新型主-被动悬架式星球车垂直越障性能分析
2023-09-22户三峰陶建国
户三峰,陶建国
(哈尔滨工业大学机器人技术与系统国家重点实验室,哈尔滨 150080)
0 引 言
随着行星探测技术的不断发展及星表探测任务的逐渐深入,星球车将面临诸多大范围、超远距离移动探测任务场景,如月面极地区域资源探测、广域采样返回及月球基地选址可行性勘探等[1-2],这对星球车的越障能力提出了更高的要求。
星球车的障碍通过性是其移动性能的重要指标,通常以其克服垂直台阶、凹坑、壕沟等几何障碍的能力来衡量[3],其中垂直越障能力是体现障碍通过性重要的指标之一。星球车移动系统的悬架构型对提高星球车的障碍通过性具有重要作用,因而成为星球车研究的主要热点之一。摇臂-转向架式(RB)悬架是被动式悬架的典型代表,该类悬架由于结构简单、能耗小、控制简单[4],能被动适应地形变化,在星球车中得到广泛的应用,例如中国的月球车[5-6]和美国的火星车[7-10]均采用RB悬架。侯绪研等[11]基于准静力学模型,讨论了通过结构参数优化提高RB悬架星球车越障性能的有效性。另外,可视为RB悬架变体的RCL-E移动系统采用的侧置摇臂悬架[12]和CRAB移动系统采用的双平行四边形摇臂悬架[13],同样展现了良好的垂直越障能力。
摩擦系数需求是评价悬架越障性能最常用的衡量指标,其定义为星球车在没有发生滑转的情况下爬上等轮径高度台阶所需的最小摩擦系数[14]。摩擦系数需求的值越小,星球车越障失败的可能性就越小,也即星球车的越障性能越好。Thueer等[15]以摩擦系数需求作为衡量指标分别对RB和CRAB、RCL-E等星球车悬架的越障性能进行了评价和比较。Noble等[16]以摩擦系数需求为目标函数对RB悬架的结构参数进行优化,优化后的摩擦系数需求相较于优化前可降低13%。
随着行星探测任务越来越复杂,兼具轮式高效行走和腿式高通过性的主-被动悬架成为未来的研究方向。目前,主-被动悬架式移动系统最具代表性的有:法国皮埃尔和玛丽居里大学的Hylos[17],ESA的ExoMars[18],中国的“祝融号”[19-20]和俄罗斯的Marsokhod[21]。主-被动悬架相较于被动悬架的优势在于能够通过悬架的主动变形来降低越障所需摩擦系数。Jarrault等[22]针对Hylos-II越障提出一种姿态优化控制方法,通过悬架的主动变形,其越障摩擦系数需求从0.9以上降低至0.8。Patel等[18]在ExoMars爬越垂直障碍试验中发现,标称状态下的ExoMars需要地面为其提供的摩擦系数为0.8时才能越过150 mm高的障碍(车轮直径250 mm),而通过调整悬架结构,ExoMars的摩擦系数需求降低至0.65。“祝融号”是在RB的基础上所提出的一种主动式悬架[19],其普通步态越障的摩擦系数需求与RB的一致,而主动越障的摩擦系数需求对比普通步态略有提高。Marsokhod悬架是由三节串联铰接组成的主动悬架,其能够通过悬架的主动变形和俯仰关节的额外转矩来提升越障能力,文献[23]通过求解星球车越障准静力学平衡方程和仿真,获得了其被动和主动越障模式的摩擦系数需求分别为0.9和0.6。
综合上述研究,针对现有被动和主-被动悬架式星球车的越障摩擦系数需求较大的问题,本文在Marsokhod悬架基础上设计了一种摩擦系数需求更小、越障能力更强的新型主-被动悬架式星球车,以摩擦系数需求作为越障性能的评价指标,对所提出的新型主-被动悬架的垂直越障能力进行了分析,并与其它几种典型悬架的越障性能进行了对比讨论。
1 新型主-被动悬架式星球车移动系统构型
本文提出的星球车移动系统新构型由一体式车厢、主-被动悬架和三对独立驱动的圆柱-圆锥车轮组成,如图1所示。该移动系统的主-被动悬架由前、后对称的六自由度串联铰接结构和双差动平衡支撑机构(Differential balance support mechanism, DBSM)组成,能够实现前、中、后轮之间的相对俯仰、侧向扭转和纵向摆动运动。俯仰关节在DBSM约束下始终保持一致的对称转角,并通过由驱动电机、离合器及蜗轮传动等组成的角度调节器实现主/被动回转的切换;侧向扭转关节设置有离合器,为可锁定的被动回转关节;前、后摆动关节为可制动的主动回转关节,可根据需要通过电机驱动调节关节角度,并能够实现展开-收拢动作。DBSM是一个由支撑杆、平衡杆和连接杆通过球铰链接而成的空间机构,与车厢、俯仰臂杆及角度调节器铰接,其结构及工作原理见文献[24]。

图1 新型主-被动悬架式星球车示意图Fig.1 Figure of rover with a novel active-passive suspension
星球车的车轮由圆柱和圆锥两部分组成,如图2所示。在松软地形中行驶时,车轮的圆柱和圆锥部分同时接触地面,可降低滚动阻力,从而提高车轮的牵引性能。由于锥形部分缩短了轮轴的外露部分,大大降低了轮轴被地面障碍物卡住的可能性。
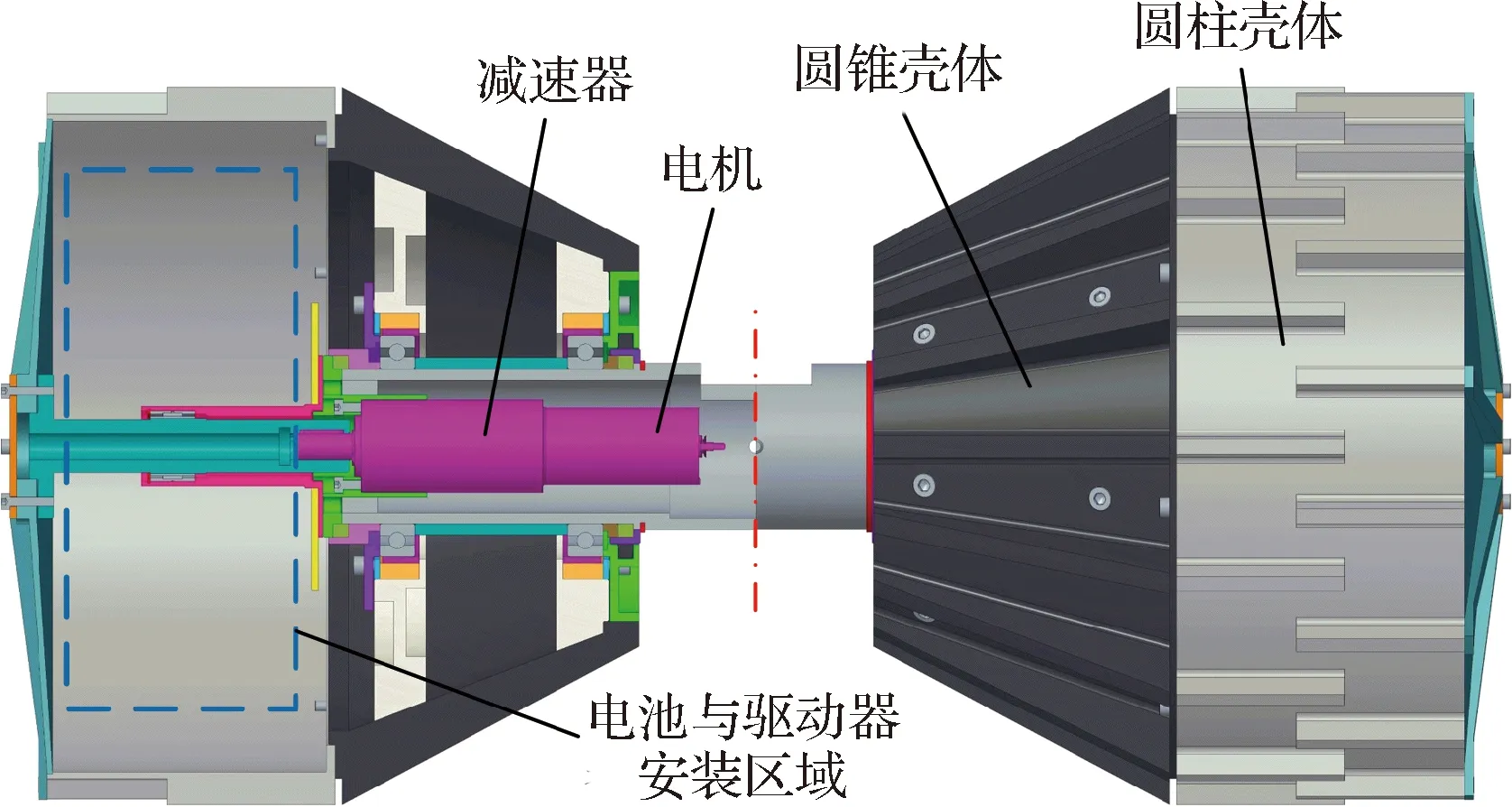
图2 星球车车轮结构Fig.2 Wheel structure of the rover
2 新型主-被动悬架式星球车越障策略
新型主-被动悬架式星球车具有被动式、半主动式和主动式三种越障模式。其中,被动越障模式指在整个越障过程中俯仰关节和侧倾关节为自由关节以及摆动关节角度始终保持不变,悬架随障碍被动地产生相对俯仰和扭转运动;半主动越障模式中除了悬架的摆动关节需要在前、中、后轮越障前进行相应调节外,其余关节状态均与被动越障模式一致;主动越障模式中不仅需要根据越障的不同阶段调节摆动关节和锁定/释放侧倾关节,还需要角度调节器的电机在车轮爬升过程中在俯仰关节处提供辅助力矩。由于垂直障碍最能反映星球车的越障性能,因此下面将对本文设计的星球车移动系统半主动和主动爬越垂直障碍模式的运动策略进行介绍。
2.1 半主动越障模式
2.2 主动越障模式
越障前星球车为标称状态;当前轮行驶到障碍前一定的距离时,为保证后面前轮越障过程中的车体平衡,先将后摆动关节向后展开至极限位置(45°);在前轮爬升的过程中,前、后侧倾关节分别处于锁定和释放状态,角度调节器中的离合器锁定并提供顺时针方向(俯视视角)的驱动力矩,如图4(a)所示;在中轮爬越障碍的过程中,前、后侧倾关节均处于锁定状态,角度调节器中的离合器锁定并提供逆时针方向(俯视视角)的驱动力矩,如图4(b)所示;当中轮爬上障碍时,角度调节器停止驱动并释放离合器,并将前摆动关节展开至极限位置(45°)和后摆动关节收拢至初始位置;在后轮翻越障碍的过程中,前、后侧倾关节分别处于释放和锁定状态,角度调节器的离合器锁定并提供顺时针方向(俯视视角)的驱动力矩,如图4(c)所示;最后,在后轮爬上障碍后,前摆动关节收拢至初始位置。

图4 主动爬越障碍Fig.4 Climbing step obstacle in active mode
主动越障模式和半主动越障模式的主要区别有:(1)各轮越障前的摆动关节的角度调节要求不同,主动越障要求前、后摆动关节的角度调节为指定的角度,半主动越障则不需要;(2)越障过程中悬架关节的状态不同,主动越障中的俯仰和侧倾关节需要根据情况进行锁定/释放状态的切换,而半主动越障的俯仰和侧倾关节全程处于被动状态;(3)主动越障的角度调节器会提供主动回转力矩来辅助星球车越障,半主动越障则没有。
3 新型主-被动悬架运动学和准静力学分析
目前星球车的行驶速度比较低(200 m/h),惯性可忽略不计,因此本文仅考虑各构件重量和车轮相对俯仰关节的作用力矩,并侧重星球车垂直越障过程中的运动学和准静力学研究。
3.1 新型主-被动悬架运动学建模

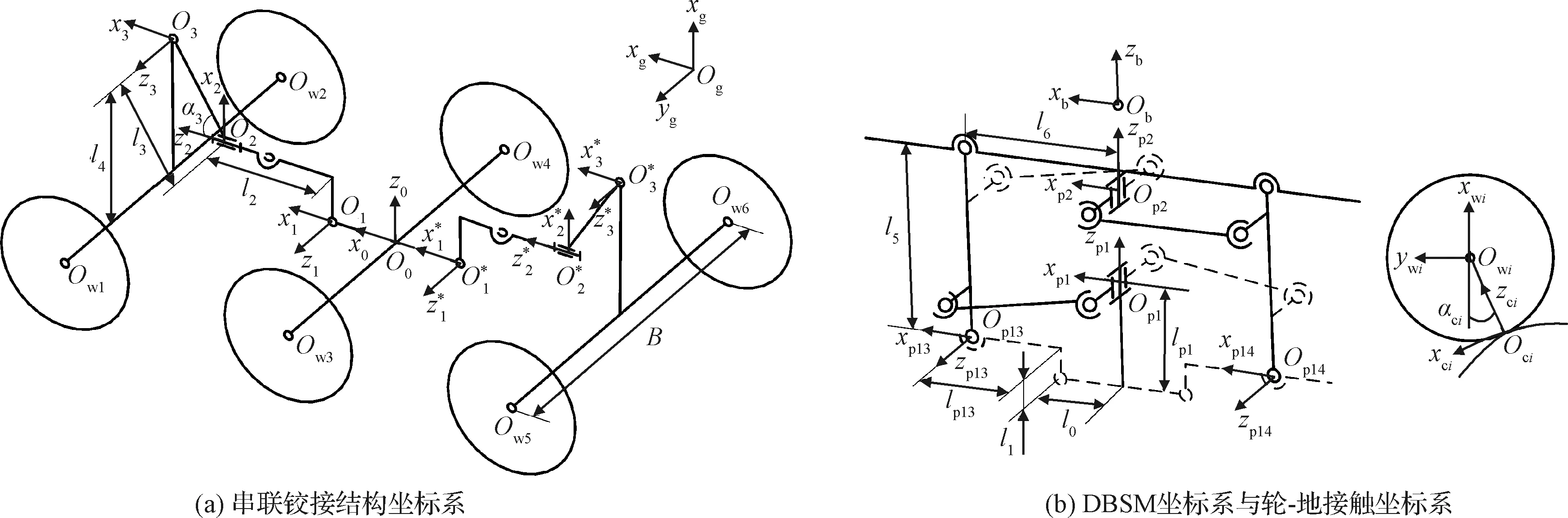
图5 星球车坐标系及其几何参数示意图Fig.5 Coordinate frames and geometry parameters of rover
为了便于推导坐标系间的齐次变换矩阵,建立了父子坐标系关系树,如图6所示。该树的根节点是悬架坐标系{O0},相对于地面坐标系{Og}有6个自由度,其位置和姿态可以用一个六维向量gq0=(x0,y0,z0,ψ0,β0,φ0)T表示,其中ψ0表示横滚角,β0表示俯仰角,φ0表示偏航角。悬架坐标系与地面坐标系之间的齐次变换矩阵为:
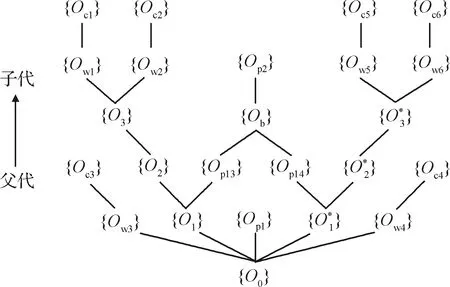
图6 父子代坐标系关系图Fig.6 Relationship of the parent-child coordinate system
(1)
式中:
(2)
式(2)中的“s”, “c”分别为三角函数sin和cos的缩写,并适用于后续公式中。由图6可知,除{Ob}外的每个坐标系有且只有一个父坐标系。根据D-H规则和移动系统模型,可以得到子坐标系i及其父坐标系p(i)所对应的D-H参数(li,αi,di,θi)由此每对父子坐标系间的齐次变换矩阵可由下式得出:
(3)
基于父子坐标系间的齐次变换矩阵,接触坐标系{Ock}相对于地面坐标系{Og}的齐次变换矩阵为:
gTck=gTp(i)·p(i)Ti·iTck
(4)
式中:轮地接触坐标系原点在车轮坐标系中的坐标可表示为wiqOci=[-rcosαci, -rsinαci, 0]T。
由于DBSM的约束,车厢只能沿悬架坐标系{O0}的z轴上下移动,则车厢坐标系{Ob}相对于悬架坐标系{O0}的广义坐标可以用0qb=[0, 0,zb(θ1), 0, 0, 0]T表示,其中前三项为位置坐标,而后三项表示方向。此外,关节坐标系{Op1}, {Op2}相对于坐标系{O0}的广义坐标可分别表示为0qp1=[0, 0,lp1, 0, 0,φp1(θ1)]T和0qp2=[0, 0,zp2(θ1), 0, 0,φp2(θ1)]T。上述坐标系与{O0}间的齐次变换矩阵分别为:
(5)
(6)
(7)
式中:zb,φp1,zp2和φp2均为θ1的函数;θ1为星球车前俯仰臂与xg轴正向的夹角,可通过角度传感器获得,也可以利用几何约束条件计算获得。
3.2 新型主—被动悬架准静力学建模
与星球车运动学建模思路相似,分别以DBSM机构、车厢、串联铰接结构和车轮为研究对象,建立越障状态的准静力学平衡方程,为星球车移动系统爬越障碍的计算分析提供数学模型。
1)DBSM和车厢静力学模型
DBSM和车厢的受力情况如图7所示,作用在关节Op1,Op13和Op14上的力表示为Fxpj和Fzpj(j=1, 13,14),Tp1为回转关节Op1的驱动力矩,当星球车移动系统处于被动运动模式时为零,Gb为一体式车厢的重力。向量IqS,Q=[xS,Q,yS,Q,zS,Q]T表示在坐标系I中由起点S指向终点Q的向量,可通过星球车的运动学推导得到:

图7 DBSM和车厢受力示意图Fig.7 Force of the DBSM and integrate platform
(8)
通过星球车的运动学模型,各结构间的位置关系均已知,则DBSM的静态平衡方程为:
(9)
式中:MOb,Mp11和Mp12分别表示相对于车厢坐标系原点Ob、关节p11和p12轴线的力矩。
另外,由于支撑杆和平衡杆的球铰关节间的连杆是二力杆,互为反作用力的Fpj和F′pj必然沿杆方向等大反向,即Fpj=-F′pj,其中j∈(3, 4, 7, 8),有:
(10)
如图7(c)所示,根据DBMS的结构特点,可以得到作用在关节pj(j=1,3,4,7,8)处各力间的平衡方程为:
(11)
式中:Mp1和Mp2分别为平衡杆受力对关节p1, p2轴线的力矩。另外将式(10)代入式(11)可得:

(12)
式中:

式(9)~(12)即为DBSM和车厢的静力学模型。
2)两轮同时越障模型
由于两侧车轮同时越障时的阻力最大,因此本文着重分析两轮同时爬越垂直障碍的能力。越障过程中,星球车左右侧的位形对称,故可建立如图8所示的新型主-被动悬架前、中和后轮爬越台阶型障碍的简化力学模型。

图8 两轮同时越障力学模型Fig.8 Mechanical model of wheels surmounting an obstacle
图8中力F′xpj和F′zpj是DBSM对串联交接结构的作用力,满足F′xpj=-Fxpj,F′zpj=-Fzpj;Gwk,Fnk和Ftk分别表示k车轮的重量和轮-地接触点处的法向力、切向力。为简化准静力学模型,假设在车轮越障过程中不存在滑转和侧滑,且地面为车轮提供的摩擦系数μ均相同,即满足:
|Ftk|=μ|Fnk| (k=1,…,6)
(13)
在星球车的整个越障过程中,星球车前、中、后轮同时越障的准静力学平衡方程均由式(14)~ (15)来表示:
(14)
同时,系统局部还存在相对俯仰关节轴线的平衡方程:
(15)

综上,式(9)~(15)为星球车移动系统两轮同时越障的准静力学模型,包含10个独立的平衡方程和10个未知参数。利用准静力学平衡方程,可以对星球车越障时需要满足的力学条件进行分析,得到垂直越障的性能参数。
4 新型主-被动悬架式星球车垂直越障性能分析
由于爬越高度等于车轮直径的垂直障碍所需要的摩擦系数不会受到车辆尺寸的影响[14],因此本节星球车被动、半主动和主动垂直越障性能分析中的垂直障碍的高度均设置等于车轮直径,并将爬上障碍所需的最小摩擦系数μreq作为越障性能的评价准则,对本文所提出的新型主-被动悬架与其它几种典型悬架的垂直越障性能进行了对比讨论。
4.1 新型主-被动悬架结构参数
图5所示的星球车移动系统的整体外包络尺寸为1 300 mm×750 mm×820 mm,总质量预估为100 kg,图中主要构件的尺寸参数和质量见表1。
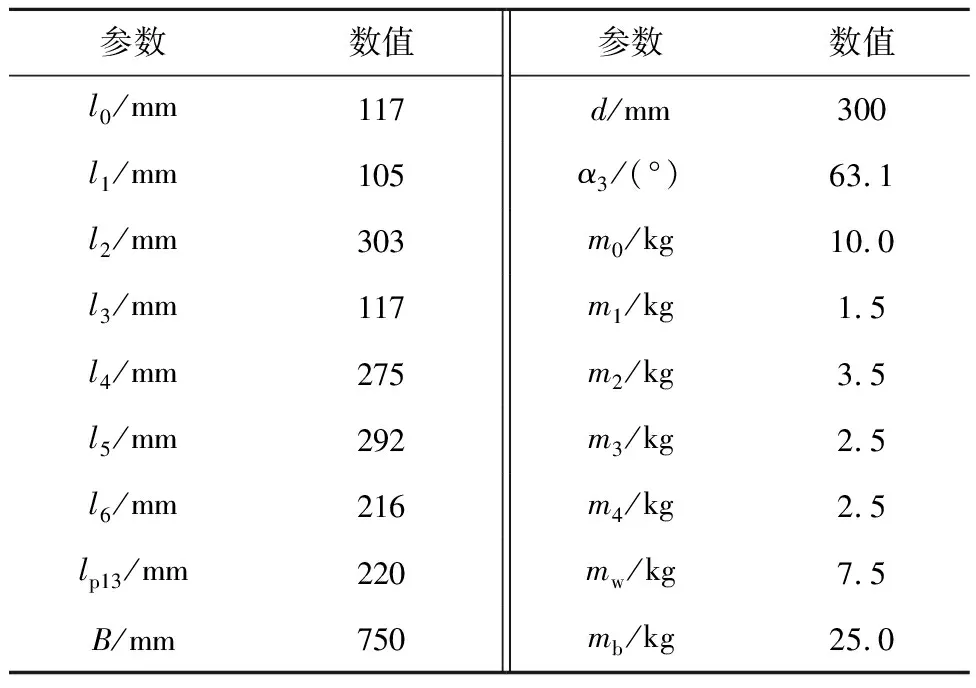
表1 新型主被-动悬架结构参数Table 1 Structure parameters of new active-passive suspension
4.2 被动垂直越障性能分析
星球车的垂直越障过程大致可分为前、中和后轮三个越障阶段。在星球车被动地爬越高度hobs=300 mm的垂直障碍过程中,前、后摆动关节的角度始终保持(φF=0,φR=0)不变,将以上已知参量代入星球车两轮同时越障的准静力学平衡方程中,可求得各越障阶段中车轮的摩擦系数需求与越障轮离地高度的关系曲线,如图9所示。从图中可以看出,前、中轮越障阶段中车轮的摩擦系数需求随越障轮离地高度的增加而逐渐减小,则在前、中轮越障阶段中越障轮刚与地面脱离接触时车轮的摩擦系数需求最大,分别为0.52和0.69;后轮越障阶段中车轮的摩擦系数需求在越障轮离地150 mm (即后轮轴线与垂直障碍的踏面等高)时达到最大为0.74,即当地面能够提供的摩擦力不小于0.74时,星球车可以被动地越过高度等于车轮直径的垂直障碍。
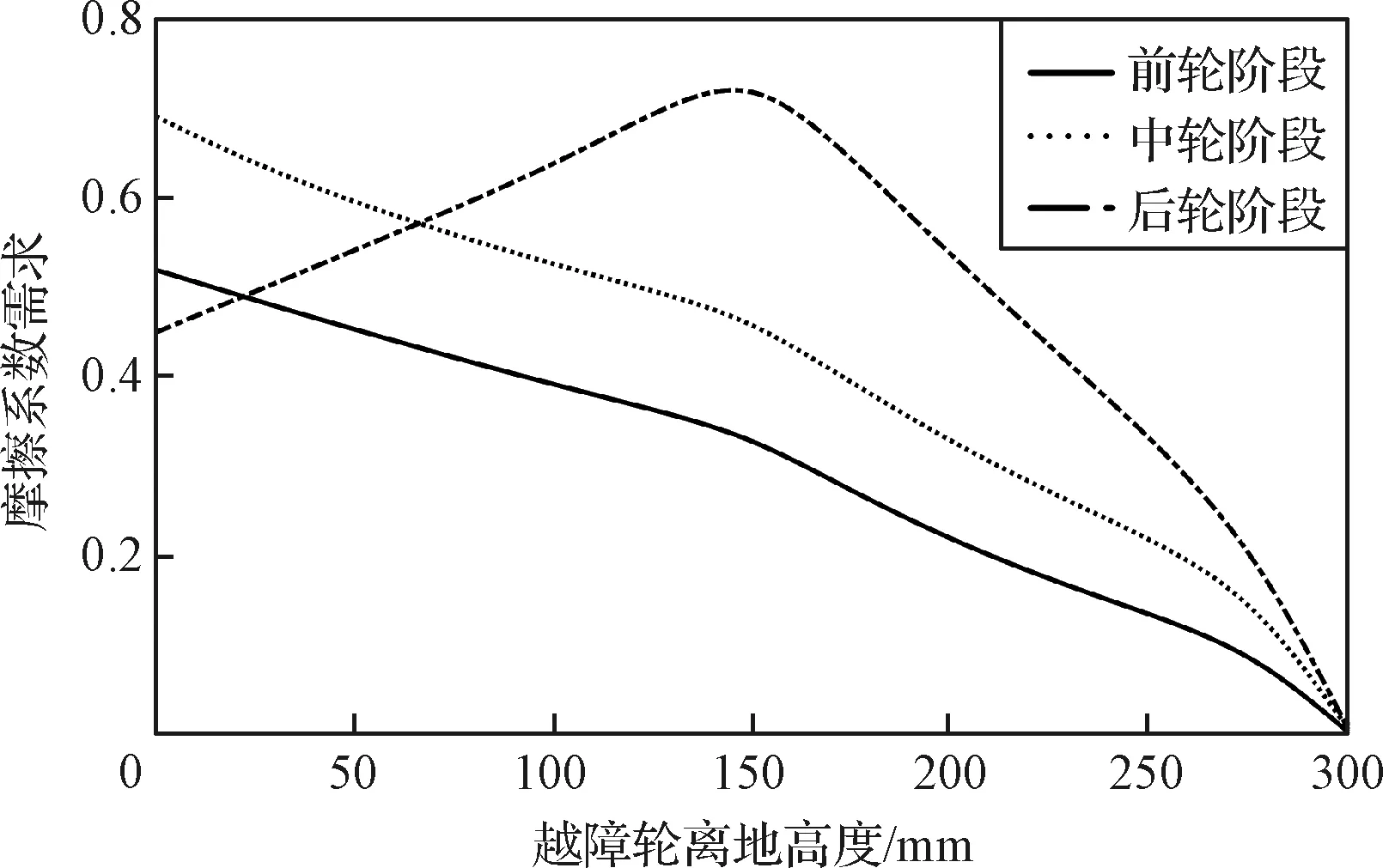
图9 被动越障的各阶段中摩擦系数需求与越障轮离地高度的关系曲线Fig.9 Curves of friction coefficient requirement and height from the ground in each stage of passive obstacle-climbing
4.3 半主动垂直越障性能分析
根据2.1节对星球车半主动垂直越障过程的描述,并结合4.2节前、中、后轮分别实现爬越需要克服的临界状态,星球车各阶段实现爬越所需要的摩擦系数与前、后摆动关节角度(φF,φR)间的关系通过两轮同时越障的准静力学平衡方程计算得到,如图10所示。
在星球车半主动越障中的前轮越障阶段,前、后摆动关节角度的增大均能降低车轮的摩擦系数需求,且后摆动关节角度的影响相对来说更加明显;当前、后摆动关节角度展开至极限位置时,前轮实现爬越障碍所需的摩擦系数最小。在星球车半主动越障中的中轮越障阶段,车轮的摩擦系数需求随着前摆动关节角度的增大而减小,随着后摆动关节角度的增大而增大;当前摆动关节展开至极限位置、后摆动关节为初始位置时,中轮实现爬越障碍所需的摩擦系数最小。在星球车半主动越障中的后轮越障阶段,前、后摆动关节角度的增大均能降低车轮的摩擦系数需求,且后摆动关节角度的影响更加明显;当前、后摆动关节角度展开至极限位置时,后轮实现爬越障碍所需的摩擦系数最小。

4.4 主动垂直越障性能分析
根据2.2节星球车主动越障的运动策略,为使前、中、后轮越障三个阶段中车轮的最大摩擦系数需求能够趋近相同,每个越障阶段角度调节器提供的主动力矩变化情况如图11所示,图中正负号分别表示力矩沿顺时针和逆时针方向(俯视视角)。
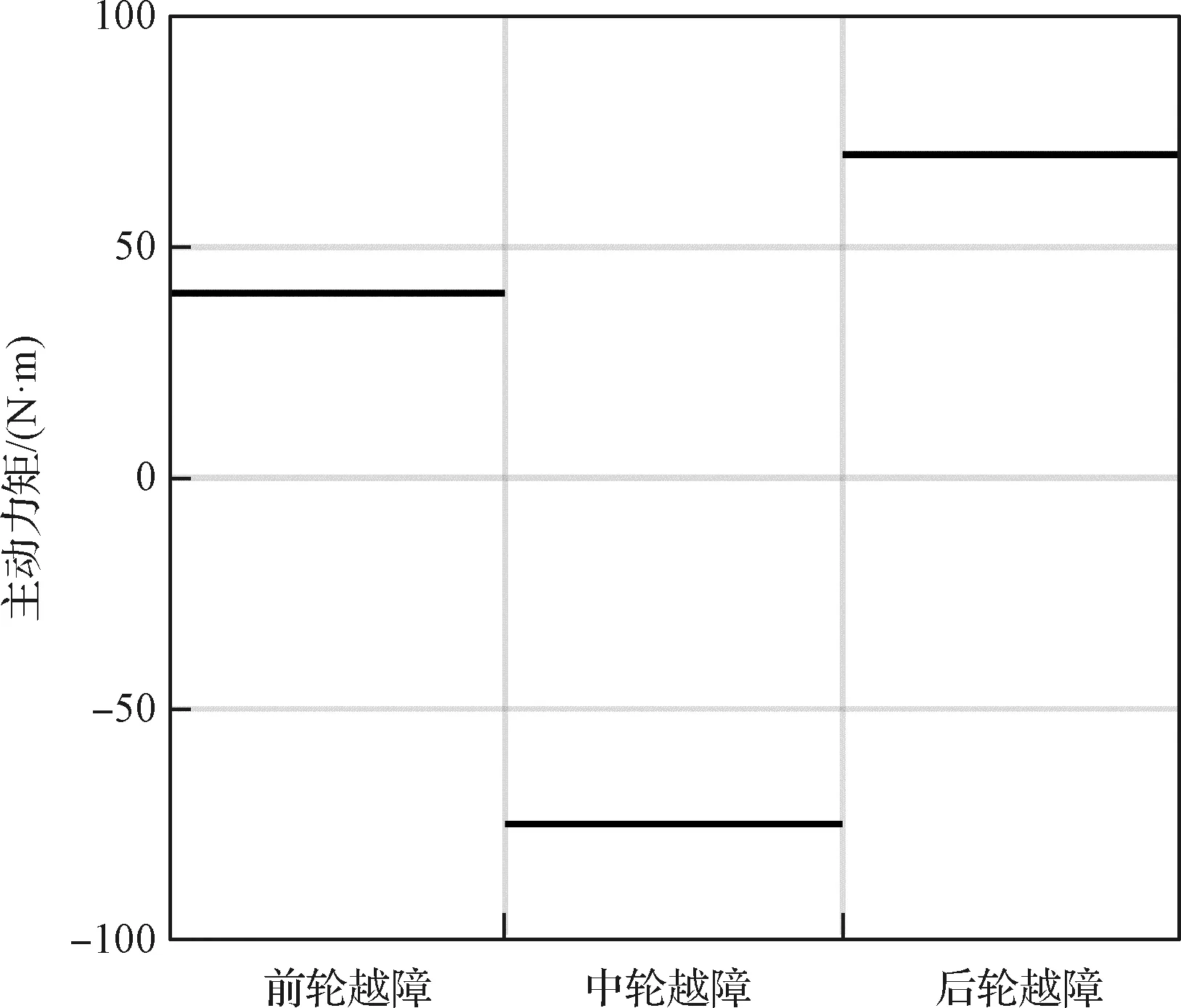
图11 主动越障各阶段主动力矩变化情况Fig.11 Active torque in the active obstacle-climbing
通过求解星球车两轮同时越障的准静力学平衡方程,可得到各越障阶段车轮的摩擦系数需求与越障轮离地高度间的关系曲线,如图12所示。从图12中可以看出,在主动力矩的辅助下,前轮越障阶段的摩擦系数需求随越障轮离地高度的增加逐渐减小,而中、后轮阶段的摩擦系数需求均为先增大后减小;另外,前、中、后轮越障三个阶段中的最大摩擦系数需求均不超过0.43,比半主动越障性能提升了大约30%。
图12 主动越障的各阶段中摩擦系数需求与越障轮离地高度的关系曲线Fig.12 Curves of friction coefficient requirement and height from the ground in each stage of active obstacle-climbing
4.5 讨 论
对本文所提出的新型主-被动悬架星球车与其它几种典型悬架星球车的摩擦系数需求进行了对比,如表2所示。从表中可以看出,新型主-被动悬架星球车的被动越障性能好于Marsokhod、Hylos-II、ExoMars、侧置摇臂式悬架星球车;新型主-被动悬架式星球车的半主动越障性能接近甚至优于祝融号、ExoMars、Marsokhod星球车的主动越障性能;新型主-被动悬架式星球车的主动越障能力(摩擦系数需求为0.43)较祝融号(摩擦系数需求为0.62)有显著提高。可见,本文所提出的新型主-被动悬架式星球车拥有更强的越障能力。
表2 悬架越障性能对比Table 2 Comparison of the obstacle-climbing performance
5 仿真校验
本文采用多体动力学软件ADAMS进行新型主-被动悬架星球车半主动和主动垂直越障仿真,对数学模型计算结果进行验证。仿真模型中,星球车主要构件的质量见表1,各构件质心位于构件几何中心。半主动和主动越障仿真中的障碍高度等于车轮直径(hobs=300 mm),重力加速度设置为9.8 m/s2。
在半主动越障仿真中,悬架的前、后摆动关节角度将按4.3节的规划调整。经过反复仿真,当轮-地摩擦系数为0.65时,星球车能够顺利爬上障碍且过程中车轮未发生滑动,星球车半主动越障的仿真过程和越障过程中车轮、车厢在竖直方向的位移如图13所示。初始时,星球车处于标称状态;星球车的前、中、后轮分别在34.8 s, 71.2 s, 99.7 s爬上障碍;t=120 s时,前、后摆动关节均收拢至初始位置,星球车恢复至标称状态。各轮在整个半主动越障运动仿真过程中的法向力Fn如图14所示,前轮越障时中轮和后轮的法向受力基本相同,中、后轮越障时后轮和中轮的法向受力均较前轮大很多,从而证实了星球车半主动越障的性能取决于中轮或后轮。

图13 半主动越障仿真Fig.13 Semi-active obstacle-climbing simulation

图14 半主动越障中各轮法向受力Fig.14 Normal force of wheels in semi-active mode
星球车主动越障仿真中的主动力矩将设置为图11中的变化情况,越障策略则按照图4所示进行。经过反复仿真,星球车轮-地摩擦系数需要为0.46时才能无滑动地爬上障碍,其仿真过程和越障过程中车轮、车厢在竖直方向的位移如图15所示。初始时刻同样处于标称状态;在18~40 s内,关节调节器输出力矩设为40 N·m,方向为顺时针方向(俯视视角,下同);在40~55 s内,输出力矩设为75 N·m,方向为逆时针方向;在83~100 s内,输出力矩设为70 N·m,方向为顺时针方向。各轮在整个主动越障运动仿真过程中的法向力Fn如图16所示,在主动力矩的作用下,各轮的法向受力曲线抖动相较于半主动越障更加平缓,且中、后轮越障时所受的法向力更小,因此主动越障模式的越障性能更强。

图15 星球车主动越障仿真Fig.15 Active obstacle-climbing simulation of rover

图16 主动越障中各轮法向受力Fig.16 Normal force of wheels in active mode
由以上仿真可知,新型主-被动悬架式星球车能够实现半主动、主动越障的摩擦系数需求分别为0.65和0.46,与准静力学模型计算的理论值相对误差分别为4.8%和7.0%,考虑到仿真中接触约束存在弹性的影响,误差在允许范围之内。因此,本文所提出的新型主-被动悬架式星球车主动越障性能较于摇臂-转向架式悬架星球车至少可提升25.8%(二者摩擦系数需求分别按0.46和0.62比较)。
6 结 论
本文提出了一种新型主-被动悬架式移动系统构型,通过对该星球车垂直越障进行运动学和准静力学分析,得出如下结论:
1) 新型主-被动悬架式星球车移动系统采用双差动连杆悬架机构连接前后两节的三对车轮,具有被动、半主动和主动三种行驶运动模式,三种模式垂直越障的摩擦系数需求理论值分别为0.74,0.62和0.43,其中主动越障模式的越障性能最强。
2)悬架变形可显著改善星球车的越障性能,半主动模式垂直越障的摩擦系数需求值不超过0.65,相较于被动模式提高了16.2%左右。
3)新型主-被动悬架式星球车主动越障的摩擦系数需求值不超过0.46,相较于摇臂-转向架式悬架星球车,其越障性能可提升25.8%左右。
分析结果表明,本文的新型主-被动悬架式星球车的摩擦系数需求更小、越障能力更强。
