一种机械仿生鸭设计
2023-10-12李建,叶艳
李 建,叶 艳
(1.景德镇学院 机械电子工程学院,江西 景德镇 333400;2.景德镇二中,江西 景德镇 333000)
0 引言
随着仿生技术的发展,仿生机械已从传统的纯机械式向智能化转变,其特点主要体现在执行任务的多样化、完成动作的仿形化、控制水平的精确化等,这有利于产品更加合理地模仿生物所具备的生理机能,可安全、精准、高效地完成任务[1]。外形与所模仿生物的高度相似性,也是仿生机械的特点之一,这有助于其在侦察、掩护等应用场景更加隐蔽、安全地完成任务[2-3]。目前,仿生机械的使用场景逐渐趋向于大众化,这种需求对其结构及性能提出了更高的要求。将驱动装置、传动装置、传感器、控制板和电源等部件进行高度集成,可提升仿生机械的整体协调及稳定性,并能最大程度地实现产品低成本的批量生产[4-5]。
本文结合仿生机械在现实生活中的应用,设计一款仿生鸭,模仿鸭子在水中游动,通过控制器实现对仿生鸭的速度及方向进行连续控制,使其能在一定的水上区域活动,实现其外形、运动等方面的仿生化。从应用角度看,仿生鸭在外表上具有生物的自然元素,可作为公园景观为环境添加点缀;也能以其逼真的外形、操纵的娱乐性等作为儿童玩具;还能用于水上作业,如在鸭尾装上挂钩器,实现布网,为渔业提供生产力;装上探测仪,还可用于探测水中的污染物,了解河水的污染分布区块等[6-7]。该产品具有一定的应用前景。
1 总体方案设计
仿生鸭外形尺寸长35 cm,宽15 cm,高15 cm,由树脂材料制作而成,设计前进最大速度15 km/h,其结构包括鸭身、舱盖、盖扣、吊舱、灯眼、蓄电池、电机、舵机、传动轴、拉杆、螺旋桨、尾舵等。采用电机带动螺旋桨驱动鸭体向前行驶,利用舵机控制转向。由无线信号对电机和舵机进行控制,以实现速度和转向的控制,控制距离不小于100 m。
为了实现仿生鸭子在水面的游动功能,该装置设计由以下部分构成:
(1)仿生鸭体:包括鸭身、舱盖、盖扣、吊舱、灯眼等。
(2)动力及传动装置:包括电池、电机、传动轴、螺旋桨等。
(3)方向控制机构:包括舵机、拉杆、拉杆密封件、尾舵等组成。
(4)控制器:包括信号发生器、信号接收器等。
2 仿生鸭体设计
仿生鸭体由鸭身、鸭舱、舱盖、盖扣、吊舱、灯眼等组成。鸭身外形长35 cm,宽15 cm,高15 cm。鸭体内部为鸭舱,是一个空腔,用于安装电池、电机、舵机等驱动及控制部件等,并能确保整体在浮力的作用下浮于水面并保持稳定。鸭舱上部设计一舱盖,用于对鸭舱进行密封。在鸭舱尾部设计一个盖扣,用于加强对舱盖的固定。在鸭身底部设有吊舱,主要作用是配重,提升行驶的平衡稳定性。鸭身左右眼部各设一个发光二极管,在通电后发光,主要用于装饰美化、娱乐等功能。
仿生鸭体采用吹塑工艺制作,其原理是热塑性树脂经挤出或注射成型得到的塑料型坯,加热到软化状态置于对开模中,闭模后立即在型坯内通入压缩空气,使塑料型坯吹胀而紧贴在模具内壁上,再经冷却脱模,即得到制品。加工过程如下:首先,中空塑料管挤出原料。沿预设纵向延伸的吹塑喷嘴,将气体介质施加到塑料型胚上以使其膨胀。将气体介质通过连接管道输送到吹塑成型设备的连接装置,从介质的流动方向观察控制块,其在连接装置和吹塑活塞之间,在膨胀过程中控制压力实现输送。其次,模具闭合,夹紧模具并切断型胚。另外,调整开口并在冷却期间保持一定的压力,打开模具,卸下被吹得零件。最后,修整飞边得到成品。将吹塑制品冷冻,同时滚去飞边,自然升温至室温取出即可。由于低温,塑料的韧性大幅下降,变为脆硬状态,此时飞边处强度低,容易在碰撞中脱落,因而达到修整目的。
鸭身及舱盖结构如图1、图2所示:

图1 鸭身结构形状图

图2 舱盖结构形状图
2 动力及传动装置设计
仿生鸭动力装置主要用于提供鸭体前进所需能量和动力,包括电池、电机、传动组件、螺旋桨等。
为使前进最大速度达到15 km/h,保证一次充电使用时间15 min以上,选用7.4 V、700 mA·h锂离子电池为储能元件。其正极材料为钴酸锂,负极材料为碳材,电池通过正极的锂离子在负极碳材键入与迁出实现电池的充放电。锂离子电池能量密度大,平均输出电压高,单体的工作电压可达3.7~3.8 V,自放电小,室温下充满电月自放电率约2%,低于Ni-Cd的25%~30%,Ni-MH的30%~35%。没有记忆效应,工作温度范围宽,在-20℃~60℃,循环性能优越,可快速充放电,输出功率大,使用寿命长[8-9]。选用180微型直流电机作为驱动元件,其传动效率较高,达到相同的输出功率,其体积比较小,对于安装位置有限的情况下,选用该电机比较合适。并且,电机可以根据负载大小,自动降速,来达到较大的起动力矩,其还能较容易吸收负载大小的突变,转速可以自动适应负载大小[10-11]。电机主要含定子和转子两部分,定子包括主磁极、机座、换向极、电刷等。转子包括电枢铁芯、电枢绕组、换向器轴、风扇等。直流电源供给的电流方向不变,电枢一经转动,由于换向器配合电刷对电流的换向作用,保证了每个极下线圈边中的电流始终是一个方向,从而形成一种方向不变的转矩,使电动机能连续地旋转。电机额定电压7.2 V,额定电流0.48 A,额定转速为100400 r/min、最大扭矩42.4 N·m,其性能稳定,动力能够满足要求。
电机轴通过联轴器与单花轴相连,单花轴尾部连接螺旋桨,用螺母轴向定位,防止其轴向移动。单花轴外部有套管,并从鸭身尾部穿过,为防止漏水,轴套和鸭身用热熔胶密封,其连接如图3所示。

图3 传动系统结构图
4 方向控制机构设计
方向控制机构设计由舵机、舵机拉杆、拉杆密封件、尾舵等组成,实现仿生鸭换向功能。
舵机是一种带有反馈环节的伺服电机,体积紧凑,便于安装,输出力矩大,稳定性好[11]。其主要由直流电机、舵盘、减速齿轮组、位置反馈电位计、控制板等组成。控制板接收来自信号线的控制信号,控制电机转动,电机带动齿轮组减速后传动至输出舵盘。舵机作为一种位置伺服的驱动器,其输出轴和位置反馈电位计相连,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈。控制电路板根据其所在位置决定电机的转动方向和速度,直至达到目标停止。舵机的控制信号是周期为20 ms的PWM信号,脉冲宽度0.5 ms~2.5 ms,相对应舵盘的位置为0°~180°,呈线性变化。当输入一定的脉宽,输出轴就会保持在一个相对应的角度,直到提供一个另外宽度的脉冲信号。舵机内部有一个基准电路,产生周期20 ms,宽度1.5 ms的基准信号,另有一个比较器,将外加信号与基准信号相比较,判断出方向和大小,从而产生电机的转动信号。
转向拉杆一端钩于舵机转子孔上,顺着另一边从鸭身尾部穿出。穿孔处粘合一密封橡胶圈,以防漏水。螺旋桨上方固定一转向翼座,在转向翼左侧开一个小孔,与舵机拉杆的另一头连接。舵机、拉杆、转向翼构成一曲柄摇杆机构,其连接如图4所示。

图4 方向控制机构结构图
5 控制器设计
电机内部的电控单元主要由51单片机进行控制,其控制系统传递线路如图5所示:
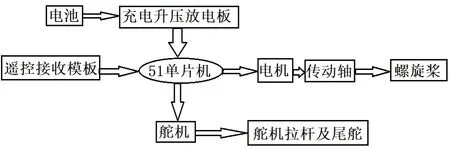
图5 控制系统传递线路图
该系统通过高频2.4G无线遥控,使用的是STC12C5A60S2单片机,用NRF24L01作为收发模块。电路的主要制作元件包括12 M晶振一个、30 p陶瓷电容一个、AMS117 3.3和AMS1117 5.0稳压芯片各一个、NRF24L01模块一个、摇杆电位器一个、10 K及20 K电阻(1%精度)、按键7个、100 uf 16 V电容三个、104瓷片电容一个、耳机插座(用于输入输出PPM模拟信号)一个、蜂鸣器一个、二段开关三个、三段开关二个、电位器(旋钮开关)三个。
当接收到遥控器传来的无线信号,控制器将其转变为电流信号传给舵机和电机。舵机旋转带动拉杆运动,控制尾舵局部摆动从而实现换向。电机带动单花轴,驱动尾部螺旋桨旋转。单片机能根据输入的正反转代码控制电机转向,因此,可带动螺旋桨顺时针或逆时针旋转,从而实现仿生鸭子的前进或后退功能。
6 性能测试
根据设计方案,将驱动、传动、控制等零件安装于仿生鸭体,其形状如图6所示。将仿生鸭放于水池中进行测试(如图7所示),其能较好实现水上运动,控制响应快,速度连续性较好,最高可达15km/h,并且转向操纵平稳,性能可靠,密封好,舱内无漏水,仿生鸭总体符合设计要求。
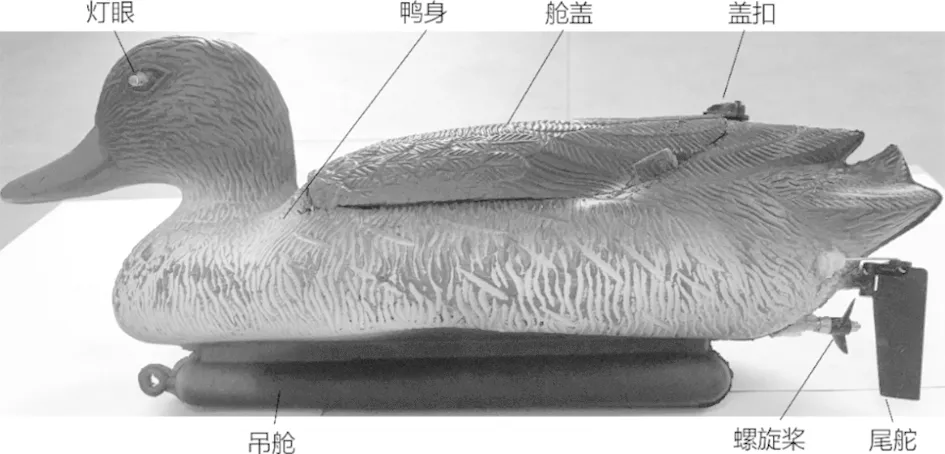
图6 仿生鸭外观图

图7 仿生鸭水上测试图
