“空地水”一体化测绘技术在航道测量中的应用
2023-10-14张旻
张 旻
(中铁第四勘察设计院有限公司,武汉 430063)
引言
长江航道途经地域地形复杂多变,受各种自然条件的影响,航道一直处于动态变化之中。 另一方面,工程建设也影响到航道的周边环境,定期地形监测对了解航道运行现状,制定航道整治方案,动态指导航道疏浚施工及维护至关重要。 长江航道测绘的主要内容有:航道水深监测、整治建筑物沉降位移及水毁监测、岸线变化及堤岸稳定性监测、沙洲体积变化监测、航道辅助设施状态监测等。 已有学者展开相关研究,邹小锋等对长江航道测绘存在的问题及建设方向进行研究[1];石硕崇概述国内外航道测绘的研究现状,并对长江航道测绘的研究和发展提出了建议[2];蔡颜梦等介绍近年来长江航道测绘信息成果的相关情况,针对长江航道测绘地理信息成果管理体系建设内容展开了分析,内容包括数据成果分析、建设数据中心、大数据成果管理、数据异质备份及数据分析和使用等[3];胥洪川等为进一步提高河道业务生产效率,保证数据成果质量,设计了长江上游河道业务处理系统[4]。 目前,航道常规地形、地物数据采集方法主要包括RTK陆上地形测量、单波束水下地形水深测量等,测绘成果通常只能以坐标点、矢量线形式体现在图纸上,无法获取测区直观的影像资料,并且受现场测量技术和条件的制约,在测区较大、特殊或危险地区、测量时间紧、任务重、通航或施工繁忙等情况下,难以保证测量的时效性、一致性和完整性等方面充分满足需求。
1 长江航道测量现状
近年来,随着无人机低空摄像测量、多波束扫测、三维激光扫描等高新测绘技术的发展和应用,常规测绘方式的不足已得到了部分缓解,能够提供更丰富、更直观、更全面的测绘成果。 徐鹏鹏等论述无人机摄影测量和三维激光扫描仪互补的测量方法在陆上测量实例中的应用[5];孙爱国等认为,在合适的内外部条件下,无人机测量技术适用于长江航道1 ∶500 等大比例测图场景[6];袁曹振等引入无人机低空摄影测量技术对航道整治建筑物实施1 ∶1 000 大比例观测,获取了亚米级的高清影像数据,生产了DOM 和DSM、DLG 数字地形图数据[7];梁达炜等概述多波束、激光雷达、无人船、无人机等测绘设备在航道测量中的必要性[8];马随阳等针对桥梁测量的传统测量方法、无人机倾斜摄影与地面三维激光扫描耦合方法,开展了桥梁三维建模方法对比研究,系统分析两者的技术特点与不足,并提出航道测绘技术创新的建议[9]。
对于低空摄影测量而言,无人机结构简单、机动灵活,是获取陆地测绘数据的一种重要技术手段,能够获取高清晰、大比例、高现势性的影像资料,可直观反映测区的岸线、建筑、特种地物地貌等。 但在芦苇、树林等地面遮挡严重的区域和特殊地形区域(如陡岸、崩岸),其测量精度难以达到要求,也无法承担水下地形、地物测量任务。 对于三维激光扫描而言,该测绘技术可获取被扫对象表面的三维坐标和深度影像信息,构建高精度的三维模型,具有精度高、速度快等优点,但其成本高,数据处理复杂,只适用于对部分重点区域、重点地物的扫描。 付作民等分析了在巷道管理中应用多波束测深系统开展测量的相关流程及测探结果[10];李宇辉等针对航道测绘中需全覆盖、高精度测量问题,结合工程项目的实际情况,探讨多波束测深仪在航道测绘中的应用效果[11]; 杨海忠等以SEABAT8125 多波束测深系统在某航道疏浚工程为研究对象,探讨多波束测深系统安装测试方法、定位导航实施方法、测量步骤与数据处理思路[12]。 边志刚等通过对船载水上水下一体化综合测量系统实施海岛礁、陕西黑河水库一体化测量案例,阐明系统在应用中的优缺点[13]。 赵春明等对水上水下无缝一体化测量进行了探讨,对陆海垂直测绘基准统一的测量方法进行了尝试[14];一体化快速测绘系统是将多种测绘传感器集成在同一个载体上,进行空中、地面及水下的一体化测绘,同步采集多目标数据[15-17]。 对于多波束测量而言,其测量精度可与单波束测量相当,但效率远高于常规单波束水深测量,可极大提高水下地形测绘效率,但其只适用于具备一定水深条件的水域,不适用于浅区及陆上地形测量。 为了克服传统测绘中测量点离散、成果形式单一、作业效率低下等缺点,对长江航道测量开展“空地水”一体化测绘技术研究。
2 系统组成原理及架构
2.1 系统主要技术参数
一体化多源数据融合处理及可视化编辑系统平台可以对航道多种测绘技术进行协同采集与数据融合处理,并自动生成基于多源数据的航道地形数字地面模型,对航道整治工程河道影响变化进行多时相分析,进而实现多源数据管理与展示。 “一体化测量系统”的主要设备见表1。
3.2 系统架构
平台架构分为数据管理、多源数据导入、数据编辑处理、数据分析及成果输出等5 个部分(见图1)。

图1 多源数据融合系统架构
(1) 多源数据管理
“空地水”一体化测绘包括控制测量、无人机航摄、多波束水深测量和激光雷达测量4 个方面的数据,系统平台通过工程管理实现了对原始控制数据、点云数据、影像数据,以及加工后的产品数据等数据的存储管理[18]。
(2) 多源数据导入与融合
系统能导入项目涉及的数据源。 如控制成果、激光点云、全景影像、正射影像和三维模型等,可将水上水下数据在平台中进行融合。
(3) 数据编辑处理
系统平台可对点云数据及矢量数据进行编辑处理,其主要功能框架见图2。
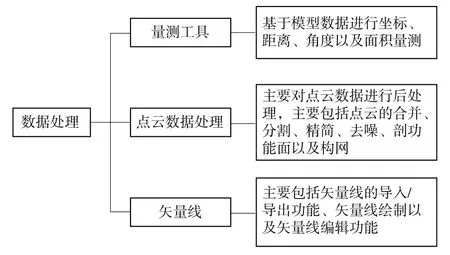
图2 数据处理框架
(4) 数据展示与分析
支持多种模式的点云渲染及数据显示,利用多波束水深数据,提取航道断面,通过不同时期测量成果的断面叠加,对航道演变进行分析。
(5) 数据成果与输出
包括输出数据文件、三维模型、DEM、矢量文件等。
3 系统关键技术研究
3.1 多源数据一体化协同融合处理技术
软件平台研发过程中综合采用上述技术,即利用实景数据和高密度点云三维坐标对航道沿岸地形空间数据和属性数据进行一体化采集,研究多源数据的协同融合处理技术,依据统一的数据标准进行处理融合及加工处理,以用于数据融合展示与分析。 基于自主研发的后处理软件,进行针对性定制开发,将多源测量数据所具有的不同时间和空间基准进行高精度配准,实现了无人机摄影测量、三维激光扫描、多波束测量以及单波束测量多种传感器采集的数据协同处理生产,构建了“空地水”一体化的航道测绘和动态监测体系。
3.2 航道多源数据可视化集成与展示应用技术
长江航道地理数据形式多样、维度不一,既有空间数据也有属性数据,既有删格数据也有矢量数据。 如何对这些数据进行统一管理和展示,尤其是水上水下三维地形地物的展示,是本系统的一个关键点。
将获取的高精度航空摄影数据、水上水下点云数据等进行集中海量存储管理,并通过研发三维地形集成展示平台实现多源数据、三维动画、航拍影像展示,以及大比例的 DLG、DOM、DEM 测绘产品的展示和重点区域、整治建筑物的三维场景展示[19-20]。
3.3 TB 级海量点云引擎技术
多源数据不同于传统的4D 产品,传统的数据量一般为百兆级别,而多源数据一般为GB 至TB 级别。海量数据的存储、管理、调用等是系统平台运转的关键。 三维激光扫描仪点采集速度可达1 000 000 点/s,扫描采集一个场景通常可获得上百万个点;多波束测深仪以全覆盖方式采集水下地形数据,其数据量也达到了TB 级。 根据现场作业时的扫描视场与扫描速度设置,一次作业需要扫描的点云数量可达亿级。 以一个测次数据量为例,三维激光雷达采集的数据量见表2。

表2 三维激光雷达采集数据量
4 长江航道应用示例
为了验证多源数据融合处理及展示平台在长江航道测量中的适用性,选取了武安段航道整治项目中的张家州水道和沙洲水道的护岸工程、护底带工程、护滩工程作为算例。 张家洲水道和沙洲水道涵盖了长江干线航道的冲刷、淤积、冲槽、崩塌、分流等现象,其地形复杂,航道整治工程种类多样,能够代表长江航道整治的主要情况,按照上文介绍的技术路线,在试验区域现场进行系统的联合运行调试和应用,包括实地采集各项数据、利用软件进行数据处理等,开展多种测绘技术协同采集与数据融合处理技术应用,对成果数据进行动态可视化展示和分析。
利用多波束水深数据,提取航道断面,通过不同时期测量成果的断面叠加,对航道演变进行分析。
此外,在多波束测量数据中截取工程区中的重点断面(见图3、图4),与工程区的设计文件进行断面对比。 分析工程区的变化情况(见图5、图6),其中,紫色线为设计测量河床线,蓝色线为2020 年9 月测量河床线,通过对比,可以清楚地看出工程实施后河床地形的变化,以分析工程的实施效果。

图3 重点断面位置选择

图4 重点断面高程位置

图5 沙洲水道左汊护底工程轴线断面比较(单位:m)
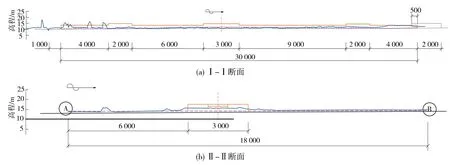
图6 沙洲水道左汊护底工程2 个横断面比较(单位:m)
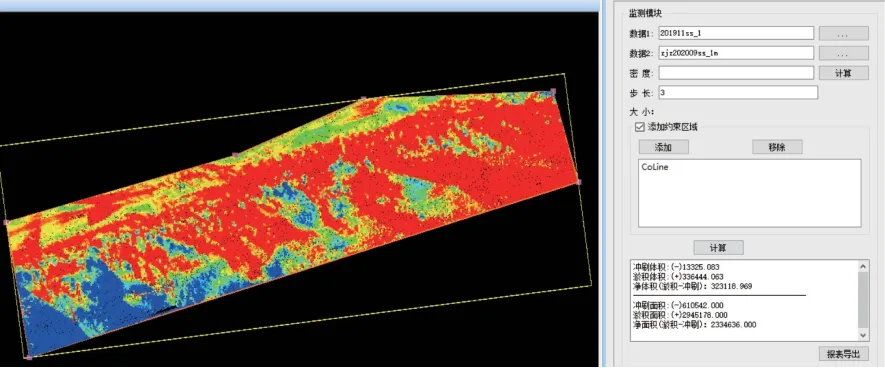
图7 两期数据对比的冲淤变化
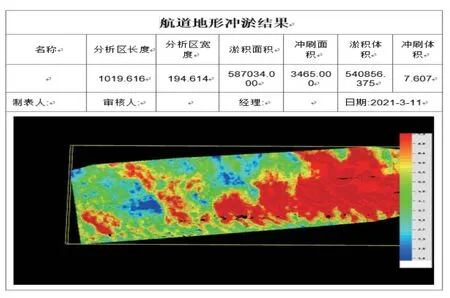
图8 报表导出结果
对同一区域不同测次的数据进行冲淤分析,计算冲淤量,分析航道冲淤情况,为航道清淤决策提供依据。
长江航道地理数据形式多样、维度不一,既有空间数据也有属性数据,既有删格数据也有矢量数据,研究的航道多源数据可视化集成系统可将三维实景、点云管理展示引擎进行二次开发集成,将获取得到的高精度航空摄影数据、水上水下点云数据等进行集中海量存储管理,研发三维地形集成展示平台实现多源数据展示、三维动画展示、航拍影像展示、大比例的 DLG、DOM、DEM 测绘产品的展示,以及重点区域、整治建筑物的三维场景展示。
5 精度分析
(1) 多波束测深精度分析
多波束测深平面中误差达到0.19 m,高程中误差达到0.18 m,具体统计情况见表3。

表3 多波束水深比对结果m
(2)激光雷达点云精度分析
为检核激光雷达数据的精度,实施测量时,在沙洲水道测区选择10 个,在张家洲水道测区选择了41 个具有明显特征的点进行观测,获取其精准的平面坐标及高程值,与激光雷达采集的点云数据中的同名点进行比对,以获取点云的平面及高程精度。张家洲水道测区激光雷达数据平面及高程精度分析见表4、表5。

表4 激光点云平面精度分析cm

表5 激光点云高程精度分析cm
由表4、表5 可知,表中计算所得的中误差值均满足规范精度要求。
6 结语
(1)将“空地水”一体化测绘所采集的Lidar 数据、多波束数据,以及收集到的电子航道图、整治工程的线划图等数据,依据统一的数据标准进行处理融合及加工处理,有利于数据融合展示与分析。
(2)多源数据不同于传统的4D 产品,传统的数据量一般在百兆级别,而多源数据一般的几百GB 甚至TB 级别。 海量数据的存储、管理、调用等是系统平台运转的关键。
(3)针对长江航道及两岸的整体地形状况,通过多种测绘技术手段的有机结合,从数据采集到数据处理的各环节,将激光雷达系统、多波束测深系统等处理软件整合集成引入航道一体化协同测绘平台上,构建“空地水”一体化的航道测绘和动态监测体系,形成了一套适用于长江航道的多工作平台多设备协同一体化测量作业流程及作业规范。