干涉型光纤海洋参数传感器的分布式测量方法研究
2023-09-27郑洪坤吕日清林子婷刘睿杰
郑洪坤 吕日清 赵 勇, 彭 昀 林子婷 刘睿杰
随着我国综合实力的提高,海洋在经济发展、军事安全、科学研究等领域的作用也越来越重要,因而得到了广泛的关注[1-2].传感器作为获取信息的一种重要手段,在海洋监测方面也发挥着越来越大的作用.光纤传感器作为一种新型的无源传感器件,具有灵敏度高、体积小、抗电磁干扰等优点[3-4],已经在很多领域发挥作用.近年来,面向海洋监测应用的光纤传感器也得到了快速发展,大量的海洋参数传感方案被提出,目前主要涉及到海洋的温度、盐度和深度三个参数的测量[5].由于分布式光纤仅对温度和应变敏感,目前光纤传感器的温度盐度深度测量以点式传感器为主.
光纤光栅(Fiber bragg grating,FBG)通常结合敏感材料实现对海洋温盐深参数的测量,通过敏感材料实现灵敏度的放大.中科院半导体所的Wang等[6]通过将FBG 固定在毛细不锈钢管中实现了对FBG 的温度增敏,温度分辨力可以达到0.01 ℃;通过将FBG 和弹性膜片增敏结构相结合可以实现1.57 nm/MPa 的压力测量灵敏度[7];将FBG 和水凝胶相结合[8],利用水凝胶的水分累积和扩散特性将盐度变化转换为FBG 栅区的应变变化,实现了灵敏度为9.5 nm/‰ 的盐度测量.由于FBG 的光谱形状为一个窄带宽的峰值,光谱的大范围高分辨率解调实现较为方便,而且可以通过波分复用技术实现多个传感器的级联.但是基于该原理的传感器灵敏度普遍偏低.
基于该种情况,研究者们提出了多种基于干涉原理的高灵敏海水温度盐度测量方案.2010 年,Liao等[9]通过飞秒激光刻蚀技术在光纤上形成Mach-Zehnder 干涉仪,直接将待测介质作为传感臂,传感器的折射率灵敏度可以达到9148 nm/RIU,可以实现nm/‰量级的盐度灵敏度.本课题组提出了一种同一结构中两种干涉效应共存的传感方案[10],在一个结构中就可以对温度和盐度双参数进行解耦.之后,为了方便传感器的布设,降低外界拉伸对传感器的影响,将透射式传感结构更改为反射式[11].这些基于干涉原理的传感器虽然具有很高的测量灵敏度,但是传感器的复用比较困难.基于干涉原理的光纤传感器的光谱在波长域内是准正弦分布的,传感器的灵敏度和测量范围存在矛盾,虽然已经通过干涉光谱解调算法解决了基于干涉原理的光纤传感器灵敏度和测量范围之间的矛盾[12-14],但是同一系统中通过频分复用技术复用的传感器数量也是有限的.为了解决干涉式光纤传感器的复用问题,本文提出了一种基于调频连续波(Frequency modulated continuous wave,FMCW)技术的复用方案,将反射端面返回的光与参考臂的光形成Mach-Zehnder 干涉仪,用于确定传感器的位置;通过同一传感器不同反射端面间的拍频恢复传感器的光谱.搭建了用于传感器分布测试的系统,编写了数据处理软件用于光谱的采集与处理,通过在系统中接入用于温度盐度测试的级联法布里-珀罗干涉仪(Fabry-Perot interferometer,FPI)探头和用于应变测试的FPI 探头,分别对应海洋环境测试中的温度、盐度、深度这三个基本参数,并测试了实验系统中传感器的响应特性.
1 理论介绍
图1 给出了FMCW 的技术原理图,FMCW 技术利用可调谐激光器(Tunable laser source,TLS)发出频率随时间变化的光,反射光因在光纤中传输表现出相对于参考光的延时特性,通过探测器(Photoelectric detector,PD)探测到参考光和传感光形成的干涉光,通过干涉光的频率反推得到反射端面的位置信息[15-16].假设入射光是调频速度为γHz/s的线性扫频光,入射光经过耦合器分到参考臂和传感臂上,参考臂的电场表达式可以写为:

图1 FMCW 原理示意图Fig.1 Schematic graph of FMCW
其中f0表示扫频光的起始频率,E0为入射电场的幅值,a表示耦合器到参考臂的分光比.
当入射光从反射面返回时,可以表示为一个与入射光存在时间延时的扫频信号:
其中τ表示由于参考臂与传感臂臂长差造成的时延差,具体可以计算为τ=2n∆l/c.r表示传感器端面的反射率.两束光相干之后通过探测器对相干光进行探测,探测得到的光强可以表示为:
可以看出,拍频信号与参考光和传感臂间的时延存在线性对应关系,进而可以通过该方法确定传感臂与参考臂的长度差.图2 给出了参考臂和传感臂光频率的变化情况,两束具有时延的光形成了一个具有固定频率差的干涉信号,这与式(3)是相同的.当系统中的传感臂中存在多个反射面时,会形成多个与参考臂具有不同光程差的干涉信号,根据光程差可以确定反射面所处的位置,通过不同反射端面与参考臂形成的干涉光谱间的拍频,可以反推得到干涉光谱的信息,进而可以实现单个传感器干涉光谱的还原.

图2 参考臂和传感臂频率随时间的变化Fig.2 Frequency changing of reference beam and sensing arm with time
2 仿真分析
本文编写了MATLAB 代码对基于FMCW 技术的传感器复用系统进行了仿真,仿真中采用的系统如图3 所示,仿真中设置可调谐激光器的波长扫描范围为1530 nm~1570 nm,扫频速度大致为10 THz/s,将99%注入到传感系统的传感臂中用于得到较强的反射光.环形器将光注入到复用在传感臂上的传感器中并收集传感器的反射光.用于传感器分光的耦合器分光比为95: 5,并在系统的4 m、5 m 和6 m 位置处设置三个FPI 传感器,通过平衡探测器(Balanced photoelectric detector,BPD)对相干光进行探测.

图3 分布式传感仿真系统图Fig.3 Simulation configuration of the distributed sensing system
图4 给出了系统的仿真光谱,仿真光谱包含了不同位置处反射面的光谱叠加情况,从时域光谱上很难区分不同反射面,采用快速傅里叶变换(Fast Fourier transform,FFT)对叠加光谱进行了频谱分析,可以得到不同反射端面的位置信息.图5(a)给出了傅里叶分析的结果,可以看出,在频谱的4 m、5 m、6 m 位置处出现了3 个特征频率,频谱中的1 m和2 m 处的特征频率则是由于3 个FPI 传感器之间拍频形成的.由于传感臂的反射光很弱,因而传感器间拍频信号的强度也会很弱,可以通过提高参考臂信号强度的方法进一步提高参考光与传感光拍频信号强度,降低传感器之间光谱拍频对光谱恢复的影响.由于每个FPI 都是由相邻很近的两个反射面构成的,为了实现对干涉光谱的恢复,对4 m 处的频谱进行了放大,由图5(b)给出,发现两个端面在频域是可以区分的,因而可以实现对传感器光谱的还原.

图4 仿真得到的系统光谱Fig.4 Simulated spectrum of the system

图5 仿真光谱的频谱特性图((a)仿真光谱频谱特性图;(b)仿真光谱频谱特性分析放大图)Fig.5 Frequency spectrum of the simulated spectrum((a)Frequency spectrum of the simulated spectrum;(b)Partial enlarged drawing of the frequency spectrum)
之后对FPI 光谱的恢复方法进行了研究,利用矩形窗将传感器特征频谱处的复频谱信号截取出来,补零后对其进行反傅里叶变换,得到还原光谱,如图6 所示.信号通过带通滤波器后会产生延时,延时的大小与滤波器设置的参数有关,通过将滤波后数据延时点删除可以消除滤波延时的影响.由于恢复的传感器光谱为同一传感器两个反射面与参考臂形成的干涉光谱间的拍频,两个信号的延时特性一致,因而对恢复信号的影响可以忽略.此外,由于系统中同一传感器的延时参数是统一的,即使带通滤波对系统响应光谱有微小影响也是可以忽略的.

图6 还原光谱与真实光谱对比((a)周期不匹配的情况;(b)周期匹配的情况)Fig.6 Comparison between the retrieved and real spectrum ((a)Mismatch phenomenon;(b)Match phenomenon)
虽然真实光谱和还原光谱具有近似的谱形,但是还原光谱的谷值处较为尖锐,因为在反傅里叶变换(Inverse FFT,IFFT)后对信号进行取模运算,导致信号没有负值部分,这会造成信号的失真.通过分析,发现信号在拍频时导致了频率的减半,具体原因可以由式(4)给出,可以看出两个信号在进行拍频之后会形成一个高频和低频信号的乘积,拍频后的低频信号频率为两个信号频率差的一半.因而可以通过倍频的方法将信号频率调整为一致,即对信号做一个平方,本方案中利用积化和差公式将拍频信号倍频,使得拍频信号与真实信号频率相同.
之后对系统中可以复用的传感器数量进行理论计算,第N个端面的反射强度为:
其中Pin表示输入到参考臂中的光,rm表示光纤反射端面的反射率,Pout是反射面反射到探测器的能量.rc1,N表示第N个耦合器第1 个端口的输出能量比,rc2,n表示第n个耦合器第2 个端口的输出能量比,平方表示光在耦合器中传播一个来回,αN表示第N个耦合器的插入损耗.假设本系统中采用99: 1 的耦合器将光分配给系统中的传感器,传感器法兰间的连接没有损耗,所有FPI 传感器端面都置于盐水(折射率近似为1.33)中,端面的反射率rm大概为0.0025,进入传感臂的光功率为10 mW,传感器中第500 个传感器的反射能量为2.2× 10-10mW,如果参考臂的输入光功率为20 μW,那么两束光相干后的光功率约为4.2 nW.这个光强度大于探测器的噪声等效功率,可以通过光电探测器探测得到.
本方案中采用的方案为相干探测方案,最大的传感长度需要综合考虑系统中光源的线宽、数据采集卡的采样率以及可调谐激光器的波长扫描速度;根据光源线宽和相干长度之间的关系: ∆v=c/(2nL),本方案中采用的可调谐激光器的线宽为60 kHz,光源的相干长度为1.66 km.按照本方案中设置的采样率(62.5 MHz)和波长扫描速度(80 nm/s),为了利用参考干涉仪光谱实现等频率重采样,参考干涉仪每个周期至少有5 个采样点,根据干涉光谱计算公式 ∆λ=λ2/(2nL),系统的最大传感距离为125 m.
3 实验系统搭建
为了对系统的特性进行测试,搭建了实验测试系统,为了实现高的距离分辨力,系统中采用的光频率扫描范围应该设置的尽可能大,本文采用的可调谐激光器是等波长间隔扫描的,然而干涉光谱在波长域并不是标准的正弦分布,根据干涉仪的干涉光谱公式y=cos(2π2nl/λ),波长位于正弦函数的分母上,虽然波长相对于腔长较小,得到的干涉光谱随波长是一个类正弦信号,但是这也会导致FFT分析结果不准确,尤其是在波长范围较大的情况下.为了消除激光器非线性扫频的影响,本方案中采用了附加干涉仪作为重采样的标准,利用干涉光谱在频域是标准三角函数的特点,三角函数在零点之间的间隔是确定的,通过利用参考干涉仪的零点实现光谱的等频率间隔重采样.
搭建了实验系统如图7 所示的带有附加干涉仪的传感系统.采用的光源为波长范围为1480 nm~1640 nm,品牌为Santec,型号为TSL770 的可调谐激光器,调谐速度为0~200 nm/s.系统中使用品牌为Conquer,型号为KG-PR-200 M 的光探测器,探测带宽为200 MHz,用于获取参考部分的干涉信号,所选的PD 的波长探测范围为850 nm~1650 nm.通过 Thorlabs 品牌的PDB570C 型号的BPD 将传感部分的参考臂与传感臂的干涉光进行相干探测.本方案中采用的BPD 工作波长范围可以覆盖1200 nm~1700 nm,探测带宽可以覆盖0~400 MHz.
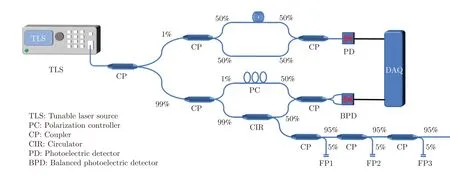
图7 实验搭建的FMCW 系统Fig.7 FMCW system configuration in experiment
选用Advantech 公司的PCIE-1840 采集卡(Data acquisition,DAQ)作为信号采集器件将探测器得到的信号读入电脑中,该采集卡可以实现4通道16 位分辨率的信号采集,每个通道的采样率可以达到125 MHz,在本实验中将采集卡的采样率设置为62.5 MHz,实验中可调谐激光器的波长范围为1530 nm~1570 nm,波长调谐速度为80 nm/s,数据每次采样时间为0.5 s.需要用到采集卡的三个通道,一个通道用作采集卡的触发信号,一个通道用于参考信号的采集,一个通道用于传感信号的采集.在利用参考干涉仪的光谱进行重采样时,将参考信号作为参考时钟,信号的等波数采样可以通过硬件法或者软件法实现.硬件法是通过将PD 探测得到的参考信号作为外部时钟信号输入到采集卡中.软件法则是将PD 探测到的参考采样信号和BPD 探测到的传感信号同时输入到采集卡的信号通道中.由于每次扫描产生的参考信号不能连续稳定存在,因而不能作为一个可靠的外部时钟.此外,采集卡对外部时钟的频率是有限制的,参考时钟的频率应该为10 MHz 左右才可以满足外部时钟采集需求.故采用了软件法对光谱进行重采样.
为了实现对系统光谱的处理与单个传感器的光谱恢复,基于LabView 开发环境编写了用于数据处理的软件,用于系统光谱的实时显示与处理.图8给出了数据处理软件的前面板,前面板包含多个用于设置采集系统的输入控件,主要包括可调谐激光器的起始扫描波长、终止波长、扫描速度的输入,采集卡的采样速率也可以通过输入控件进行设置,信号通道下拉菜单可以对信号的输入通道进行选择.此外,为了提高数据的读取效率,设置了用于调整采样段长与采样段数的输入控件.为了直观地显示光谱信息,图中右侧的4 个波形图分别用于显示原始采样光谱、重采样后的光谱、重采样光谱的频谱特性图以及还原后传感器的干涉光谱.理论上可以做到全部传感器光谱的显示,由于目前复用规模较小,为了清晰地显示单个光谱的变化情况,显示面板中只显示了单个传感器光谱的恢复,之后会考虑进行多个传感器光谱的同时处理,利用还原光谱显示控件作为带通滤波的参数选择参考,构建多个传感器光谱滤波参数数组,实现多个传感器光谱同时恢复.
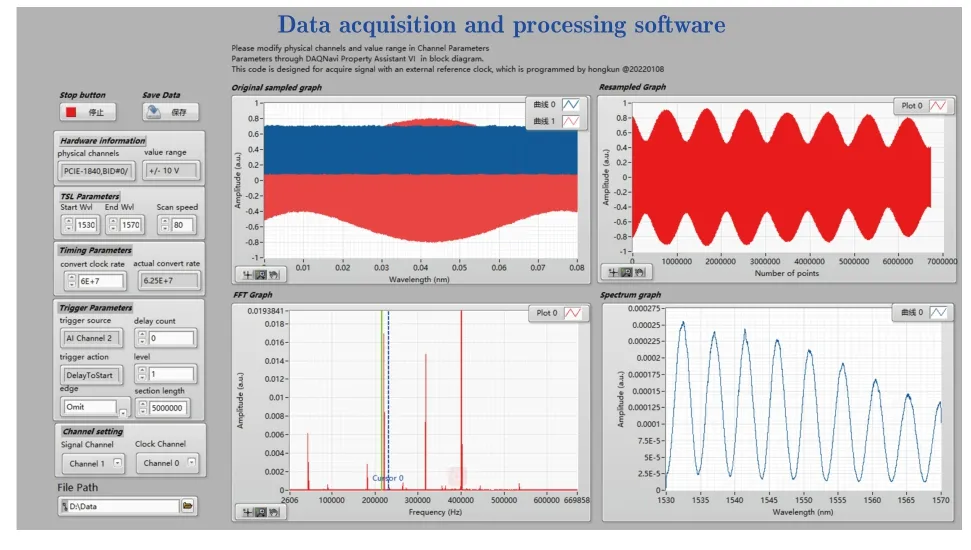
图8 数据采集处理软件前面板Fig.8 Front panel of the data processing software
图9 给出了数据采集处理软件的后面板,后面板中对数据的主要操作包括采集卡配置、信号重采样、FFT 频谱分析、IFFT 光谱还原以及光谱存储几个部分,这3 个过程都涉及到大量的数据操作,开始时采用了LabView 内置的VI 函数对光谱数据进行处理,由于光谱数据量较大,处理效率较低.之后改用LabView 内置的MATLAB 脚本VI 函数作为数据处理函数,大大地提高了数据处理速度.本实验中利用参考干涉仪作为参考时钟对传感光谱进行等频率重采样,为了方便信号采样,将时钟信号减去基值后通过比较器将波形从正弦波转换为方波,当方波两个相邻采样点出现正负跳变时,采集一个传感信号点,通过该种方法可以实现快速的传感光谱重采样.利用FFT 对重采样的信号进行频谱特征分析,之后通过矩形窗截取传感光谱的特征频谱,实现传感器光谱的恢复.

图9 数据处理软件后面板Fig.9 Back panel of the data processing software
4 实验验证
在所设计的大容量传感器复用系统中进行了应变和盐度实验.本文侧重于分布式干涉式光纤传感器的实现,因而选取了应变模拟压力的测量效果,海洋的压力通过增敏结构以应变的形式传递到光纤传感器结构上.在系统中接入了3 个传感器,传感器1 和传感器3 为常见的基于单模-空心-单模结构的光纤FPI 应变传感器,该传感器通过在单模光纤中间熔接一段空心光纤制作;传感器2 为利用单模光纤错位熔接制作的双FPI 级联的温盐传感器,该传感器的制作方法可以参考本课题组的论文[12].首先将传感器接入到FMCW 系统中,经过采集软件的重采样之后,得到的复合光谱如图10 所示.

图10 重采样后的复合传感光谱Fig.10 Composite sensing spectrum after resampling
之后用FFT 分析了复合光谱的频率特性,图11展示出了光谱的频谱特性,子图中给出了接入3 个传感器的频谱情况,对应整体频谱中蓝色椭圆圈出的部分.可以看出,由于本方案中采用的波长扫描范围较大,所以光谱的频率分辨力较高,可以区分同一传感器内的不同反射端面.图中紫色的特征峰值是由于光纤法兰连接处的反射造成的.可以明显地看出,传感器3 的光强远大于传感器1 和传感器2 的光强,这是为了能够区分传感器位置.传感器3接入的光为95%,传感器3 的反射光强度接近前两个传感器的20 倍,且3 个传感器是等间隔分布的,通过这种方法可以快速地找出系统中3 个传感器的特征频率.图中绿色的特征频率是由于传感器以及法兰之间的反射光拍频形成的.

图11 重采样光谱的频谱图Fig.11 Frequency spectrum of the resampled spectrum
图12 给出了传感器的应力测试系统,通过三维位移滑台用于固定光纤,铁架台用于悬挂光纤,将砝码悬挂在光纤自由端,用于给传感结构施加定量的应力.在弹性范围内,光纤的应力和所施加的质量之间存在线性对应关系.因为砝码的质量精度可以做到很高,本文采用砝码悬挂法对光纤实现精确的应变控制.
对传感器中传感器1 进行应力测试后,从数据处理软件上得到了不同应变下的光谱,对光谱数据进行了处理.对获取的干涉光谱进行平滑与寻峰操作,得到了不同质量下的干涉峰值,对不同质量下的干涉峰值进行拟合,得到的拟合结果如图13(a)所示,可以看出,随着所施加砝码质量的增加,干涉光谱的峰值波长表现出红移响应,传感器的灵敏度可以达到23.35 pm/g,拟合线性度可以达到0.997.图13(b)给出了传感器1 在同一质量下连续监测38 次的波长变化情况,测量标准差(Standard deviation,SD)可以达到40.85 pm,这可能是由于环境波动以及光源抖动等因素造成的.

图13 应力传感器响应特性((a)不同质量下谐振波长拟合效果;(b)固定质量下传感器波长监测)Fig.13 Responses of the strain sensor ((a)Wavelength fitting result under different weights;(b)Wavelength record under a fixed weight)
之后对双FPI 级联的温盐传感器的盐度(折射率)响应特性进行测试,将传感器2 放置于设计的盐度传感平台上.通过胶头滴管向传感平台一侧滴加盐水,通过吸水纸从另一侧吸收盐水,将待测浓度的盐水进行3 次冲刷用于减小浓度差的影响.本方案中采用吸水纸的原因在于盐水的表面张力相对于有机溶液较大,盐水无法可靠浸入传感结构(或者传感器的响应时间较长),影响测试结果的准确性.在实际应用中不需要更换液体,只需要保证待测液体浸入到传感器即可,可以考虑事先将传感器结构浸泡于有机溶液中.由于本传感器结构较小,浸泡需要的有机溶剂较少,对实际测量产生的影响可以忽略,测试环境由图14 给出.盐度测试采用的是海洋国家计量中心生产的中国系列标准海水.

图14 传感器盐度特性测试装置Fig.14 Salinity characteristic test device of the sensor
图15 给出了传感器的光谱情况,图15(a)表示传感器的原始光谱,这包含两个FPI 传感器的混叠光谱,通过带通滤波器将两个传感器的光谱进行恢复,对盐度敏感的传感器光谱在图15(b)中给出,对温度敏感的传感器光谱在图15(c)中给出.可以看出,使用带通滤波器可以很好地区分两个传感器光谱.

图15 传感器2 的光谱分解效果Fig.15 Spectrum decomposition of sensor2
本实验中仅对盐度响应特性进行测试,对不同盐度下的响应光谱进行了分析.分析结果在图16中给出,对光谱的特征峰值与盐水浓度进行了线性拟合,光谱随着盐度的增加表现出右移响应.传感器的盐度灵敏度可以达到242.58 pm/‰,拟合线性度可以达到0.9996,传感器的盐度和波长之间具有很好的响应特性.该传感器的盐度灵敏度与文献[17]基本是一致的,可以认为传感器的性能不受到复用系统影响.传感器随盐度变化的波长移动量达到9.7 nm,光谱移动量接近光谱周期的2 倍,采用光谱峰值追踪法无法进行有效的光谱处理.本次实验中,结合经验法对光谱进行寻峰,之后的实验可以考虑采用干涉光谱腔长解调技术对光谱进行解调[12],就可以实现大动态范围、高分辨力的光谱解调.

图16 传感器2 盐度响应特性拟合Fig.16 Salinity response characteristic fitting result of sensor 2
图17 给出了传感器在同一盐度下光谱特征峰值连续监测的效果,通过计算得到该传感器的波长标准差为20.68 pm,对应盐度的标准差为0.085‰.连续监测结果表明,传感器在该复用系统中仍然可以实现较好的传感效果.

图17 传感器2 盐度光谱的连续监测效果Fig.17 Continuous wavelength record of the salinity spectrum of sensor 2
5 结论
本文提出了一种基于FMCW 原理的干涉式光纤传感器的复用方法,利用传感器的反射端面和参考臂形成的Mach-Zehnder 干涉光谱之间的拍频实现传感器光谱还原,搭建了用于大容量传感器复用的实验系统,编写了用于数据采集与处理的软件,实现了数据的实时采集以及对系统内单个传感器光谱的还原,测试了系统中传感器的温度和盐度响应特性,实验结果表明,该复用系统在实现大容量传感器复用的同时不影响单个传感器的传感性能.所提出的复用方法可以用于基于光纤传感器阵列的海洋参数立体剖面监测以及多点温度监测等应用场合.