一种航天器交会与接近路径规划算法
2023-09-22许家忠
黄 成,王 涛,许家忠
(哈尔滨理工大学自动化学院,哈尔滨 150080)
0 引 言
空间交会与接近任务是指追踪星抵近飞行至另一个空间目标附近,并完成诸如绕飞、在轨操作、对接等操作的整个过程,根据目标星能否提供导航信息,可以将其分为合作与非合作两类。相比合作式情形,非合作目标的交会与接近在空间监测与服务、深空探测等领域具有更广阔的应用前景,但由于缺乏信息沟通,存在更大的挑战性。为了执行复杂多样的非合作目标近距离操作任务,航天器路径规划成为该研究领域的一项关键技术。目前约有1 900颗在轨航天器与15 000枚空间碎片存在于外太空[1],采用有效的航天器路径规划技术可以保证在不发生碰撞的情况下找到一条从当前位置到达目标位置的最优路径,同时满足消耗燃料最少、飞行时间最短等[2]要求。否则,航天器在飞行过程中可能发生碰撞事件或出现燃料不足等问题,导致操作任务不能正常进行。
目前路径规划方法大致分为两类,一类是以可视图法、单元分解法[3]、随机采样法[4]、人工势场法等为代表的传统算法,另一类则是以A*算法[5-6]、遗传算法[7-8]、粒子群算法[9]、蚁群算法等为代表的启发式算法。文献[10]为解决无人驾驶飞机在避障条件下的路径规划问题,提出了一种实时避碰算法,该算法所规划出的路径能够避免碰撞,并且能够保证最小安全距离。文献[11] 针对传统人工势场法存在局部极小值以及目标不可达的问题,提出一种增加逃逸力因数的人工势场法。文献[12]基于粒子群优化方法提出了大角度姿态机动时航天器在多种约束下的路径规划算法。文献[13]针对空间在轨操控机器人的路径规划问题,提出一种基于拓邻域搜索的蚁群算法,该算法可以有效地规划出机器人全局路径。然而,随着环境系统复杂性及任务难度的增加,传统算法难以取得理想的效果,而常规启发式算法也存在局部最优、收敛速度慢以及效率低等问题。
Yang[14]于2010年基于群体智能提出蝙蝠算法(Bat algorithm, BA),这是一种可以搜索全局最优解的启发式优化算法,与其他群智能优化算法相比结构相对简单、全局搜索能力较强、参数较少,因此更适用于解决要求运算速度更快、环境适应性更强、性能更优的路径规划问题。文献[15]提出一种在蝙蝠算法中融入黄金正弦算法解决移动机器人路径规划问题的方法,该方法具有较快的收敛能力以及全局搜索能力。文献[16]针对水下机器人避障的路径优化问题,通过线性渐变、高斯柯西变异以及界限随机重置机制等策略来改进蝙蝠算法,该方法使得水下机器人规划的路径更短、更平滑。文献[17]提出了一种基于改进蝙蝠算法的移动机器人路径规划方法,该方法平衡了算法的全局寻优与局部探索能力,提高了算法的收敛速度与寻优精度。蝙蝠算法也常用于求解连续型的优化问题,在调度问题[18]、函数优化[19]、故障诊断[20]、图像识别等方面有着广泛的应用。然而,标准蝙蝠算法存在易陷入局部极值、后期收敛速度慢等缺点,限制了其在复杂、快速收敛性任务中的实际应用,为了改善上述缺点,拓展其应用领域,需要对标准蝙蝠算法进行优化。
普遍情况下,研究者常采用传统直线或者圆弧分段插值的方法来解决路径规划的优化问题,但这些方法构造出来的移动路径会产生较多的转折点,因此能够导致路径曲线出现连续性以及平滑性较差的问题。而采用三次样条插值方法对目标路径进行优化,可以避免路径产生较多的转折点,从而拟合出一条连续且平滑的曲线。因此本文以文献[17]中的方法为理论基础,提出一种新的改进蝙蝠算法,进一步提高算法的寻优能力,并结合改进编码方式的三次样条插值算法对航天器路径进行三维规划。
综合考虑近程导引段任务特点及其对路径规划算法寻优性能的需求,本文将优化后的蝙蝠算法和三次样条插值方法相结合,提出一种收敛速度更快、路径更短的航天器路径规划方法。主要创新点为:1)引入Circle混沌映射进行种群初始化,有效地解决了初始解聚集等问题;2)位置更新时进行位置限定,同时在全局搜索阶段引入自适应随机动态扰动系数,在局部搜索阶段融入柯西分布的逆累积分布函数,实现了算法权重的动态变化,并增加了种群变异机制;3)融合分段随机的反向学习策略,调节了算法的搜索范围,进一步扩大了蝙蝠种群的多样性。
1 混合蝙蝠算法CPTDBA
1.1 相对运动参考坐标系定义
地心惯性坐标系OXYZ、轨道坐标系o1x1y1z1以及目标星本体坐标系o2x2y2z2之间的关系如图1所示。其中地心作为地心惯性坐标系的原点O,X轴在赤道平面内,并且指向春分点;Z轴沿着地球自转轴并指向北极;Y轴满足右手定则。轨道坐标系原点o1为参考星的质心,x1轴沿地心指向参考星质心;y1轴在参考星所在的轨道平面内,与x1轴相垂直,并且指向运动方向;z1轴通过右手定则进行确定。目标星本体坐标系原点o2为目标星的质心,3个正交惯性的目标星主轴分别为x2,y2,z2。
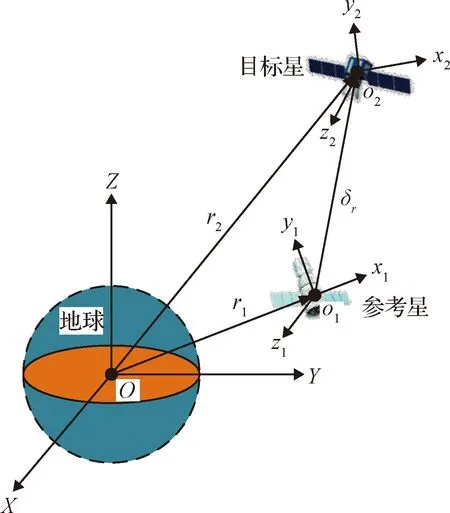
图1 坐标系定义Fig.1 Coordinate system definition
为了方便计算数据,本文以轨道坐标系作为航天器的相对运动参考坐标系。该坐标系中的参考星可以是真实的航天器,也可以是人为虚构出来的航天器,因此本文以路径规划开始时的航天器作为该坐标系的参考星。
1.2 蝙蝠算法数学建模
① 算法中的声波频率更新式为:
fi=fmin+(fmax-fmin)×β
(1)
② 速度更新式为:
(2)
③ 全局位置更新式为:
(3)

④ 局部搜索的位置更新式为:
Xnew=Xold+εAt
(4)
式中:Xnew为蝙蝠个体的新位置;Xold为当前蝙蝠个体的位置;ε∈[-1,1],且为一个随机数;At是当前蝙蝠种群所有个体的平均响度。
⑤ 声波响度更新式为:
(5)
⑥ 脉冲发射频率更新式为:
(6)

1.3 Circle混沌映射初始化种群
在标准蝙蝠算法与文献[17]提出的PTRBA算法中,初始蝙蝠种群的选取存在随机且分布相对不均匀的问题,因此容易产生全局搜索能力不强,收敛速度较慢[21]以及陷入局部最优解的问题。为了解决这一问题,提高算法的搜索能力,本文将Circle混沌映射算子引入到蝙蝠算法中。原Circle混沌映射的表达式为
(7)
式中:a=0.2,b=0.5,但这种Circle混沌映射值的分布依然不均匀,在[0.15,0.6]之间的取值较为集中,如图2(b)所示。因此本文对原Circle混沌映射进行改进,得到带有改进Circle混沌映射的种群初始化表达式:
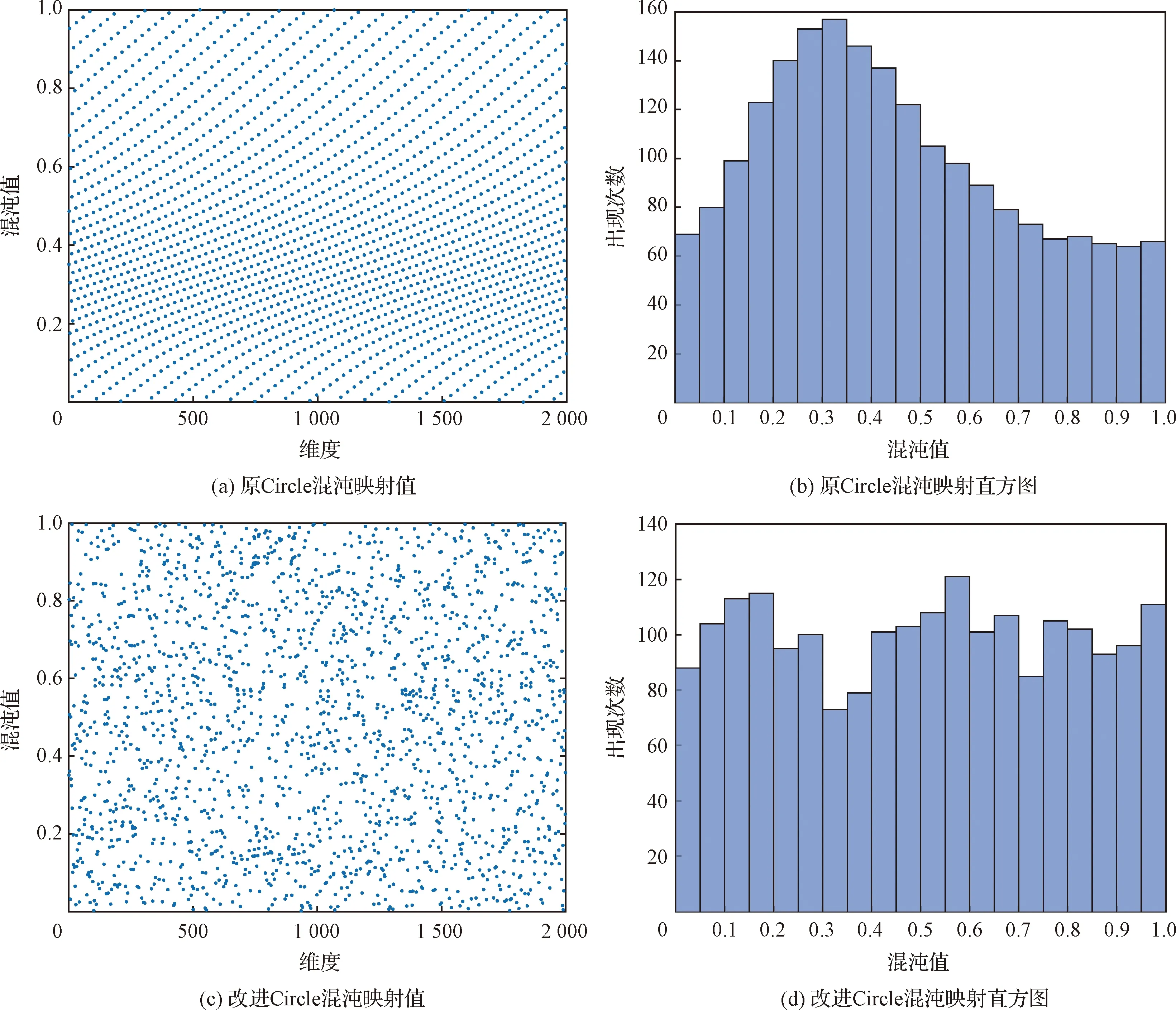
图2 Circle混沌映射值分布图Fig.2 Circle chaos map value distribution
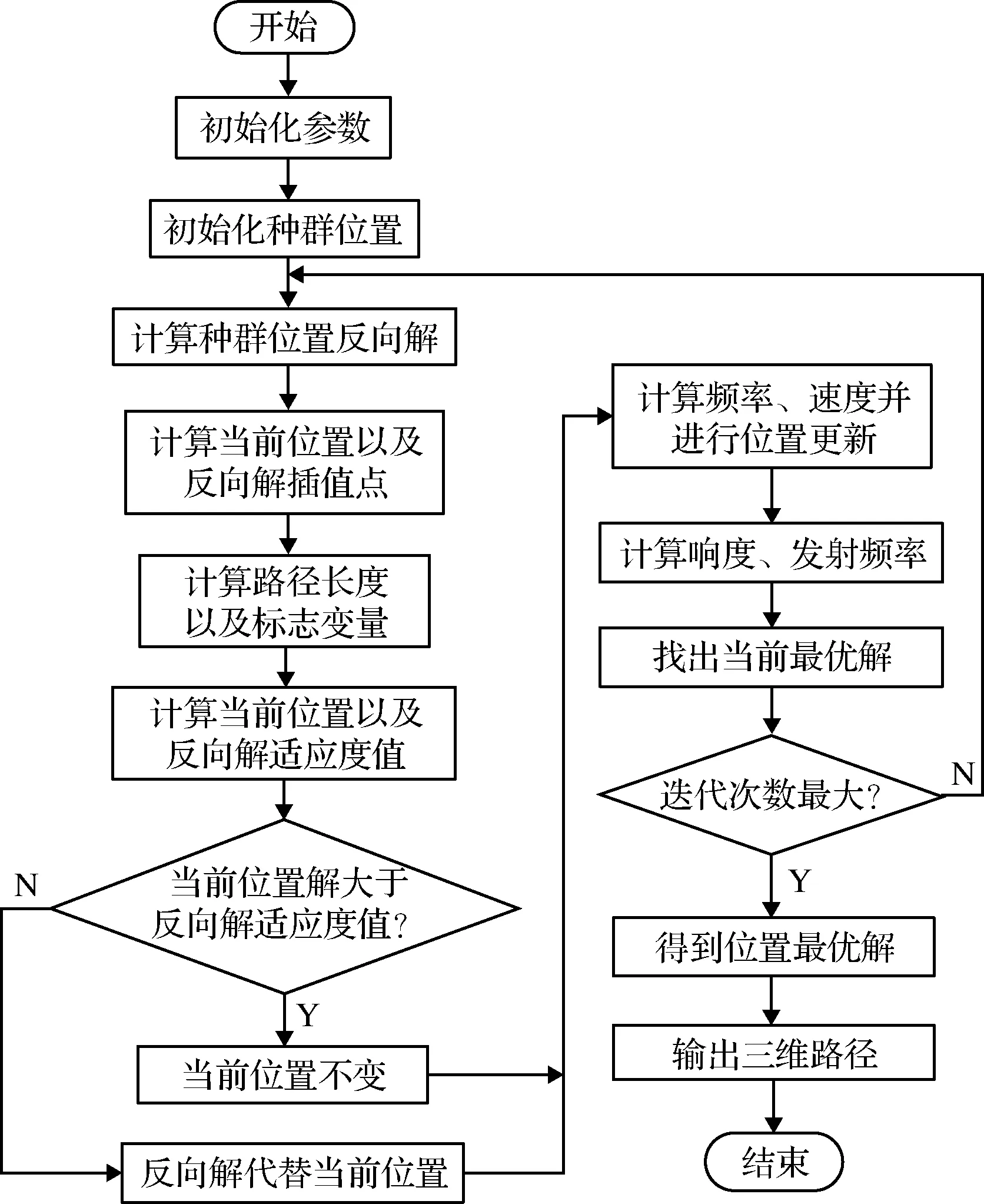
图3 CPTDBA算法流程图Fig.3 Flow chart of CPTDBA algorithm
(8)
式中:Xn代表第n只蝙蝠个体的初始位置,n=1,2,…,Npop-1,Npop为蝙蝠的种群数量。
由图2对比可知,(a)~(b)图中原Circle混沌值在[0.15,0.6]之间分布的较为集中,而(c)~(d)图中改进Circle混沌值分布的相对均匀,因此,引入改进Circle混沌映射对种群进行初始化有利于扩大蝙蝠种群的多样性,从而提高蝙蝠算法的寻优性能,避免算法过度早熟的问题。
1.4 自适应随机动态扰动系数
(9)
λ=W+ξ×B(b1,b2)
(10)
式中:t是当前蝙蝠种群的迭代次数;Tmax是蝙蝠种群的最大迭代次数;W为自适应权重策略协调收敛因子,能够平衡全局寻优和局部探索的能力,提高算法的搜索精度;ξ∈[0.1,0.5]上均匀分布的随机数;B(b1,b2)表示服从贝塔分布的随机数,本文中取b1=1,b2=2。加入服从贝塔分布的随机数后,蝙蝠算法有机会取得较大的权值,能够使得权重进行动态的变化,从而使蝙蝠算法的收敛速度得到提高。因此在全局位置更新式中引入自适应随机动态扰动系数,可以提高算法全局寻优的能力。全局位置更新式修改为
(11)
1.5 柯西分布的逆累积分布函数
标准蝙蝠算法在局部位置更新时,由于位置更新式(4):Xnew=Xold+εAt中的ε∈[-1,1]为随机数,因此蝙蝠种群在局部搜索时具有随机性,不容易寻找到局部最优解。本文采用柯西分布的逆累积分布函数对蝙蝠种群进行变异,利用柯西分布具有“尾巴”长的特点,扩大蝙蝠个体的变异范围。同时,当蝙蝠种群进行柯西逆累积分布函数变异时,蝙蝠个体将采用螺旋行走的方式进行局部寻优,因此能够避免蝙蝠种群进行盲目变异,从而提高局部搜索的能力。柯西逆累积分布函数式(12)所示,蝙蝠局部搜索的位置更新式修改为式(13)。
(12)
(13)
式中:Xnew为蝙蝠个体新位置;Xold为当前蝙蝠个体位置;当前蝙蝠种群所有个体的平均响度为At;κ∈[0,1]均匀分布的随机数,所以tan(π×(κ-1/2))具有正切随机探索的能力,可以使蝙蝠个体在当前局部最优解附近进行搜索,并且使得算法跳出局部最优,从而避免蝙蝠算法盲目搜索,使局部寻优探索机制更加准确。
1.6 分段随机反向学习策略
如果蝙蝠算法在解空间中陷入了局部最优,那么算法在后期进行寻优时精度就会降低,因此,本文提出一种分段随机的反向学习策略。文献[22]中定义了在n维空间中,点P(x1,x2,…,xn)的反向解为:
(14)
式中:xi∈[ai,bi],i=1,2,3,…,n。结合式(14),得到如式(15)、(16)所示的分段随机反向解:
(15)
(16)

2 三次样条插值函数
2.1 平面三次样条插值
设区间[a,b]内的n+1个点,把区间分为n个形如[(x0,x1),(x2,x3),…,(xn-1,xn)]的小区间,其中x0=a,xn=b。每个小区间内的曲线都是1个三次多项式,而三次样条插值函数S(x)满足以下条件:
1)S(x)=yi,i=0,1,2,…,n;
2)在每个小区间[xi,xi+1]内,S(x)=S(xi)都是1个三次方程;
3)S(x),S′(x),S″(x)连续。
三次样条插值函数在每段小区间内的形式可构造成如下形式:
Si(x)=aix3+bix2+cix+di,i=0,1,2,…,n-1
从Si(x)形式可以看出,每个小区间内有4个未知数(ai,bi,ci,di)。而区间[a,b]内共有n个小区间,所以整个三次样条插值函数(17)共有4n个待定系数。因此求解这些待定系数,就需要构造4n个方程。
S(x)=ax3+bx2+cx+d
(17)
首先,区间内所有的点xi均满足插值条件,即式(18),共n+1个方程。除端点外,其余n-1个点均满足式(19),共2(n-1)个方程,而加上两个端点分别满足第1个和第n个三次方程的条件,共2n个方程。其次,n-1个插值点的S(x)是一阶可导且连续的,即满足式(20),共n-1个方程。另外,S(x)也是二阶可导且连续的,即满足式(21),同样地,共n-1个方程。
S(xi)=yi,i=0,1,2,…,n
(18)
S-(xi)=S+(xi),i=1,2,…,n-1
(19)
S′-(xi)=S′+(xi),i=1,2,…,n-1
(20)
S″-(xi)=S″+(xi),i=1,2,…,n-1
(21)
此时共有4n-2个方程,再补充两个方程就可以得到S(x),这两个方程常用以下边界条件来补充:
1)自然边界:S″(x0)=S″(xn)=0,即指定端点二阶导数等于0;
2)固定边界:S′(x0)=A,S′(xn)=B,即指定端点一阶导数;
3)周期边界条件:端点处的函数值或导数值满足周期条件。
通过式(18)~(21)以及上述任意两个边界条件就可以求解出式(17)中的待定系数(ai,bi,ci,di),因此便能得到三次样条插值函数的表达式S(x)。
2.2 空间三次样条插值
由于本文求解的是航天器的三维路径,属于空间规划问题,需要进行空间的三次样条插值。根据投影法中,投影到两个平面上的两条曲线可以确定出唯一一条空间曲线的原理,本文采用投影法,将空间问题转化成平面问题进行解决。即利用投影法,结合求解平面三次样条插值的方法,计算形如式(22)的空间三次样条插值函数。
z=S(x,y)=a0+a1x+a2x2+a3x3+
b0+b1y+b2y2+b3y3
(22)
即把空间曲线S(x,y)投影到xoy平面和xoz平面上分别进行平面三次样条插值。本文根据式(17)构造出xoy平面和xoz平面上的三次样条插值函数式(23)、(24),并分别求解出对应的平面三次样条插值函数y与z。
y=a1x3+b1x2+c1x+d1
(23)
z=a2x3+b2x2+c2x+d2
(24)
将式(22)~(24)联立求解,就能得到空间三次样条插值函数S(x,y),然后通过结合混合蝙蝠算法就能够规划出航天器的三维路径曲线。
3 航天器三维路径规划
3.1 粒子编码设计
在三次样条插值中,每个大区间[aj,bj]之间的连接处可称为路径节点,而每个小区间[xi,xi+1]之间的连接处则称为插值点。路径节点就相当于整条路径上最大的转向次数,通常情况下,3~5次转向就可以避开所有障碍物到达目标位置。粒子的编码就是路径节点的坐标位置,可以根据当前的环境进行选择。本文提出一种基于升序排列的路径节点进行三次样条插值编码设计的方法。
假设通过蝙蝠算法得到j个坐标为(x1,y1,z1),…,(xj,yj,zj)的路径节点,并且xj,yj,zj均进行对应的升序排列。已知路径起点与终点的坐标分别为(x0,y0,z0)、(xm,ym,zm),通过三次样条插值,在区间[x0,x1,…,xj,xm]、[y0,y1,…,yj,ym]以及[z0,z1,…,zj,zm]上分别构造n个插值点,就可以得到n个形如(X1,Y1,Z1),…,(Xn,Yn,Zn)的三维插值点坐标,将起点、插值点、路径节点以及终点进行连线,便可以得到航天器最优的三维路径。通过将路径节点进行升序排列,避免了连线过程中曲线弯曲交织、弯曲程度较大等问题,减少了不必要路径的产生,从而提高了算法的运行效率。
紧紧围绕党的号召和党建工作加强文化建设。积极贯彻落实党中央和部党组总体部署,深入开展党的群众路线教育实践活动,制定出台了《水利部综合事业局贯彻中央八项规定实施细则》《水利部综合事业局工作规则》等多项重要制度。深入基层开展调查研究,设立局长接待日,从数百条群众建议和意见中,梳理出共计6大方面的59条急需解决的重要事项,并利用局党委会、局长办公会、专题办公会、工作例会以及专项协调会等一系列会议,逐项消化解决突出重点、难点、热点问题,切实答复广大职工的关切,密切全局职工干群关系,为全局稳定健康发展提供思想保障和政治保障。
3.2 适应度函数构建
航天器在规划三维路径时需要满足以下条件:
1)能够躲避障碍物,并且不能产生碰撞;
2)航天器消耗的燃料最少、飞行时间最短,即规划的三维路径最短。
本文就上述两个条件进行适应度函数的构建。适应度函数表达式如下:
F=L(1+ω×η)
(25)
式中:L为将起点、插值点、路径节点以及终点进行连线的曲线长度,计算式为(26)。ω为避障系数,选取合适的值可以剔除穿越障碍物的路径,本文通过实验对比,决定取ω=1 000。η为标志变量,初始值为0,计算结果与障碍物相关。
L=
(26)
式中:(Xi,Yi,Zi)为第i个插值点的坐标。为了方便计算适应度函数,本文将障碍物设置成圆形,个数为N,因此η的计算形式可如下所示:
η=η+Average(θk)
(27)
(28)
(29)
式中:k=1,2,…,N,i=1,2,…,n;dki为当前路径上第i个插值点与第k个障碍圆心的距离,而dk则表示n个dki组成的集合,(Xrk,Yrk,Zrk)为第k个障碍的圆心坐标;θk为标志变量数值集合;rk为第k个圆形障碍的半径。当路径穿过第k个障碍物时,θki>0,反之,θki=0;若整条路经均未穿过第k个圆形障碍,则集合θk内的数θki均为0。η为累加值,当整条路经均未穿过障碍时,η=0,否则,η>0。
3.3 CPTDBA算法实现步骤
步骤 1.初始化种群规模Npop、声波频率最大值fmax和最小值fmin、速度Vi、声波响度Ai、脉冲发射频率ri以及迭代总次数Tmax。确定路径起始点(x0,y0,z0)和终止点(xm,ym,zm),设定圆形障碍物个数N、圆心(Xr,Yr,Zr)以及半径r,并根据当前航天器所处环境中障碍物的个数确定路径节点个数j以及插值点个数n。
步骤 3.根据蝙蝠所在位置,参考分段随机反向学习计算式(15)、(16),求出对应的反向解。
步骤 4.将上述求得的xj,yj,zj坐标分别进行升序排列,根据式(22)计算出空间三次样条插值函数S(x,y),并利用S(x,y)求出n个插值点的坐标(X1,Y1,Z1),…,(Xn,Yn,Zn)。
步骤5.利用式(26)求出路径长度L,并利用式(27)~(29)计算出标志变量η的值,从而判断路径是否穿过圆形障碍。
步骤 6.利用式(25)计算出适应度函数的值以及步骤3中反向解的适应度值。
步骤7.比较当前蝙蝠个体位置与其对应反向解的适应度值大小,若前者大于后者,则用反向解代替当前蝙蝠个体的位置。
步骤 8.利用式(1)、(2)、(11)、(13)进行蝙蝠个体频率fi、速度Vi以及位置Xi的更新,并对更新后的Xi进行位置限定,将其固定在[Xmin,Xmax]范围内;并利用式(5)、(6)进行蝙蝠个体响度Ai、脉冲发射频率ri的更新。
步骤 9.排列适应度值,找出位置最优解。
步骤10.在迭代次数Tmax内循环执行步骤3~8。
步骤11.输出航天器最短的三维路径。
4 实验仿真
为了保证某些参数设置的合理性,保证后续实验的正常进行,本文通过三种对比试验,确定了标志变量ω的取值、限定位置[Xmin,Xmax]的范围以及路径节点升序排列的可行性。同时,为保证提出的CPTDBA算法在求解航天器三维路径问题上的有效性和准确性,本文将CPTDBA算法与文献[17]中提出的具有反向学习和正切随机探索的蝙蝠算法PTRBA、标准蝙蝠算法BA以及标准粒子群算法PSO,在简单和复杂两种环境下进行对比实验。
4.1 实验环境及参数设置
为了减少其他因素对本文实验的干扰,CPT-DBA、PTRBA、BA、PSO 4种算法均在Python 3.9软件平台进行仿真运行。本文分别在简单环境与复杂环境中对航天器三维路径进行对比实验,其中部分参数值的设置保持一致,如4种算法的种群数量Npop=150,迭代总次数Tmax=100,3种蝙蝠算法的声波频率最大值fmax=5 kHz、最小值fmin=0 kHz,声波响度Ai=0.5 dB,脉冲发射频率ri=0.25 kHz,响度衰减系数α=0.3,脉冲发射频率增强系数γ=1。
为了确定对航天器三维路径规划影响较大的参数,即确定标志变量ω的取值、限定位置[Xmin,Xmax]的范围以及路径节点升序排列的可行性,提高算法寻优能力,找到符合条件的最短路径,本文分别对其进行了相应的对比实验。而为了使对比结果更具有代表性以及说服力,本文将在复杂环境下以CPTDBA算法为例进行实验,实验结合路径曲折程度、种群收敛速度以及运行30次后路径平均解、最短路径解、最长路径解等因素进行综合分析,从而确定出相关参数的取值。
1)标志变量ω
令ω=10,ω=100,ω=1 000,这3种取值都能规划出航天器最短路径,且路径长度差距不大,但ω=1 000时路径不存在碰撞,路径曲折程度最小,收敛速度最快,最优解和陷入局部最优的次数也最小。因此,本文设定ω=1 000。
2)限定位置[Xmin,Xmax]
分[1, 7], [0.5, 7.5], [0.1, 7.9]3种情况进行对比,其中3种位置限定均能规划出无碰撞的航天器三维路径,但[0.1, 7.9]迭代速度较快,陷入局部最优的次数较少,最优解分布较为均匀,路径曲折程度、路径平均解以及最短路径解也均优于其他两种情况。因此,本文设置限定位置的范围为[0.1,7.9]。
3)路径节点升序排列的可行性
分为路径节点排序和路径节点未排序两种路径情况,其中两种路径情况都能规划出符合条件的航天器三维路径,但路径节点排序时的路径曲折程度小,迭代速度快,且路径平均解、最短路径解以及最长路径解都要优于未排序时的结果。因此,本文对插值的路径节点进行升序排列。
4.2 单目标系统下的三维路径规划
单目标系统分别在简单环境和复杂环境两种情况下,对4种算法进行三维路径规划的对比实验,设定路径起始点为(0, 0, 0),终止点为(8, 8, 8)。在简单环境下设置空间障碍物个数N=6,路径节点个数j=3,在复杂环境下设置空间障碍物个数N=11,路径节点个数j=4,且两种情况下三次样条插值点个数n均为100。由上述确定参数的对比实验可知,标志变量ω=1 000,限定范围为[0.1, 7.9],且路径节点进行升序排列。两种路情况下的对比实验结果如图4及表1所示。
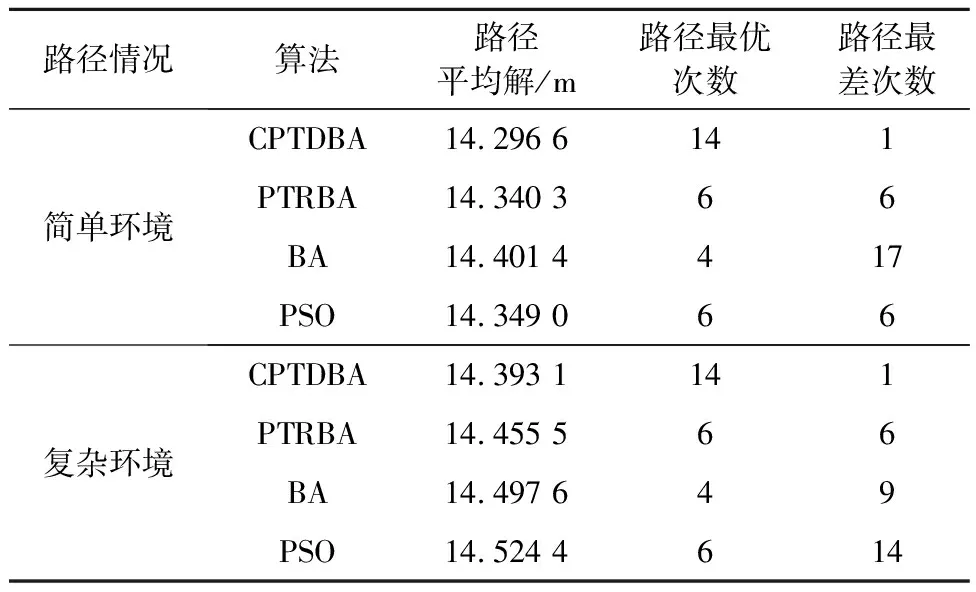
表1 两种路径情况下4种算法的最优路径情况对比Table 1 Comparison of optimal path conditions of four algorithms under two path conditions
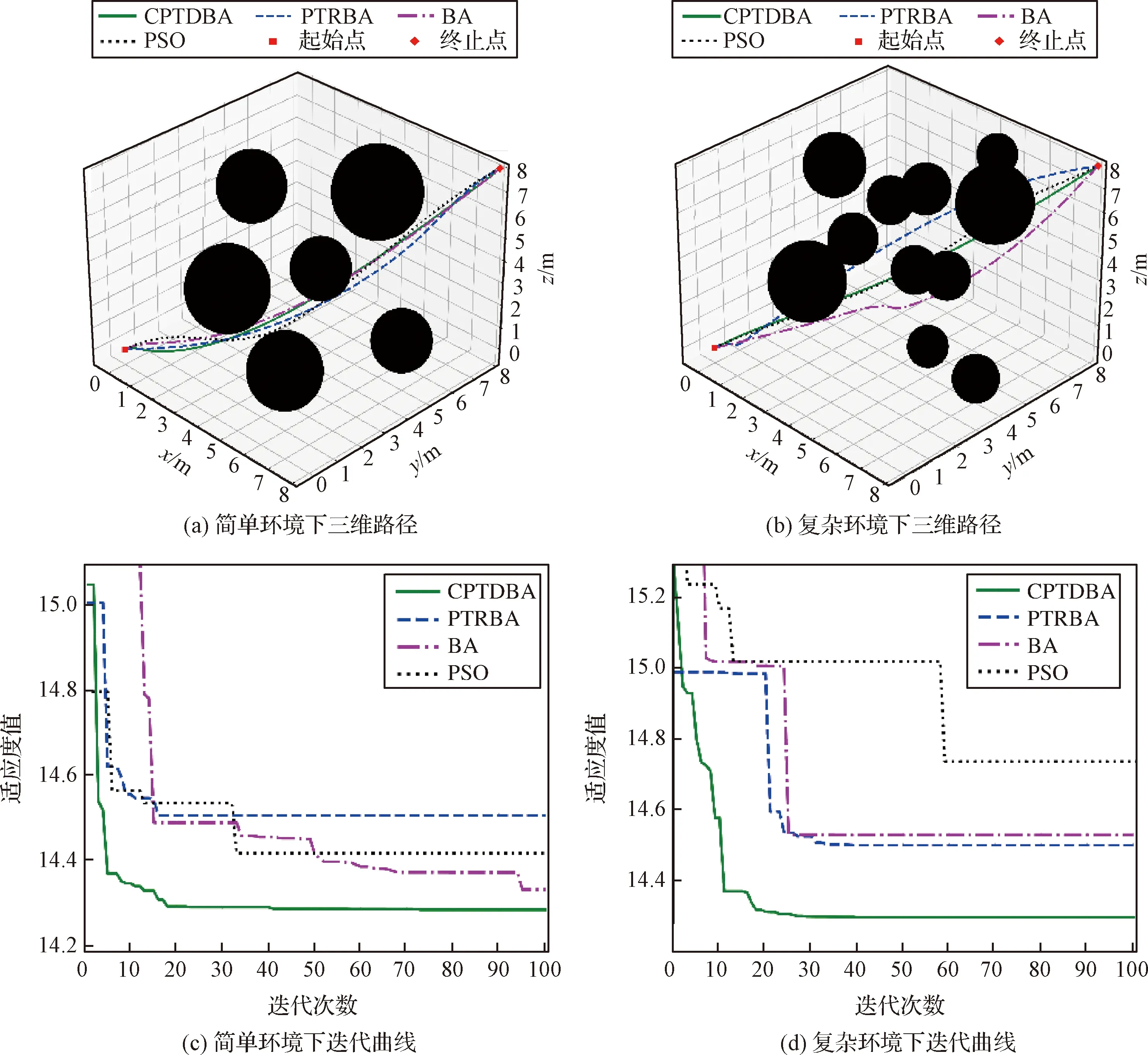
图4 两种路径情况下4种算法的路径对比图Fig.4 Path comparison of four algorithms under two path conditions
由图4(a)~(b)可知,4种算法在两种路径情况下都能够规划出航天器最短三维路径,但CPTDBA算法规划出的路径曲线更为光滑,路径的曲折程度相对较小,特别是在复杂环境下该结果尤为明显。
从图4(c)~(d)中可以明显的看出,在两种环境下,本文提出的混合蝙蝠算法CPTDBA收敛速度均要优于另外3种算法,并且最优解也均小于另外3种算法,这是因为在全局搜索阶段加入的自适应随机动态扰动系数可以使算法的权重发生动态变化,从而提高算法收敛速度以及寻优能力。在图4(c)~(d)中也可以看出CPTDBA算法能够快速逼近最优解,并且陷入局部最优解的时间较短,能够快速跳出局部最优,这是因为在局部搜索阶段引入的柯西分布的逆累积分布函数避免了算法盲目搜索,从而提高了局部搜索能力,使得算法能够及时跳出局部最优。
在两种路径情况下,每种算法独立运行30次后,CPTDBA算法的最优解分布较为均匀,在简单和复杂两种环境下的变动范围分别为(0, 0.15)与(0, 0.35),而另外3种算法的最优解分布变动范围较大,最小变动范围也在(0, 0.5)之间,在复杂环境下该结果更加明显。这是因为CPTDBA算法利用Circle混沌映射的方法对种群进行了初始化,避免了初始种群分布不均匀的问题,扩大了初始种群的多样性,使得算法较为稳定,进一步提高了算法的寻优性能。
如表1所示,每种算法独立运行30次后,两种路径情况下CPTDBA算法的路径平均解分别为14.296 6 m、14.393 1 m,要小于另外3种算法,并且路径最优(最优解小于其他算法)次数以及路径最差(最优解大于其他算法)次数均要优于另外3种算法。这是因为采用的随机分段的反向学习策略进一步扩大了种群的多样性,提高了寻优精度与收敛速度,并且平衡了全局寻优与局部探索的能力,因此能够让算法更加稳定。
4.3 多目标系统下的三维路径规划
多目标系统的三维路径在规划时不仅要求航天器不能与空间障碍物发生碰撞,并且航天器与航天器之间也不能发生碰撞。针对上述要求,本文基于虚拟障碍物[23]思想,提出一种以插值点构造虚拟障碍物进行航天器多目标三维路径规划的方法,该方法具体流程如下:
步骤1.首先利用上述算法规划出第1个航天器的三维路径,然后利用第1条路径的插值点,从第1个插值点开始,以m个插值点之间的距离为直径,并以m个插值点间的中心坐标为圆心,人工虚拟出第1个空间圆形障碍,其余n-m个插值点以此类推,可虚拟出M个障碍。
步骤2.此时环境中共有N+M个障碍,在此环境下再规划出第2个航天器的三维路径。由于第1个航天器路径已经人工虚拟成障碍物,所以规划出的第2条路径不会发生碰撞。
步骤3.基于上述思想,以此类推,规划出多目标系统中所有航天器的三维路径。
多目标系统同样也是在简单和复杂两种环境下对4种算法进行对比实验,不同的是多目标系统在两种环境下又根据起止点的异同分为四种情况,因此每种算法都有8种运算环境。同理,算法中标志变量为ω=1 000,限定范围为[0.1, 7.9],路径节点进行升序排列。在简单环境下设置空间障碍物个数N=4,在复杂环境下设置空间障碍物个数N=9,其余参数与单目标系统相同。本文只给出复杂环境情况下的实验结果图,简单环境情况下只给出表格结果。4种算法的实验结果如下所示:
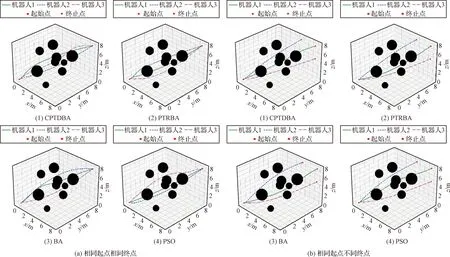
从图5中可以看出,4种算法都能够根据要求规划出相应的三维路径,并且多目标之间未发生碰撞,路径较为光滑,未出现过多曲折,这是因为碰撞参数以及位置限定范围取值较为合理,并且路径节点进行了升序排列,降低了路径发生弯曲折叠的可能性。而本文改进的CPTDBA算法规划出的路径在躲避空间障碍物的同时,更靠近不考虑碰撞而直接连接起点和终点的最优直线,路径更加平滑,路径整体弯曲程度小于其他3种算法,即使因躲避障碍物而引起的路径弯曲程度也要比其他算法小。CPTDBA算法规划出的30次路径最优解与其他3种算法对比来说变动范围相对较小,分布也相对均匀,这是因为初始化阶段的Circle混沌映射、全局搜索阶段的自适应动态扰动系数以及局部探索阶段的柯西分布的逆累积分布函数使得算法种群具有多样性,让算法能够快速向最优目标靠近,并且能够提高算法整体寻优性能以及稳定性。
表2、表3是每种算法在不同路径情况下独立运行30次的最优路径情况,从表中可以看出,本文提出的混合蝙蝠算法除了因随机参数变动过大导致少数机器人最优解偏大以外,大部分的机器人平均解、总路径平均解、总路径解最优(最优解小于其他算法)次数以及总路径解最差(最优解大于其他算法)次数均要优于另外3种算法,这是因为采用Circle混沌映射初始化种群以及引入随机分段反向学习方法,提高了种群的多样性,平衡了算法全局寻优以及局部探索的能力,更有力的证明了本文提出的混合蝙蝠算法与三次样条插值结合的航天器三维路径规划方法的可靠性。
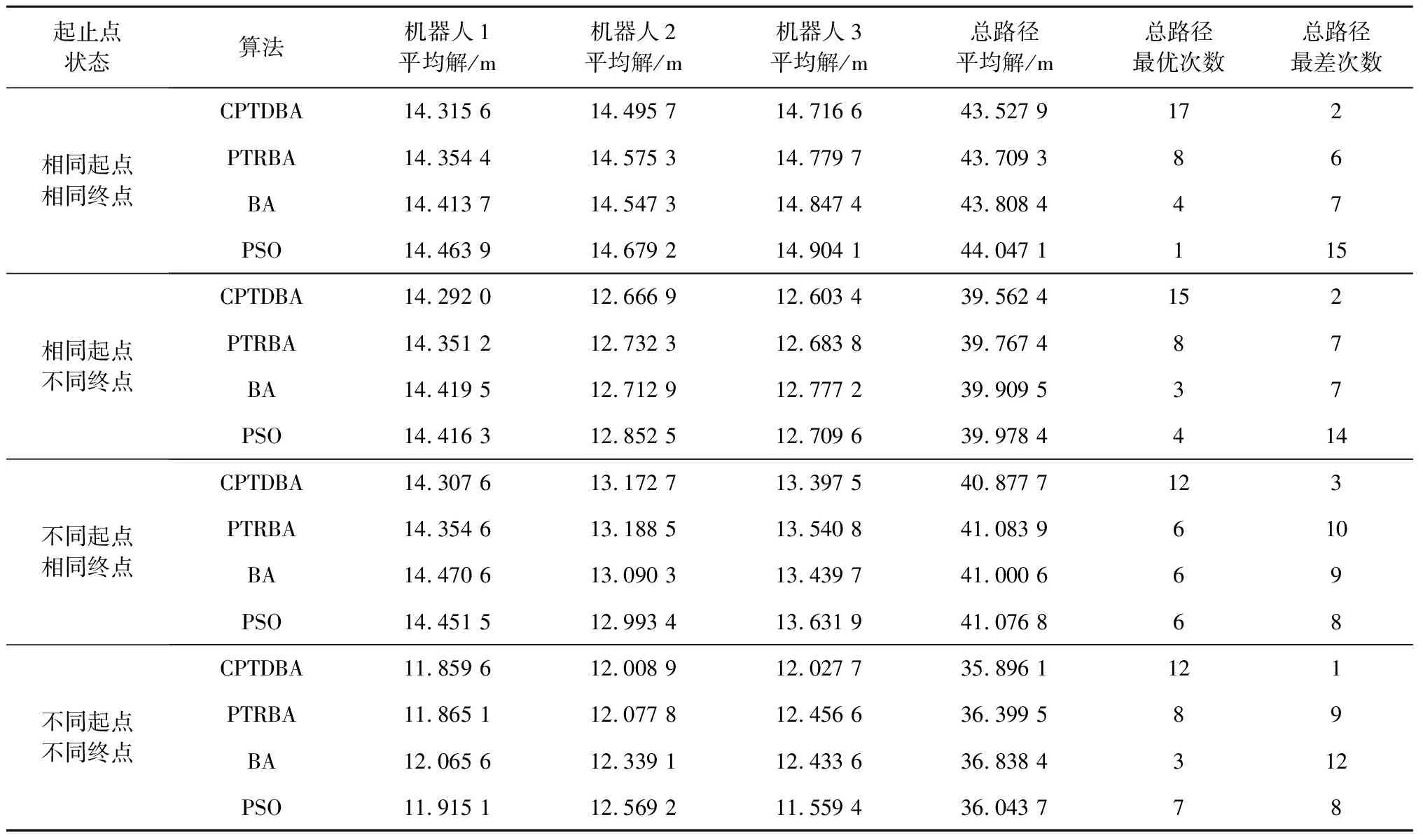
表2 复杂路径下4种算法的最优路径情况对比Table 2 Comparison of optimal path conditions of the four algorithms under complex paths
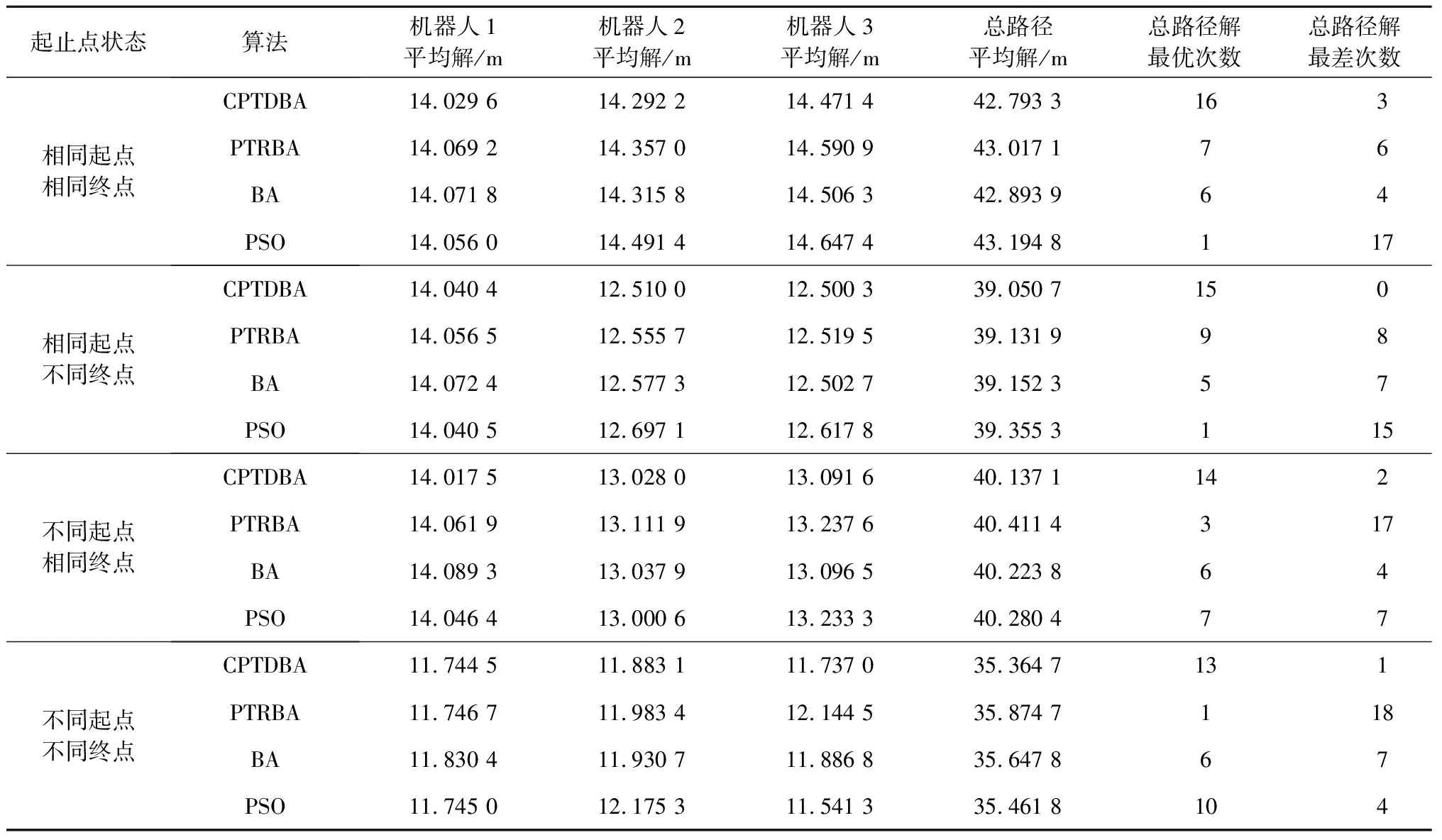
表3 简单路径下4种算法的最优路径情况对比Table 3 Comparison of optimal path conditions of the four algorithms under simple paths
5 结 论
本文将混合蝙蝠算法与三次样条插值结合研究了非合作交会与接近任务中近程导引段三维路径最优规划问题,研究成果及结论总结如下:
1)混合蝙蝠算法能够增强蝙蝠种群的多样性,可以使算法更容易跳出局部最优,能够平衡算法全局寻优与局部探索的能力,并且可以让算法收敛速度更快,结果更加稳定;三次样条插值算法能够让规划出来的航天器三维路径曲线更加光滑。
2)仿真结果表明,所提出的三维路径规划方法能够在同等约束情况下使得航天器飞行路径更短,从而保证航天器消耗的燃料变少,能够解决近程导引段航天器三维路径最优规划问题,提高了非合作交会与接近任务的安全性和自主性。