基于PID控制的防抱死制动系统实现研究
2023-10-12吕怿萌
吕怿萌
(烟台汽车工程职业学院,信息与控制工程系,山东,烟台 265500)
0 引言
随着我国经济的飞速发展,人们的整体经济水平处于递增趋势,该现象使人们对生活质量的要求逐渐提高,并采用汽车代替传统的出行方式。但是汽车在行驶过程中易出现抱死现象,严重威胁着人类的生命安全以及财产经济,如何避免汽车防抱死现象的发生成为亟待解决的问题。汽车防抱死制动系统是一种科学有效的车用主动安全性部件,将该系统应用于汽车的紧急制动中,可有效消除汽车在制动过程中产生的不稳定因素。为此,本文利用PID控制建立防抱死制动系统,该系统可有效提高汽车的行车安全。
1 防抱死制动系统基本组成
汽车防抱死制动系统(ABS)包括气压和液压两种形式,不同形式ABS之间的差异性可体现在制动压力方面,汽车防抱死制动系统在调整制动压力过程中,充分结合不同形式的ABS,采取了不同的制动方案。不同形式汽车防抱死制动系统的基本组成单元存在一定相似性,该系统由传感器、电子控制单元以及制动压力调节单元共同组成。
1.1 轮速/车速传感器
汽车防抱死控制过程中最重要的两个参数为轮速和车速,该参数可通过车载电子传感器进行实时获取。车速传感器只能应用于少数高端车辆中,产生该现象的主要原因为由于车速传感器对精准度的要求较高,将该传感器安装在汽车内部时,无法实现汽车车速的精准测量,并且该传感器在完成车速的测量过程中需要花费较高的成本。当前大部分车辆在安装汽车防抱死制动系统时,仅采用轮速传感器完成汽车轮速的获取,再经过相应的手段计算出汽车的车速,以此实现汽车的防抱死制动控制。
1.2 电子控制单元(ECU)
该部分为汽车防抱死制动系统的核心单元,电子控制单元可充分利用传感器上传的数据信息,计算出汽车车轮的运动状态,同时可实时获取汽车的抱死倾向。为保证汽车动力输出 的最大化以及汽车车轮的滚动状态,结合计算结果对汽车防抱死制动系统的制动策略进行调整,并将制动力施加在汽车轮毂[1]。
通常情况下,电子控制单元内部包含16位单片机,该单元为实现汽车的防抱死制动控制,使自身具有极强的计算能力,同时内部带有冗余备份,有利于提升电子控制单元的工作可靠性和处于速率。
1.3 制动压力调节单元
该单元为汽车防抱死制动系统的关键部分,将该单元应用于汽车防抱死制动系统中,可实现信号变化到制动压力变化的转变,为汽车防抱死制动系统的执行机构。汽车防抱死制动系统可通过对制动液的流和制动气室气体的压力进行调整,以此实现汽车制动力大小的调节,有利于提高汽车的稳定性。
2 防抱死制动系统模型构建
为实现汽车的防抱死制动,构建出防抱死制动系统模型。当前车辆行驶状况仿真模型的常见类型包括单轮、双轮、四轮以及一般车辆模型,四种不同类型的仿真模型之间存在一定关系。其中一般车辆模型将整车运动情况作为主要研究对象,可实现整车运动情况的完全模拟,该模型具有精度高、功能全面等特点。但该模型在实际应用过程存在复杂程度过高的问题,更适用于车辆的整体设计或者整车行驶情况的评估。四轮车辆模型可在一般车辆模型的基础上建立,忽略一般车辆模型在实际应用过程中存在的影响因素,将一般车辆模型的车体部分作为质心,即可构建四轮车辆模型。四轮车辆模型可用于车辆运动特性的描述。而双轮车辆模型主要在四轮车辆模型的基础上构建,在实际应用过程中可将汽车的左右两轮合并成一个车轮,该情况下的四轮车辆模型等同于摩托车模型,可适用于直线驱动、载荷转移等问题的模拟。单轮车辆模型将车辆的制动性能作为主要分析对象,可研究汽车单轮的制动工况,该模型的建造过程较为简单,可适用于ABS的建模分析。
2.1 单轮车辆制动系统数学模型
本研究对该模型进行设计时,为提升汽车的防抱死制动效果,将汽车的1/4作为主要研究对象,建立了合理有效、简单适用的单轮车辆制动系统数据模型,该模型可符合系统的精度要求。为更好地突出单轮车辆制动系统数学模型的研究重点,在建立模型之前,提出多个假设条件:假设汽车车身和底盘与运载物体之间的连接关系为刚性;汽车轮胎的属性为刚性,并且该轮胎无任何形状的改变;汽车行驶过程中经过路面均为平整状态,不存在任何颠簸的现象;车辆行驶方向为无侧向、偏转的直线;汽车车轮半径在制动过程中无任何形状的改变;车轮无陀螺效应的发生[2]。
基于上述假设条件,本文完成了1/4模型的简化,单轮车辆制动系统数学模型如图1所示。

图1 单轮车辆制动系统数学模型
采用单轮车辆制动系统数学模型对汽车进行防抱死制动控制时,将模型车体的行驶方向和齿轮绕主轴方向作为核心自由度,在此基础上完成动力学方程的建立,并将牛顿定律和达朗伯原理作为主要依据,可得到车辆的运动方程:
(1)
汽车车轮的运动方程为
(2)
车轮的纵向摩擦力公式为
Ft=Nμ
(3)
式(1)~式(3)中,M代表的含义为汽车车体的总质量(kg),V代表的含义为汽车车轮的中心速度(m/s),Fx代表的含义为汽车车轮在行驶过程中受到的纵向阻力(N),Fa代表的含义为汽车车轮在行驶过程中受到的空气动力学阻力(N),I代表的含义为汽车车轮的转动惯量(kg·m2),ω代表的含义为汽车车轮的角速度(rad/s),Ft=Fx代表的含义为轮胎与地面之间产生的附着力(N),Ff代表的含义为车轮的滚动阻力(N),Tb代表的含义为制动力矩(N·m),R代表的含义为汽车车轮的有效半径(m),N代表的含义为汽车车轮对地面施加的法向反力(N),μ代表的含义为汽车车轮与地面之间的附着系数[3]。
Fa为汽车1/4车体在行驶过程中受到的空气动力学阻力,其公式为
(4)
式中,ρ代表的含义为空气的密度(kg/m3),Cd代表的含义为空气动力阻碍系数,Adx代表的含义为汽车对空气阻力的受力面积(m2)。
本研究对汽车车轮的滚动阻力进行计算时,其计算公式为
Ff=f0+3.24fs(Kmph×v)2.5
(5)
式中,f0代表的含义为基础系数,fs代表的含义为速度影响系数,Kmph代表的含义为比例因子。
2.2 车轮轮胎模型
轮胎实际上是一种复杂黏弹性的结构,该结构具有非线性特性。学者将轮胎模型作为主要研究对象,对该模型进行深入研究,并取得了一些成果。常见的轮胎模型可划分为三大类:其一,将轮胎试验数据作为主要依据,以此建立可描述轮胎侧偏特性的模型,例如Magic Formula模型;其二,对轮胎与路面之间的关系以及作用机理进行深入研究,研究得出的理论基础可为模型提供理论支撑,例如Fiala模型、Gim模型等;其三,将试验数据作为核心,拟合出相应的理论模型,通过对模型的参数和理论充分结合,以此构建出半经验模型,例如MF-Tyre模型。
通过对上述模型进行分析可知,理论模型的精度较低,但该模型在实际应用过程中,无需进行试验数据的拟合。经验模型和半经验模型的精度远高于理论模型的精度,但经验模型和半经验模型在实际应用过程中,均需进行试验数据的拟合。不同类型的模型适用的领域存在差异性,由于车轮轮胎模型在仿真过程中需要重复调用。因此,本文在选用模型时,应充分考虑模型的计算效率与精度。本文对该模型进行设计时,选用Pacejka HB的魔术轮胎模型作为该模型的设计基础,有利于提高计算的效率和精度[4]。在Magic Formula魔术公式的基础上,设计车轮轮胎模型。对汽车进行防抱死制动时,汽车车轮的滑移率和纵向附着系数之间的函数关系为
μ(λ)=f+Dsin{C·arctan[B·λ-
E(B·λ-arctan(B·λ)]}
(6)
式中,f代表的含义为轮胎的静摩擦系数,D代表的含义为峰值因子,B为刚度因子,C代表的含义为曲线形状因子,E代表的含义为曲线曲率因子,λ代表的含义为滑移率,μ代表的含义为纵向附着系数。
2.3 制动系统模型
本文对汽车制动系统的模型进行构建时,选用液压式制动系统作为研究对象。制动器包含3种状态,不同的状态均可与液压控制阀的不同位置之间进行对应。当制动器的回油路处于相通状态时,制动缸为减压模式;当控制阀处于关闭状态时,制动缸为保压模式;当制动器的油源与轮缸接通时,制动缸为增压保压模式[5]。
假定油源的压力为常数,油源进入制动缸的流量Q公式为
(7)
式中,A代表的含义为控制阀的过流面积,Cd代表的含义为控制阀的流量系数,ρ代表的含义为油液密度,P代表的含义为制动缸压力,Ps代表的含义为油源压力。
对活塞的运动速度进行计算时,可忽略油液的可压缩性,其公式为
(8)
式中,AP代表的含义为油缸作用面积。油液被压缩的变化率公式为
(9)
式中,βe代表的含义为油液体积的弹性模量,VD代表的含义为油缸和管路的容积。通过对式(5)~式(7)进行整理,可得到的公式为
(10)
(11)
若忽略系统受非线性因素和温度因素的影响,可将制动力矩Tb看作制动压力P的线性函数:
Tb=(P-Pout)AwcηBFrr
(12)
式中,Pout为推出压力,Awc代表的含义为轮缸面积,η代表的含义为机械效率,BF代表的含义为制动因子,rr代表的含义为有效转子半径[6]。
通过对式(10)进行简化可得到:
(13)
为实现制动力的调节,本文对制动系统进行设计时,将控制器的电磁阀指令作为主要依据,并对控制器进行保压、减压、增压等操作,使汽车车轮的滑移率维持在最佳值。
3 PID控制基本原理
3.1 PID控制基本原理
PID控制与逻辑门限值控制之间存在一致性,在实际控制过程中均不依赖汽车防抱死制动系统的数学模型,并且该控制方式的原理较为简单,可在不受任何应用场合限制的情况下,实现汽车的防抱死控制,具有生命周期长、可靠性高等特征。
PID控制内部控制量u和误差e之间的传递函数公式为
(14)
式中,U(s)代表的含义为控制量u的拉氏变换,E(s)代表的含义为误差e的拉氏变换,KP代表的含义为比例(P)系数,Ki代表的含义为积分(I)系数,Kd代表的含义为微分(D)系数[7]。
在PID控系统制中,控制量u主要由误差e的比例、积分、微分等分量经过线性组合而形成的,3个分量对汽车防抱死制动系统均含有调节作用,不同分量的调节作用各不相同。对误差e进行计算时,可预先计算出给定值r(t)和实际值y(t),二者之间的差即为误差值。PID控制结构如图2所示。
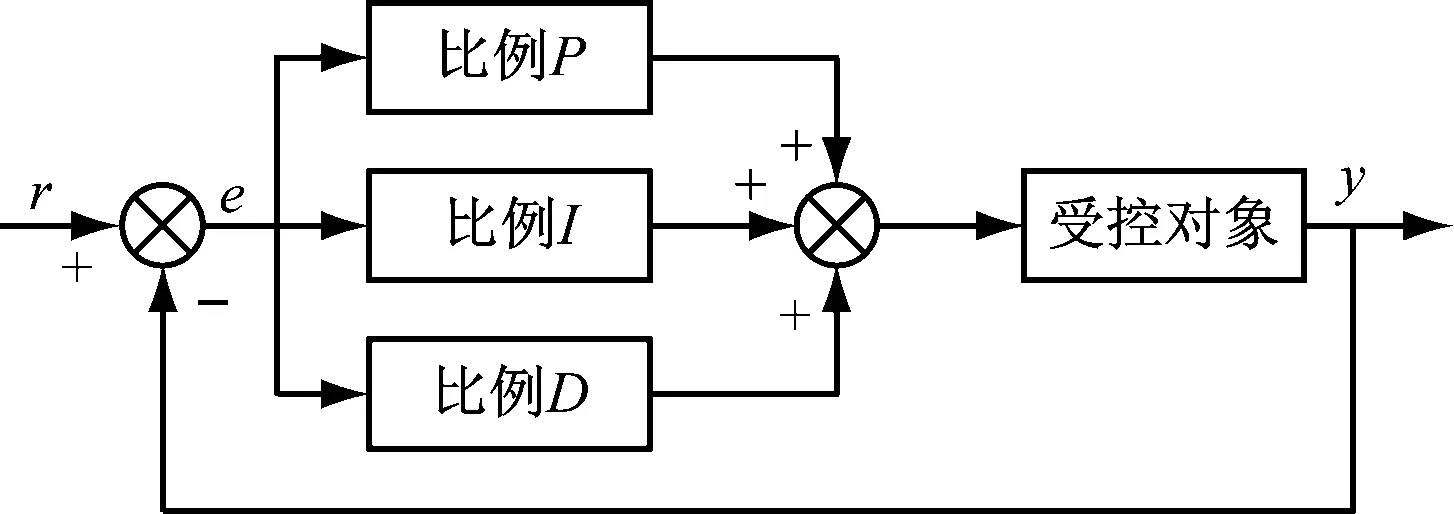
图2 PID控制结构图
本文为了后期对系统进行仿真设计,对PID控制律进行离散化,其公式为
(15)
式中,u代表的含义为控制量,e代表的含义为误差数值,u0代表的含义为控制量初值,KP代表的含义为比例积分系数,Ti代表的含义为积分时间常数,Td代表的含义为微分时间常数,T代表的含义为采样周期。
当采样周期的取值处于较小状态时,即可达到系统的控制精度。采用数字式PID对系统进行控制时,可利用递增式算法对其进行计算,其公式为
Δu(k)=u(k)-u(k-1)=Kp[e(k)-e(k-1)]+
Kie(k)+Kd[e(k)-2e(k-1)+e(k-2)]
(16)

3.2 PID控制参数
本文对PID控制器的参数进行设计时,将滑移率控制的基本原理作为主要依据,制定出PID控制策略。该控制策略的具体内容为:当滑移率大部分曲线位于I区时,防抱死制动系统存在较大误差,并且该系统的响应速度较慢,为适当地加快防抱死制动系统的响应速度,并最大限度地减小防抱死制动系统的误差现象,可增大Kp、减小Kd;当滑移率大部分曲线位于Ⅱ区时,防抱死制动系统无法精准控制车辆,为提高系统的稳定性,可适当地抑制超调,增大Kd、减小Kp;当滑移率大部分曲线位于Ⅲ区时,防抱死制动系统可精准控制车辆,为取得更好的控制效果,可在保证Kd和Kp处于稳定状态时,对Ki进行调节。通过PID控制策略,可对高、中、低三种不同附着系数的路面进行整定,整定过程中获取的参数可用于仿真。防抱死制动系统输出响应曲线如图3所示。
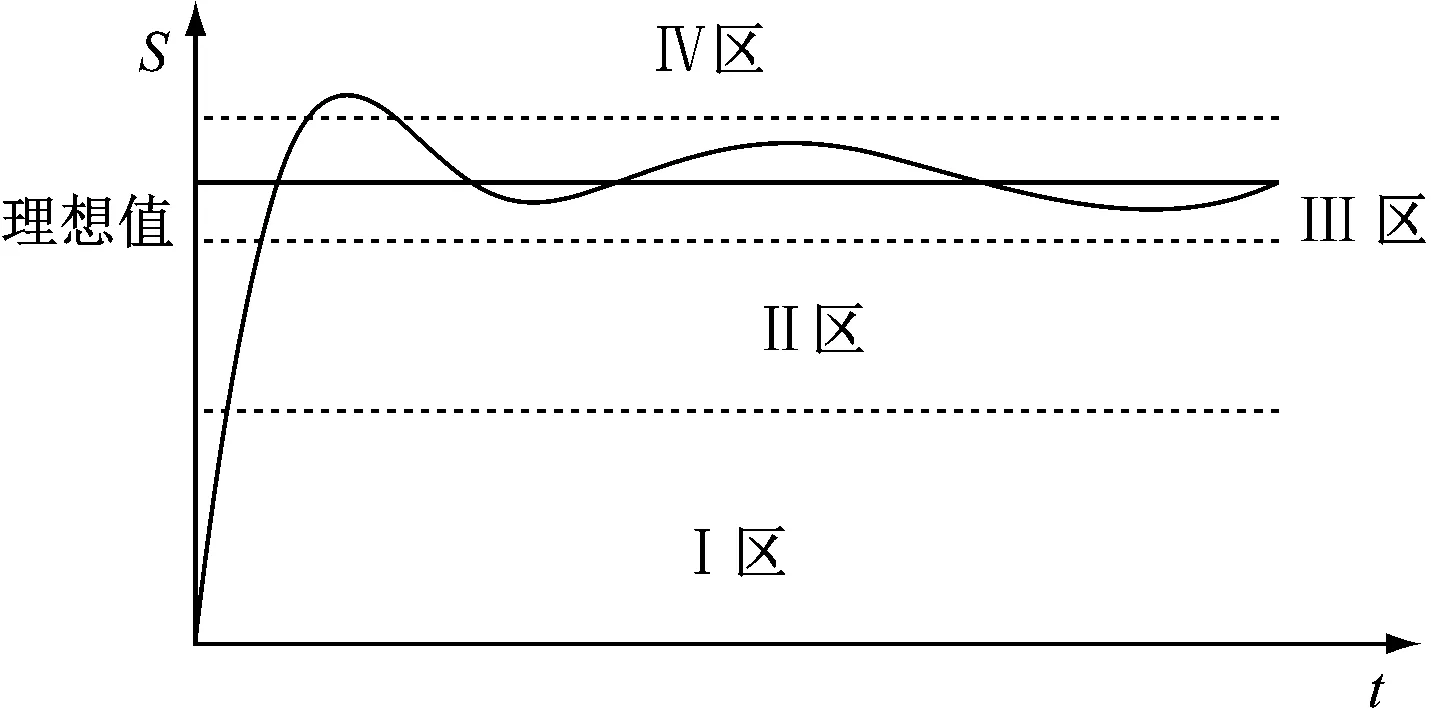
图3 防抱死制动系统输出响应曲线
PID控制器设计的目的是为了实现P、I、D参数的整定,对参数进行整定时,可采用试凑法作为参数整定的核心方法。试凑法整定过程:首先,为初步达到控制车辆的目标,对参数的比例进行整定;其次,对积分和微分两部分进行整定;最后,调整防抱死制动系统的超调、稳定性以及响应速度等,通过系统的参数进行反复修改,最终得到满意的效果。PID控制参数如表1所示。

表1 PID控制参数
4 基于PID控制的防抱死制动系统制动仿真
本文为验证ABS系统的有效性,将逻辑门限值作为ABS系统的核心算法,在该算法的基础上完成ABS控制器的建立,并在相同条件下对处于湿沥青路面的ABS系统的制动过程进行仿真。为简化系统仿真过程,采用单门限控制逻辑完成系统仿真,将最佳参考滑移率作为ABS系统的控制门限,以此实现对系统的调节。基于PID控制的防抱死制动系统控制逻辑如图4所示[8]。

图4 基于PID控制的防抱死制动系统控制逻辑
图中湿沥青路面对应的λmin=0.1108,λmax=0.1508,最佳滑移率的参考值为λR=0.1308。逻辑门限控制的ABS制动仿真曲线如图5所示。
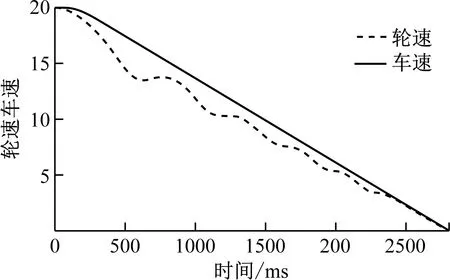
(a) 轮速随车速的变化趋势
通过对逻辑门限控制的仿真结果进行分析可知,该算法可有效进行ABS控制,在汽车进行制动过程中汽车的车轮可随着车速的变化而变化,并且汽车车轮为发生抱死现象,较好地实现了制动控制。
5 总结
本文为提升汽车的防抱死制动效果,将汽车的1/4作为主要研究对象,建立了合理有效、简单适用的单轮车辆制动系统数据模型,该模型可符合系统的精度要求。为实现制动力的调节,本研究对制动系统进行设计时,将控制器的电磁阀指令作为主要依据,并对控制器进行保压、减压、增压等操作,使汽车车轮的滑移率维持在最佳值。为验证ABS系统的有效性,将逻辑门限值作为ABS系统的核心算法,在该算法的基础上完成ABS控制器的建立,并在相同条件下对处于湿沥青路面的ABS系统的制动过程进行仿真。逻辑门限控制的仿真结果表明,该系统可实现汽车的防抱死制动,并且在测试过程中汽车车轮未发生抱死现象,较好地实现了汽车的制动控制。
