基于SURE小波与ITD法的电力系统模态辨识
2023-10-11邱炳林
邱炳林
(厦门大学嘉庚学院, 福建 漳州 363105)
当前,互联系统区域日趋一体化、能源供给不断协调化,不同地区的能源得以实现跨区、远距离输送,整体电力资源配置越来越优化。大量高放大倍数的快速励磁系统被用来提高系统的暂态与电压稳定,但也加深了互联系统的弱阻尼与欠阻尼状态,极易引发系统的低频振荡现象[1]。持续的振荡也将导致系统故障的进一步扩大,甚至可能影响系统的正常供电与运行[2~3]。实际电网中在存在大量噪声干扰的背景下,如何对采集到的信号进行准确的参数辨识,是该领域研究的一个亟需解决的问题,对于提高互联电力系统在弱连接下的安全稳定运行具有较大的现实意义。
为此,学者们提出了大致两类解决方案。第一类为基于模型的分析方法,如PSASP软件、Simulink模块。这类方法均是通过对模型的线性化为前提而进行的小干扰分析或系统的特征值求解。由于当下互联系统规模的持续扩大,使用这类方法对整个互联系统进行建模分析、线性化处理,显然不利于实时的在线监测分析和处理。第二类为基于信号的分析方法,常用的方法主要有傅立叶变换(FFT)[4]、滑动平均模型(ARMA)[5]、小波变换(WT)[6]、Prony[7]和希尔伯特-黄(HHT)[8]等算法。其中,FFT的主要问题在于不能很好地处理非平稳信号;ARMA的计算量较大,本身的辨识能力容易受到信号的影响,处理信号的可靠性不佳;WT、Prony以及HHT的实际应用较广,但WT的小波基函数难以确定,Prony对抗噪声干扰的能力较差,HHT存在模态混叠和端点效应的问题。
对于系统的关键振荡模态参数的辨识,需要提出在辨识能力上更为准确、计算量较小、抗干扰能力更强的参数提取算法。其中,信号的预处理极为重要。常用的信号处理办法如小波去噪,对不同信号且不同噪声背景下的信号预处理能力缺乏针对性,李志军等提出了小波阈值去噪[9],针对不同的信号采用不同的阈值处理,但仍然无法自适应地调整阈值,以根据信号特点更好地进行噪声的去除。
综上,本研究提出一种基于SURE自适应小波阈值(SURE-WT)预处理与固有时间尺度分解[10](ITD)提取关键振荡模态参数的联合辨识算法。
1 SURE自适应小波
现假设Y=[y0,y1,y2,…,yN-1]为实际信号的测量值,它由一系列t时刻测点信号yt构成,表达式为:
yt=xt+et
(1)
其中,xt、et表示对应t时刻的纯净信号测量值和高斯白噪声,N为信号长度。

(2)


综上可知,如何确定合适的阈值是解决问题的关键,因此采用如式(3)所示的阈值确定函数[11],基于SURE法自适应地估计出最合适的小波系数阈值,根据信号的特点进行变化。
(3)
其中,nj、σj、Mf分别为j尺度上小波系数的长度和噪声的标准差估计值及系数大小排序中值[12]。
最优阈值的估计是以最小均方误差为准则,即下一时刻的阈值λ(t+1)为当前阈值λ(t)与一正比于均方误差函数的梯度值Δλ(t)之和,如式(4)。
(4)
其中,μ表步长,ξ(t)表示t时刻的梯度值。
上述过程实际上是为了求出每一时刻t的阈值变化量Δλ(t),从而能够不断地根据信号的特点进行小波阈值的更新,最终重构出去噪后的信号,公式推倒和求取过程可参考文献[12]。
信号去噪效果的指标,将采用信噪比SNR和均方误差MSE进行表示,求解公式如式(5)(6)。
(5)
(6)

2 固有时间尺度法(ITD)
通过上述方法对含噪信号y进行处理,得到去除噪声后的信号x(t),并将其表示为如式(7)的形式。
(7)
其中,xi(t)表示第i个测点在t时刻时的自由响应;m为该振荡信号的模式数或阶数;λr、σr、ωr、φir分别表示第r个振荡模式对应的特征值、衰减系数、角频率以及相应的振型系数。
由于系统存在m个振荡模式,那么在第i个量测点处可将式(7)改写为式(8)形式。
xi(t)=[φi1,φi2,…,φim][eλ1ti,eλ2ti,…,eλmti]
(8)
若系统有a个观测点,在任意观测点处以相同的采样时间Δt进行采样,则由所有观测点构造出的响应矩阵Φ表示为:
(9)
将式(8)代入式(9)后,可得Φ=ψaΛa,其中,
现对某一个观测点进行等时间间隔Δt的采样,以第i个量测点为例,可得xi(t1),xi(t2),…,xi(tN),并根据上述数据构造Hankel矩阵[13],如式(10)所示。
(10)
根据文献[14],取矩阵R1=R(:,1:j-1),R2=R(:,2:j),同上操作,将式(8)代入式(10)后,分别得到R1=ψΛ与R2=ψαΛ,随后将其进行联立求解,有Aψ=ψα,α=diag[eλ1Δteλ2Δt… eλmΔt],此时问题转化为求解矩阵A的特征值,从而得到信号的振荡模态参数,计算方法由如公式(10)[14]。
(11)
其中,ωr=2πfr表示系统的振荡频率,ξi为阻尼比,σr为衰减系数,arg(sr)表示求取复数的幅角。
3 SURE-ITD方法辨识低频振荡模态
3.1 评价指标
对于衡量各方法提取关键振荡模态参数的能力,通常需要引入相关的指标进行对比分析,采用拟合系数(R-square)作为各方法提取振荡信号参数准确度的衡量标准,如下公式(12)所示。
(12)

3.2 分析步骤及流程
将SURE自适应小波阈值(SURE-WT)预处理与固有时间尺度分解(ITD)算法进行联合,用于提取系统的关键振荡模态参数,其处理步骤如下:
Step1:对采集到的含噪信号Y作小波(WT)变换,从而获取j尺度下的小波系数wj,k;

Step4:将上述得到的估计信号,即去噪后的信号,作为新的输入信号,并根据如公式(10)所示的采样过程,构造出Hankel矩阵;
Step5:根据文中的办法,选取Hankel矩阵中的元素,分别得到矩阵R1=ψΛ与R2=ψαΛ,联立求解得Aψ=ψα,α=diag[eλ1Δteλ2Δt… eλmΔt];
Step6:通过特征方程Aψ=ψα,求解矩阵A的特征值,从而得到系统的关键振荡参数。
其中,SURE-ITD的关键参数辨识,如图1所示,从中可直观地看出该算法对信号的处理过程。
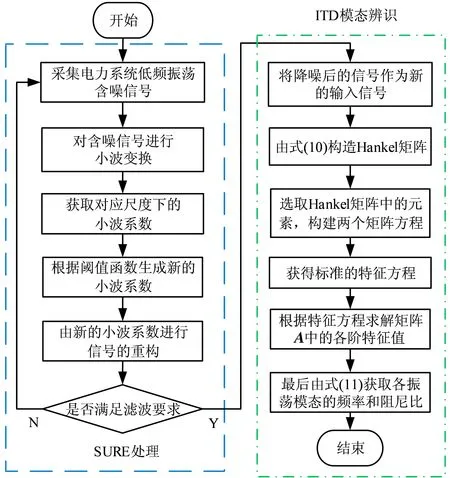
图1 SURE-ITD关键参数辨识流程图Fig.1 SURE-ITD key parameter identification flow chart
4 仿真与实验分析
4.1 测试信号
在电力系统振荡信号的测量中,为模拟实际情况下的噪声干扰,分别由3个振荡模态(其频率f分别为0.5、1.0、1.5 Hz,对应的衰减因子分别为0.1、0.3、0.5)与一个噪声分量n(t)构成一个低频振荡数学信号,如公式(13)所示,从而对所提算法的可行性进行初步的测试,并对纯净信号添加不同程度上的噪声干扰,以验证算法的抗噪性能。不同噪声背景下的信号曲线如图2所示,其中,纵轴A代表比值,pu表示无量纲。

图2 纯净信号与加噪信号曲线对比Fig.2 Comparison of curves of pure signal and signalwith noise
y(t)=5e-0.1tcos(2π×0.5t+60°)+1.5e-0.3tcos(2π×
t+30°)+e-0.5tcos(2π×1.5t+45°)+n(t)
(13)
分别采用SURE-WT去噪算法以及FIRsgolay和IIRbutter滤波器[15]进行去噪效果的对比,所得试验结果如表1所示,由表中的数据可知,所提算法能更好地提高信号的信噪比,有更好的去噪性能。
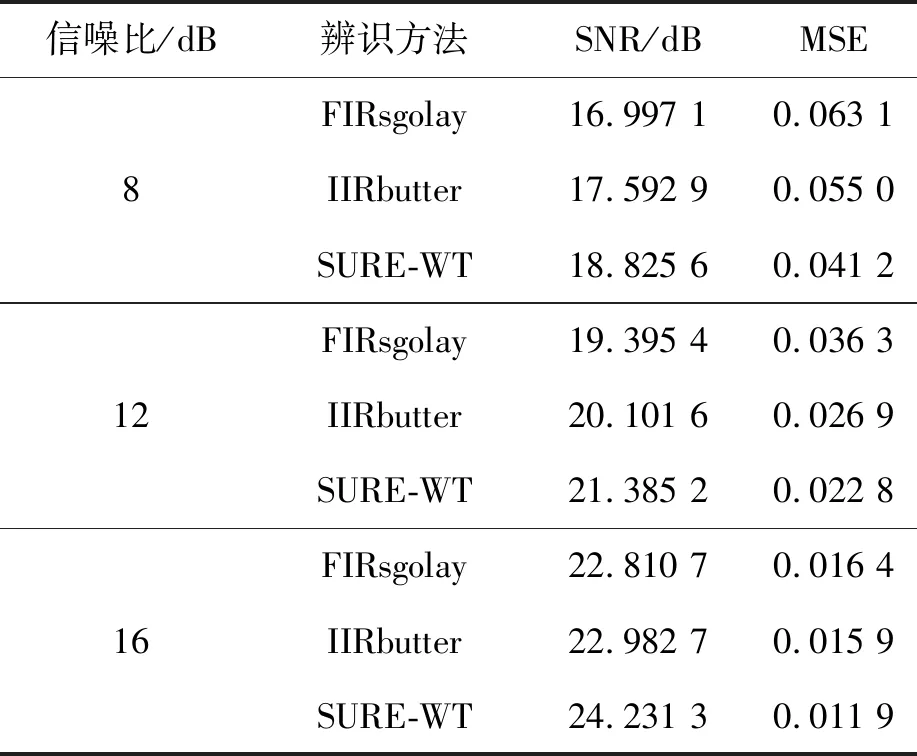
表1 各方法对不同信噪比下的噪声去除能力Tab.1 Noise removal ability of each method under different SNR
随后,对预处理后的信号进行关键振荡模态参数的获取,分别采用所提的SURE-ITD辨识法、普罗尼(Prony)以及最小二乘旋转不变技术(TLS-ESPRIT)进行关键振荡模态参数获取精度的比较,所得试验结果如表2所示,其结果均以最小的算法阶数下,进行参数的最准确辨识,SURE-ITD、Prony、TLS-ESPRIT法各阶数分别取20、30、10阶。由表2中的实验数据可知,3种辨识法对频率的辨识误差均在可接受的范围内,但相对来说,Prony在对第3个振荡模态进行辨识时,其频率误差分别达到0.081 4、0.043 7以及0.043 3 Hz,相对误差较大,另一方面,Prony和TLS-ESPRIT对衰减因子的辨识能力较差,其Prony的误差分别达到0.334 9、0.236 5、0.174 0,TLS-ESPRIT的误差值分别达到0.164 8、0.125 1、0.039 8,远不如SURE-ITD的辨识准确度,可见SURE-ITD具有更好的辨识能力。
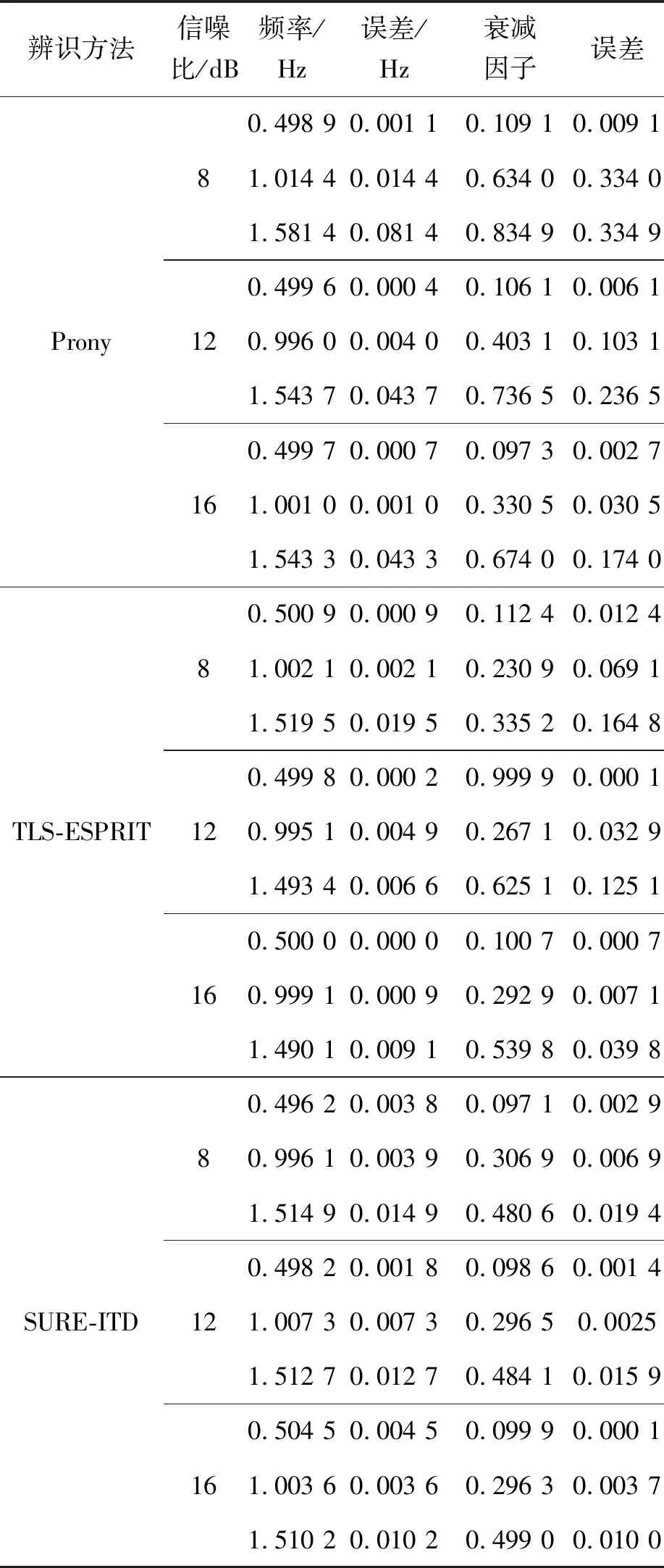
表2 3种算法的辨识结果Tab.2 Identification results of three algorithms
各方法实验结果的拟合曲线如图3所示。通过各拟合曲线对原始信号的还原度,即曲线之间距离的远近关系,可初步判断SURE-ITD法能够更好地还原出原始信号,并结合表3所示的在不同信噪比下,由各方法辨识拟合精度中的拟合系数(R-square)和均方误差(MSE)可知,SURE-ITD法相对于Prony、TLS-ESPRIT算法而言,其拟合效果更好,辨识精度更高。

表3 不同信噪比下各种方法辨识的拟合精度Tab.3 Fitting accuracy of each method identification under different SNR
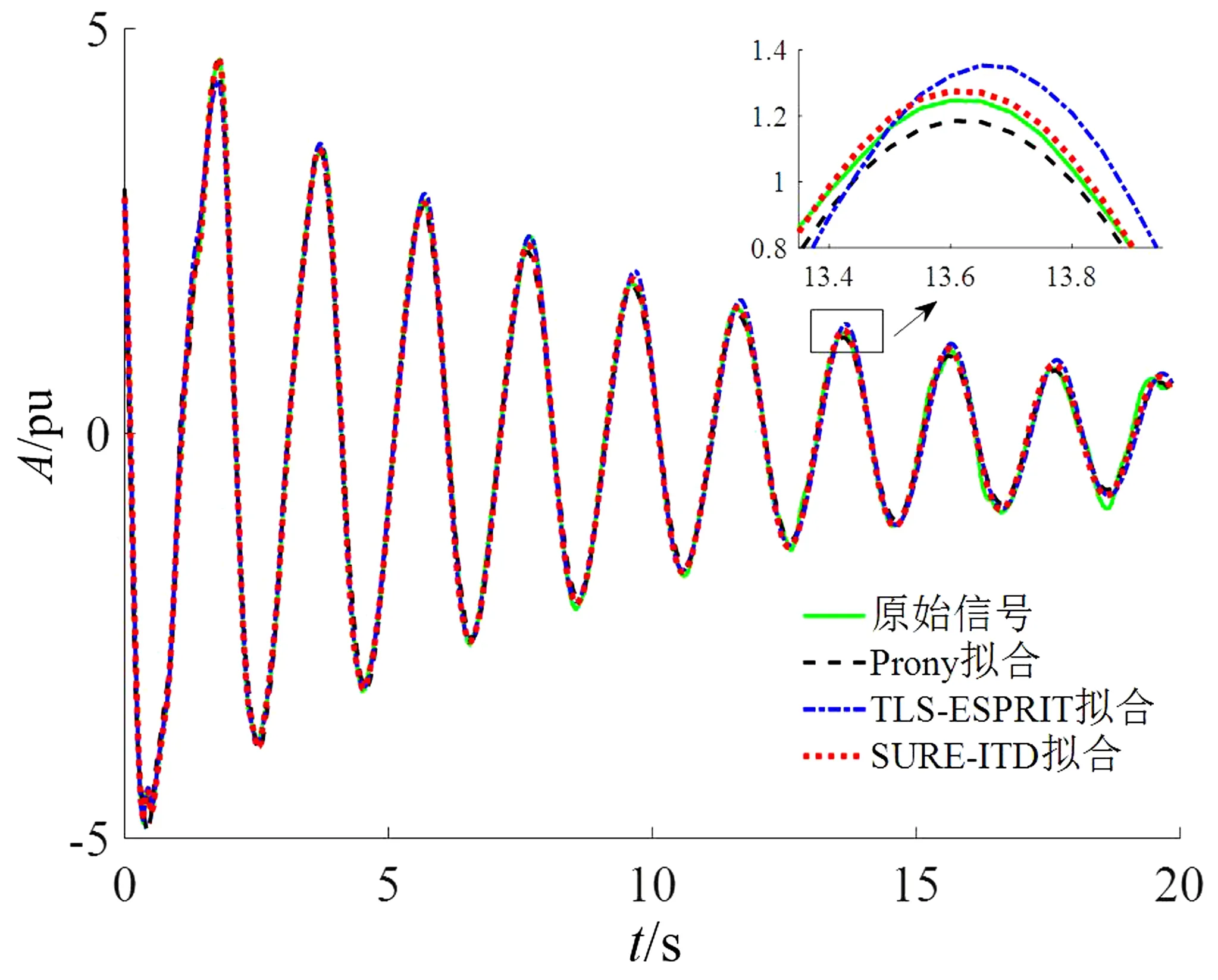
图3 信噪比12 dB下各方法的拟合曲线Fig.3 Fitting curve of each method under SNR of 12 dB
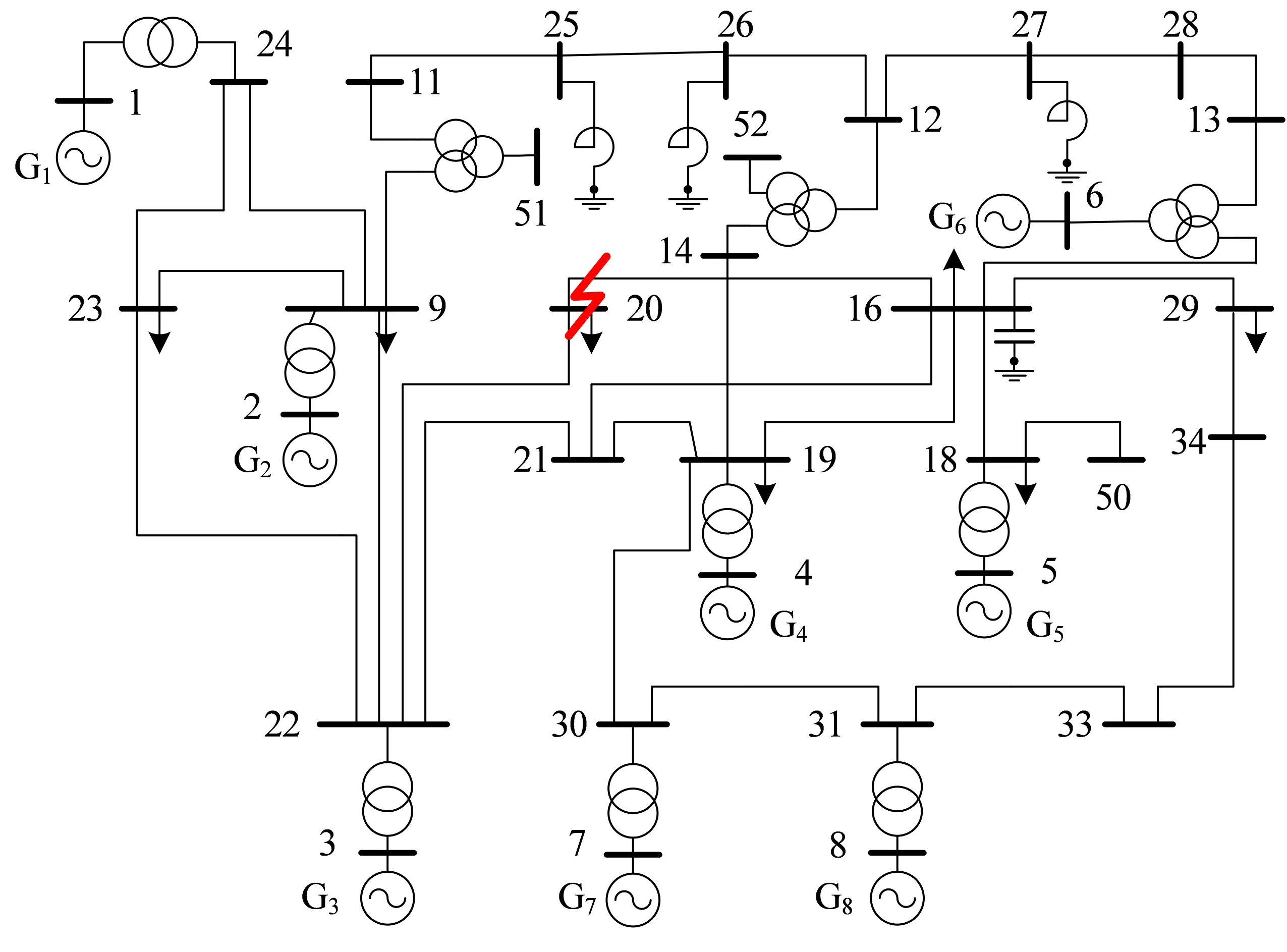
图4 EPRI-36节点仿真系统Fig.4 EPRI-36 node simulation system
4.2 EPRI-36系统算例分析
为进一步验证SURE-ITD法的可行性,采用PSASP软件中的8机36节点仿真系统,在母线20处设置一0.2~0.6 s且大小为0.5 p.u.的有功冲击负荷,并以G1为参考机,取G1~G7的相对功角振荡作为输入信号。为模拟实际信号中的噪声干扰,将分别对信号添加14、18、22 dB的高斯白噪声,如图5所示,特征值结果如表4所示。

表4 特征值计算结果Tab.4 Results of eigenvalue calculation
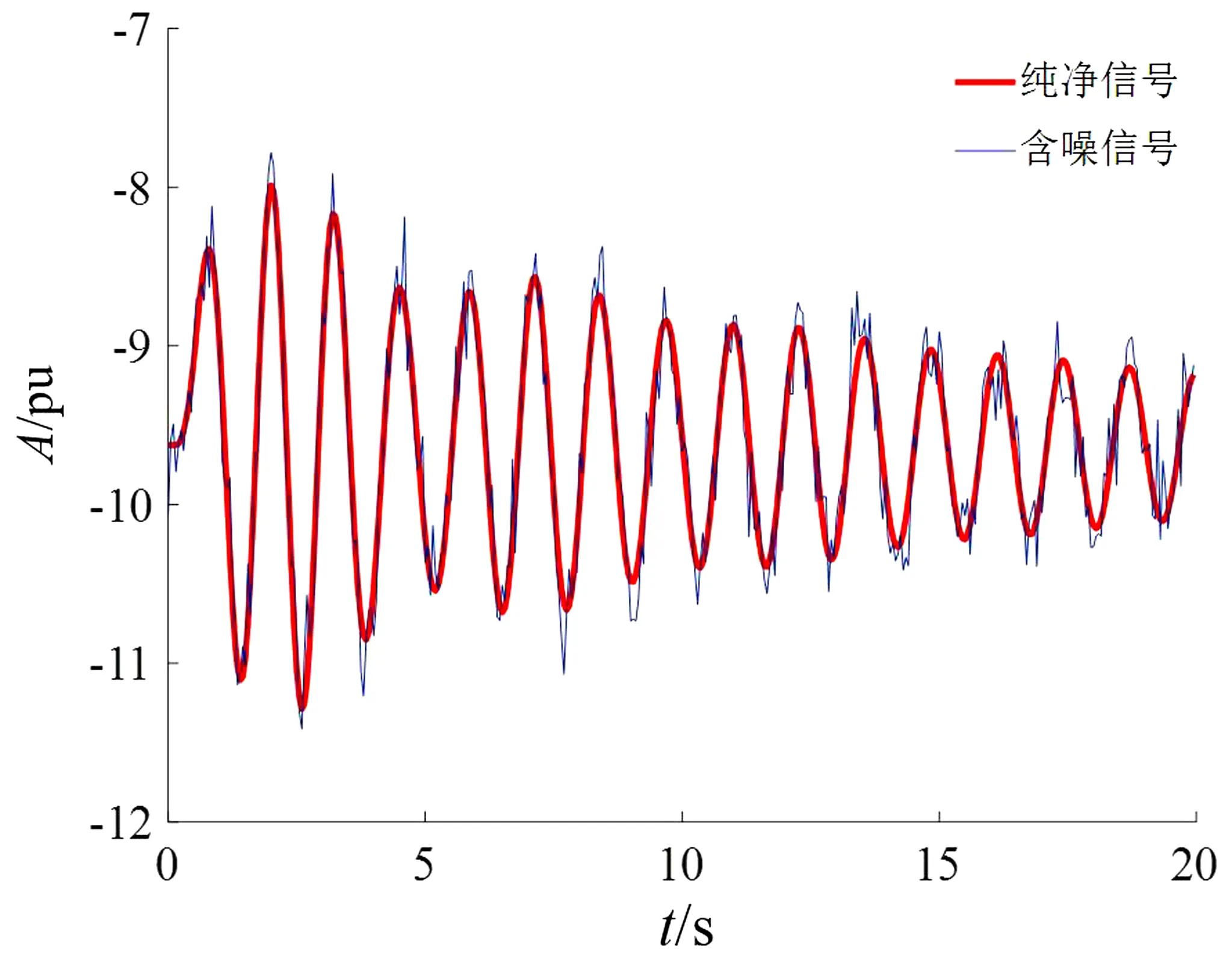
图5 原始信号与含噪信号曲线对比图Fig.5 Comparison diagram of original signal curve and that with noise
根据系统的特征值分析结果,采用所提的SURE-ITD、Prony以及TLS-ESPRIT分别对系统G1~G7的相对功角振荡加噪信号进行关键振荡模态参数的提取,发现各算法所辨识出的两个振荡模式,分别对应着表4中的第5行和第6行,其频率分别为0.980 2、0.777 5 Hz, 衰减因子分别为0.267 5、0.054 7。为对比各方法在辨识能力上的优劣,将上述PSASP软件由小干扰分析模块得到的特征值分析结果,作为标准参考值;将SURE-ITD、Prony以及TLS-ESPRIT各方法所辨识出的关键振荡模态参数,做误差分析,结果如表5所示。
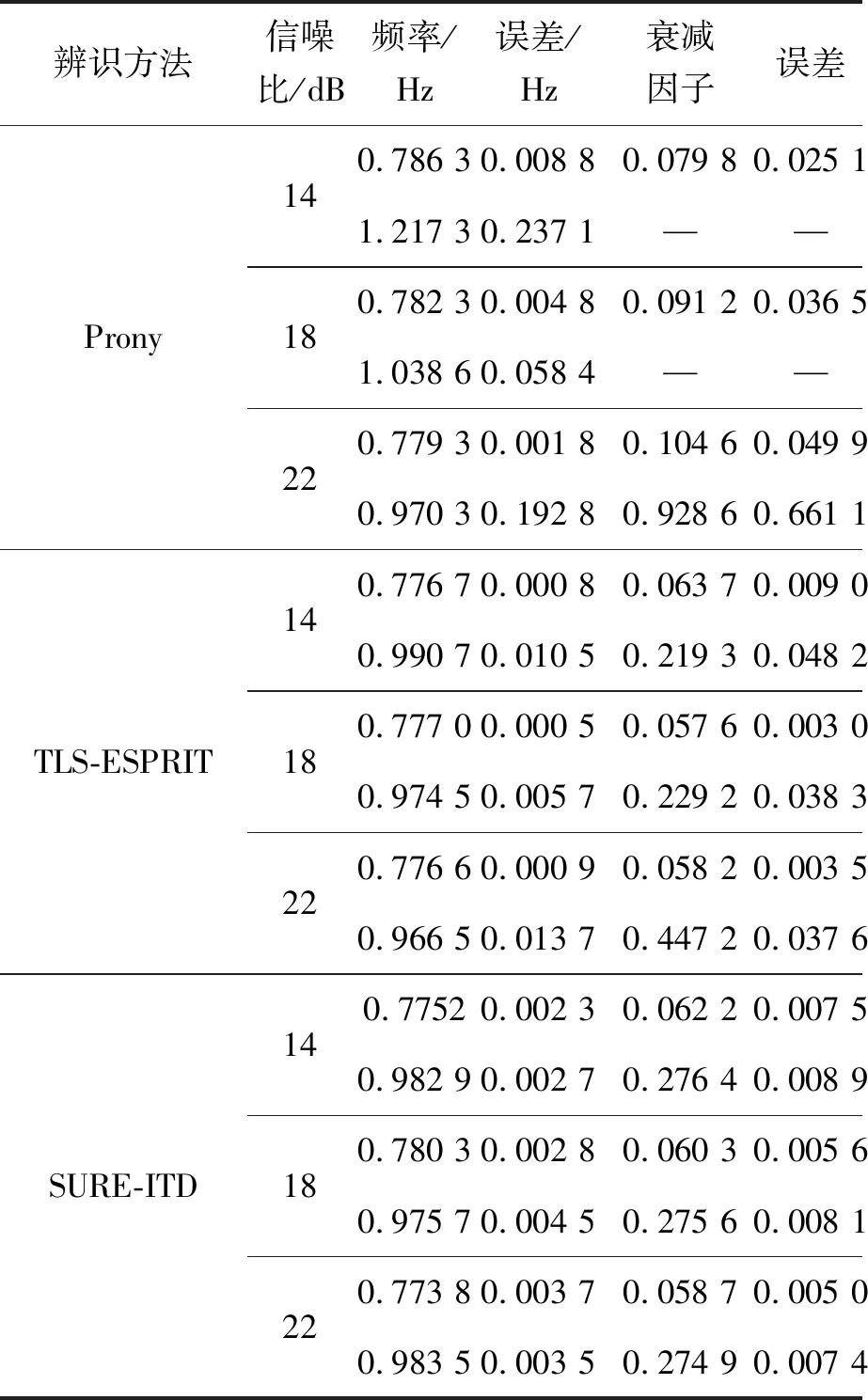
表5 3种算法的辨识结果Tab.5 Identification results of three algorithms
由表5可知,当信噪比为14、18 dB时,Prony法无法识别出第2个振荡模态下的衰减因子,对频率的辨识误差较大,最大时达到0.237 1、0.192 8 Hz;而对于TLS-ESPRIT法的主要问题在于其辨识出的衰减因子误差过大,最大时达到0.048 2、0.038 3和0.037 6。衰减因子对应着系统的阻尼系数,过大的误差则意味着无法准确地辨识出系统的阻尼系数,这对于后续抑制低频振荡、构建优化目标函数十分不利。综上所述,在相同的实验条件下,所提SURE-ITD法的辨识性能更佳。
为了更直观地展示各方法的辨识能力,绘制出SURE-ITD、Prony以及TLS-ESPRIT各拟合曲线与原始信号曲线的对比如图6所示。由图6的拟合曲线可初步判断,SURE-ITD法能更好地还原出原始信号曲线。结合表6的拟合误差分析可知,SURE-ITD法具有更高的拟合系数和更小的均方误差,且Prony和TLS-ESPRIT法的拟合误差较大,表明了在该仿真算例下,两种算法的辨识能力完全失去了优势。综上,所提方法性能更好。

表6 不同信噪比下各方法辨识的拟合精度Tab.6 Fitting accuracy of each method’s identification under different SNR
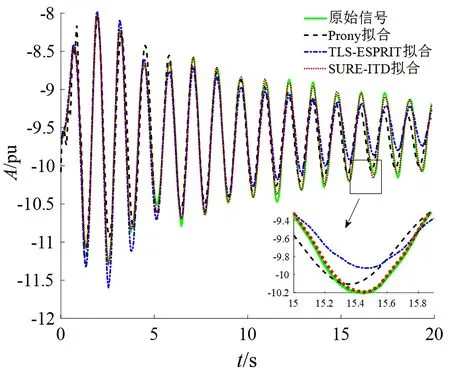
图6 信噪比14 dB下各方法的拟合曲线Fig.6 Fitting curve of each method based on SNR of 14 dB
4.3 实测信号分析
为验证所提联合辨识算法在实际电网中对低频振荡信号的适用性,取国外某地电网发生过的一起低频振荡事故所测取的信号曲线(如图7)进行分析。图7中,横轴表示测取信号时对应的测取时间,纵轴表示电网系统频率下降时的振荡频率。应用matlab软件中的小波分析工具箱对该数据曲线进行时频能量分析,所得结果如图8所示,根据图8中区域的颜色分布,可初步判断系统的振荡频率位于1.5~2.0 Hz的范围,并且,对应的有效信号的测取时间为15~20 s。
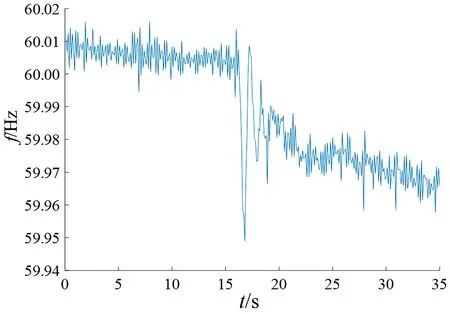
图7 电网中的实测频率曲线Fig.7 Measured frequency curve in power grid
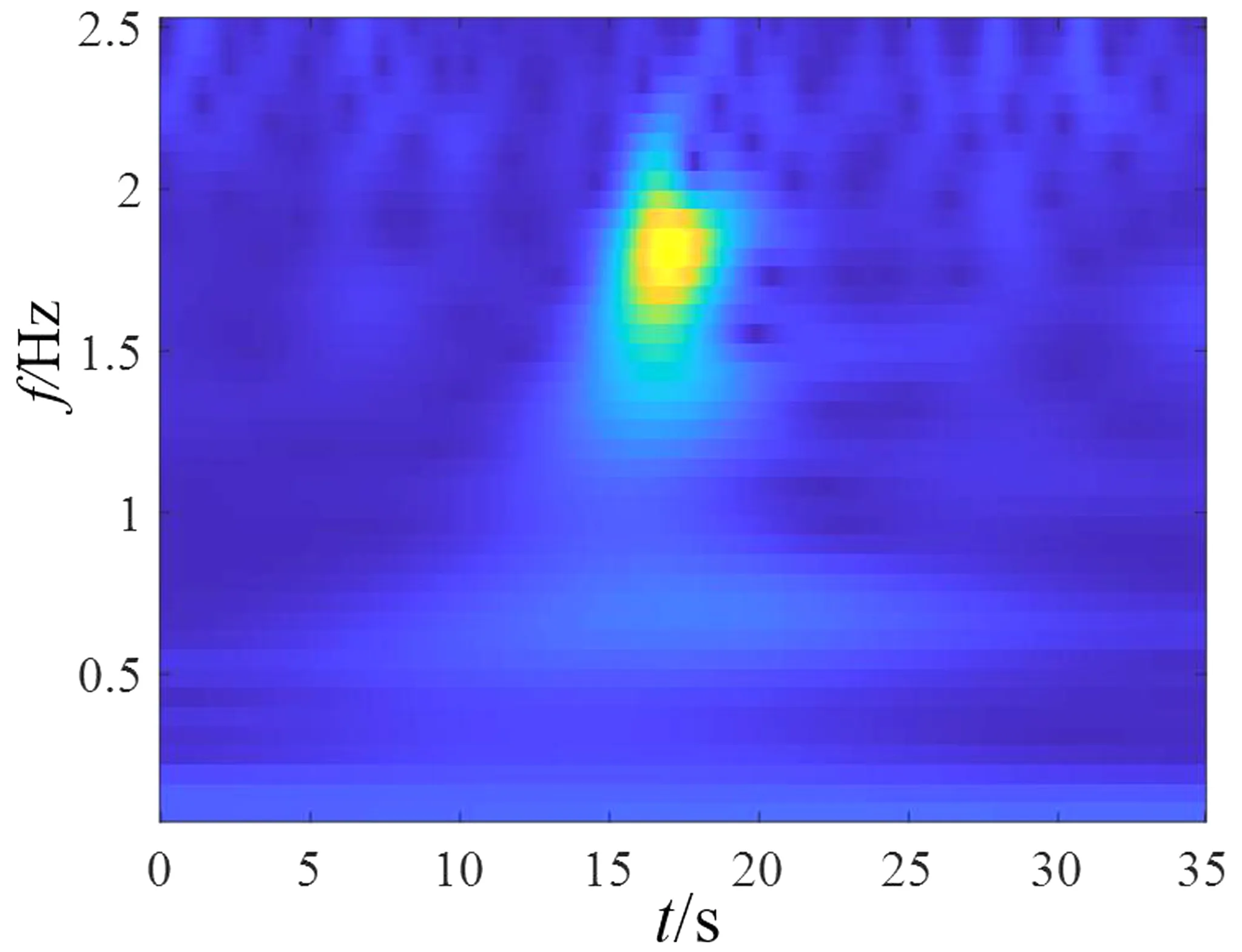
图8 小波能量分析图Fig.8 Wavelet energy analysis diagram
综上分析,可知系统振荡信号的有效测取时间段和大致的振荡频率区间。为了更准确地进行参数的辨识,将图7中的有效数据段进行信号数据区间的截取,以验证所提出的SURE-ITD法的参数辨识能力,并对辨识结果进行参数的拟合,以验证算法辨识结果的准确性,所得结果如图9所示。从图9可知,此次系统的低频振荡事故中,存在两个起关键作用的振荡模式,其频率分别为1.588 3、1.900 7 Hz,阻尼比分别为2.83%、0.47%。通过数据曲线的拟合以及小波能量的时频分析,确定了该结果的正确性,也验证了所提SURE-ITD联合辨识算法在实际电网中的可行性。
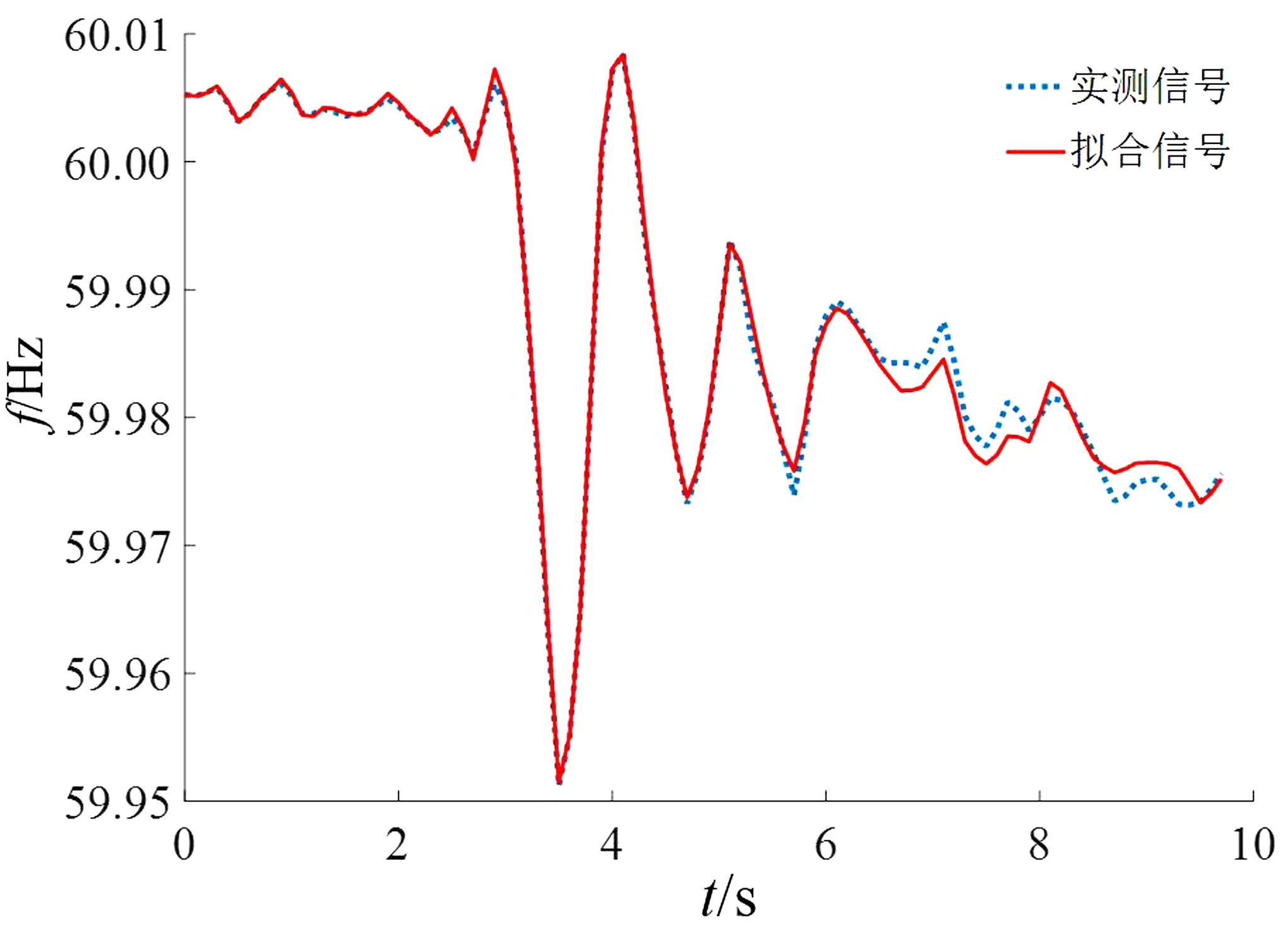
图9 电网中的实测频率曲线Fig.9 Measured frequency curve in power grid
5 结论
本研究联合了基于无偏似然估计的自适应小波阈值(SURE-WT)与固有时间尺度分解法(ITD),提出了一种新的低频振荡关键参数的联合辨识算法,解决了传统辨识算法抗噪能力不足等问题,并进行了相关的实验分析,所得实验结果及结论如下:
1)在进行低频振荡信号的预处理上,采用了基于SURE的自适应小波阈值处理,经实验结果表明,引入了动态的自适应阈值调整公式,能够更好地实现对含噪信号噪声的去除,实现完美的信噪分离。
2)通过最优阈值的估计,将处理后的信号作为固有时间尺度法新的输入信号,并以此信号来构建相应的信号测点矩阵及求解其矩阵的特征值,从而获取对系统起关键作用的振荡模态参数,实验结果符合预期。
3)实验分别采用数学信号、PSASP软件中的8机36节点仿真系统信号以及实测信号,并添加不同强度下的干扰噪声,以模拟实际情况,经对比多种方法的辨识精度,验证了所提方法的有效可行性。
