基于点云的地铁盾构隧道环内管片错台量与 接缝张开量检测方法*
2023-10-08KIMILBOM李文海张东亮高利业
鲍 艳 KIM IL BOM 李文海 张东亮 高利业
(北京工业大学城市与工程安全减灾教育部重点实验室, 100124, 北京∥第一作者, 副教授)
0 引言
盾构法施工对地面交通和建筑物的影响小,施工速度快,安全性高,已成为地铁隧道施工的主要方法,在地铁建设中的使用占比已超过85%[1-3]。管片是盾构隧道主要装配构件和主要承载结构。地铁盾构隧道施工及运营中管片错台与张开是常见的现象。
许多学者通过有限元数值模拟或现场试验进行了盾构隧道管片错台量与张开量发生原因、变化规律及防止措施等研究[4-7],但针对现场检测方法的研究甚少。目前管片纵缝错台量与接缝张开量的检测手段主要是人工巡检,首先通过目测寻找错台和张开发生的位置,然后采用卡尺、塞尺等工具进行测量。由于隧道内光线条件差或发生位置在顶部,极易出现漏检,因而现有检测法存在检测精度和检测效率较低的问题。
三维激光扫描技术利用激光测距原理,快速获取密集点云的三维坐标和反射率等信息,在地形测量、建筑结构、道路、管道、滑坡、隧道检测等诸多领域中得到了广泛应用[8]。盾构隧道环内管片错台量检测研究中,有学者基于轨道的移动三维激光扫描系统获取强度信息灰度图,确定管片拼装位置,进行管片错台量的检测[9-10];有学者基于运营期移动三维激光扫描点云提取断面,在断面上进行错台量分析[11]。但目前移动式扫描系统仅在有轨的环境下进行作业,不能检测施工或竣工隧道管片错台量及张开量。有学者通过架站式三维激光扫描仪获取铺轨前竣工盾构隧道点云,实现隧道断面连续提取,在断面上检测环内错台量及张开量[12-13],但由于同一环内断面提取位置不同而错台量及张开量检测值也会不同,不能够全面反映管片拼装实际情况。
为了快速准确地实现任意盾构隧道环内管片错台量与张开量的检测,本文基于架站式扫描仪扫描盾构隧道获取点云,提出了提取中轴线的旋转投影法,根据精度较高的中轴线获取隧道管片三维展开点云与环内管片拼装接缝处点云,进而实现环内管片错台量与张开量的全面检测及拼装实际情况的分析。
1 提取中轴线旋转投影法
中轴线是表示隧道走向的空间曲线,目前提取中轴线方法较简单,大多采用的是双向投影法[14-15]。但该方法由于只利用隧道上下左右4个位置的边界点云,易受噪点的影响,中轴线提取精度不高。因此本文提出了采用旋转投影法提取中轴线,该方法首先将隧道点云进行坐标旋转变换,提取不同旋转坐标系下的隧道上下左右位置的边界点云,通过旋转投影边界点计算中心点,采用最小二乘法和RANSAC算法拟合出高精度隧道中轴线。该方法具体步骤如下:
步骤1:隧道点云在原始坐标系下分别投影至xoy和yoz平面上,将投影点云沿y轴方向(隧道前进方向)进行分割,每段点云的切割厚度为Δε。对于每段分割段点云,在xoy投影面上搜索x最大值和最小值的两个左右边界点,同样在yoz投影面上搜索z最大值和最小值的两个上下边界点。边界点提取示意图如图1所示。
通过边界点坐标计算每段的中心点的坐标:
(1)
式中:
xi,center——每段分割点云中心点x轴坐标值;
zi,center——每段分割点云中心点z轴坐标值。
步骤2:将点云以y轴为旋转中心轴进行旋转,旋转角度为α,转换后的隧道点云坐标(x′,y′,z′)为:
(2)
旋转坐标系下采用步骤1的方法获取边界点及中心点坐标,该边界点是断面上与双向投影边界点不同位置的点,如图2所示。
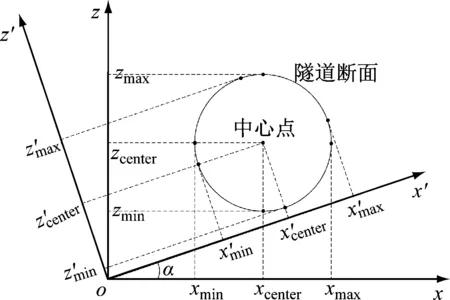
注:下标center表示中心点;max表示最大值;min表示最小值。
原始坐标系上的中心点的坐标为:
(3)
步骤3:0到π/2之间选择不同旋转角度,以提取隧道表面不同位置边界点云,通过步骤2的原理进行几次坐标旋转并获取相应的边界点云及中心点坐标。
步骤4:将原始坐标系与多个旋转坐标系下获取的中心点采用最小二乘法和RANSAC算法拟合出中轴线相应的方程:
(4)
式中:
xk、zk——通过k次坐标旋转投影x轴和z轴坐标值;
akj、bkj——通过k次坐标旋转投影中轴线j次项的参数。
通过多个旋转投影中轴线方程参数求得隧道中轴线方程的参数:
(5)
式中:
aj、bj——中轴线方程的j次项参数;
n——坐标旋转变换总数。
最终中轴线方程为:
(6)
2 环内管片错台量与张开量检测原理
2.1 点云三维展开
由于隧道衬砌表面与半径处垂直,错台量是接缝处两个管片点云到中轴线距离差值,张开量是接缝处的周长与设计值差。为了计算方便,通过极坐标转换获取隧道三维展开点云。
根据隧道中轴线空间关系,将隧道原始点云进行转正,转正后隧道中轴线与y轴是平行关系,转换后坐标为:
(7)
式中:
α1——xoy投影面上中轴线与y轴的斜角;
α2——yoz投影面上中轴线与y轴的斜角。
图3为隧道点云三维展开原理图。如图3所示,x轴对应隧道的周长,y轴对应管片宽度,z轴对应隧道点云到中轴线距离与设计半径差值(径向偏差)。将隧道点云三维展开,展开点云坐标为:

注:L为弧长。
(8)
式中:
R——隧道设计半径值。
2.2 环内管片错台量及张开量检测
2.2.1 错台量检测原理
图4为管片错台量检测原理图。如图4所示,将拼装接缝处附近两个管片展开点云投影至yoz平面上,在投影平面上沿y轴方向将拼装处点云进行分割,厚度为δ,在每段分割点云中搜索z最大值的边界点。利用最小二乘法和边界点云拟合出管片边界线,拟合边界线之间z轴方向间距为错台量。

a) 管片边界点云
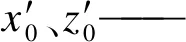
2.2.2 张开量检测原理
图5为管片张开量检测原理图。如图5所示,将两个管片接缝处展开点云投影至xoy平面上,在投影平面上沿y轴方向进行分割,厚度为δ,在每段分割点云中搜索第一个管片x最大值的点和第二个管片x最小值的点。对于两个管片边界点云,采用最小二乘法拟合出相应的边界线,两边界线之间x轴方向间距D与管片嵌缝设计值D0差值为管片张开量Δ,即Δ=D-D0。
a) 管片边界点云
3 工程应用
3.1 工程概况
依托北京地铁某工程盾构段,利用徕卡P40架站式扫描仪获取竣工盾构隧道某一段扫描点云。该盾构隧道拼装采用方法为错缝拼接,管片内径为7.9 m,宽度为1.6 m,每环8个管片。从楔形管片F块开始,其他7个管片逆时针依次记为L1、B1、B2、B3、B4、B5、L2,其中F块对应的角度为16°21′49″,B1、B2、B3、B4、B5五个标准块和L1、L2两个邻接块对应的角度为49°5′27″,如图6所示。

图6 管片拼装示意图
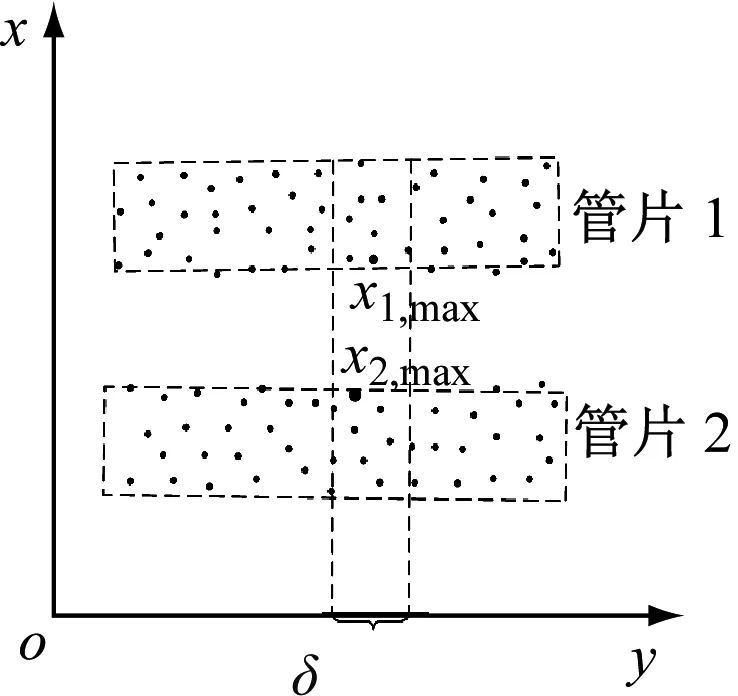
管片接缝宽度设计值为23 mm,如图7所示。
图7 管片接缝宽度设计图
3.2 隧道中轴线提取
按照本文旋转投影法提取中轴线。选择不同旋转角度,提取隧道表面不同位置边界点云,结果如表1所示。利用旋转投影边界点云拟合出中轴线,结果如图8所示。

表1 坐标旋转次数、旋转角度及中轴线计算时间

a) 原始点云

(9)
式中:
N——扫描点云数。
表2为不同旋转投影次数的中轴线偏差对比表。如表2所示,采用双向投影法提取的中轴线与隧道点云之间距离偏差为15.7 mm;随着旋转投影次数的增加中轴线拟合偏差变小,旋转投影次数达到3次时偏差最小,为7.5 mm;旋转投影次数大于3次,该偏差变化不明显,为8.0 mm左右。说明旋转投影法与双向投影法相比其中轴线拟合精度更高,旋转次数为3次时提取的中轴线与点云的拟合精度最高,该中轴线为隧道的最终中轴线。
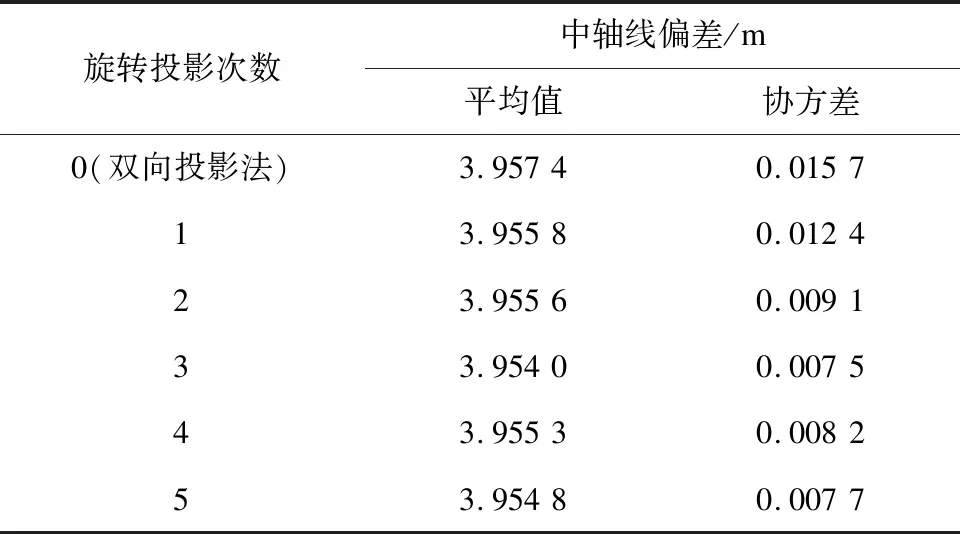
表2 不同旋转投影次数的中轴线偏差对比
3.3 管片错台量和张开量分析
本文以北京地铁某工程盾构隧道衬砌一环管片点云为例进行错台量和张开量的分析。
按照前文方法,根据中轴线获取环内三维展开点云,如图9 a)所示。展开点云中提取y轴方向厚度为3 mm的展开点云,通过点云间距变化与管片拼装设计值寻找管片拼装接缝处位置,如图9 b)所示。根据拼装接缝位置,提取接缝处两个管片展开点云,每环隧道由8块管片拼装而成,环内存在8处拼装接缝。
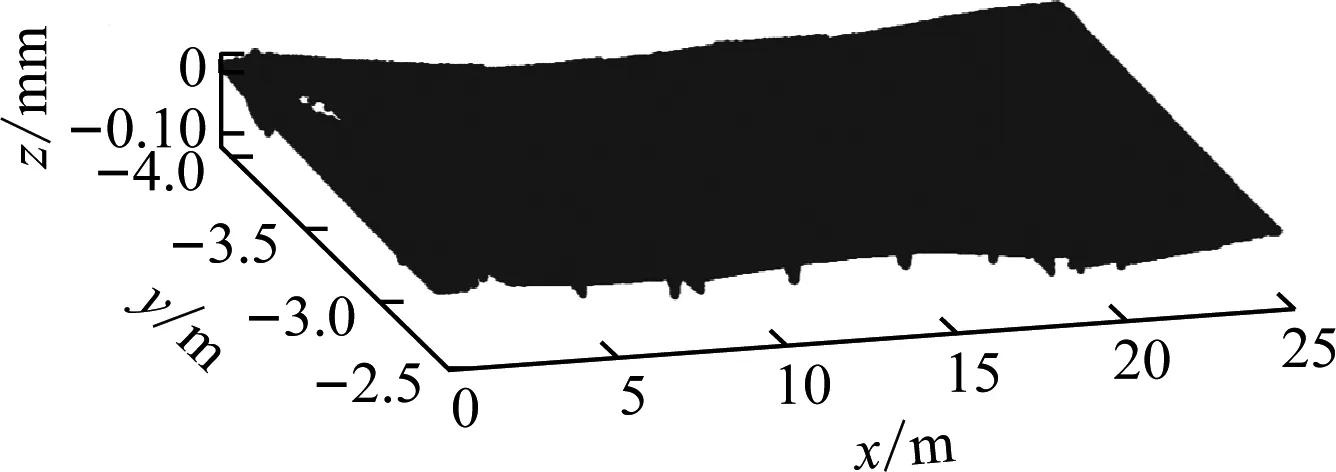
a) 管片展开点云
以B3-B4管片接缝处为例,进行环内管片接缝处错台量与张开量检测及分析。图10为B3-B4管片接缝处点云。徕卡P40扫描仪可扫描到接缝空隙处B3管片内侧,接缝处B3管片垂直方向点云厚度较厚。将B3-B4管片接缝处点云投影至xoy、yoz投影面上提取边界点云,通过两个管片边界线计算错台量与张开量。
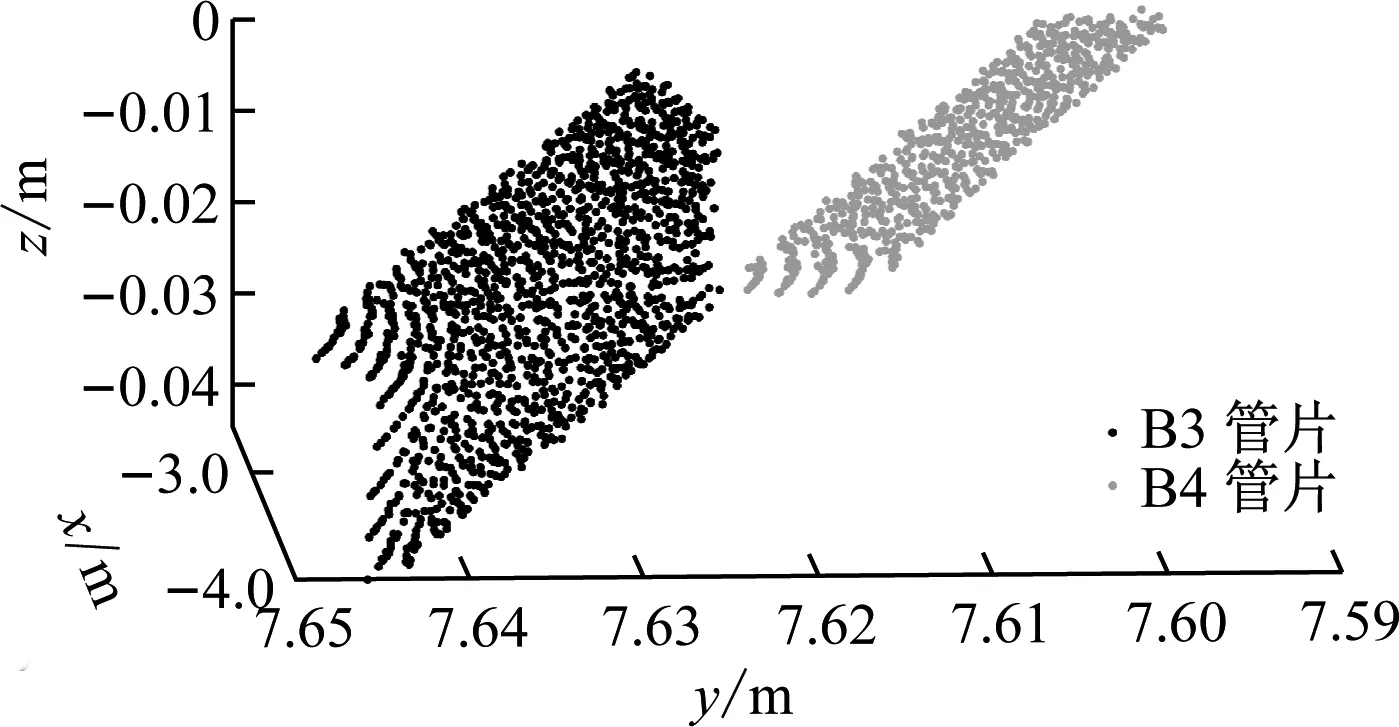
图10 B3-B4管片接缝处附近展开点云
图11为B3-B4管片拼装处错台量与张开量分析图。从图11 a)可以看出,在yoz投影面上,B3管片对B4管片的相对错台量为-5.6~2.1 mm,接缝始处B3管片比B4管片凹陷了5.6 mm,但接缝尾处B3管片比B4管片突出了2.1 mm,平均错台量为-1.7 mm,这说明接缝处B3管片比B4管片平均凹陷1.7 mm。

a) yoz投影面下边界点与边界线
从图11 b)可以看出,在xoy投影面上,B3管片与B4管片间距为19.5~18.1 mm(管片接缝宽度设计值为23.0 mm),张开量为-4.9~3.5 mm,平均张开量为-4.2 mm,沿着y轴(管片宽度)接缝张开量逐渐变小。
通过每个接缝处点云计算错台量与张开量范围及平均值,结果如表3所示。由表3可见:B1-B2、B2-B3、B4-B5、B5-L2、L2-F五处接缝张开量均大于0,说明这五处管片接缝有向外扩张的趋势;B3-B4、F-L1、L1-B1三处接缝张开量小于0,说明这三处管片接缝有向内压缩的趋势。错台量是接缝处两个管片之间的相对位移,错台量大于0表示接缝处第一个管片比第二个管片突出,错台量小于0表示第二个管片比第一个管个片凹陷。从表3中可以看出:L1-B1接缝处错台量最大,为4.5 mm,说明L1管片比B1管片平均突出了4.5 mm;B5-L2接缝处错台最小,为-2.1 mm,说明B5管片比L2管片平均凹陷了2.1 mm。8个接缝处错台量都小于8 mm,满足规范规定成型隧道验收的允许偏差。如表3所示,根据本文方法检测的错台量与张开量平均值与现场卡尺、塞尺检测值对比,错台量最大误差为1.5 mm,平均误差为0.75 mm,张开量最大误差为1.4 mm,平均误差为0.55 mm,满足检测要求。

表3 环内管片错台量与张开量检测表
4 结语
以北京某地铁盾构隧道为研究对象,基于三维激光扫描点云研究了检测隧道环内错台量及张开量的检测原理。首先采用本文所提出的旋转投影法提取中轴线,拟合出精度较高的中轴线,保证隧道检测后续数据处理精度;根据中轴线获取管片展开点云及拼装接缝处管片点云,通过接缝处两个管片拟合边界线的空间关系,实现快速而准确的盾构隧道管片拼装错台量与张开量的检测,并以实际工程为案例进行了分析。
旋转投影法与双向投影法相比,中轴线拟合精度更高;随着旋转投影次数的增加,中轴线拟合精度也越高,计算时间也越长。投影次数3次以上后提取中轴线拟合精度变化不明显,点云与拟合中轴线的偏差为7.5 mm,考虑计算时间建议最合适的投影次数为3次。检测出环内管片错台量与接缝张开量的变化及平均值,进而分析管片拼装实际情况,为施工、竣工及运营隧道检测提供参考。
本文的检测方法在隧道中轴线提取、错台量与张开量检测上达到了较高精度,但管片拼装接缝处噪点较多时对检测精度的影响较大,需针对性改进算法。
致谢:北京市政建设集团有限责任公司在本文的数据上给予了大力支持,在此特别感谢!
