基于分数布朗运动过程模型的混合随机退化设备剩余寿命预测
2023-09-27高旭东胡昌华张建勋杜党波
高旭东 胡昌华 张建勋 杜党波 喻 勇
随着科学技术的不断进步与发展,在实际工程中,设备内部结构的复杂性、运行载荷和外部环境的多变性也随之不断增加,导致设备的退化过程通常具有随机性、阶段性、多样性、相关性和混合性等特征[1-2],这给设备的健康管理带来了一定的难度和挑战.为了避免由于退化失效而造成人员与财产损失,有必要研究该类设备的退化建模与剩余寿命(Remaining useful life,RUL)预测问题,进而保障其安全、可靠运行.但是,如何准确预测此类随机退化设备的剩余寿命仍是目前研究的难点与热点问题.
在实际工程中,常常会遇到混合退化过程的设备[1-2],但现有文献处理方法是将设备的退化过程简化成单一的线性或非线性Wiener 过程[3-9],可以比较容易得到设备RUL 的解析解.例如对于具有线性扩散项的维纳退化过程,Si 等[3]研究了三层不确定因素影响下线性随机退化系统的RUL 预测方法;Huang 等[4]在文献[3]基础上,提出一种带自适应漂移系数的隐线性Wiener 模型,用以描述设备的退化轨迹,引入自适应漂移参数及测量噪声,同时考虑设备历史数据及测量噪声问题,进一步提高了设备RUL 的预测精度;王玺等[5]基于线性Wiener 过程,针对新研发光电产品提出一种剩余寿命自适应预测方法,克服了现有RUL 预测方法中,当前时刻估计的随机参数与上一时刻随机参数的后验估计完全相等的潜在假设,进而提高了RUL 的预测准确性.
对于具有非线性扩散项的Wiener 退化过程,Si 等[6]使用时空变换方法,获得了RUL 的近似解析解.司小胜等[7]考虑了退化过程中的测量不确定性,然后根据维纳过程的统计性质,建立一个状态空间模型预测RUL,但是RUL 的分布中未考虑测量不确定性.郑建飞等[8]在文献[7]基础上,还考虑了个体差异的不确定性,并在RUL 分布的推导中考虑了测量不确定性和个体差异性,进一步提高了RUL的预测精度.Cai 等[9]考虑了退化量与监测量之间的非线性关系,推导得到了其RUL 的概率密度函数(Probability density function,PDF),且通过激光器数据验证了该方法能够明显提高预测精度并降低预测结果的不确定性.
但是,这些退化过程都有两个潜在的假设: 1)假设设备的退化过程是一种单一的线性或非线性退化形式,忽略了各种退化形式在整个退化过程所占的比重是不同的,影响效果是有差别的;2)假设设备的退化过程是一种无记忆效应马尔科夫过程,忽略了监测数据之间可能存在的长期依赖性和相关性对RUL 的预测具有一定的影响.例如在发动机引擎性能退化数据[10]、高炉的性能退化数据[11-12]、锂电池的性能退化数据[13]等数据中发现了记忆效应,即未来退化状态受到当前状态与历史状态的共同影响.文献[14]在分数布朗运动(Fractional Brownian motion,FBM)的框架下,建立了设备的退化模型,使用复杂弱收敛定理将FBM 近似为标准布朗运动(Brownian motion,BM),然后推导了RUL 的PDF.文献[15]建立了考虑退化状态之间存在相关性的新型退化模型,并将其应用于高炉与发动机性能退化数据中,通过求取RUL 数值PDF 的方式验证了此方法的有效性和优越性.文献[16]在文献[15]基础上,使用更为简单的弱收敛理论推导了RUL的近似PDF,避免大量的数值积分,同时考虑随机效应的影响,并通过锂电池性能退化数据进行验证,验证结果表明,该方法能够有效提高RUL 的预测精度.但是,现有基于FBM 过程模型的设备RUL预测方法最大的不足是均未实时更新模型中的相关参数,仅利用同批设备的历史退化数据对模型中的未知参数进行估计.此外,文献[15]从结构组成和退化机理两个方面分析了惯性导航陀螺仪的随机退化过程具有混合性特征.相比于传统单一退化形式的Wiener 过程对设备的随机退化过程建模,通过建立混合随机退化模型,能够进一步提高RUL 预测精度.文献[15]详细论述和证明了考虑退化过程的混合性,能够提高设备RUL 的预测精度.
鉴于此,本文将重点研究在记忆效应影响下同时包含线性退化过程和非线性退化过程的混合随机退化设备建模与RUL 预测问题.主要关注以下3个问题: 1)如何建立存在记忆效应的混合退化过程模型;2)如何在首达时间(First hitting time,FHT)条件下,推导设备RUL 的解析表达形式;3)如何根据监测数据实时更新退化模型参数,并实现RUL分布的自适应更新.针对以上3 个问题,本文首先建立了一种基于分数布朗运动的混合退化模型,考虑了记忆效应对未来退化过程的影响;进一步,在弱收敛性理论和FHT 的概念下,推导了混合退化设备RUL 的近似解析表达式;然后,利用共性参数离线估计和随机参数自适应更新的策略,实现RUL的自适应预测;最后,将本文方法应用于数值仿真例子和陀螺仪的监测数据上进行验证.
1 基于FBM 的混合随机退化模型
首先,令X(t)表示混合退化设备在t时刻的退化量.基于上文的具体分析,受记忆效应影响的混合退化设备模型由以下3 部分组成[15]: 1)线性退化元件引起的线性退化过程;2)非线性退化元件引起的非线性退化过程;3)含有记忆效应的随机波动.因此,在文献[11]基础上,在t时刻,基于FBM 混合退化模型可以表示为:
式中,X(0)表示混合退化设备的初始退化状态,为了不失一般性,假设X(0)=0 (在实际中,若X(0)≠0,可以通过平移手段将其转化为零[16-17]).λt代表混合退化设备的线性趋势代表非线性退化趋势;令λ和α为随机变量,用于描述由结构差异、外部环境等差异引起的同批设备中不同个体差异性.β和σ是共性参数,用于反映同批设备的共同特性[18-19].为了刻画线性退化部分与非线性退化部分之间的相关性,本文假设λ和α服从二维正态分布.另外,BH(t)为分数布朗运动,描述了退化过程中带有记忆效应的随机波动性.
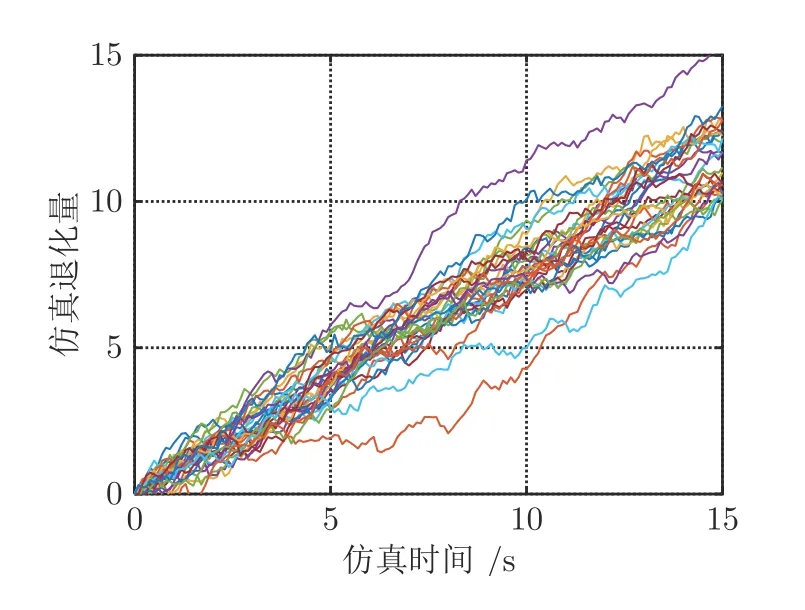
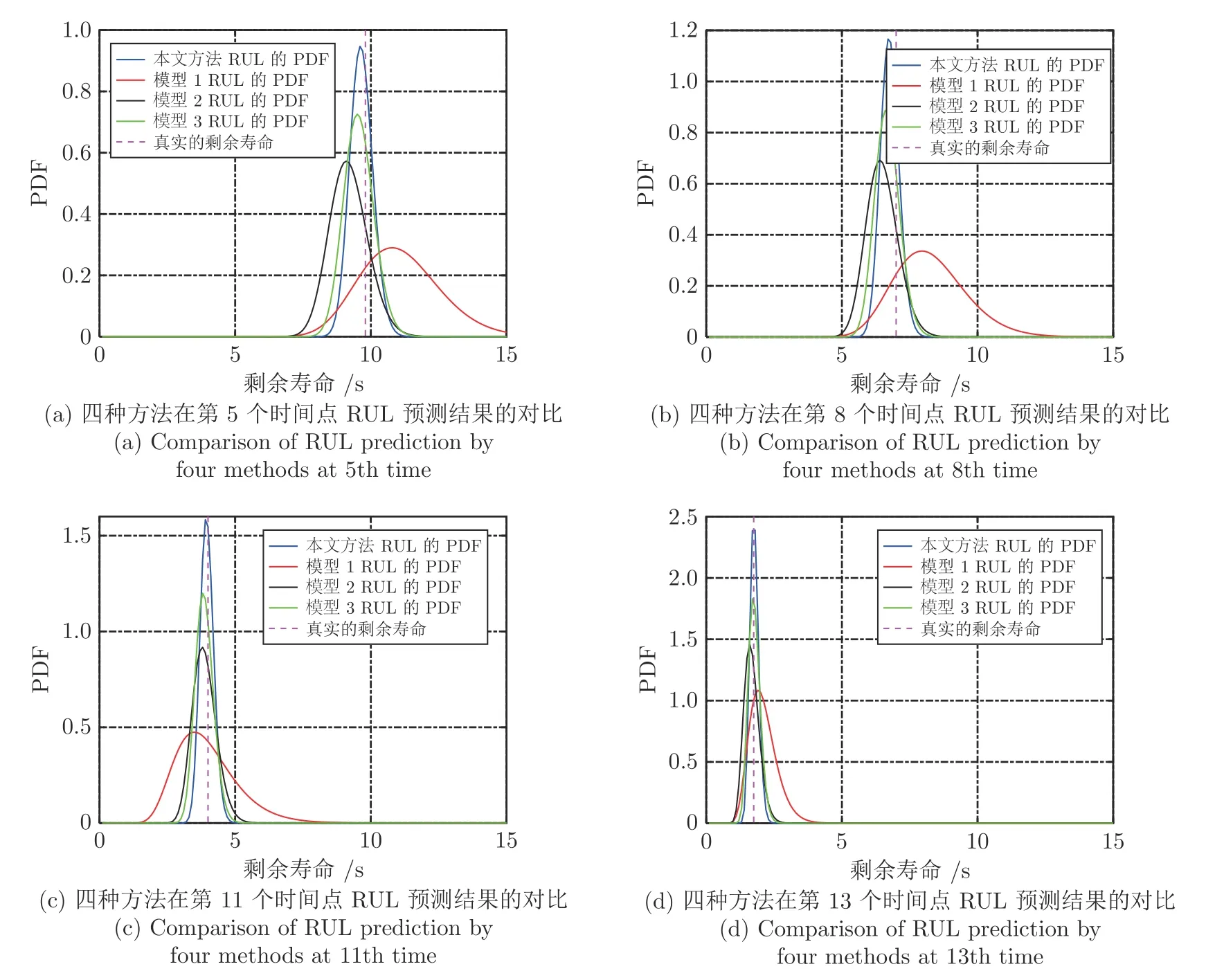
定义 1[13,20]. 赫斯特指数H的取值区间满足0 的中心化高斯过程[21]: 式中,KH(t-s)定义为: Γ(·)为伽马函数,具体形式为: 由式(3)可以看出,FBM 是BM 增量的非线性移动平均值[20],这进一步引入了记忆效应,其中: 为了简化σB的计算,假设式(1)中的BH(t)为标准FBM[13].标准FBM 满足[21]: 1)BH(0)=0 且 E (BH(0))=0; 2)∀t≥0,E(BH(t)2)=t2H; 3)分数布朗运动具有自相似性和平稳增量; 4)分数布朗运动的样本轨道是连续但几乎不可微的; 5)当 1/2 因此对于任意的λ∈R,α∈R,σ∈R当且仅当 1/2 注1.FBM 是一种具有长期依赖性、自相关性的连续非马尔科夫过程[20],其增量是固定且相关的,并且引入了长程相关的结构[22-23].赫斯特指数H可以测量整个退化轨迹之间的长期依赖性.根据H的不同,FBM 可以分为三种类型,当 0 基于FHT 的定义[25],当失效阈值为ω时,目标设备在任意时间tk的剩余寿命Lk定义如下: 基于式(1)、式(7)和弱收敛理论[26]推导得到目标设备RUL 的近似PDF,如定理1 所述.定理1 考虑了关于FBM 的更简单的弱收敛方案,提出了基于FBM 过程的混合退化模型的RUL 分布. 式中,ωm,k=ωm-xm(tk),=h(tk+lk)-h(tk),=h(tk+lk+∆l)-h(tk+lk). 定理1 的证明见附录A. 下面对混合退化模型中的未知参数进行实时估计更新,从而实现混合退化设备RUL 的自适应预测. 式中,λ0与α0分别表示随机参数λ和α的先验值,将其联合先验分布记作π0∼ρ0). 为了方便推导,令: 假设同批次不同设备个体之间的历史退化数据都是互不相关的.因此,对第m个随机退化设备的所有历史监测数据可以进一步写为: 定理2.Xm的联合分布为多元正态分布,其均值与方差如下: 定理2 证明见附录B. 根据定理2 可以得到模型参数 Θ 的似然函数如下: 式(19)对µλ0和µα0分别求一阶偏导,可得: 将式(22)、式(23)代入式(19),可得: 可以看出,似然函数(24)具有高维的特征,直接把式(24)极大似然化很难得到其余参数的极大估计值.本文首先利用Matlab 中的fminsearch 函数,求取极大似然估计值(该函数基于Nelder-Mead 单纯形法对最小化执行同步多维搜索),进而得到参数的估计值;然后,将其代入式(22)、式(23),得到相应µλ0、µα0的极大似然估计值;最后,采用贝叶斯推理方法,利用设备的实时退化监测数据对随机参数进行实时更新. 第3.1 节通过参数离线估计的方法得到了随机参数λ和α的联合先验分布,下面对随机参数进行实时更新.假设第m个设备在前tk时刻一共获得k个退化监测数据Xk∗,记作: 式中,ti(i=1,2,···,k)表示对应的退化监测时刻. 基于贝叶斯推理理论,利用获得的退化数据更新λ和α的联合后验分布,即: 将估计得到的联合分布π0(λ,α)、式(27)代入式(26),对λ和α的联合后验分布进行更新,具体更新结果如下: 基于式(29)、式(30),λ和α在tk时刻联合后验分布中的相关参数可以由下式得到: 将第3.1 节参数的离线估计与第3.2 节参数的实时更新归结为算法1.至此,完成了模型里面随机参数的实时更新.下面将本文方法应用到数值仿真和陀螺仪实际退化监测数据中. 算法1.参数的离线估计与实时更新算法 本节将本文所提方法应用到数值例子与实际例子中,验证其是否有效.采用线性退化模型、非线性退化模型和本文提出的模型来拟合退化数据,并且比较在三种模型下设备RUL 的预测结果.三种模型为: 1)本文设计的模型;2)模型1.基于带线性漂移 的Wiener 过程模型[5];3)模型2.基于带非线性漂移的Wiener 过程模型[8,27];4)模型3.基于带非线性漂移的FBM 过程模型(单一退化形式)[13-14](未考虑随机系数的实时更新). 1)仿真数据 图1 30 组仿真历史退化数据Fig.1 30 sets of simulated history degradation data 图1 是30 组仿真退化轨迹,仿真监测时间为0~15 s,采样间隔为0.1 s,每条轨迹共150 个采样点.图2 为其中任意一条退化轨迹.作为带预测设备的实时监测数据,为了简单化,将该轨迹的最后一个监测数据X(15)=13.1 作为失效阈值,即ω=13.1.则该设备的剩余寿命可近似为14.8 s. 图2 待预测设备实时监测退化数据Fig.2 Real-time monitoring degradation data of the equipment for prediction 下面利用图2 的仿真退化数据对本文所提模型和RUL 预测的有效性进行验证. 2)结果对比 为了比较的公平性,模型2、模型3 中的非线性部分也采用幂函数的形式.首先,基于历史退化数据,采用极大似然估计算法得到共性参数与随机参数的先验估计值.为了对比度量四种模型之间的拟合的精准度与估计的准确度,使用赤池信息准则(Akashi information criterion,AIC)[28]、贝叶斯信息准则(Bayesian information criterion,BIC)[29]测量预测模型的拟合程度.AIC、BIC 的值越小,则拟合程度越高;反之,则拟合越差.AIC 的具体公式为: 式中,L(Θ)表示似然函数值,p是未知参数的总个数. BIC 引入了改进惩罚项,惩罚项大于AIC 的,可以有效避免大样本的过拟合问题,其具体表达式为: 式中,L(Θ)表示似然函数值,p是未知参数的总个数,n为样本数据量. 表1 为四种模型参数(本文方法、模型1、模型2、模型3)的先验估计值. 表1 四种模型参数的先验估计值Table 1 The parameters' prior estimates of the four models 由表1 可知,本文方法的AIC 与BIC 值最小,并且其中的3 个方差参数总体也比较小,这说明本文模型参数估计的准确性更高.主要原因是本文所提模型既考虑退化过程的混合性,还考虑了退化状态之间可能存在的相关性. 得到参数的离线估计值后,基于待预测设备的实时监测退化数据,采用贝叶斯更新的方法实现λ和α的实时更新,进而实现RUL 的实时预测.图3是本文模型中λ和α的实时更新过程. 图3 随机参数的实时更新过程Fig.3 Real-time updating process of random parameters 由图3 可以看出: 1)随着仿真退化数据的不断获取,随机参数不断实时更新;2)ρ的实时更新值为负,表明λ和α是负相关,进一步表明混合随机退化设备的线性退化部分与非线性退化部分是相互抑制的. 下面对比在四种方法下得到的RUL 实时预测结果.预测时间点共取10 个,从第5 个时间点(第50 个采样点)到第14 个时间点(第140 个采样点),间隔为10 个采样点,具体RUL 对比见图4.同时选取第5、8、11、13 个时间点的RUL 预测结果,通过二维平面图形式做进一步对比,对比图如图5所示. 图4 4 种方法在各个时间点处RUL 预测的对比Fig.4 Comparison of RUL prediction by four methods at each time 图5 四种方法在第5、8、11、13 个时间点RUL 预测结果的对比Fig.5 Comparison of RUL prediction by four methods at 5,8,11,13th time 在图4 和图5 中,蓝色曲线为本文方法RUL的PDF,红色曲线为模型1 得到的PDF,黑色曲线为模型2 得到的PDF,绿色曲线为模型3 得到的PDF.可以看出: 1)四种模型随着获取的退化数据增多,RUL 预测的精度越来越高;2)本文方法得到的RUL 的PDF 能够更好地覆盖真实的RUL,其预测均值更接近真实的RUL,较模型1、模型2、模型3 得到的PDF 精度更高;3)本文方法预测得到的RUL 的PDF 更为尖锐和紧凑,这说明本文方法预测的不确定性比其他三种方法预测的不确定性更小.由图4、图5 可以直观地看出,本文方法优于其他三种方法. 下面从定量的角度分析四种方法的优劣.使用均方误差(Mean squared error,MSE)指标来评价四种方法预测RUL 的精度,其既可以表征RUL 预测结果的准确性,还可以表征RUL 预测的不确定性,是常用的误差评定指标,可以较好地对比不同预测方法的优劣.待测设备在tk的RUL 的MSE 可以表示为: 所有预测时间点处的均方误差之和为总体均方误差(Total mean squared error,TMSE).很明显,TMSE 值越小,则该方法的RUL 预测精度就越高.通过计算得到四种方法在第10 个时间点处的TMSE分 别为1.0051 × 102、5.1308× 103、1.1007×103、1.5041 × 102.通过对比可知,本文方法的RUL 预测精度高于传统模型1、模型2、模型3 的RUL 预测精度;相比于模型1 和模型2,精度约提高了一个数量级.定量分析结果与图4、图5 直观得到的结论是一致的. 陀螺仪是惯性导航系统、导弹制导与控制系统的关键设备,决定着导弹导航与命中的精度.但是,随着陀螺仪工作年限的增加,在外部复杂环境与内部随机应力的影响下,陀螺仪的性能可能会随之发生退化,主要表现在其漂移系数的不断增大,如果漂移系数值增大到一定程度,陀螺仪就无法正常工作,即陀螺仪发生失效. 本文获取的5 组某型号陀螺仪的退化监测数据[30],每组73 个数据,采样间隔为2.5 h,陀螺仪失效阈值设定为0.37 (°/h),陀螺仪寿命约为180.5 h.首先,基于极大似然估计算法,利用其中4 组退化数据[30]对模型参数进行离线估计,得到其先验估计值;其次,利用剩下一组数据为待预测的陀螺仪的实时监测数据,采用贝叶斯更新的方法,对模型随机参数进行实时更新;最后,进行设备RUL 的实时预测,并且将模型1、模型2、模型3 得到的RUL 进行比较.图6 为待预测陀螺仪的实时监测数据. 图6 待预测陀螺仪漂移数据Fig.6 Drift data of the gyroscope for prediction 为了比较公平,模型2、模型3 中的非线性形式和本文模型的非线性部分都采用幂函数形式.调用算法1 中的离线估计阶段得到模型参数的先验估计值,如表2 所示. 表2 陀螺仪退化模型参数的先验估计值Table 2 A parameters' prior estimate of the gyroscope degradation model 下面基于陀螺仪模型参数的先验估计值,调用算法1 中的参数实时更新阶段,在每一个时间点对模型随机参数进行实时更新,模型随机参数的实时更新过程如图7 所示.由图7 可知,随着陀螺仪监测数据获取的增加,模型中随机参数不断实时更新,并趋于稳定状态,这表明随机参数的估计值越来越接近真实的模型参数值. 图7 陀螺仪退化模型随机参数的实时更新过程Fig.7 Real-time updating process of random parameters of gyroscope degradation model 下面选择第152.5 h~175 h 之间的10 个时间点为例,比较分析所使用四种方法对该型号陀螺仪RUL 预测的精准程度.在所选的10 个时间点,四种方法预测该型号陀螺仪RUL 的PDF 如图8 所示.由图8 可知: 1)四种方法预测得到RUL 的PDF在10 个时间点都能够比较好地覆盖真实的RUL,说明了四种方法能够有效地预测该型号陀螺仪的RUL.2)随着监测数据的增加,参数不断实时更新,四种方法预测RUL 的PDF 随着时间变得越来越尖、越来越窄,说明四种方法对RUL 预测的不确定度随着监测数据的累积而不断减小.3)本文方法得到RUL 的PDF 与其他三种方法相比较,其RUL的PDF 明显更高、更紧致,说明本文方法预测得到的RUL 更准确,并且预测的不确定度更小.其原因是,相比于模型1 和模型2 单一的马尔科夫建模方式,本文方法不仅考虑了陀螺仪内部不同类型的随机退化过程,还考虑了退化监测数据之间的长期相关性、记忆性,克服了模型1 和模型2 中的强马尔科夫限制.相比于模型3,本文方法考虑了设备的退化混合性,更符合设备真实的退化过程. 图8 在不同时间点处四种方法预测RUL 的PDF 对比Fig.8 Comparison of RUL's PDFs by four prediction methods at each time 进一步通过计算,得到四种方法在10 个时间点的TMSE 分别为 1.8154×102、2.6321×102、3.6543×102、2.1031×102.可知,本文方法的RUL 预测精度高于其他三种方法. 本文针对随机退化设备,提出一种考虑随机退化过程中退化状态之间可能存在长期相关性、记忆性特点的混合随机退化模型,克服了目前研究中潜在的假设: 1)假设设备的随机退化过程为单一的线性或非线性形式,忽略了设备内部的多种类型退化过程分别对RUL 预测的影响;2)将设备的随机退化过程简化成无记忆效应的马尔科夫过程,受到强马尔科夫性的限制.最后,通过本文方法实现了随机退化设备的RUL 寿命自适应预测,且预测精度高于同等条件下传统模型的预测精度.主要结论有一下3 点: 1)基于FBM 的混合随机退化模型,能够更为准确、合理地描述设备随机退化过程中可能含有的记忆效应.通过实例验证和与传统的建模方法比较,其RUL 预测结果更加精确、不确定性更小; 2)本文采用的参数估计方法有效地利用了设备的历史退化信息和实时监测信息,从而更加准确地实现了设备RUL 的实时预测. 综上所述,本文提出的基于FBM 的混合随机退化模型对随机退化设备建模更为合理与准确,并且RUL 预测结果优于传统方法,具有一定的工程实用价值.下一步的研究方向为如何对预测模型中共性参数进行自适应更新. 附录A 定理1 的证明 基于弱收敛理论,可以将模型(1)转换成式(37).文献[27]指出,时间重新缩放的FBM 保持零均值高斯过程,然后在适当的假设下给出了相应RUL 分布的近似表达式[13].具体来说,考虑以下退化模型: 假设失效阈值为ω,则第m个设备在tk时刻RUL 的PDF 如下: 定理1 的具体使用方法见文献[13]. 附录B 定理2 的证明 根据式(14),可得: 将式(B4)、式(B5)代入式(B3),可得:2 基于混合随机退化模型的RUL 预测
3 随机混合退化模型的参数估计
3.1 共性参数与随机参数的离线估计
3.2 随机参数的实时更新
4 数值仿真与实例验证
4.1 数值仿真




4.2 实例验证




5 结束语