基于按叩一体的柔性按摩执行器设计与仿真
2023-10-12张宏强郭家伟邵国庆刘永平
张宏强,郭家伟,王 佐,邵国庆,刘永平
(马鞍山学院,安徽 马鞍山 243100)
随着医疗领域的迅速发展与学科融合,尤其是与人工智能等新兴技术相结合,人们对按摩机器人的研发以及对其应用的探索在不断地深入和拓展。鲁守银等[1]阐述了中医按摩机器人按摩手法机理及建模、可靠性设计、安全保护机制以及未来需要重点研究的关键技术。
在按摩机器人执行器的设计中,胡磊[2]提出了串并联球型腕结构,实现按摩头的功能,这种结构不能实现叩击和滚压按摩的联合使用。焦成彬等[3]人通过复合形法对叩击按摩手结构的数学模型进行了优化处理,获得设计变量的最优解,这种按摩结构是基于叩击的设计方案,按摩方式单一。张禹等[4]人设计了由硅胶材料制成的气囊“触手”,能实现变刚度,这种结构对气密性要求较高,存在漏气隐患。郑小石[5]设计的按摩机械手结构通过推杆和直线导轨实现,但缺少按摩的柔性机构。
Phuc等[6]设计了由独立的并联机械手构成的串联链条与线性连接的执行机构一起组成按摩机器人,此机构只能实现平动的挤压按摩。Kang[7]设计了适用于冲击力控制的手臂机构,建立了机器人手臂的运动学和动力学模型,对冲击按摩时冲击力分布进行了实验,这种模型只是分析了冲击按摩,没有对滚压按摩进行研究。Koga等[8]人开发了一个为颌面区域提供按摩治疗的机器人,其中包含由两个6个自由度组成的臂与柱塞连接的末端执行器,这种柱塞末端执行器通过改变形状、材料等适应不同的按摩种类,需要经常更换,易用性较差。Sayapin[9]提出了三自由度三角形并联结构平面按摩机器人,其运动和操纵实验是由气动样机进行的,实现的是一个平动的按摩,另外气动样机也存在漏气的隐患。
按摩机器人在按摩过程中需要具备方式的多样性,按摩力度需适合人体组织的要求,另外柔性机构要安全可靠。研究者对按摩机器人的研发和使用中,存在按摩执行器的动作单一,或缺乏柔性结构,或柔性机构的可靠性需要提高,或易用性较差等问题,因此设计了一种按摩和叩击为一体的执行器,增加肌肉按摩的方式。另外设计了适合人体按摩力度的弹簧式柔性机构,能够缓冲按摩的冲击和力度,提高了按摩的可靠性和安全性,当超过适合人体的按摩力度后,通过力传感器输出信号到机器人输入端,机器人接收到此信号后会安全停止。在使用过程中执行器自动实现按叩的转换,易用性较好。
1 按摩执行器的应用场景
肩部、背部的滚压按摩目前在人们的生活中比较常见,大多数以手动为主,手动滚压按摩存在必须要有人协助才能完成的不便捷的问题,另外力度较硬,没有柔顺的缓冲装置,体验感不好;按摩路径较为凌乱,不具备连续性;按摩的力度没有可控性;手动滚压按摩的类型较为单一,只有滚压按摩一种。
为了解决以上问题,本文利用机器人与按叩一体的柔性按摩执行器组合共同完成自动的背部滚压按摩和叩击按摩。此按摩执行器存在两种工作状态,如图1所示,(a)为滚压按摩状态,通过按摩滚轮的滚动来实现按摩;(b)为叩击按摩状态,通过按摩滚轮以及其他辅助装置的叩击,即围绕旋转轴,以一定旋转角度往复运动,使按摩滚轮和人体需要按摩的位置接触,实现叩击按摩。

1.按摩机器人;2.按摩执行器;3.按摩对象;4.按摩执行器(叩击状态)
按叩一体按摩执行器的应用场景具体如图2所示。按摩对象坐在按摩定位座椅上,按叩一体按摩执行器被安装在六自由度小负载机器人末端法兰上,结合此机器人的运动完成所需按摩路径的移动,具体的功能由此执行器的各模块实现。

图2 按摩执行器与机器人的联合使用场景
为了能使按摩执行器实现按叩一体的功能,对其结构进行了特别的设计,并对设计的结构结合应用的条件进行仿真和校核,使其满足使用要求。
2 按叩一体按摩执行器的结构设计
柔性执行器的结构设计分为以下几个模块:柔性模块、滚压模块、叩击辅助模块、叩击动力模块、叩击锁定模块、力传感器模块、安全限位模块。
运用Solidworks对按叩一体按摩执行器的结构模块进行设计与分析,如图3所示,其各模块之间的工作原理为:滚压模块在借助按摩机器人的动作下完成滚压按摩功能,通过滚轮的往复滚动以及柔性模块、力传感器模块和安全限位模块的作用共同实现,其中柔性模块的作用是提供缓冲和柔性的按摩力,另外当按摩对象的肩背的初始位置不一致时,起到局部的前后调整作用;力传感器模块是在柔性模块的底部安置了力传感器,能够实时监控按摩力的大小,当超过按摩力的阈值时就会停止运动,为按摩对象提供安全保护;安全限位模块是当力传感器模块失效时,按压式限位开关实现最终安全保护,具备双重保护功能。
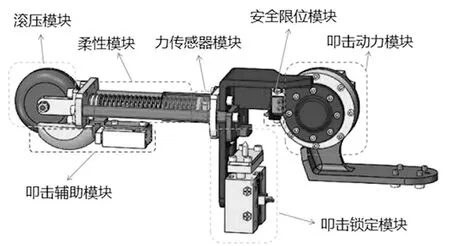
图3 按叩一体按摩执行器的结构模块设计三维图
通过叩击锁定模块的锁定实现由滚压功能转换为叩击功能,叩击锁定模块是由带导杆的气缸完成销和孔的配合锁定,带导杆的气缸能够承载较大的横向载荷,另外叩击辅助模块的两种执行状态也是通过带导杆的气缸实现的,气缸伸出为叩击功能状态,气缸退回为滚压功能状态。
2.1 结构模块的设计
如图4所示为柔性、滚压和叩击动力模块的二维结构图。

1.滚轮;2.无油衬套;3.支板;4.支撑板;5.导杆;6.压缩弹簧;7.支撑套筒;8.支撑盘;9.压力传感器;10.支撑底盘;11.无油衬套;12.支撑主板;13.挡板;14.限位传感器;15.连接板;16.谐波减速器;17.拉板;18.过渡轴;19.伺服电机
滚压按摩模块采用滚轮作为执行载体,通过机器人的运动完成所需的按摩,滚轮由无油衬套起到中间支撑和润滑作用,滚压按摩模块整体通过导杆在无油衬套中往复移动和导向压缩弹簧压缩或复原,压力传感器通过设置的力阈值保护按摩对象;挡板在压缩弹簧复原时限位,限位传感器提供最后限位保护。
叩击按摩的动力模块如图4右端所示,伺服电机带动输入轴把运动传递给谐波减速机,谐波减速机输出端带动叩击模块反复旋转完成叩击动作,这种传递方式刚性强、结构简单且造价低。
图5中为叩击辅助模块和叩击锁定模块。在叩击辅助模块中,叩击辅助气缸带动叩击按摩球伸出时,即为叩击辅助模块,叩击按摩球能够起到在叩击按摩时的缓冲作用(按摩球的材质软于滚轮),让按摩对象的体验感较好,力传感器检测到叩击按摩力超过最大阈值,信号会传递到机器人系统,整个按摩系统会停止。在叩击锁定模块中,当压缩弹簧在复原状态时,叩击锁定气缸带动锁定柱通过销孔配合与锁定孔锁定,此时柔性模块失效,滚压按摩状态转换为叩击按摩状态。
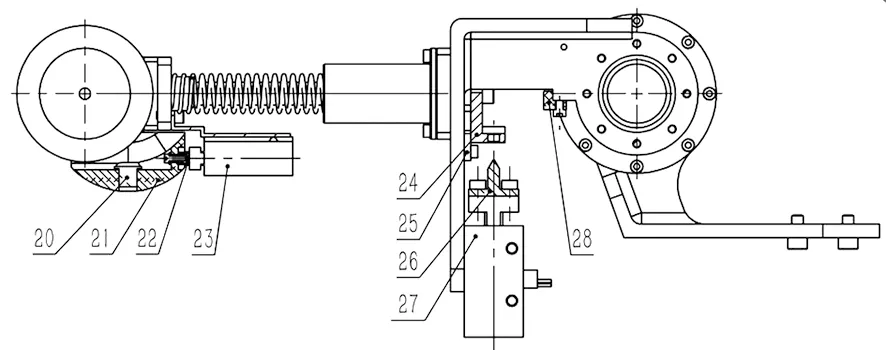
20.力传感器;21.叩击按摩球;22.连接器;23.叩击辅助气缸;24.锁定孔;25.拉伸限位块;26.锁定柱;27.叩击锁定气缸;28.压缩限位块
2.2 柔性模块的计算与分析
在柔性模块中,关键件主要是压缩弹簧与导杆。对压缩弹簧进行计算和设计;另外导杆是细长轴结构,在叩击按摩中按摩力对导杆的冲击较大,因此对导杆做有限元分析。
参照相关文献[4],此执行器主要是应用在肩部或背部,所以选取最小按摩力为20 N,选取最大按摩力为40 N,滚压按摩中,最小按摩力和最大按摩力分别为弹簧的最小工作载荷和最大工作载荷,压缩弹簧的设计计算参照文献[10],其中部分计算公式如下:
初定旋绕比C与曲度系数K:
式中K——曲度系数;C——旋绕比;τp——弹簧材料的许用应力;D——弹簧中径;pn——最大工作载荷;确定曲度系数K:
计算有效圈数n:
式中G——切变模量;d——材料直径;Fn——最大工作载荷下的变形量;
计算自由高度H0:
H0=Hb+Fb
(2-4)
式中H0——自由高度;Hb——材料直径;Fb——压并时变形量;
计算节距t:
根据前面参考资料可得,最小工作载荷p1即为最小按摩力,大小为20 N;最大工作载荷pn,即为最大按摩力,大小为40 N。根据使用工况,弹簧中径D定为16 mm,工作行程定为30 mm,弹簧材料为50 CrVA,经以上公式、其他公式计算和查阅相关表格最终计算得:初定旋绕比C0为10.9,初定曲度系数K0为1.132,进一步计算得:确定旋绕比C为10,确定曲度系数K为1.146,材料直径d=1.6 mm,弹簧刚度为0.6667 N/mm,最小工作载荷下的变形量为30 mm,最大工作载荷下的变形量为60 mm,有效圈数n为24圈,压并高度Hb为40.8 mm,自由高度H0为133.1077 mm,节距t为5.45 mm,其它参数不再一一列出,依据这些参数进行弹簧的设计和结构建模。
2.3 柔性模块导杆的有限元分析
由于导杆在柔性模块中起着非常关键的作用,所以有必要对其进行分析。对导杆进行有限元分析包括滚压按摩和叩击按摩的工况,前面所述,这两种按摩的按摩力最大都为40N,考虑到按摩对象的腰背轮廓对受力分析的影响,所以对滚压和叩击的受力分别简化为沿轴线方向的最大力F1(40N)和垂直于轴线方向90°的径向方向的最大力F2(40N),受力如图6所示。
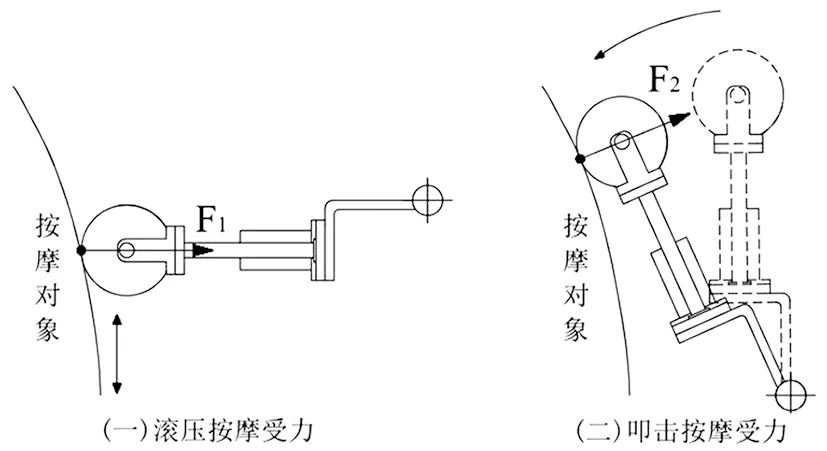
图6 两种工况下按摩力分布
根据以上两种工况下按摩力的分布,把轴向力F1和径向力F2同时加载到按摩执行器上进行有限元分析,导杆的材料为45号钢,对导杆添加约束以及受力如图7所示,进行网格划分如图8所示,在分析结果中应力图如图9所示,位移图如图10所示。
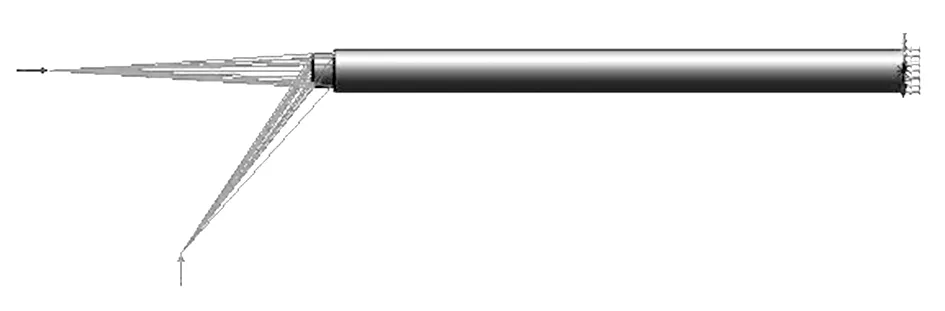
图7 导杆的约束以及受力施加
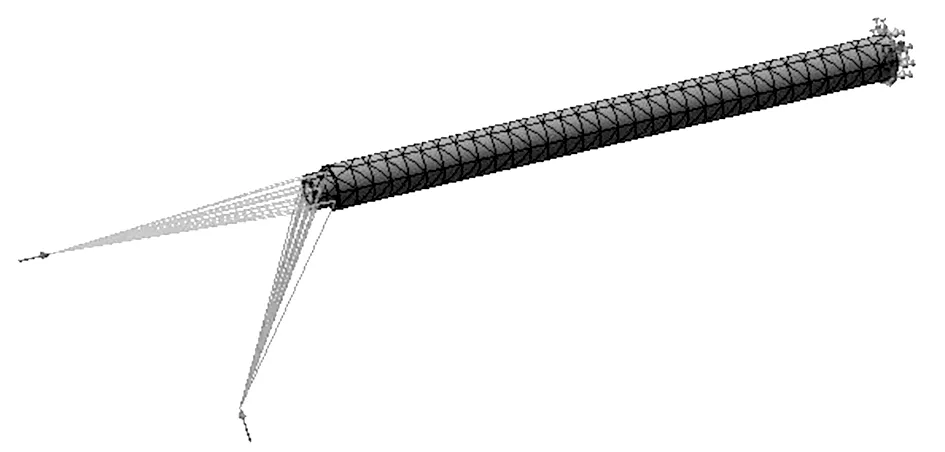
图8 导杆的网格划分

图9 应力分析图

图10 位移分析图
根据图9的应力分析可得,最大应力σmax为69.8 Mpa,导杆的材料为45号钢,屈服极限σs为355 Mpa,由于导杆是塑性材料,取安全系数为ns为2.5,得许用应力[σ]为142 Mpa(许用应力等于屈服极限除以安全系数),最终分析可得此导杆的屈服强度满足使用要求(最大应力σmax≤许用应力[σ])。由图10位移分析可得,最大位移为0.478 mm,根据设计要求最大位移需在1 mm以内,所以变形位移也满足设计要求。
3 按叩一体按摩执行器的动力学仿真
3.1 滚压按摩的柔性模块仿真
前面对滚压按摩模块中柔性机构进行了计算与设计,在一定行程下(30 mm),需要对设计的柔性模块是否满足最小按摩力20 N以及是否满足最大按摩力40 N进行仿真分析。根据柔性模块的计算与分析结论可得,弹簧刚度为0.6667 N/mm,预紧力为20 N,预紧力后弹簧长度为103.1077 mm,阻尼暂不考虑,利用Adams软件进行建模与仿真,输出最大、最小弹簧力如图11所示。
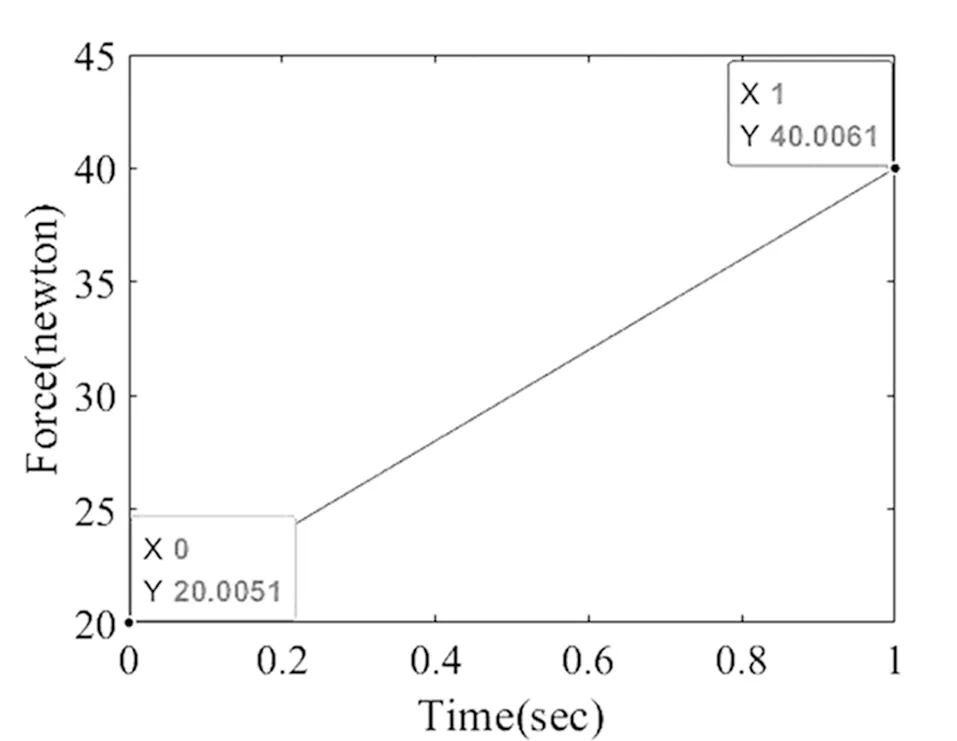
图11 弹簧力仿真输出图
根据弹簧力仿真输出图可得,最小弹簧力为20.0051 N,最大弹簧力为40.0061 N,即为最小按摩力和最大按摩力,这与设计的最小按摩力20 N和最大按摩力40 N是一致的,分析误差因素为刚度、预紧力和弹簧长度只保留了小数点后四位所致,所以柔性模块的计算与设计满足按摩的使用要求。
3.2 叩击按摩的动力学仿真
叩击按摩是叩击按摩球通过一定时间间隔反复地对按摩对象的按摩处进行一定冲击力的施加,达到按摩的目的。整个过程为三个阶段,即叩击前的运动、叩击时的运动和叩击后的运动,这三种运动下的叩击动力模块中所选的关键件(减速机、伺服电机)的性能是否满足叩击按摩的需求,需要进行分析和仿真,在整个分析过程中不考虑机器人运动对按摩执行器的影响。
叩击前后的运动是一个变加速过程,直到达到规定的速度,匀速进行叩击运动,这个规定的匀速运动的速度要结合叩击时的最大叩击力度确定。
按摩环境下,人体软组织的形变与按摩力呈现非线性关系,可以近似拟合为指数函数曲线,如下式(2-6)所示[11]:
F=0.016×e0.2364x×x
(2-6)
式中F——按摩力;x——形变;
根据上式,若形变量从0到30递增,则形变(横轴,单位mm)与按摩力(竖轴,单位N)的非线性关系如图12所示:
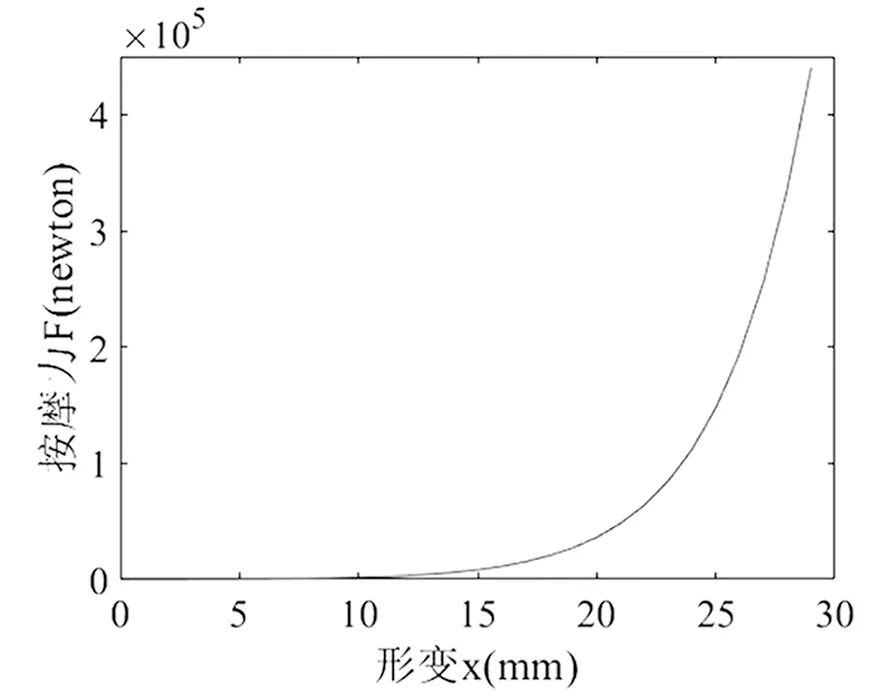
图12 形变与按摩力的非线性关系
对形变与按摩力的非线性关系进行局部优化,即加入相反方向形变和按摩力的数值,利用ADAMS的spline导入形变与按摩力的非线性关系,建立力学模型,经过数次仿真验证,在设置仿真时间0.01 s(此时间为实际匀速叩击按摩编程时间的设置提供依据)和匀速度为40°/s时,如图13所示,仿真出最大按摩力(40.44 N),非线性的形变是压缩工况下,方向为负,对应的按摩力也为负。为了达到40 N的最大力,对偏大的仿真值取整即可满足要求,即仿真出最大按摩力约为40.44 N在合理范围内。在匀速叩击按摩中产生的输出端驱动力矩如图14所示,最大输出端力矩约为8.5 N·m,最大输出端功率如图15所示,约为5.94 W。
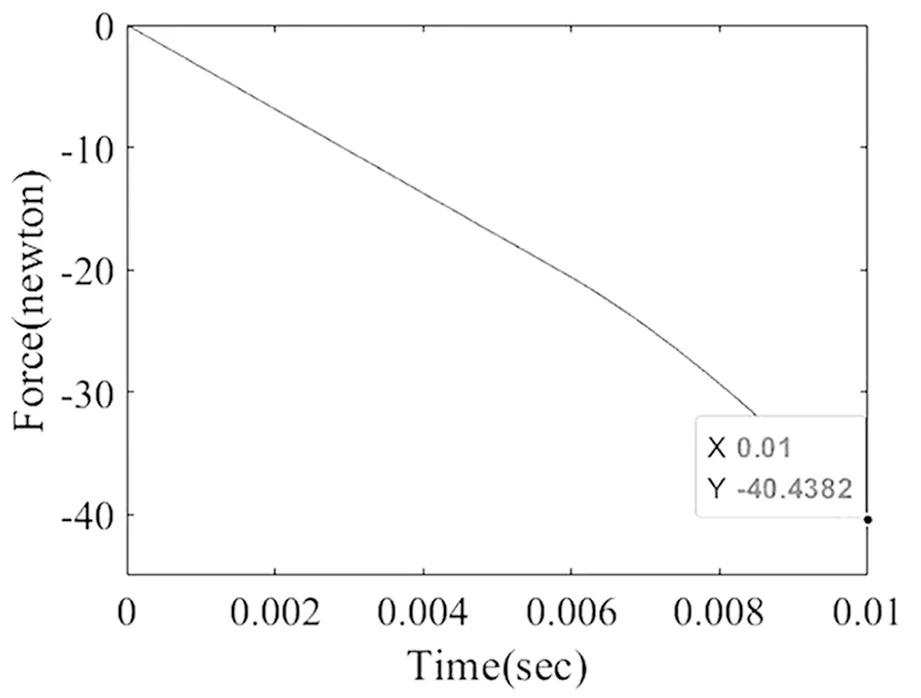
图13 最大按摩力仿真值

图14 按摩过程中输出端驱动力矩

图15 输出端功率仿真曲线
在实际的按摩过程中是通过力传感器检测到按摩力达到最大设置阈值(40N),执行器会停止施加形变到人体组织,即为按摩到位,又返回原位开始下一个周期的叩击按摩,除匀速叩击运动外,剩余反复运动为叩击前后的运动。
以叩击前的运动为例,此运动是一个变加速过程。执行器在初始位置开始加速运动,整个加速时间为200 ms(根据驱动的性能确定),在一定加加速时间(设置为50 ms)、匀加速时间(设置为100 ms)和加减速时间(设置为50 ms),运动要达到的最大速度根据匀速叩击运动可得为(40°)/s,以此速度为输入,建立加速度驱动函数,进行仿真,角速度曲线如图16所示。

图16 角速度仿真曲线
从角速度的仿真曲线可得,在时间0.2 s时即可达到最大速度(40°)/s,因为匀速角速度持续时间0.2 s,所以取在0.3 s时为匀速按摩的开始时间,此时的回转角度由仿真可得8.1°,匀速按摩时的回转角度为0.01°(忽略不计)。
叩击前的运动的输出端力矩仿真曲线如图17所示,最大输出端力矩约为1.3 N·m,最大输出端功率如图18所示,约为0.9 W。
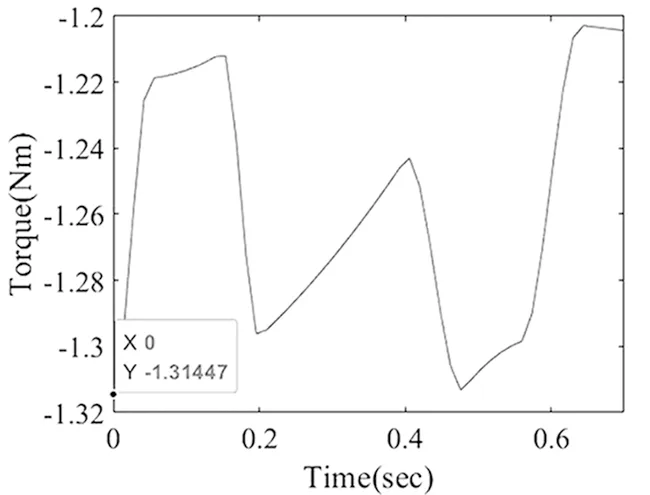
图17 输出端力矩仿真曲线
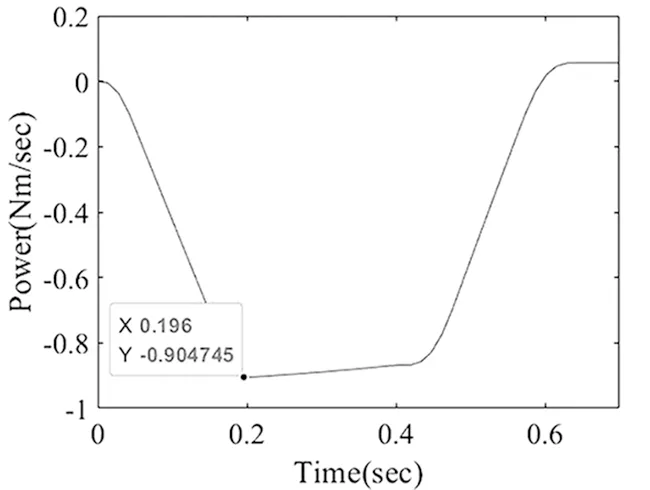
图18 输出端功率仿真曲线
由上可知,叩击前的运动从开始位置到0.3s时的回转角度(8.1°),要使返回叩击前运动的角度和叩击后运动的角度相等,即叩击前运动的开始位置和叩击运动后的结束位置在同一点。
为了达到上述要求,需重新优化叩击后运动的驱动函数,经过调整加速时间和加速度,得到运动角度为8.1°,与叩击前的角度相等,运行时间为0.3 s。得到如图19所示的叩击后运动的输出端的力矩,最大输出端力矩约为1.55 N·m。同理经仿真,得到叩击后其他参数的仿真值分别为:最大角速度约为(51.44°)/s,最大输出端功率约为1.23 W。
由仿真可得叩击前后运动的运动角度范围为8.1°,执行器的设计运动范围为±67°,所以设计的运动范围满足叩击按摩时的运动范围。又根据叩击前后运动的时间可得叩击的总运动时间为0.6 s,即叩击(拍击)频率为100次/min,叩击(拍击)按摩的频率一般在60-270次/min[11],故所设计的按摩执行器叩击频率符合要求。
叩击动力模块是通过伺服电机传动谐波减速机,通过初步设计选型可得:伺服电机选用松下低惯量电机MSME200V50W,功率为50 W,额定转速为3000 r/min,最高转速为6000 r/min,根据转速力矩曲线,选取最大转速为4000 r/min; 额定转矩0.16 N·m,最大转矩为0.48 N·m;减速机选用的是绿的谐波LCD14-50型号,减速比为50,启动停止时,最大转矩为11.4 N·m,结合减速机的性能要求,减速机的启动停止最大转矩是输出端最大力矩的主要参照依据,上述为减速机和电机相关性能参数的允许值(电机、减速机样本参数的理论值:电机最大力矩、电机额定功率、电机最大转速、减速机启动停止最大转矩)。
通过对叩击按摩的三个阶段进行仿真,最大输出端力矩(减速机端最大力矩)为8.5 N·m,最大输出端角速度为(51.44°)/s,最大输出端功率为5.94 W,结合减速比和效率等综合计算(谐波减速机效率取0.6,电机和减速机惯量不考虑),最大电机端力矩为0.28 N·m,最大电机端功率为9.88 W,最大电机端转速为428.67 r/min,以上即为减速机和电机相关性能参数的仿真值。
叩击按摩中关键件电机和减速机的参数选型是否满足设计要求,判断依据为:仿真值≤允许值(理论值),即符合使用要求。由以上关键件(电机和减速机)的允许值(理论值)和仿真结果可得表1,经比较相关参数的允许值(理论值)和仿真值均满足设计使用要求。

表1 叩击按摩动力学仿真值和理论值的比较以及结果
4 结论
(1) 设计的按叩一体的柔性按摩执行器,其结构满足滚压按摩和叩击按摩两种按摩方式的使用,能够自动实现按、叩动作的转换,提高了易用性。
(2)经过计算,此按摩执行器在滚压和叩击两种功能的使用工况下弹簧最小工作载荷为20 N和最大工作载荷为40 N,满足叩击按摩的最小按摩力为20 N和最大按摩力为40 N的要求,弹簧式柔性机构能够缓冲按摩的冲击和调整按摩行程,经过计算和选用了适合人体按摩力度的压缩弹簧,提高舒适度、安全性和可靠性。对导杆进行有限元分析,最大应力为69.8 Mpa和最大位移为0.478 mm分别满足导杆的许用应力142 Mpa和设计要求位移1 mm。叩击按摩频率为100次/min满足人体叩击按摩频率60-270次/min的要求。对关键件的设计选型进行动力学仿真校核,其中减速机端最大力矩为8.5 N·m,电机端最大力矩为0.28 N·m,电机的额定功率为9.88 W,电机最大转速为428.67 r/min,以上均小于选型的理论值,满足设计要求。
该执行器的设计和仿真为机器人按摩执行器向健康医疗领域的推广使用提供了思路和理论参照。后期会在样机测试和优化等方面做更加深入的研究,减小按摩执行器仿真值与实测值的误差,持续优化设计结构和仿真方法,在实际的使用过程中积累相关经验,提升使用的舒适性。
