永磁同步电动机网络有限时间PD同步控制
2023-10-11林致睿李建兴石宇静周从航
林致睿,李建兴,石宇静,周从航
(1.福建理工大学 电子电气与物理学院,福建 福州 350118;2.福建省工业集中自动化行业技术开发基地,福建 福州 350118)
永磁同步电动机(permanent magnet synchronous motor,PMSM)因制造成本低、功率因素高、调速范围宽、控制性能良好等优点,被广泛应用于工业生产等领域[1]。然而,永磁同步电动机作为一种多变量、强耦合的高度非线性系统,在某些参数范围下表现出混沌振荡现象,可能导致电流低频振荡,扭矩间歇性波动,转速忽高忽低等问题,对电动机的动态响应性能及其运行的稳定性造成严重危害[2]。因此,学者们提出一些控制方法消除永磁同步电动机的混沌振荡现象,保证永磁同步电动机的稳定运行[3~5]。例如,文献[3]提出了一种消除和抑制永磁同步电动机混沌振荡的自适应鲁棒控制方法。文献[5]针对外部因素导致的永磁同步电动机的参数不确定时,设计了自适应有限时间控制器消除电动机的混沌振荡现象。上述控制方法主要用于解决单台永磁同步电动机的振荡问题,但在实际中常常遇到数量众多的电动机互联的复杂电动机网络。利用复杂网络的同步控制方法研究复杂电机网络的混沌振荡问题具有重要的现实意义。现有的同步控制方法主要有自适应控制、节点反馈控制、优化控制、事件驱动控制、混合控制等[6]。近年来,因PID(Proportion integration differentiation)控制器具有简单的反馈控制结构,并且不需要精确的数学模型[7],基于PID控制的复杂网络同步研究也引起关注。Peng等[8]针对具有有向拓扑结构的时滞复杂网络,设计了PI(proportion integration)和PD(proportion differentiation)控制器,并考虑保证复杂网络全局同步的充分条件。Lin等[9]分别建立有外部干扰和无外部干扰的多输出耦合复杂网络的模型,在所设计的PD和PI控制器作用下,分别实现了两种复杂网络的H∞输出同步。而Gu等人[10]结合PI控制和自适应控制思想,提出了自适应PI控制器设计方法,利用随机分析技术和LaSalle不变原理,证明了具有随机耦合的非线性复杂网络的同步误差系统的均方稳定性。
然而,上述PID控制器仅仅是在时间趋于无穷的复杂网络才能达到同步状态。实际应用更希望可以在有限时间内实现同步,以节约时间和成本、提高效益和利润。文献[11]提出了一种保证一类具有多状态/微分耦合的复杂网络有限时间无源性和有限时间同步的PD控制器设计方案。但其所设计的PD控制器中含有符号函数,而符号函数的不连续性会导致系统产生抖振的负面影响。
综上,本课题围绕复杂网络有限时间同步控制开展研究,旨在将复杂网络有限同步控制理论应用于电动机网络研究,设计一种无抖振、高收敛性的PD控制器实现复杂网络的有限时间同步,使整个系统具有良好的稳态性能和抗干扰能力。
1 永磁同步电动机网络的数学模型
单台永磁同步电动机在d-q旋转坐标系下的数学模型如下[12~13]:
(1)
式中,id、iq和ω分别表示永磁同步电动机系统d轴定子电流、q轴定子电流和转子角速度;R1表示定子绕组;ψr是转子磁极永久磁通;Ld和Lq分别表示d轴和q轴的定子电感;J是转动惯量;β表示转子粘性阻尼系数;np是极对数;ud、ud和TL分别表示d轴、q轴的定子电压和外部扭矩;其中,R1、β、J、Ld、Lq和TL均为正数。
代入(1)式,则变换后的无量纲状态方程为:
(2)
其中:
本研究针对气隙均匀的永磁同步电动机,即Ld=Lq=L时,式(2)可变换为:
(3)

已有研究表明,当永磁同步电动机处在负载加电工作情况下,永磁同步电动机在一定的系统参数选择和外部输入下会出现混沌振荡状态[2,15]。如图1所示,当σ=5.46、γ=25时,令初始条件id(0)=5 A,iq(0)=1 A,ω(0)=-1 rad/s,永磁同步电动机系统的各状态变量处于无规则的振荡状态,其仿真的三维混沌吸引子如图2所示。混沌振荡状态可能会影响电机的工作状态,甚至引起电机传动系统的崩溃。
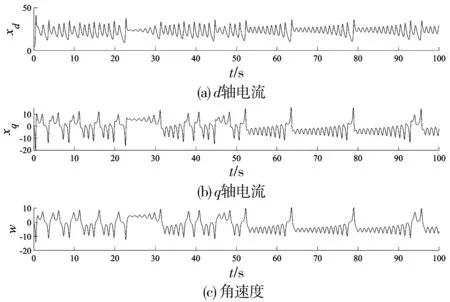
图1 永磁同步电动机状态变量混沌振荡曲线Fig.1 Chaotic oscillation curve of PMSM state variables
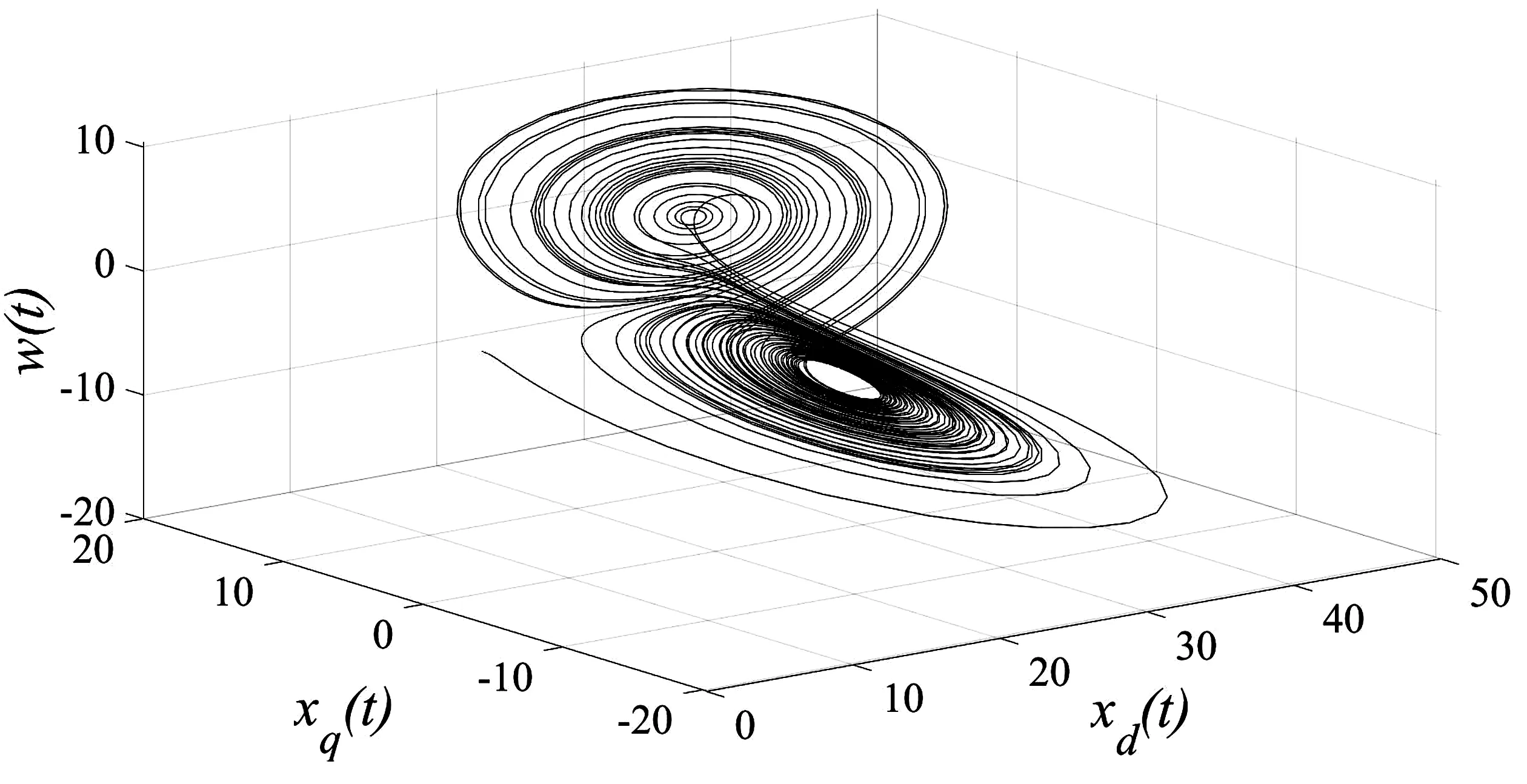
图2 单台永磁同步电动机混沌吸引子Fig.2 Chaotic attractor of a single PMSM
由N个永磁同步电动机系统构建的多电机网络在一定的系统参数下,同样呈现无周期的混沌振荡非同步状态。在多电机互联网络模式中,单机故障有可能会进一步诱发级联故障,导致整个电机网络系统的瘫痪;同时在多电机网络中需要协调多台电动机的运行,而混沌振荡现象会影响同步协调工作难以进行,进而导致电动机传动系统的崩溃。
以单台永磁同步电动机系统为节点,构造含有N个节点的电动机网络,则电动机网络的第i个节点的动力学方程如下:
(4)


(5)
则(4)可以看成如下由N个节点构成的一般化复杂网络模型的特殊形式:
(6)
其中xi(t)=[xi1,xi2,…,xin]T∈n,表示第i个节点的状态向量;f(xi(t))=[f1(xi1(t),f2(xi2(t)),…fn(xin(t))]T∈n表示连续的非线性向量值函数,用于描述每个孤立节点的动力学;ui(t)∈n表示第i个节点的控制输入;0
备注1由外部耦合矩阵A的定义可知,A=-L,其中,矩阵L为拉普拉斯矩阵。对于一个无向图,矩阵L是对称的。且0是矩阵L的一个特征值,其对应的特征向量为lN=[1,…,1]T。根据Gershgorin定理,在无向图中,L的所有非零特征值都是正的。因此,A的所有非零特征值都为负。即矩阵A是一个对称负半定矩阵。当且仅当无向图是连通时,0是L的一个特征值。因此,对于连通无向图,矩阵A的特征值为0=λ1≥λ2≥…≥λN。
2 复杂网络有限时间同步控制的预备知识
本研究的目标是通过设计合适的控制策略,在多机互联模式下控制电机网络的同步稳定性,将处在任意状态的电动机网络在有限时间内控制在稳定状态值。
令s(t)=(s1(t),s2(t),….sN(t))Τ∈N为复杂动态网络的稳定平衡点,假设它是唯一的且满足
定义同步误差为ei(t)=xi(t)-s(t),则同步误差系统可以描述为:

(7)
定义1对于复杂动态网络(1),若存在某一时刻t*>0,使得

假设1假设函数f(x)满足Lipschitz条件,即存在一个常数μ>0,对于∀x1,x2∈n有如下不等式成立:
‖f(x1)-f(x2)‖≤μ‖x1-x2‖
引理1[16]给定一个对称矩阵A∈N×N且令λmax(A)和λmin(A)分别为矩阵A的最大特征值和最小特征值,则
λmin(A)ζTζ≤ζTAζ≤λmax(A)ζTζ,∀ζ∈N
引理2[17]对于任意θi∈,i=1,2,…,n,0<τ≤1,有如下不等式成立:
引理3[18]假设一个连续且正定的函数V(t)满足以下不等式条件:
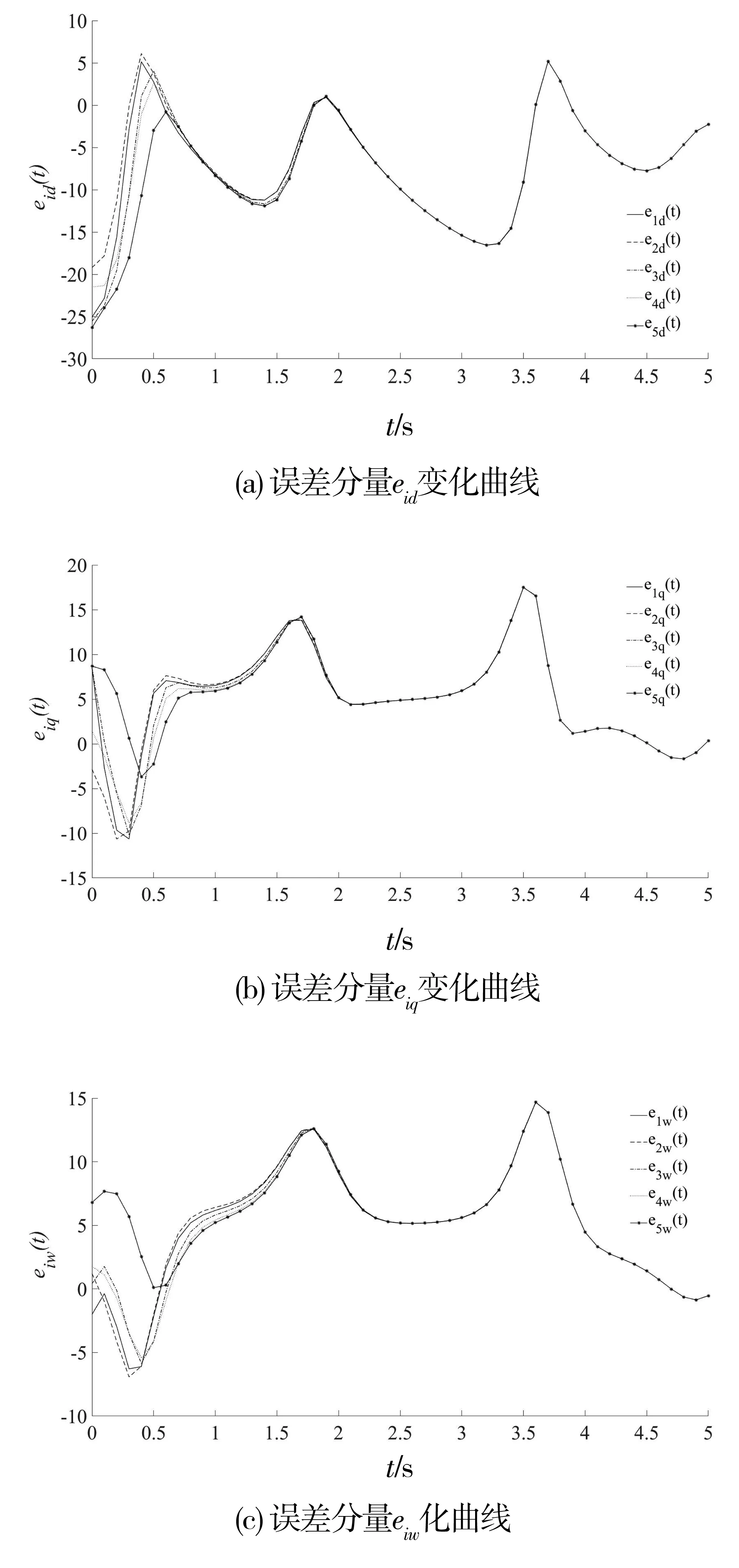
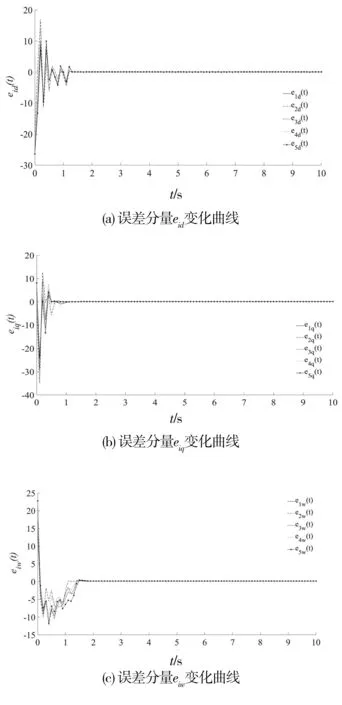
其中,l>0,0<η<1,k>0,那么对于任意初始时刻t0,当V1-η(t0) t0≤t≤t1 且 V(t)=0,t≥t1 为实现复杂动态网络(6)在有限时间内达到同步,设计PD控制器实现复杂动态网络(6)有限时间同步,并通过有限时间稳定性引理加以证明,设计PD控制器如下: (8) 由式(7)和式(8)可得同步误差系统为: (9) 定理1考虑由式(6)描述的复杂动态网络,在假设1成立的条件下,在PD控制协议(8)的作用下,当满足: 则复杂动态网络(6)可达到有限时间同步。 证明:选取如下Lyapunov函数 (10) 根据耦合矩阵A的定义,备注1可知矩阵A为对称半负定矩阵。又由KD>0,因此矩阵IN-KD(A⊗Γ)为正定矩阵且最小特征值λmin(IN-KD(A⊗Γ))=1。 计算V(t)沿系统(9)的导数并考虑假设1成立,得到: KP(β⊗IN)eε(t)] (11) 由(11)式可得: Γ)e(t)]η (12) 由假设1可得: (13) 根据引理2可得: (eT(t)e(t))η (14) 根据引理1和(13)、(14)可得: (15) 永磁同步电动机系统的参数设置为σ=5.46,γ=20。考虑含有N=5个节点的永磁同步电动机网络,耦合强度c=0.5,外部耦合矩阵如下: 电动机网络各个节点的初始状态分别为: x1(0)=[-1.062,3.665,-7]Τ, x2(0)=[4.8,-7.65,-3.8]Τ, x3(0)=[-1.55,3.714,-4.58]Τ, x4(0)=[2.5,-3.36,-3.23]Τ, x5(0)=[-2.3058,3.888,1.8]Τ. 图3 未施加控制时同步误差Fig.3 Synchronization errors without control 图4描述了在PD控制的作用下,永磁同步电动机网络各节点的状态与目标平衡点之间的同步误差变化曲线,可见永磁同步电动机网络各节点的状态与目标控制点之间的同步误差在有限时间内趋于零,即电动机网络各节点的状态在有限时间内被控制到目标平衡点,保证了永磁同步电动机网络短时间内达到电动机的稳定控制目标值,并在该目标值状态下同步正常运行。 图4 PD控制器作用下同步误差Fig.4 Synchronization errors under PD controller 为了进一步验证本研究所设计方法的优势,将PD控制器(8)与文献[15]所设计的控制器进行对比。文献[15]提出的控制器如式(16)所示: ui=cdΓ(xi-s(t)) (16) 其中,c=0.5,d=1.5,其他系统参数设置相同。则在控制器式(16)的作用下,复杂网络同步误差轨迹如图5所示。 图5 在文献[15]控制器作用下的同步误差Fig.5 Synchronization errors under controller of Reference [15] 比较本研究和文献[15]的控制器作用下的同步误差轨迹图可见,两种方法都可以使整个电动机网络在有限时间内被控制到目标平衡点。但是,在文献[15]所设计控制器的作用下,复杂电机网络的同步误差达到稳定的时间需要4 s,而本研究设计的控制器仅需要1 s,即在本研究设计的PD控制器作用下,同步速度更快,效果更佳。 本研究以单台永磁同步电动机为节点,建立永磁同步电动机的复杂网络模型,研究复杂电机网络有限时间同步问题。所设计的有限时间PD控制器不带符号函数,克服了现有的有限时间同步控制器抖振的缺陷,具有结构简单、连续、同步性能好、控制器容易实现等优点。不同于以往解决单台永磁同步电动机系统混沌振荡的问题,本研究设计PD控制器对多电机互联网络进行同步控制,将处在混沌振荡的电动机网络所有节点在有限时间内控制在稳定平衡点,并通过有限时间稳定理论分析得到抑制电动机网络混沌振荡的充分条件,数值仿真实验验证了该理论分析的正确性。
3 PD控制器设计




4 仿真


5 结语
