基于电液直驱技术的半主动膝关节假肢设计
2023-10-15李振男刘春宝
李振男, 韩 阳, 任 雷, 刘春宝
(1.吉林大学 机械与航空航天工程学院, 吉林 长春 130022;2.吉林大学 工程仿生教育部重点实验室, 吉林 长春 130022;3.曼彻斯特大学 机械航天和土木工程学院, 英国 曼彻斯特 M139PL)
引言
由于下肢缺失,膝上截肢患者在日常生活中面临诸多不便。目前,绝大多数截肢者使用被动膝关节。被动膝关节假肢在站立期提供稳定的支撑,在摆动期能够随残肢自然运动,带有微处理器的假肢能够进一步改善截肢者的步态[1]。然而,被动膝关节假肢不能提供主动膝关节扭矩, 限制了摆动阶段的稳定性和其他复杂功能,如楼梯上升。因此,主动假膝采用动力执行器来解决问题,根据是否存在被动功能,分为全主动膝关节假肢和半主动膝关节假肢。全主动膝关节假肢由齿轮、同步带、丝杠或其他部件驱动实现膝关节的主动运动[2]。在全主动膝关节假肢的基础上,半主动膝关节假肢增加被动元件或机构,在站立阶段承担身体的重量以节省站立相的电池消耗[3]。ROUSE E J等[4]为膝关节设计了一种可离合器系列弹性执行机构,在站立期锁定,在摆动期进行主动驱动。FLYNN L等[5]设计的假肢CYBERLEGs通过一个带有大刚度弹簧的重量承载机构提供站立期的支撑扭矩。然而,这些动力执行机构通常由高速、低扭矩电机组成,并通过高传动比减速以产生足够的驱动扭矩[6]。这种高传动比的驱动方案具有较高的被动摩擦和较低的反向驱动能力,迫使假肢在摆动阶段进行主动驱动,而不是像被动膝关节假肢跟随大腿的自然运动,这给残肢带来不必要的运动冲击[7]。
为了保持被动假肢自由摆动的特性,研究人员提出了一种新的半主动方案:主动驱动单元与液压阻尼缸进行耦合。MENDEZ J等[8]提出了一种混合膝关节假体,将商用液压缸与电机驱动主动可变传动装置结合起来。被动水平行走传动比小,主动楼梯传动比大。然而,传动比的切换需要一段时间。王启宁等[9]提出了一种由变阻尼液压缸和通过减速机构直接驱动关节的低功率电机组成的混合膝关节。LEE J T等[10-11]将滚珠丝杠与液压活塞集成在半主动驱动器中,开发了一种液压混合膝关节假肢,该假肢增强了水平行走摆动阶段的稳定性。文献[9]和文献[10]的主动传动比分别为21∶1和75∶1。较低的传动比允许膝盖像被动膝关节假肢一样自由摆动,但导致主动扭矩不足(小于10 N·m)。因此,在电动假肢中,低被动摩擦与高主动传动比之间存在着明显的不相容性问题。研究表明,具有高减速比的电静压作动器广泛应用于航空航天、工业和机器人领域[12-13]。
本研究首先提出一种基于电液直驱技术的液压半主动驱动原理,通过液压回路完成两个独立的液压子系统的集成,有效解决了现有电动假肢低被动摩擦与高主动传动比不兼容的问题,开展相关计算分析,最后结合有限状态机控制,完成人体实验验证。
1 假肢原理设计与系统集成
1.1 水平行走步态划分
人体水平行走通常被划分为站立阶段和摆动阶段[14],根据足部与地面的接触情况以及膝关节的运动状态,一个步态周期可以进一步的分为四个阶段,如图1 所示。

图1 水平行走步态相位划分Fig.1 Phase division of level walking gait
站立早期:足跟触地,膝关节开始支撑身体重量,随后全脚掌着地,身体继续向前运动,髋关节向后至最大伸展状态。
预摆动期:髋关节向前屈曲,带动膝关节屈曲,同时足跟开始离开地面。髋关节持续屈曲,直至足尖离开地面。
摆动屈曲期:足部完全离开地面,膝关节跟随大腿进行摆动屈曲至最大角度。
摆动伸展期:足部离开地面,膝关节开始向前摆动,最终完全伸展;随后足跟再次触地,进入下一个步态周期。
1.2 假肢液压驱动系统设计
根据人体水平行走的运动学分析,足部再次触地的稳定性一方面依赖于摆动期的完全伸展,另一方面则是站立期的稳定支撑。因此,膝关节假肢应具备满足以下几个条件:首先,在站立早期,假肢需要提供可靠的支撑,其中被动支撑能有效降低电量消耗;随后,在预摆动期和摆动屈曲期,膝关节能够跟随大腿残肢进行自然的屈曲运动,降低刚性冲击;最后,在摆动伸展期,假肢为膝关节提供主动伸展,提高摆动鲁棒性。
电液直驱系统在传统液压高动力输出的基础上,体积更小,集成度更高。同时,液压阻尼器可以在较小的尺寸内产生较强的阻力。因此,基于电液直驱技术,结合液压阻尼调控方法,建立半主动液压驱动系统,包括主动组件(主动电机、柱塞泵)、被动组件(旋转阀、阀电机)、执行器组件(活塞、活塞杆、蓄能活塞、弹簧)、集成块等,如图2所示,点线和短线分别表示膝关节主动伸展和被动屈曲时液压油的流动方向。被动屈曲时,主动电机停转,旋转阀打开,无杆腔液压油经旋转阀流入有杆腔,活塞向下运动。主动伸展时,旋转阀关闭,主动电机启动,有杆腔液压油经柱塞泵增压后直接作用于无杆腔,推动活塞向上运动,活塞运动速度由泵转速直接控制。泵、阀、液压缸相互并联,实现主被动驱动系统集成,但又互相独立工作,通过被动系统获取低运动摩擦,通过主动系统获得大传动比、输出大范围扭矩。

图2 假肢液压原理图Fig.2 Hydraulic principle of prosthesis
此外,由于采用单出杆液压缸,在屈曲阶段通过蓄能活塞储存多余的油液体积并压缩弹簧进行储能,在伸展阶段释放。
半主动液压驱动系统通过被动阻尼旋转阀的开关实现支撑与被动屈曲运动的切换,充分发挥液压缸低摩擦特点,实现膝关节假肢在屈曲阶段能跟随穿戴者的意图运动,同时主动系统在摆动伸展阶段能输出强有力的辅助扭矩,实现低被动摩擦与高主动传动比的兼容。根据上述要求,对假肢关键元件选取如表1所示。

表1 假肢关键元件参数Tab.1 Parameters of key components of prosthesis
1.3 假肢结构设计与系统集成
在液压阀块的表面加工了一系列不同深度的孔,以连接各个液压组件。由此产生的工艺孔通过密封螺钉或者膨胀堵头实现密封。液压缸孔的表面必须足够光滑,以减少密封圈的磨损和液体的泄漏。如图3所示,液压驱动系统的所有组件都是在阀块中组装的,没有外部管道。系统集成度高,为假肢轻量化、实用化提供极大的帮助。
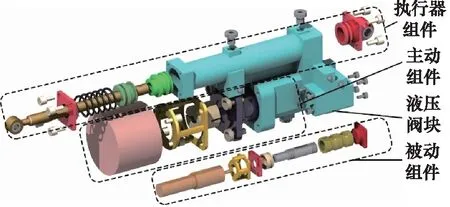
图3 液压驱动系统总体设计Fig.3 Overall design of hydraulic drive system
半主动电液膝搭载两种传感器,角度传感器与膝关节轴连接,测量其旋转角度,压力传感器与小腿杆固定以获取小腿轴向受力数据。同时,定制的嵌入式控制板和电机驱动器安装在假肢后面,2800 mAh容量的电池固定在假肢侧面。最终,假肢完成系统集成如图4所示,膝关节运动范围为0°~120°,整体高度为258 mm,总重量为2.8 kg(包括300 g电池)。

图4 假肢总体设计与系统集成Fig.4 Overall design and system integration of prosthesis
由正弦余弦定理得到膝关节角度与液压缸相对膝关节轴力臂的函数关系。再结合表1中的电机、泵、液压缸参数,计算得到膝关节角度与主动传动比曲线,如图5所示,在典型膝关节角度0°~90°范围,电机与膝关节的传动比为126∶1~174∶1,远大于文献[9]和[10]中的21∶1和75∶1。因此,电机在膝关节产生的理想扭矩约48~68 N/m。假设总传动效率为80%,电机仍可为膝关节提供39~55 N/m的主动扭矩。

图5 膝关节角度与力臂及主动传动比关系曲线Fig.5 Functional relationship between knee angle and transmission ratio of piston force and knee torque
根据前述的步态划分及驱动原理设计,将一个步态周期分解为四种工作模式,建立如图6所示的水平行走有限状态机,并给出状态转换的标志。
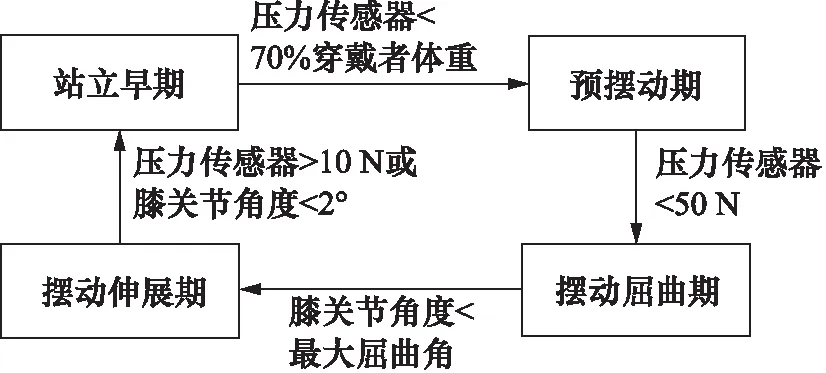
图6 水平行走有限状态机Fig.6 Finite state machine controller for level walking
假肢系统在各个状态的工作原理如下:
站立早期阶段:主动电机关闭,旋转阀关闭,液压缸被锁止,以保持站姿相位的稳定性。
预摆动期:主动电机关闭,旋转阀完全打开,膝关节跟随大腿进行被动屈曲。
摆动屈曲期:主动电机关闭,膝关节继续屈曲,旋转阀逐渐关闭,限制进一步的过度屈曲。
摆动伸展期:旋转阀关闭,主动电机启动,通过柱塞泵对膝关节进行主动伸展。
主动伸展阶段采用假肢及机器人系统常用的PD控制器[2],如式(1)、式(2)所示,主动电机转矩跟随膝关节角度变化,通过选取合适的控制参数,实现摆动期的完全伸展,增加再次触地时假肢的稳定性。
主动电机输出转矩为:
(1)
驱动系统输出到膝关节的转矩为:
T=nτη
(2)
其中,kp和kd分别是控制器的比例常数和阻尼常数,Δθ是假肢膝关节目标角度与实际角度的差值,n为主动传动比,η为总传动效率。
此外,在突发状况时,假肢需要保持良好的安全性。传统被动假肢的摆动伸展期阻尼较低,遇到障碍物时稳定性差,不能锁止膝关节,穿戴者易发生跌倒等危险情况。而本研究采用的控制器在不同膝关节角度时输出的力矩是固定的,当假肢在主动伸展阶段拌到障碍物时,假肢在阻碍下停止运动,而不是增大电机电流强迫假肢实现完全伸展,造成二次伤害。此外,假肢在摆动伸展阶段和站立早期,旋转阀均为锁止状态,遇到突发状态,假肢尽管触地时处于未完全伸展状态,但也保持膝关节锁止,进一步保证截肢患者的安全。
2 旋转阀结构设计计算与仿真分析
2.1 旋转阀结构设计
运动阻尼控制是膝关节假肢的关键问题。为了解决这一问题,研制了一种结构简单、性能良好的旋转阻尼阀。从图7可以看出,旋转阀主要由阀套、阀芯和挡块组成,阀芯半径为5 mm,进、出口由阀芯表面深度为5 mm的油槽连接;在槽的两侧均匀加工了三个均压槽,以平衡工作时产生的径向力;密封元件用于将进油口、出油口和外部环境分开;在阀芯和阀套之间为间隙密封;所有组件安装在集成块内。在该阀内,油槽的宽度和进出口的直径均为3 mm,因此最大的流动面积约为7 mm2。如图8所示,该旋转阻尼阀具有通流面积随旋转角度连续线性变化的优点,线性度为0.99538,较高的线性度能简化控制算法。

图7 旋转阀结构图Fig.7 Structure of rotary valve

图8 旋转阀角度与通流面积曲线Fig.8 Curve of rotary valve angle versus flow area
2.2 旋转阀液动扭矩仿真分析
液动扭矩是流体经过阀时产生的反作用扭矩,影响阀的控制力和系统稳定性,因此利用ANSYS/Fluent软件对旋转阀的液动扭矩进行了计算。首先对旋转阻尼阀三维模型进行布尔运算,得到流场计算域,并在ANSYS ICEM CFD中建立网格模型。进出口采用六面体网格,阀芯采用四面体网格,在边界层附近采用更精细的网格,提高了计算精度。如图9所示为旋转角度为0°时的网格模型。阀芯流域的表面被指定为壁面。
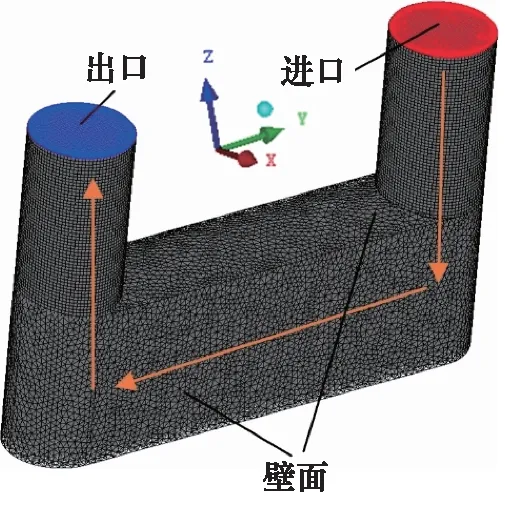
图9 旋转阀CFD网格模型Fig.9 CFD mesh model of rotary valve
基于健康膝关节运动[15]的生物力学数据,当100 kg使用者水平行走时,活塞的最大受力约为1500 N,液压系统压力约为5 MPa。因此,入口和出口边界条件分别设为压力出口,压力出口分别为5 MPa和0 MPa。采用Standardk-ε湍流模型计算。同时,设定液压油为不可压缩液体,密度880 kg/m3,动态黏度0.036 kg/(m·s)。在此模拟中忽略了泄漏量、粗糙度和热量的影响。
通过ANSYS/Fluent后处理软件提取了不同阀芯旋转角度下的液动扭矩的数据结果,如图10所示。随着旋转阀角度的增加,液动扭矩值先快速增加,当旋转角度在7°~13°的范围时趋于稳定,最后逐渐减小。开口角度最小和最大时,液动扭矩均为0。不同角度下的最大液动扭矩值为46.2 mm,远小于阀电机的额定转矩,旋转阀的液动扭矩不影响阀芯控制性能。
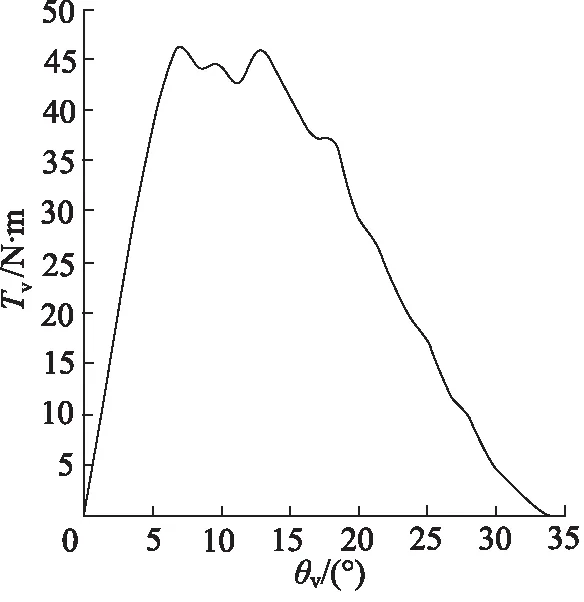
图10 旋转阀角度与液动扭矩曲线Fig.10 Curve of rotary valve angle versus flow torque
3 实验测试
3.1 被动摩擦力台架实验
为了评价图1中系统的低被动摩擦的效果,进行了台架实验。如图11所示,假肢驱动系统通过夹具固定在电机万能实验机上。测试前,驱动系统取下蓄能弹簧,旋转阀开度调到最大,活塞杆处于最大伸长量位置。测试时,实验机向下推动液压缸活塞并记录力和位移数据。
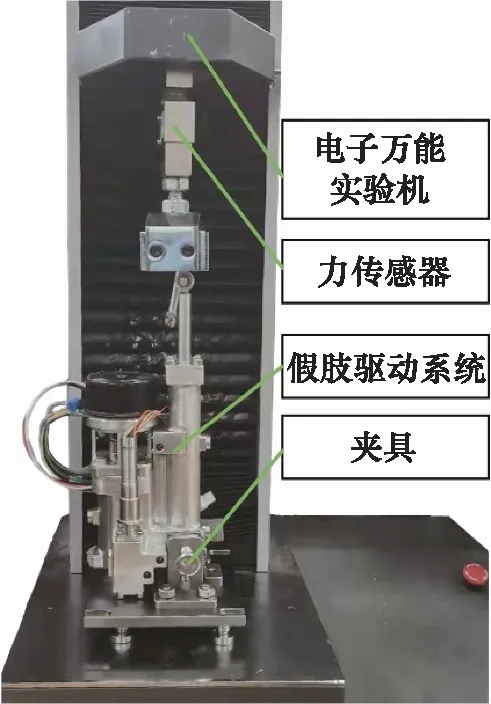
图11 被动摩擦力实验系统组成Fig.11 Passive friction experiment system structure
摩擦力测试结果如图12所示。由于加工公差的关系,在活塞运动过程中,摩擦力是波动的。平均摩擦力约为3 N,转换为在膝关节产生的摩擦扭矩约为0.1 N·m。低被动摩擦特性确保了假肢能跟随大腿残肢运动意图进行被动屈曲的性能。

图12 驱动系统被动摩擦力实验曲线Fig.12 Passive friction test curve of drive system
3.2 截肢者水平行走实验
邀请1例单侧非血管膝上截肢患者(男性,39岁,83 kg,1.74 m)参与实验。采集数据前,对患者进行半主动假肢适应性训练,同时调整控制器参数。如图13所示,展示了患者在一个完整步态周期的水平行走运动。测试过程中,患者以自选行走速度运动,并以100 Hz频率收集膝关节运动角度和主动电机的电流值。上述人体实验经吉林大学第二医院批准(No.2021072),实验前受试者均提供知情同意书。

图13 截肢者佩戴假肢进行水平行走Fig.13 Amputee wears prosthesis in level walking
如图14所示,是假肢膝关节角度在一个步态周期内的运动角度,黑色曲线为平均值,灰色区域是标准偏差。在站立前期旋转阀关闭,膝关节角度几乎没有发生变化,预摆动期和摆动屈曲期,膝关节进行被动屈曲运动,最大屈曲角度61.5±1°。参考其他主动摆动屈曲型假肢,文献[7],文献[9],文献[10]的最大屈曲角度约63°,文献[5]的最大屈曲角度约为50°。液压半主动膝关节假肢依靠被动运动的惯性实现了与主动屈曲效果相当的运动范围,充足的被动屈曲角度,体现了液压半主动假肢的低被动摩擦的优势,同时,屈曲角度越大,假肢运动过程中足部离地间隙越大,行走稳定性越高。在摆动伸展期,主动系统介入,通过主动电机电流,估算输出到膝关节的主动扭矩,结果如图15所示。在摆动伸展期,主动系统的高传动比为假肢提供充足的动力输出,驱动系统提供的瞬时最大转矩超过50 N·m,平均转矩12.2 N·m,实现了膝关节实现完全伸展,提高了摆动末期的鲁棒性。
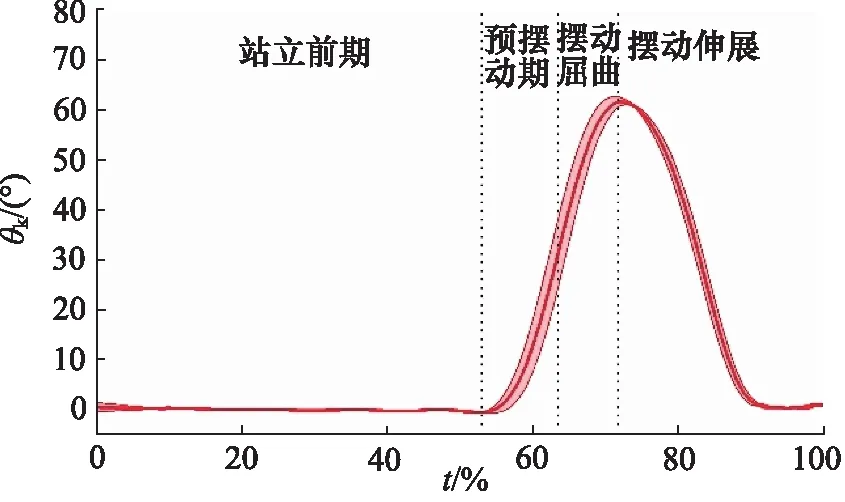
图14 假肢膝关节角度曲线Fig.14 Knee angle curve of prosthesis
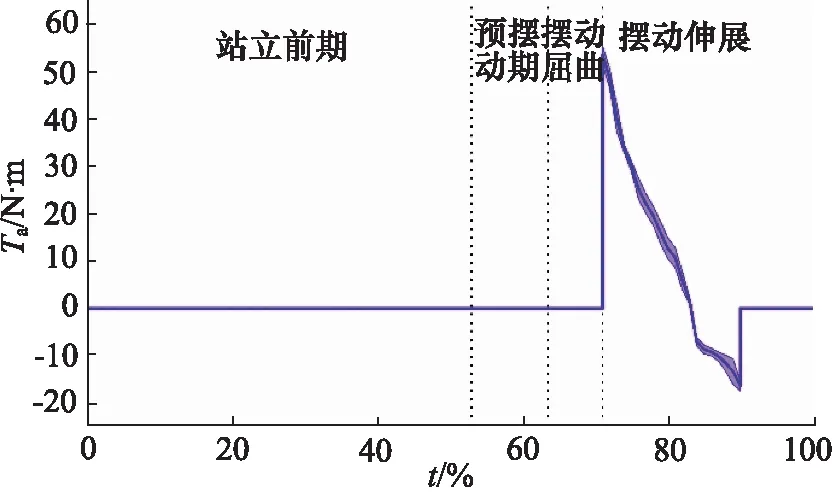
图15 膝关节主动扭矩曲线Fig.15 Active knee torque of prosthesis
4 结论
本研究提出了一种液压半主动膝关节假肢的总体方案,设计基于电液直驱技术的半主动驱动原理并实现假肢系统集成。开展旋转阀的结构设计,通过仿真分析验证其合理性。进行台架和人体测试,评估假肢的系统性能。半主动液压膝关节假肢充分利用液压传动的特点,使假肢能跟随大腿运动意图进行被动屈曲,同时摆动伸展阶段输出大范围的主动扭矩,有效的解决现有电动假肢被动低摩擦和高主动传动比之间的不兼容问题。
