基于速度方差判别的航迹关联方法研究
2023-10-12杨璇刘静杨森畅言
杨 璇 刘 静 杨 森 畅 言
(西安电子工程研究所 西安 710100)
0 引言
在多目标跟踪中,由于量测过程中的虚警、杂波、噪声等因素影响,从而导致量测的起源具有不确定性。航迹点迹相关(也叫“数据关联”、“航迹关联”)就是把雷达的量测回波与已有目标航迹进行配对的过程,从而保证每个更新量测以较大的概率与其所属的目标进行关联,如果数据关联不正确,轻则引起跟踪滤波精度下降,严重时会引起跟踪滤波发散,导致丢失目标。工程中比较具有代表性的数据关联算法有最近邻域法[1](Nearest Neighbor Filter,简称“NNF”)和概率数据关联算法[2](Probabilistic Data Association,简称“PDA”),上述两种方法均利用关联波门获得航迹与点迹的配对,但关联波门是基于航迹目标的新息协方差获取,由于新息协方差矩阵只考虑了航迹预测值与点迹量测值之间距离的因素,不能避免一些虚警点迹进入关联波门,导致后续跟踪质量下降。
基于此,本文提出了一种基于速度方差统计提升雷达航迹点迹相关正确性的方法,该方法在已有数据关联算法的基础上,引入了基于速度方差判别的航迹关联处理,对落入关联波门的点迹,利用关联点迹瞬时速度变化量和航迹速度方差统计结果做一致性判别,通过该判别选通,可进一步降低虚假点迹对航迹关联的影响,提升了航迹点迹相关处理的置信度,实现了复杂态势环境下对目标的稳定跟踪。
1 算法工作原理
基于速度方差统计的航迹关联方法是已有数据关联算法的基础上,利用速度方差信息进行判别,进一步优化航迹点迹配对矩阵,对不满足速度方差统计判别的点迹与已有航迹的解耦,完成航迹点迹配对矩阵的降维处理,提升后续航迹点迹关联置信度。该算法主要包括3部分内容,即航迹点迹配对矩阵生成、速度方差判别处理和速度方差更新模块。
1.1 航迹点迹配对矩阵
航迹点迹配对矩阵是航迹点迹相关处理的初始环节,其利用量测值、航迹预测值、新息协方差等信息完成已有航迹与点迹的配对,形成航迹点迹配对矩阵。在多目标跟踪系统中,输入的点迹是可能属于新发现的目标,也可能是已有航迹的更新点迹,对于初步判断是航迹更新的点迹,由于此时多目标跟踪时已经建立航迹的目标不止一个,因而还需要进一步确定新录取的点迹是属于已经建立航迹的目标中的哪一个目标。工程上常用波门选通的方式实现航迹点迹配对矩阵的初步生成,其以航迹的预测值为中心,通过设置相关波门(跟踪门),当点迹以一定的概率落入波门内,则建立航迹与点迹的配对关系,波门选通判别具体如式(1)所示[3]:
(1)
当所有点迹利用相关波门遍历完,此时生成该航迹与相关点迹的配对矩阵。可以看出,利用波门选通实际上只是应用了位置级信息的数据关联,这是因为相关波门是基于航迹目标的新息协方差获取,而新息协方差矩阵只考虑了航迹预测值与观测值之间距离的因素,速度、航向等信息没有充分考虑,在低信噪比下或杂波密集区域,关联波门内会出现多个虚警点迹,导致后续跟踪质量下降。因此,需要引入速度等要素信息对航迹点迹配对矩阵进行进一步的判断和优化。
1.2 速度方差判别处理
依据初步航迹点迹配对矩阵,依次调出与航迹已相关上的点迹,分别计算关联点迹与上一周期航迹滤波值之间的空间距离和时间差,获得航迹关联该点迹时的瞬时速度Vss,计算公式见式(2)所示;依据航迹速度方差,结合量测噪声在不同距离段引起的速度变化,获得修正后的速度方差统计Vvar_lim,计算公式见式(3)所示;计算瞬时速度Vss与航迹速度均值Vave的差值,计算该差值与修正后的速度方差统计Vvar_lim的比值gv,计算公式见式(4)所示,若比值小于门限值gv_lim(依据大数定理,推荐取3),则该点迹通过速度一致性判别,该点迹属性为“高质量点迹”,否则该点迹属性为“一般质量点迹”;航迹相关点迹组中若有属性为“高质量点迹”,此时只保留“高质量点迹”,其余类型的点迹从相关点迹组中予以删除,完成航迹与低质量点迹配对关系的解耦;航迹相关点迹组中若没有属性为“高质量点迹”,此时存在的相关点迹只有“一般质量点迹”类型,此时剩余“一般质量点迹”都予以保存,不更新航迹点迹配对结果。
经过上述处理,航迹点迹配对矩阵得到充分的解耦,排除了由于速度异常点迹对航迹相关的影响,而且各航迹相关点迹组中的点迹类型是一致的(“高质量点迹”或“一般质量点迹”),对于“高质量点迹”属性的相关点迹,此时利用NNF法选择统计距离最近的点迹作为本周期的航迹更新点迹;对于“一般质量点迹”属性的点迹组,此时有两种可能,一种是航迹发生大的机动,导致速度一致性不满足,另一种可能是本周期没有扫描到目标更新点迹,而把杂波点关联进来。因此,在此条件下,由于关联点迹质量不高,航迹内部需要产生分支,一个分支是以航迹预测值作为本次航迹更新点迹,另一个分支是利用已有“一般质量点迹”作为航迹更新点迹,并等待后续周期处理确认。具体处理流程见图1所示。
1)关联点迹瞬时速度:
(2)
2)速度方差修正值:
(3)
3)速度一致性比:
(4)
4)航迹速度均值:
(5)
5)航迹速度方差:
(6)
其中:xm,ym,zm是关联点迹三轴位置量;xs,ys,zs是航迹三轴位置量;ΔT是关联点迹与航迹时间差;Rm是关联点迹距离;ΔA、ΔE分别是雷达方位和俯仰的测量精度;Vi表示i时刻的滤波速度;Vave_n表示n时刻速度均值;Vvar_n表示n时刻速度方差。
1.3 速度方差统计更新
利用更新点迹对航迹进行平滑、外推,获得目标位置、速度的更新滤波估值[4],在此基础上,完成航迹速度均值和方差的统计更新,为后续相关服务。为了便于计算机递归处理,工程上航迹速度均值和方差的统计更新通常采用迭代方式实现,其同式(5)和式(6)是完全等价的,速度均值Vave_n+1和方差Vvar_n+1的迭代公式具体见式(7)和式(8)所示。
(7)

(8)
其中:Vn+1表示第n+1时刻的滤波速度;Vave_n表示n时刻得到的速度均值;Vvar_n表示n时刻得到的速度方差;Vave_n+1表示n+1时刻得到的速度均值;Vvar_n+1表示n+1时刻速度方差。
2 系统设计
雷达数据处理是依据点迹位置参数和已有航迹运动参数,进行的互联、跟踪、滤波、平滑、预测等运算,完成对雷达测量数据进行互联、跟踪、滤波、平滑、预测等处理,可以有效地抑制测量过程中引入的随机噪声,精确估计目标位置和有关的运动参数(如速度和加速度等),预测目标下一时刻的位置,并形成稳定的目标航迹。
2.1 软件设计与实现
雷达数据处理主要包括点迹凝聚、航迹处理、数据交互三大功能模块[5]。其中,点迹凝聚模块完成对雷达信号处理送来的原始一次点迹进行存储,对符合凝聚条件的原始一次点迹按照采用线性加权求重心的方法进行凝聚;航迹处理功能模块是数据处理器的核心,它将凝聚点迹经过一系列处理,形成航迹,同时剔除杂波干扰,主要包含以下子功能模块:杂波剔除、航迹建立、航迹批号管理、航迹相关、航迹更新。各个功能子模块功能独立,在时间上是顺序执行;数据交互功能模块主要是实现数据处理软件的信息接收和发送,主要包括接收原始一次点迹及码盘信息,上报凝聚点迹信息、航迹信息。具体功能描述见表1所示,处理流程图见图2所示。

表1 功能描述
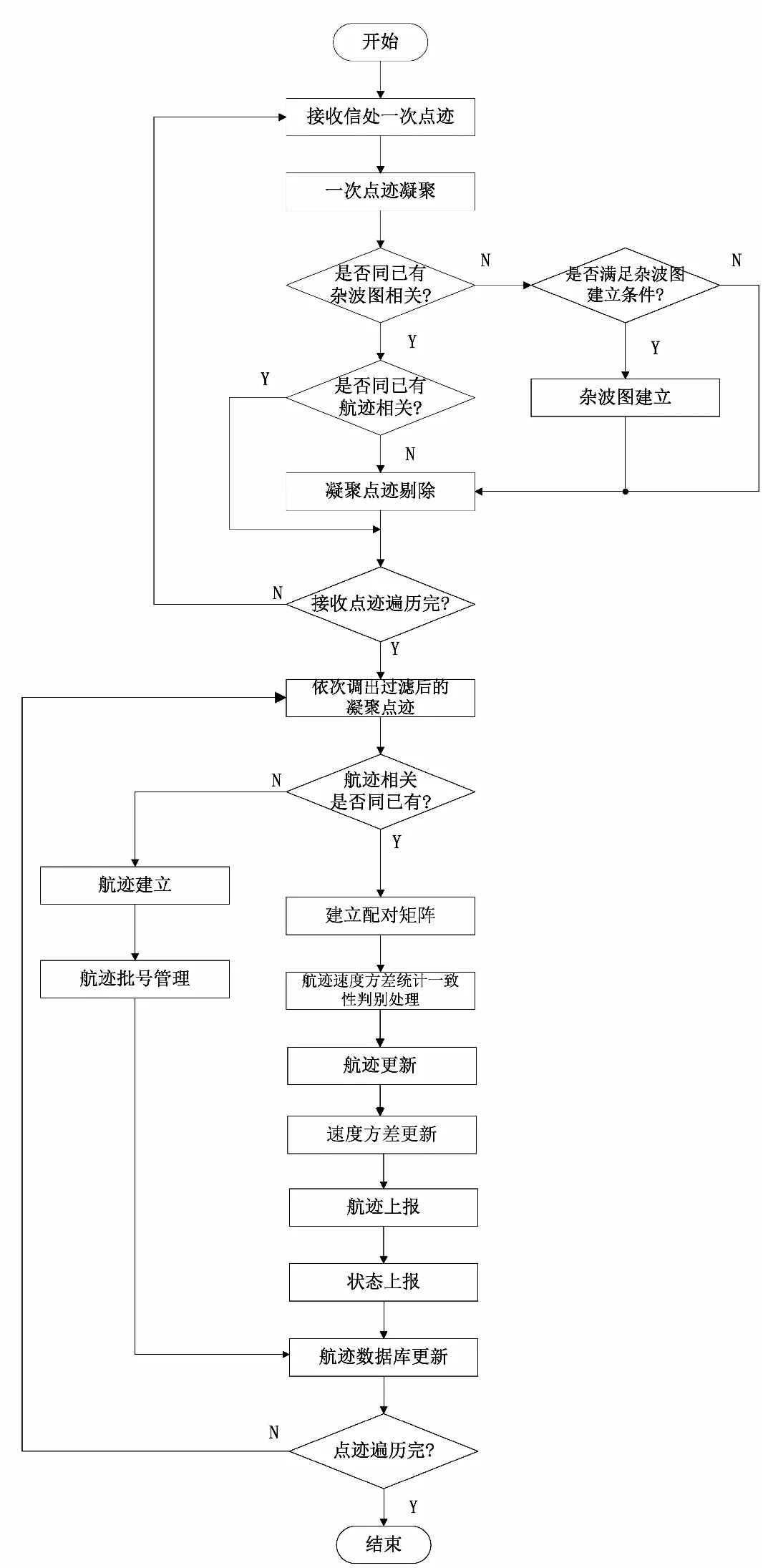
图2 雷达数据处理流程图
2.2 系统验证
应用该方法雷达目标跟踪处理改善效果如图3所示,可以看出,在已有航迹点迹相关中增加了基于航迹速度方差判别处理,优化后虚假航迹明显减少(由原来19条降低到3条),而且避免了由于误关联造成的航迹中断,有效提升了航迹点迹相关处理的置信度和目标稳定跟踪的能力。

图3 目标跟踪处理提升(优化前后)效果图
3 结束语
本文针对复杂态势环境下对航迹关联处理存在的不足之处,结合雷达数据处理工程实际,在现有航迹关联算法的基础上,提出了基于航迹速度方差判别处理方法,有效降低了虚假点迹对航迹关联的影响,提升了航迹点迹相关处理的置信度,实现了复杂态势环境下对目标稳定跟踪处理,具有较高的工程应用价值。
