基于多维特征神经网络集成的有源干扰识别算法
2023-10-11赵忠臣刘利民韩壮志
赵忠臣,刘利民,解 辉,韩壮志,荆 贺
(陆军工程大学石家庄校区 电子与光学工程系,河北 石家庄 050003)
0 引言
现代战争中,雷达成为夺取制电磁权的重要手段,要完成诸多作战任务。随着数字射频存储[1(]Digital Radio Frequency Memory,DRFM)技术不断发展成熟,使得雷达有源干扰具有很强的目的性、灵活性和针对性[2],严重威胁着雷达的生存及其效能的正常发挥。因此,迫切需要研究高效、稳定的干扰识别算法,为雷达选择最优抗干扰策略奠定基础[3]。
近年来,科研人员在雷达干扰信号识别方面取得了一定进展。文献[4-5]通过小波分解将干扰划分为不同频段,提取频域特征参数完成分类识别。文献[6-8]经过分数阶傅里叶变换(Fractional Fourier Transform,FRFT)和Choi-Williams 分布(Choi-Williams Distribution,CWD)得到干扰时频信息,实现对干扰信号的分类识别。文献[9-10]通过分析干扰信号特征之间的差异,利用决策树(Decision Tree,DT)分类器进行识别。文献[11]使用长短时记忆网络(Long Short-term Memory Network,LSTM)进行序列预测,再将预测结果与实测信号作比较,通过误差比较实现检测。文献[12-14]通过卷积神经网络(Convolutional Neural Network,CNN)及其优化算法对各类干扰的识别准确率较高,具有很好的鲁棒性。但在强噪声环境下,干扰信号会被噪声淹没。以上方法由于运用特征与分类器单一,存在干扰识别率不高的问题。
针对上述情况,本文通过构建神经网络集成模型,利用多维特征实现了对干扰信号的分类识别。该模型以间歇采样转发(Interrupted Sampling and Repeater,ISR)干扰、频谱弥散(Smeared Spectrum,SMSP)干扰、切片重构(Chopping and Interleaving,C&I)干扰、梳状谱(Comb Spectrum,COMB)干扰[15]、噪声乘积(Noise Product,NP)干扰和噪声卷积(Noise Convolution,NC)干扰等6 种新型有源干扰为研究对象,通过短时傅里叶变换(Short-time Fourier Transform,STFT)和等间隔采样获得干扰信号的时频分布与幅度、功率谱密度、频谱瞬时包络等一维特征,运用Stacking 策略进行网络构建与集成,有效提高网络系统的泛化能力,经过仿真对比,功率谱密度、频谱瞬时包络与时频图特征组成的集成神经网络在强噪声环境下取得了良好的分类识别效果。
1 网络模型
1.1 深度自编码器
深度自编码器(Deep Auto Encoder,DAE)使用逐层编码,在有监督微调的训练过程能有效解决误差弥散问题,成功应用于语音信号处理中,适合于一维数据分类问题[16]。
DAE 结构如图1 所示,其组成元件包括:编码器与解码器。编码器通过逐层特征提取,实现对输入信息的分级表达,如公式(1)所示,最终得到输入数据的抽象编码特征。解码器将编码特征逐级还原到初始维度,对输入进行重构,如公式(2)所示,最好的状态是解码器的输出能够完美地或者近似恢复出原来的输入。
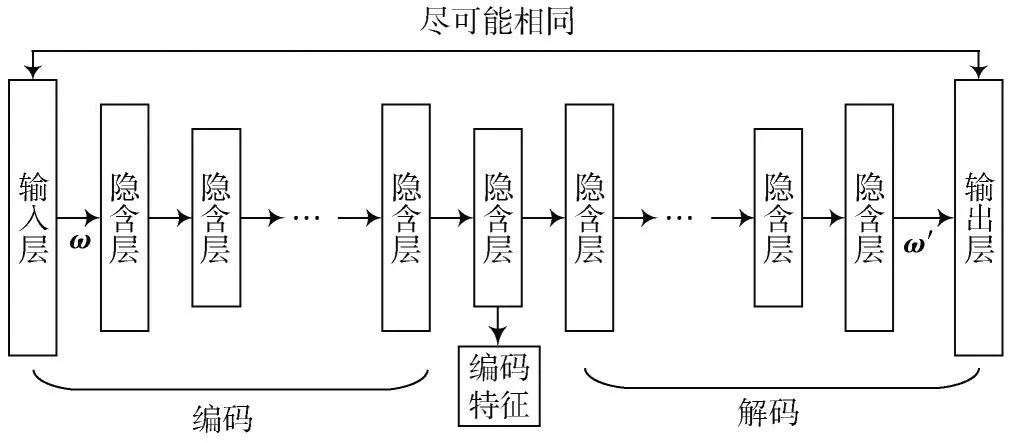
图1 DAE 典型结构
式中:x表示输入向量;s表示非线性激活函数;ω是权值列向量;b是偏置量;h是编码向量。
1.2 卷积神经网络
CNN 具有局部区域连接、权值共享及池化降采样的结构特征,能够自动提取图像特征,适合二维图像分类问题[17-19],其结构如图2 所示,由卷积、池化、全连接堆叠而成。
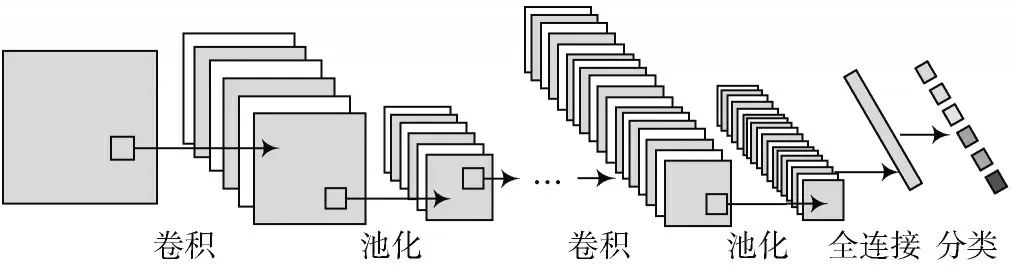
图2 CNN 典型结构
卷积层是网络的核心,用于输入特征提取,如公式(3)所示,其计算过程是先对上一层输入进行卷积运算,再加入一个偏置b,最后通过激活函数f(·)输出。
池化层的作用是对卷积层的输出进行降维,如公式(4)所示,它将图像某一特定区域内的相邻像素合并成单个代表值。
式中fdown是下采样函数,通常选取最大池化、均匀池化。
全连接层将提取的特征进行压平,降低其维度,再接softmax 分类层实现分类,如公式(5)所示,全连接层的输出可以看成前一层的节点乘权重系数,最后加上偏置b。
2 算法原理
2.1 理论推导
神经网络集成是用有限个神经网络对同一个问题进行学习,集成在某输入示例下的输出由构成集成的各神经网络在该示例下的输出共同决定[20]。
集成神经网络的泛化误差和第i个子网络fi的泛化误差分别为:
泛化误差能够反映模型的泛化能力,本质是所学习到的模型的期望风险,泛化误差值越小,表明方法越有效。
2.2 方法实现
在神经网络集成的实现上一般分为两个环节:一是生成集成中的子网络;二是组合多个子网络的输出结果。
针对生成集成的子网络,最经典的技术手段是Boosting、Bagging 和Stacking,其基本思路是改变各子网络训练集的样本组成。如Boosting 根据子网络上训练数据的情况,将已有网络错判的样本按概率参与新网络的训练;Bagging 方法是一种从给定训练集中有放回的均匀抽样,可以增加集成中子网络的差异度;Stacking通过构建多级学习器进行预测,通常为两级,其中一级学习器的预测结果作为二级学习器的输入,来得到最终的结果。Boosting 和Bagging 都是使用同一种基学习器,Stacking 可以基于多种不同的基学习器进行集成。本文一维特征选择DAE、二维特征选用CNN 作为两种不同的一级学习器,因而使用Stacking 方法进行集成。
针对组合多个神经网络的输出结果,主要方法是按比例结合各子网络输出。Bagging在融合各个基础分类器时权重相同,而Stacking则不同,Stacking的二级学习器是根据一级分类器输出的确定性强弱进行动态权值组合。
经典的Stacking 学习框架如图3 所示,它由两级分类器构成,一级分类器是本文所提的子网络,二级分类器是集成网络,用于对子网络的输出进行集成。Stacking 模型集成的实现分为两个阶段,一是训练过程,二是测试过程。
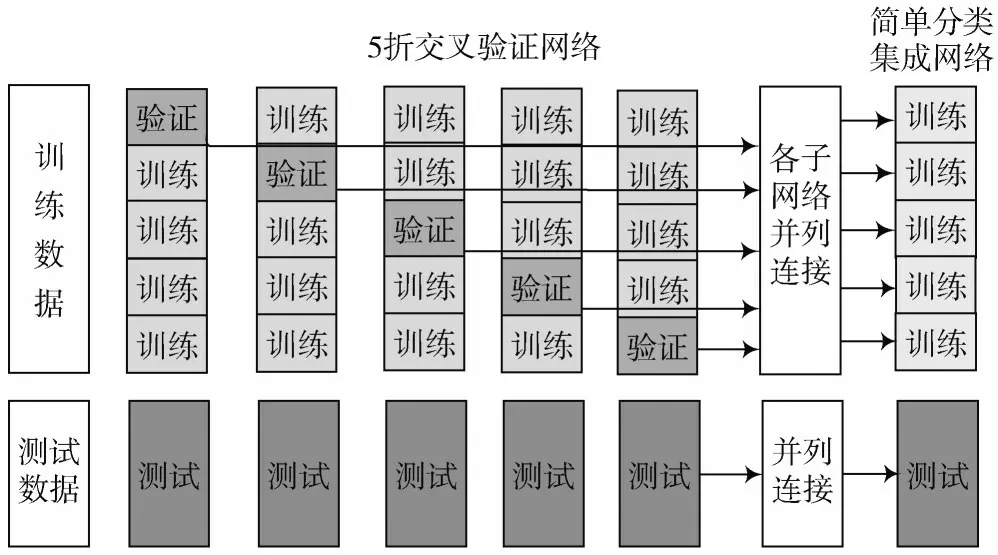
图3 经典Stacking 学习框架
2.3 特征获取
2.3.1 一维特征获取
幅度作为经典的时域参数,可以清晰表示出信号在不同时刻的取值。本文对每个干扰信号样本在时域等间隔选取N点对应的幅度进行归一化处理,构建1 ×N的幅度特征矩阵。
频域特征描述了信号的频率结构及频率与该频率信号幅度的关系。本文选取功率谱密度和频谱瞬时包络为频域特征。利用基于Hanning 窗的Welch 平均功率图法得到干扰信号的功率谱密度,每段长度为N,相邻窗重叠50%以便进一步平滑噪声。对每个样本x(n)进行FFT 得到其频谱,再对频谱进行希尔伯特变换,得到频谱瞬时包络,等间隔选取N点对应的值进行归一化处理,即构成1×N的频谱瞬时包络特征矩阵。
2.3.2 二维特征获取
时频图作为二维特征,能够更加直观、精确地反映信号的综合特征。时频分析方法可以分为两类:一类是核函数分解,也称为线性时频描述,如短时傅里叶变换、小波变换(Wavelet Transform,WT)等;另一类是时频能量密度型,如维格纳-威尔分布(Wigner-Ville Distribution,WVD)等。
本文对比了STFT、WVD、PWVD、SPWVD 和CWD等5 种时频分析方法在相同参数和网络结构下的检测结果,如图4所示。为达到更好的识别效果,选择了识别准确率最高的STFT来提取干扰信号的时频分布谱图。
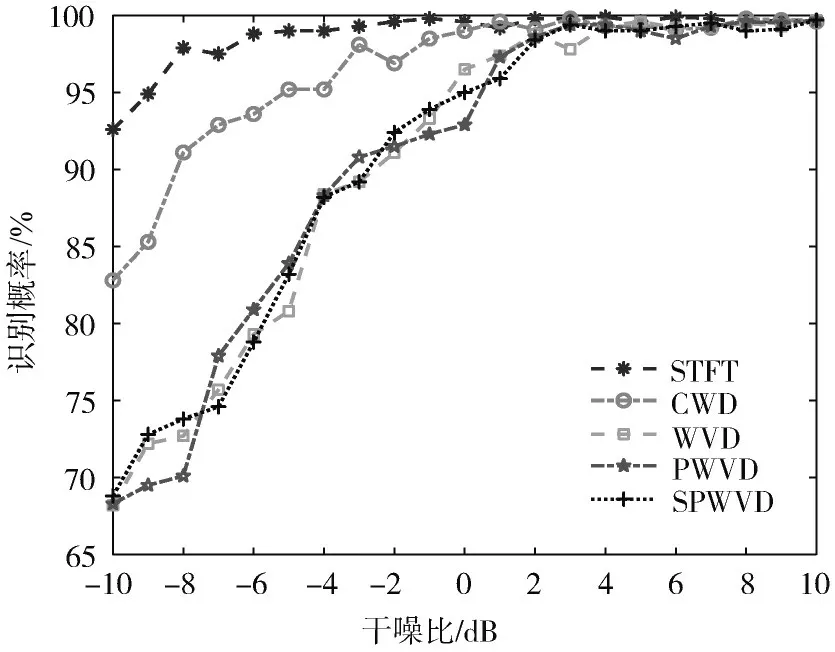
图4 五种时频分析方法检测结果
2.4 网络结构
神经网络集成的结构流程如图5 所示。
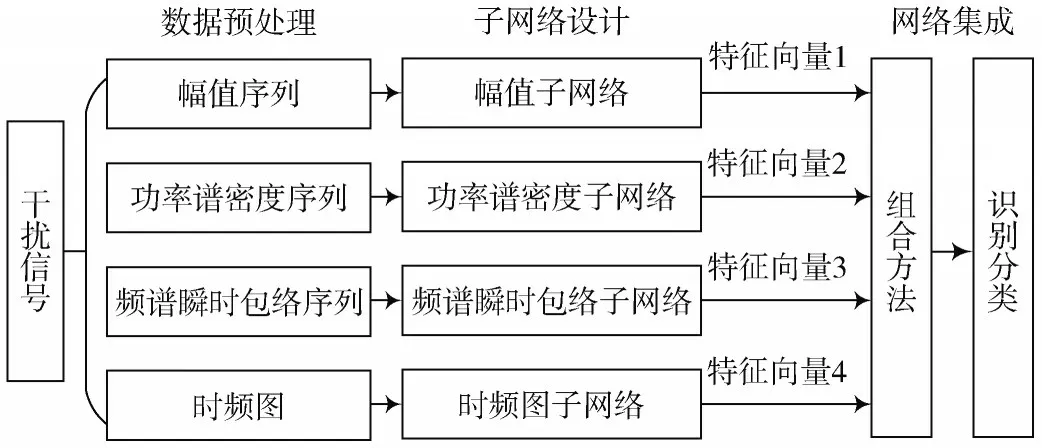
图5 集成网络流程图
实现步骤为:首先对干扰信号进行预处理,使用5 折交叉验证(Cross-Validation,CV)得到幅度、功率谱密度、频谱瞬时包络、时频图4 个子网络模型;然后利用简单的softmax 分类器将时频图子网络分别与幅度子网络、功率谱密度子网络、频谱瞬时包络子网络及其组合进行集成;最后通过机器学习得到检测结果,比较7 种集成方式的分类识别效果,确定最优集成模式。
3 仿真分析
3.1 干扰数据集构建
干扰信号以雷达信号为基础,通过对雷达信号的整个脉宽进行调制得到6 种干扰信号。雷达基本参数和干扰变化参数分别如表1 和表2 所示。
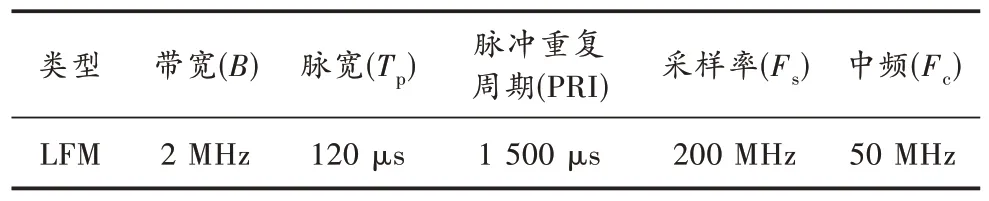
表1 雷达信号基本参数
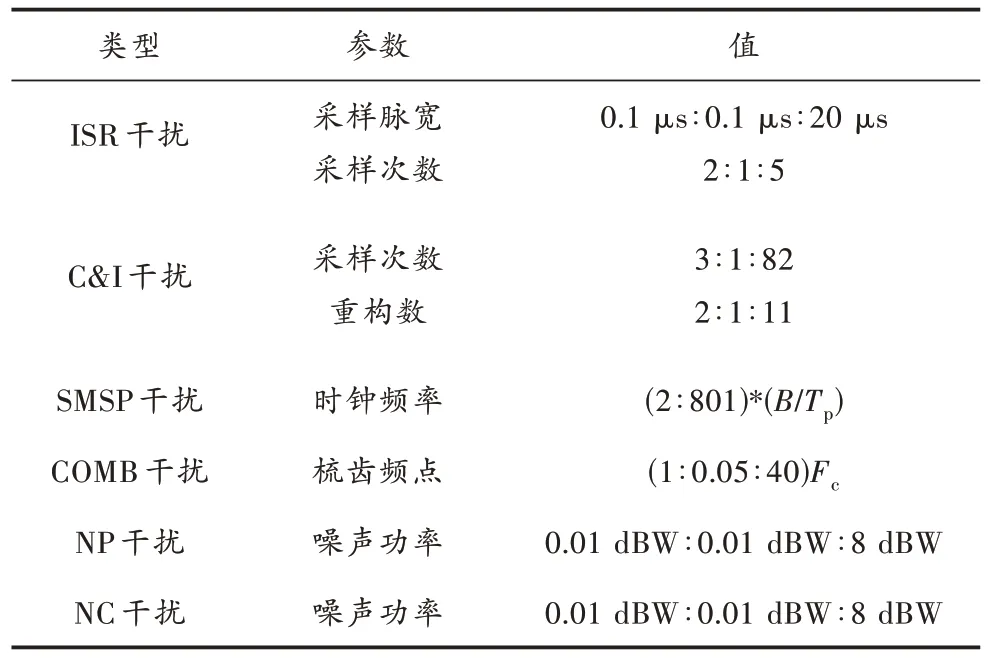
表2 干扰信号参数
为了验证识别算法在强噪声环境下的稳健性,本文设定干噪比(Jamming Noise Ratio,JNR)变化范围为-10~10 dB。数据集规模为每种干扰共产生800 个样本,选取80%(640 个)作为训练样本,剩余20%(160 个)为测试样本,且确保同一样本的幅度、功率谱密度、频谱瞬时包络、时频图和标签一一对应,构建了6×640 的训练样本集和6×160 的测试样本集。
为了确定最优特征维度,仿真对比了在相同噪声环境下时频图大小为64×64、128×128、256×256 时单次训练所用时间和检测结果,如表3 和图6 所示。

表3 不同维度时频图单次训练时间
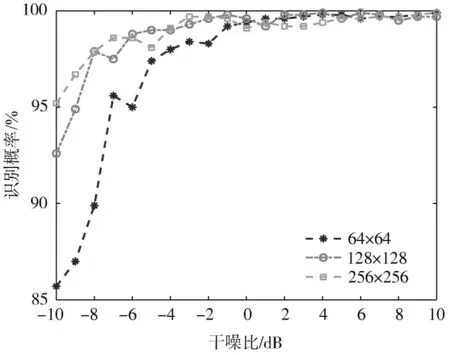
图6 不同维度时频图单次检测结果
综合分析检测概率与训练时间,时频图大小为128×128 时,能够兼具较高检测概率和实时性,为了保证数据维度的一致性,一维特征序列长度N也选择128。
3.2 训练过程
幅度、功率谱密度、频谱瞬时包络等特征为一维序列,本文使用含50 个隐含层且完全连接的DAE 网络结构进行训练;针对时频图二维图像,考虑数据集质量和规模,选用经典的7 层LeNet 网络,学习率为0.01,训练准则是最小化交叉熵损失,训练算法是带动量的随机梯度下降法。
通过训练样本集,采用5 折交叉验证的方法得到各子网络模型,训练结果如图7 所示。
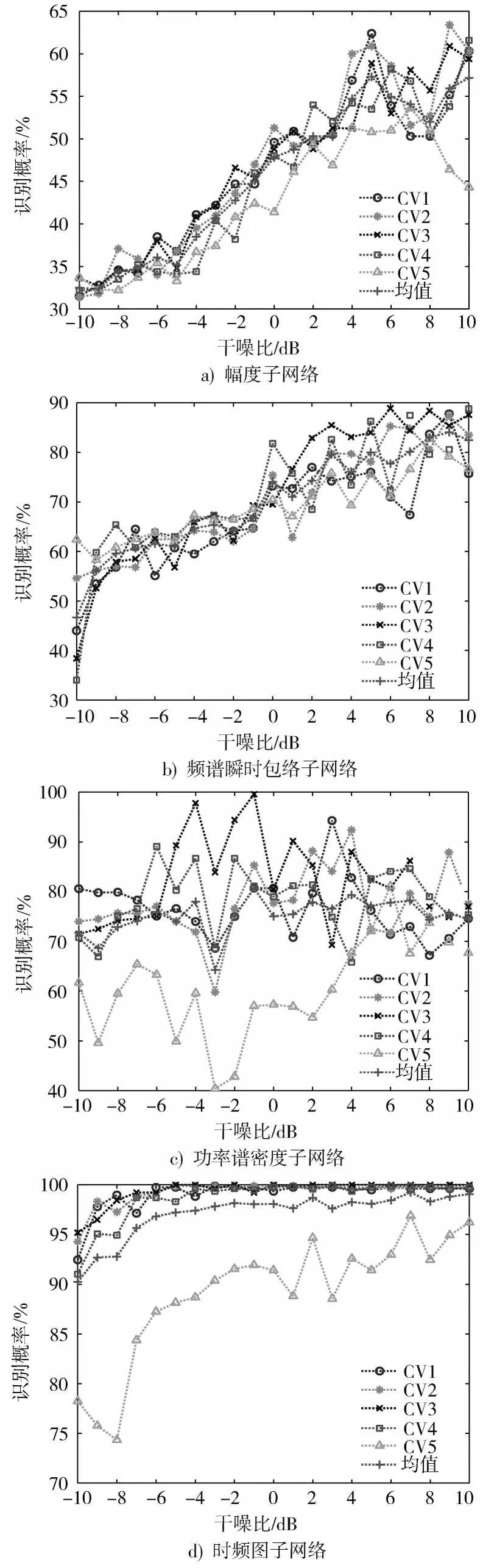
图7 各子网络训练结果
由图7 可以看出:幅度子网络收敛性较差,分类识别效果最弱,且受噪声影响较大;频谱瞬时包络子网络比幅度特征具有更好的分类效果,同样受噪声影响较大;功率谱密度子网络受噪声影响较小,比幅度特征分类效果好,在JNR 小于0 dB 时,分类性能好于频谱瞬时包络特征,在JNR 大于0 dB 时,分类性能略弱于频谱瞬时包络特征;时频图子网络对目标的分类性能最好,平均识别准确概率能达到90%以上。
集成网络使用简单的softmax 分类器,其训练结果如图8 所示。
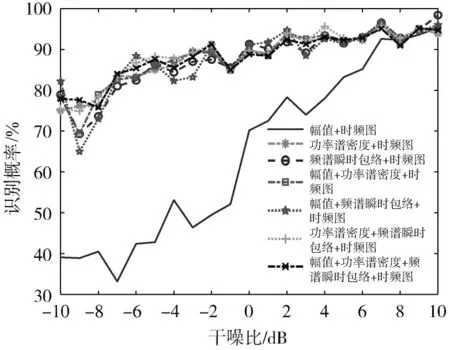
图8 七种集成网络训练结果
由图8 可以看出,集成网络训练效果优于一维特征子网络且与一维特征子网络分类效果相关。其中,幅度子网络收敛性差,与时频图子网络集成后训练效果也最弱,有幅度特征的集成网络训练效果都弱于没有幅度特征的集成网络,进一步说明幅度特征对干扰分类的作用效果不好;功率谱密度与时频图集成网络的训练效果和频谱瞬时包络与时频图集成网络训练效果相近;功率谱密度、频谱瞬时包络与时频图集成网络训练效果整体最好,这是因为功率谱密度反映单位频带内信号功率随频率的变化情况,频谱瞬时包络包含了信号幅度、频率与相位信息,它们与时频图组合能够更加全面地反映信号的特征。
3.3 测试过程
将测试样本集输入到训练好的网络模型得到各网络的测试结果,如图9 所示。
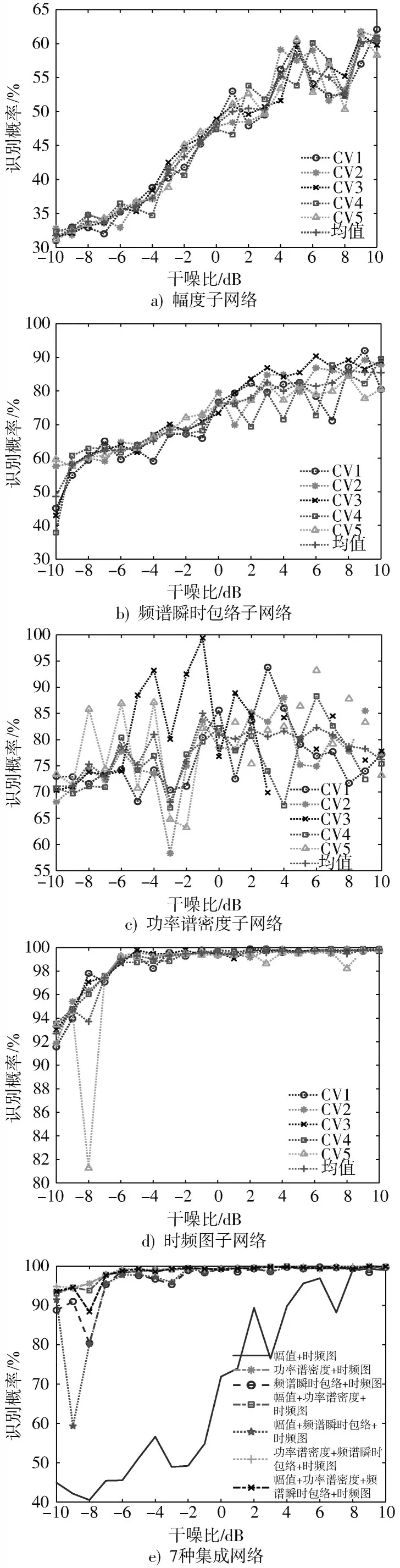
图9 各种网络测试结果
与图7 和图8 对比可知,无论JNR 如何变化,各类型网络测试结果普遍优于训练效果,测试结果与训练效果趋势保持一致,说明网络已训练完全。7 种集成网络中,功率谱密度、频谱瞬时包络与时频图集成网络测试效果最优,好于所有集成网络和子网络,具体而言:在JNR 为-10 dB 时,功率谱密度、频谱瞬时包络与时频图集成网络识别准确概率达到94.8%,高于幅度、功率谱密度、频谱瞬时包络与时频图集成网络1.2%,高于功率谱密度与时频图集成网络1.2%,高于频谱瞬时包络与时频图集成网络6%,高于幅度、功率谱密度与时频图集成网络1.8%,高于幅度、频谱瞬时包络与时频图集成网络3.4%,高于时频图子网络检测概率2.2%。
3.4 与其他检测方法比较
将分类识别效果最好的功率谱密度、频谱瞬时包络与时频图集成网络与其他经典检测算法进行比较。用于比较的深度网络检测器有:基于时频图的AlexNet 检测器[7]、基于功率谱密度序列的LSTM 检测器[12]、基于特征融合的双通道检测器[21]。其中,基于特征融合的网络检测器以功率谱密度序列与时频图为输入,设计特征融合层对两通道提取到的融合特征进行分类识别。各检测器的检测结果如图10 所示。
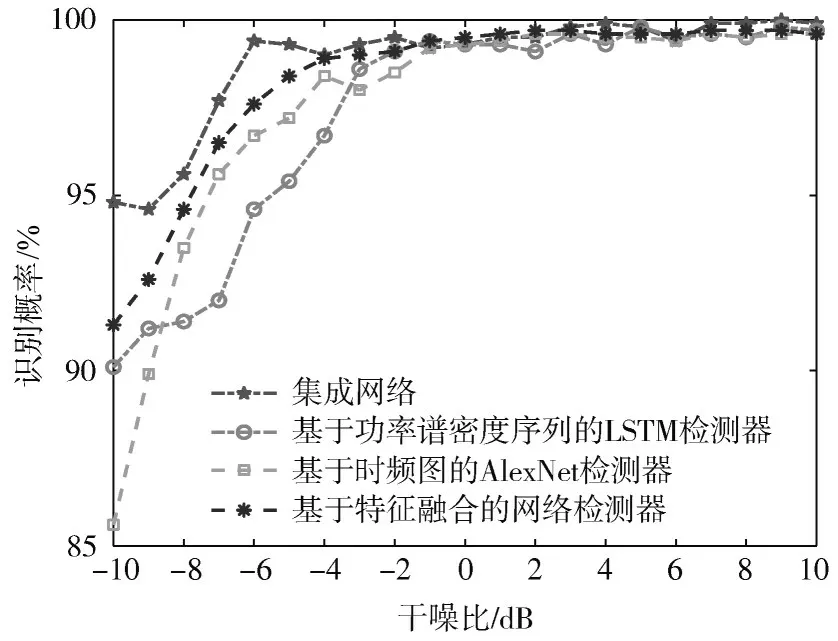
图10 各检测器的检测结果
由图10 可知:在JNR 大于-8 dB 时,4 种深度网络检测器的干扰识别准确概率都达到90%以上,具有良好的检测性能,并且本文所提的基于多维特征神经网络集成方法性能更优,在JNR 大于-6 dB 时,对6 种有源干扰识别准确概率达到99%以上。这是因为,集成网络输入数据形式有功率谱密度、频谱瞬时包络和时频图,包含时域、频域、时频域的丰富信息,且神经网络集成的方法能有效提高网络系统的泛化能力,减少了训练样本对检测结果的影响,进而提高了识别概率。基于特征融合的网络检测器数据输入形式为功率谱密度序列和时频图,也是联合特征域的表现,比单一数据输入网络性能更优。而单一时频图输入与单一功率谱密度序列输入相比,时频图包含时频域更多的信息,故基于时频图的AlexNet 检测器优于基于功率谱密度序列的LSTM 检测器。
4 结论
针对在强噪声环境下雷达有源干扰识别准确率不高的问题,本文提出了一种基于功率谱密度、频谱瞬时包络与时频图特征神经网络集成的干扰识别算法。通过提取干扰信号的二维时频分布与幅度、功率谱密度、频谱瞬时包络等一维特征,利用Stacking 策略集成网络实现对6 种有源干扰的准确分类,相比于基于时频图的AlexNet 检测器、基于功率谱密度序列的LSTM 检测器、基于特征融合的双通道检测器等经典检测算法,该算法在强噪声环境下具有更好的检测性能。
