速56 m/s,攻角不同时后缘结构下偏(0~15°)测试结果如表3 所示。
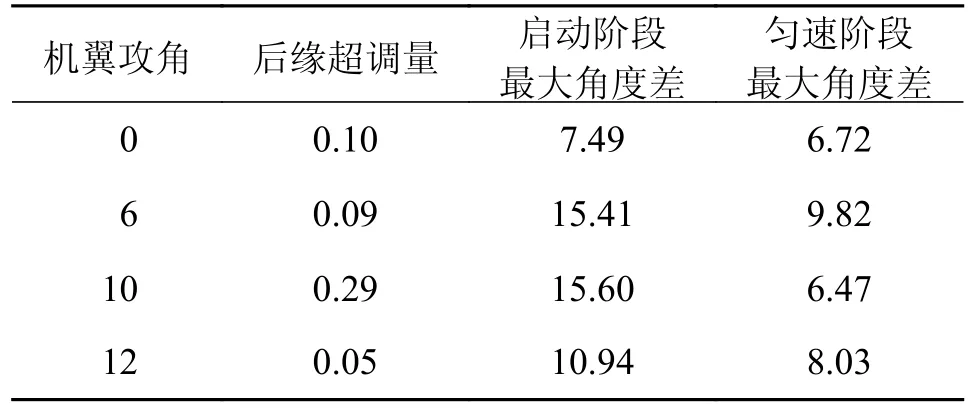
表3 不同攻角后缘结构下偏测试结果Tab.3 Test results for deflection under different attack angles for the trailing edge structure (°)
从表3 可以看出,不同风载情况下,控制系统可以实现后缘下偏超调量不超过0.3°,下偏启动阶段各电机间产生的角度差不超过20°,匀速运行阶段各电机角度差不超过10°,控制结果满足机翼偏转的设计要求。
5 结束语
本文基于偏差耦合控制理论,针对机翼柔性波纹蒙皮连接的后缘偏转多电机分布驱动系统,搭建了角度同步软硬件控制系统,完成了空载、地面载荷加载和风洞载荷实验。实验结果表明该系统在有无载荷情况下,控制和驱动系统均能够稳定的运行,而且具有很高的控制精度,满足机翼柔性后缘结构偏转的要求。
