卫星影像大场景立体模型精度控制方法研究
2023-10-14王涛
王 涛
(中铁第一勘察设计院集团有限公司,西安 710043)
铁路勘察设计工作一般基于(1 ∶2 000) ~(1 ∶50 000)比例平面地形图构建的二维场景[1],由于平面地形图多采用等高线、地物边界线或特定符号表现地形、地貌及地物信息,其构建的铁路沿线二维场景存在缺乏立体感、不直观等问题[2],不便于铁路勘察设计人员开展专业踏勘、设计验证和方案展示等工作。 针对传统二维场景存在的不足,真实三维场景模型的构建方法成为测绘领域研究的热点[3],测绘技术从二维到三维的转型升级正面临前所未有的发展机遇和巨大挑战[4]。
基于像片对的立体模型是摄影测量的核心和基础[5],一般情况下,立体观测范围仅仅局限于立体像对的重叠范围,这样使得立体模型的应用受限[6]。 大场景立体模型突破了单个像对的限制,能够提供一个连续无缝的真三维立体环境[7],成为一种新型立体模型技术,航空影像数据进行大场景制作已经在勘察、设计等多个工程领域得到广泛的认可[8]。 而传统采用航空数据生产大场景立体模型的方法,存在原始影像像幅小、摄影成本高、工期控制困难等问题[9],若要对某区域进行长时序的建模与分析,无人机和有人机在数据获取方面成本较高,且难以满足特定场景的快速三维构建[10]。
卫星影像能够全天候获取影像数据,避免了天气、空域等因素的制约,利用立体卫星影像数据进行三维模型构建值得研究[11]。 为了弥补现有大场景技术的不足,使用高分辨率航天卫星影像代替传统航空影像来制作大场景立体模型,为工程勘察设计提供一种全新的、高效的勘测手段。
1 大场景立体模型原理
20 世纪70 年代,COLINS 基于正射投影对构造立体模型进行相关的研究,提出基于单个立体正射像片对的概念[12],其基本原理是,地物碎部点的视差可以理解为数字高程模型(DEM)高程引起的视差与地物点到DEM 的高差引起的视差之和,对立体像对的左右片分别制作正射影像,在其中一张引入DEM 高程引起的视差,使其成为辅助立体正射影像,便可得到立体正射像片对。
为了形成与实际地形相一致的立体模型,通常采用对数函数作为视差引入函数。 对数投影法引入视差的函数为
式中,B为基线长度;H为航高;Z为DEM 地面点到基准面的高差;P为该高度对应的视差。
李德仁对相关理论进行完善,提出基于无缝镶嵌的数字正射影像和立体辅助影像,构建一个大范围可量测无缝正射影像立体模型,再根据视差函数对整体的左镶嵌正射影像引入视差,生成一个辅助影像,由正射影像和辅助影像构成一个无缝正射影像的立体模型[13];王争鸣对大场景的制作方法进行改进,通过记录航向、基线长度等信息,按各模型的基线方向引入DEM 视差,确保视差计算的正确性[14]。 通过对视差的量测,可反算出高程,若量测正射影像上的为非地面点时,如房屋、植被等,则会有平面投影位移,碎部点的平面投影位移见图1。

图1 碎部点平面投影位移
由图1 可知,碎部点高程已知,由此可以计算出平面投影位移,从而来改正正射影像上量测的平面坐标,最后可得出碎部点的准确平面坐标。
2 关键因素及其精度控制
卫星影像大场景立体模型技术的关键在于使用数字高程模型,通过合理的拼接线把各子单元的立体原始双片映射为2 张大场景影像,生成左右大场景影像后,即可在视差生成基线方向中投射出三维立体效果。制作流程见图2,影像匀光匀色、空三加密、DEM 生产与编辑和拼接线编辑是大场景立体模型生产过程中的关键工序。 其中,空三加密须具有足够高的精度,否则没有使用价值[15]。 因此,影像匀光匀色、DEM 生产与编辑和拼接线编辑3 个环节是影响大场景立体模型成果的关键因素。
卫星影像获取过程中,由于摄影时间、光照不一致等因素的干扰,原始影像在色调、亮度、反差等方面存在一定差异,若直接使用原始影像,则会导致大场景立体模型成果在像对间存在明显差异,给后续使用和信息判读带来困难[16]。 因此,需要对原始卫星影像进行匀光匀色处理,保证生成的大场景立体模型具有自然的纹理过渡及良好的视觉效果。
DEM 的生产过程比较复杂,容易产生粗差[17],在大场景模型制作和量测过程中,DEM 的精度是影响量测精度的重要指标。 如果DEM 模型不准确,那么DEM 与真实地形的高差会转化为视差残留在大场景左右影像上,正射影像对的高程精度受到DEM 高程误差的影响[18]。 基于立体像对匹配生产的DEM 时,对于地形平坦地区,原始DEM 粗差较小,对于大高差、地形变化剧烈的山地环境,原始DEM 粗差较大,有时甚至把整个山体或沟谷都拉到同一平面。 若不区分地形等级,以同一标准对DEM 进行编辑,则不能达到预期效果,标准太高会耗费大量的非必要的人工与时间成本。 因此,需首先确定在各级地形下,不同程度的DEM 粗差对大场景视觉效果和数学精度的影响。 在此基础上,针对不同等级地形,在立体环境下对DEM进行编辑,将其粗差降至可控范围内。
拼接线质量决定了卫星影像大场景立体模型的整体视觉效果。 同时,影像拼接线矢量数据中存储了大场景立体影像像对属性信息,是衔接相邻影像的基础矢量数据。 首先由大场景立体影像生产软件获取影像初始拼接线,再通过第三方GIS 软件套合辅助正射影像进行编辑。 编辑时应避开独立地物、桥梁、房屋等,以保证建筑物的完整性;应避开树林、水塘等,选择高差起伏小的地方进行影像拼接。
以某山区铁路为例,采用地面分辨率为0.5 m 的WorldView 卫星影像进行实验,量化上述因素对大场景立体模型精度的影响,以实现对卫星影像大场景立体模型精度的有效控制。
2.1 影像匀光匀色
截取小范围的影像作为参考模板,以参考影像为基准,对其余影像进行处理。 影像匀光匀色效果见图3,原始卫星影像为全色影像,亮度不均匀、明暗不一致,镶嵌影像存在明显的亮度差异,影响大场景立体模型的色彩表达。 经匀光匀色处理后的影像亮度一致、细节清晰,镶嵌线处的色彩差异小、过渡自然,视觉效果良好。
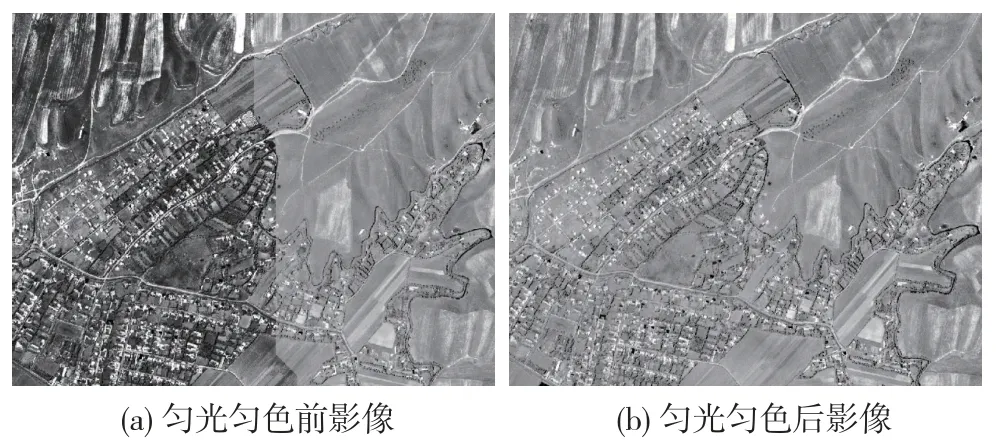
图3 影像匀光匀色效果
影像的均值反映其色调和亮度,标准差反映其灰度动态变化范围[19],并在一定程度上体现反差,理想情况下,镶嵌范围内的影像应该具有近似的均值和标准差[20]。 图3(a)左侧影像经匀光匀色处理统计参数见表1,可以看出,匀色后影像与参考影像灰度均值和标准差均较为接近。

表1 影像匀光匀色前后参数比较
2.2 DEM 生产与编辑
在Ⅰ、Ⅱ、Ⅲ、Ⅳ级地形下各选择5 个点,对测试点对应的DEM 模型引入2,5,10 m 的粗差,在此基础上生成大场景模型,并统计引入粗差后的大场景立体模型与原模型在视觉效果和数学精度方面的差异,实验结果见表2。

表2 DEM 引入粗差后大场景坐标与原坐标较差统计_____________m____
DEM 引入2 m 与5 m 粗差后,对生成的大场景点位坐标与原坐标的较差值绘制曲线,见图4。
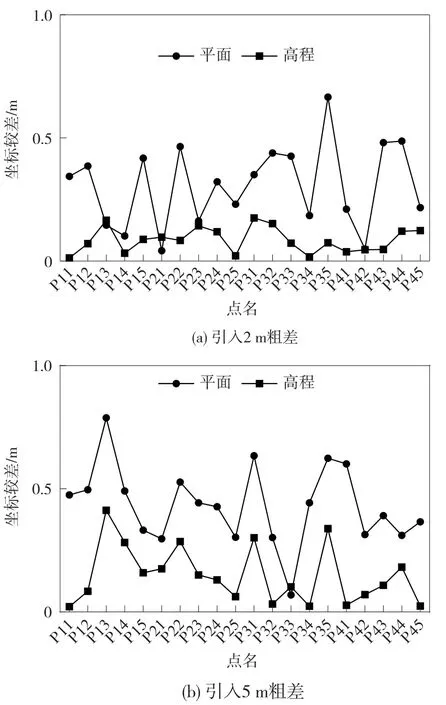
图4 DEM 引入粗差后大场景坐标与原坐标较差(单位:m)
在道路的同一位置(Ⅰ级地形),对DEM 引入粗差后,大场景立体模型视觉效果与原大场景立体模型对比见图5。

图5 DEM 引入粗差后大场景立体模型对比
由上述实验可得出如下结论。 ①DEM 的粗差不论大小,都会影响大场景立体模型视差的正确表达,影响地面能否切准,从而影响数学精度。 ②DEM 的粗差达到一定阈值时,会使大场景立体模型发生变形,影响判识精度。 对于Ⅱ、Ⅲ、Ⅳ级地形,DEM 粗差在5 m 内,大场景立体模型变形程度较小或无变形;对于Ⅰ级地形,DEM粗差在2 m 内,大场景立体模型变形程度较小或无变形。 ③DEM 的粗差在容许范围内时,粗差大小对生成的大场景立体模型数学精度影响不明显。
2.3 拼接线编辑
由于卫星影像成像的年份、季节不同,河流在相邻影像上的灰度、纹理有很大差异,拼接情况见图6。 图6(a)左侧影像河流处于丰水期,流量充沛、河道宽阔,右侧影像河道明显变窄、灰度偏暗,若拼接线不做编辑,会造成空间的切割感。 对此处的拼接线作绕避处理,使拼接线从河岸边地面弱纹理区域穿过,生成的大场景模型立体像对接边处自然过渡。 同样的,对全局拼接线进行编辑,使其绕避独立地物、交通网、水系等,在高山区拼接线应沿着沟心行进,以避免拼接处的影像变形和拼接痕迹明显。
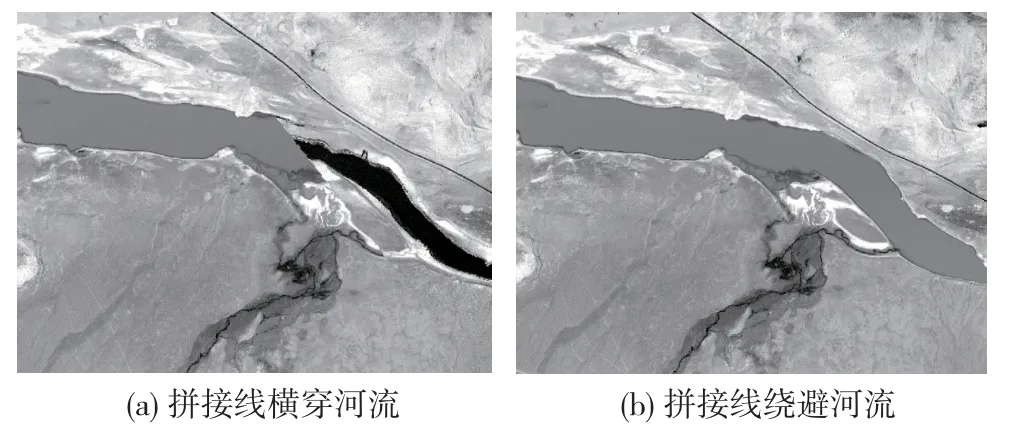
图6 编辑拼接线效果
3 实验分析
基于以上精度控制方法,制作了该铁路全线地面分辨率为0.5 m 的卫星影像大场景立体模型,共计6 000 km2,整体色调均一、反差合理,视觉效果良好(见图7)。

图7 某境外铁路卫星影像大场景立体模型
在Ⅰ、Ⅱ、Ⅲ、Ⅳ级地形下,各选择20 个像控点作为在大场景立体模型上的坐标,计算大场景立体模型坐标与外业实测坐标的差值,结果见图8。 由于目前没有大场景立体模型精度指标的相关规范,参考Q/CR 9158—2020《铁路卫星定位与遥感测量技术规程》中对1 ∶1 万地形图各级地形绝对定向误差限差的规定。 根据图8 统计坐标较差最值,统计结果见表3。 可以看出,卫星影像大场景立体模型定向精度符合规范要求,且模型精度与地形等级无显著联系。

表3 卫星影像大场景绝对定向精度统计m
本项目中,大场景立体模型的制作仅需54 张卫星影像,如果采用航空摄影的方式,则需要上万张原始影像数据,另外考虑摄影条件、空域申请、摄影设备、人员投入等,使用航天卫星影像的立体大场景生成方法,具有显著优势。
4 结论
主要研究卫星影像大场景立体模型制作过程中的精度控制问题。 在卫星影像大场景立体模型制作环节中,对影响模型精度的关键因素予以论证、分析和量化,形成一套完整的精度控制方法,并将其应用到某铁路项目的大场景立体模型制作中,模型中定向点的平面、高程坐标最大残差为1.81 m 和0.95 m,成果满足相应规范要求。
卫星影像大场景立体模型可以提供一个连续无缝的真三维立体环境,精度高、成本低、直观性强。 其作为一种新型数字测绘产品,不仅能够服务于铁路线路三维虚拟踏勘、专业设计验证和方案三维展示分析等工作,还广泛适用于其他领域,应用前景广阔。