SHINE超导波荡器磁场点测量霍尔探头位置标定
2023-09-21吴泽州张继东陈金雅周巧根1
吴泽州 张继东 陈金雅 周巧根1,
1(中国科学院上海应用物理研究所 上海 201800)
2(中国科学院大学 北京 100049)
3(中国科学院上海高等研究院 上海 201204)
波荡器(Undulator)是一种由极性正负交替排列的周期性磁体组成的装置。其基本原理:使在磁场中运动的带电粒子受到一个横向力,带电粒子受横向力的作用形成周期性的运动轨迹,进而产生强烈的辐射。由于波荡器产生的这种辐射具有高度的准直性和相干性,使其成为同步加速器光源和自由电子激光器中的关键部件。波荡器中的磁体可以是永磁体也可以是超导磁体,大多数安装在光源上的波荡器使用的是永磁体。与永磁波荡器相比,超导波荡器(Superconducting Undulator,SCU)可以在相同周期下获得较高的峰值磁场,从而产生高亮度的X射线[1]。到目前为止,磁体长度在2 m 以内的SCU已由国内外多家单位研制成功并实现了在电子储存环上的运行,如德国的ANKA(ANgstrom Source KArlsruhe)、美国的APS(Advanced Photon Source)等 光 源[2-4],俄 罗 斯 的BINP(Budker Institute of Nuclear Physics)研制了峰值磁场为1.2 T 的SCU 样机[5]。低温、封闭的磁气隙是超导波荡器的特征之一,对于超长磁体长度SCU的研制以及其磁场测量技术目前尚不成熟。
针对超导波荡器磁测环境的特殊性,德国安卡同步辐射光源(ANKA)和美国阿贡国家实验室的先进光子源(Advanced Photon Source,APS)分别开发了应用于超导波荡器的磁测系统。其中,ANKA 光源的磁测系统采用磁测滑车配合精密导轨的方案进行磁场测量[6-8],APS的超导波荡器采用带有束流真空室的结构,通过一根长约2 m 的悬臂梁探杆进行磁场测量[9-10]。正在研制的一台SHINE超导波荡器样机SCU16,作为世界首台超长磁长度、超小磁气隙的真空内超导波荡器,对其磁测系统提出了很高的要求。本文主要介绍SCU16 的霍尔探头磁场点测量系统,以及霍尔探头灵敏中心的高精度位置标定。高精度的磁场测量对波荡器的磁场标定和矫正具有重要意义。
1 SCU16磁场点测量系统
霍尔探头点测量目前仍然是获得波荡器磁场最可靠的一种测量手段,SCU16 也采用霍尔探头作为主要磁场测量工具。该超导波荡器没有束流真空室,是一台净气隙高度仅为4 mm、长度为4 m 的超小间隙、超长长度的真空内超导波荡器。波荡器的磁气隙为5 mm,气隙内距左右磁极面0.5 mm 处悬挂两片铜箔带用于屏蔽束流热负载[11]。磁场测量时,装有霍尔探头的磁测滑车要通过这个狭长的气隙进行磁场的on-fly点测量。磁测系统由霍尔探头磁测滑车、三维激光定位系统以及运动控制和数据采集系统等部分组成。
如图1 所示,三枚Arepoc HHP-VU 型霍尔探头固定在一块长120 mm、宽46 mm、厚3.8 mm 的G10板(磁测滑车)上。其中y轴为波荡器水平方向,x轴为波荡器竖直方向,z轴为波荡器长度方向,1号和2号霍尔探头处于不同的y位置处,用于测量水平磁场(主磁场),3 号霍尔探头测量垂直磁场。磁测滑车上除了安装霍尔探头外,还安装有温度传感器用于测量滑车上的温度,磁测滑车尾部中心处装有直径3 mm 的角锥棱镜以便采用激光定位系统对磁测滑车进行三维定位。
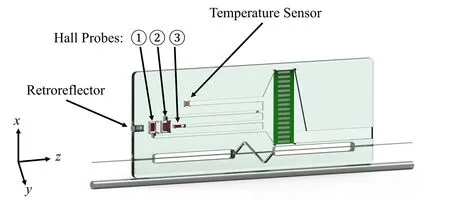
图1 磁测滑车传感器布局图Fig.1 Diagram of sensor layout for the magnetic field measurement sledge
理想情况下平面型波荡器气隙内的主磁场By满足以下关系:
式中:y0为磁中心平面在波荡器坐标系中的y轴坐标;By0是磁中心轴线上的峰值磁场;λu为波荡器的周期长度。实际波荡器气隙内的主磁场By并不完全满足方程(1),但在中心平面附近By随y的变化可近似为cosh 曲线。因此利用y1和y2两个位置处霍尔探头测到的主磁场可以得到磁中心平面上的主磁场:
式中:By1(z)和By2(z)分别为1 号和2 号霍尔探头所测得的主磁场;Δy为两个霍尔探头灵敏中心y方向的间距,可通过霍尔探头灵敏中心的位置标定得到。
通过标定霍尔探头灵敏中心与角锥棱镜顶点之间的位置关系,再利用外部三维激光定位系统测到的角锥棱镜顶点的运动轨迹,可间接测得霍尔探头灵敏中心在超导波荡器气隙中的精确位置。三维激光定位系统如图2 所示,包括一套Keysight 激光干涉仪、Basler CCD(Charge Coupled Device)相机、聚焦透镜组以及其他光机组件。
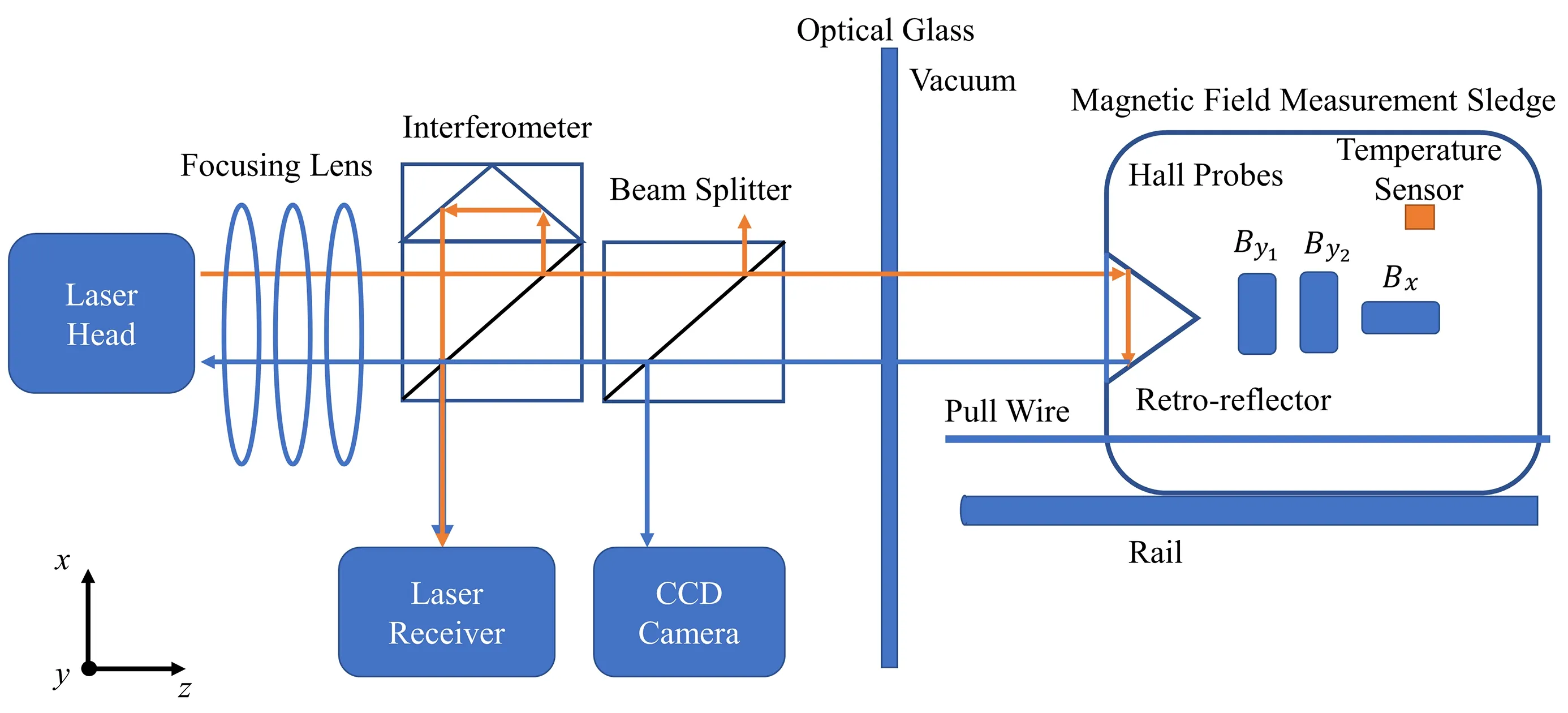
图2 霍尔探头磁测滑车激光三维定位原理图Fig.2 Principle schematic of the laser 3D-positioning of the magnetic field measurement sledge
3 mm 直径的激光束由激光器发出穿过光学玻璃进入波荡器真空腔体,经过磁测滑车上的角锥棱镜反射,在分光镜处一部分光束被投射到CCD相机上,CCD相机上的图像用于确定角锥棱镜在波荡器内横向位置的变化,根据角锥棱镜的特性可知光斑在CCD 相机上的位移量是角锥棱镜顶点位移量的两倍[12],且与角锥棱镜在磁测滑车上的安装角度无关,如图3 所示。经过分光镜后的光束到激光干涉仪的接收器用于测量角锥棱镜在波荡器内的纵向位置,激光干涉仪同时给CCD 相机、霍尔探头以及温度探头的数据采集提供触发信号。

图3 水平方向角锥棱镜与CCD光点位移关系Fig.3 Relationship between the retro-reflector and laser spot on the CCD in the horizontal direction
2 霍尔探头与角锥棱镜位置标定
霍尔探头灵敏中心以及角锥棱镜顶点的位置标定基于这样一个原理,将磁测滑车绕其长度方向的翻转轴做180°翻转,三枚霍尔探头和角锥棱镜将会同时绕其翻转,如图4所示,磁测滑车上的十字交叉点为霍尔探头灵敏中心点,其翻转前位置为(x1,y1),翻转后位置为(x2,y2),则霍尔探头灵敏中心与磁测滑车翻转轴距离分别为:
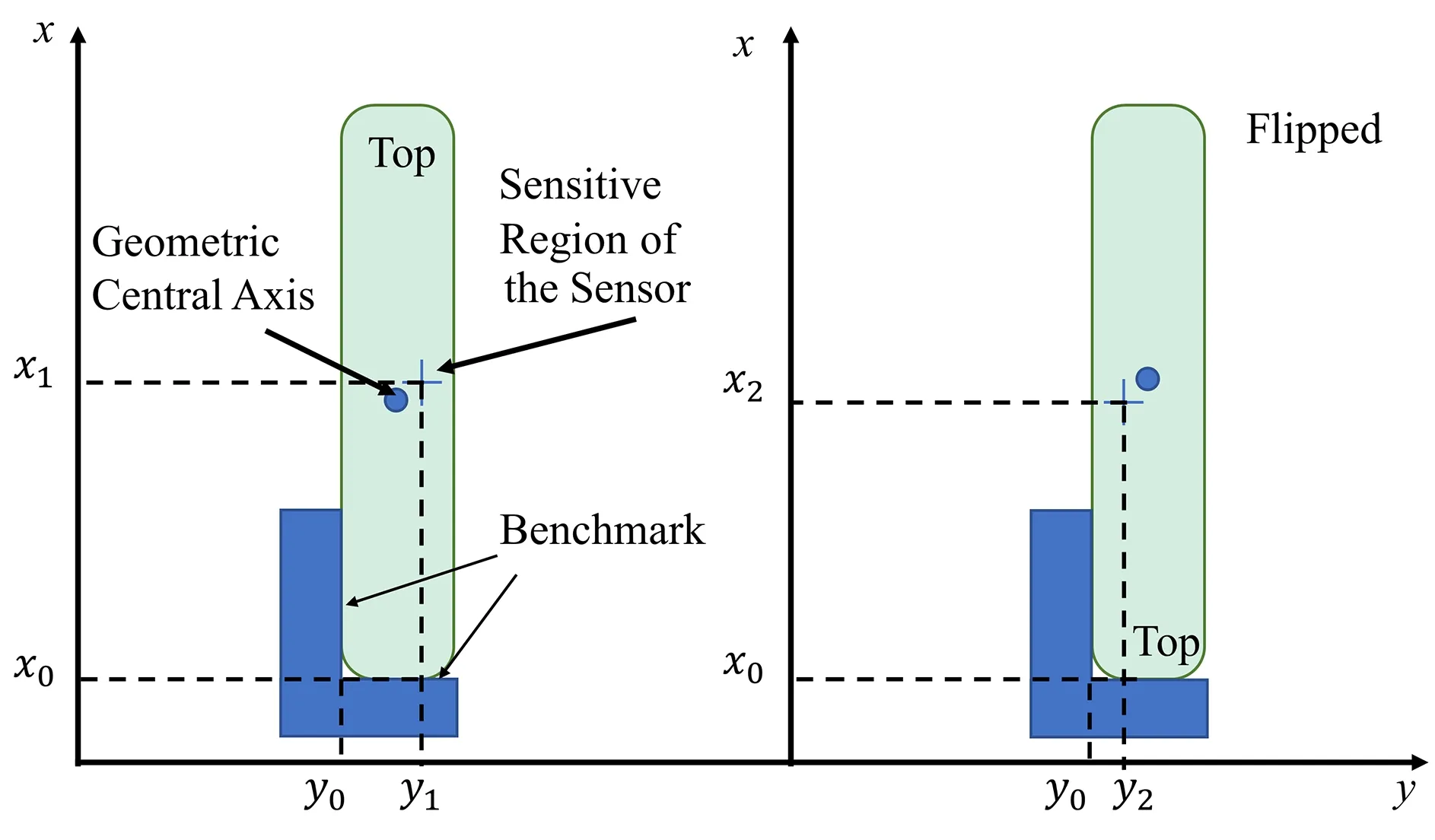
图4 霍尔探头翻转标定原理Fig.4 Schematic diagram of flipping calibration principle for Hall probes position
同理分别标定各霍尔探头灵敏中心以及角锥棱镜顶点与磁测滑车翻转轴的位置关系,即可确定霍尔探头灵敏中心与角锥棱镜顶点的位置关系。
2.1 霍尔探头位置标定
采用一个长方体永磁块吸附在楔形块底部,如图5所示,永磁块的磁化方向与楔形块底面垂直,对霍尔探头灵敏中心位置与磁测滑车翻转轴的位置进行标定。由于楔形块的特殊结构,其By(平行于永磁块磁化方向)沿x轴为对称分布,而Bx沿x轴为反对称分布,Bx的零点对应于By的峰值点[13]。翻转前后,磁测滑车霍尔探头沿x轴测得Bx的零点与By的峰值点位置必将存在位置偏移,位置偏移量的二分之一为各个霍尔探头灵敏中心距离磁测滑车翻转轴的距离。
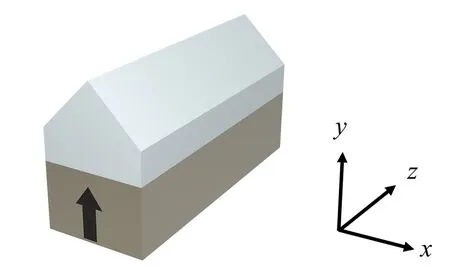
图5 永磁块吸附的铁楔形块三维图Fig.5 3D diagram of iron wedge-shaped block adsorbed by a permanent magnet block
霍尔探头位置标定平台如图6 所示,三维运动平台与楔形磁块安装于同一大理石平台上,磁测滑车通过夹具安装于三维运动平台上,磁测滑车安装面紧贴夹具的两个安装基准面,且运动平台配备有RENISHAW 公司RGH22 系列光栅尺。使水平夹持的磁测滑车在楔形磁块上方沿x方向扫过,如图6(a)所示,三个霍尔探头测到的磁场分布如图7(a)所示。将三维运动平台回到零位,磁测滑车翻转180°重新装夹到三维运动平台上,磁测滑车扫过楔形块,再次得到三个霍尔探头的磁场分布如图7(b)所示。对1 号和2 号霍尔探头翻转前后所测得的磁场分布进行插值得到的磁场峰值位置分别为y1、y2和y4、y5,对3号霍尔探头翻转前后所测得的磁场分布进行插值得到的磁场零点位置分别为y3和y6。以上测量进行三次,结果如表1所示。
表1 磁测滑车水平放置时,霍尔探头测得磁场分布峰值与零点的位置Table 1 Peak and zero positions of the magnetic field distribution measured by the Hall probes on a horizontallyplaced sledge
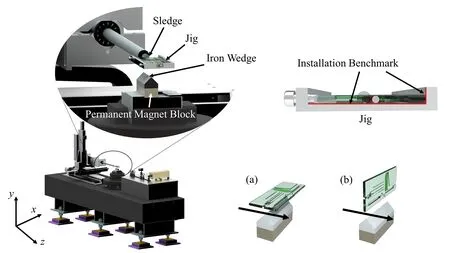
图6 磁测滑车装夹在三维高精度运动平台的照片 (a) 磁测滑车水平放置,(b) 磁测滑车垂直放置Fig.6 Photograph of the magnetic field measurement sledge mounted on a 3D high-precision mechanical arm(a) Horizontally-placed sledge, (b) Vertically-placed sledge
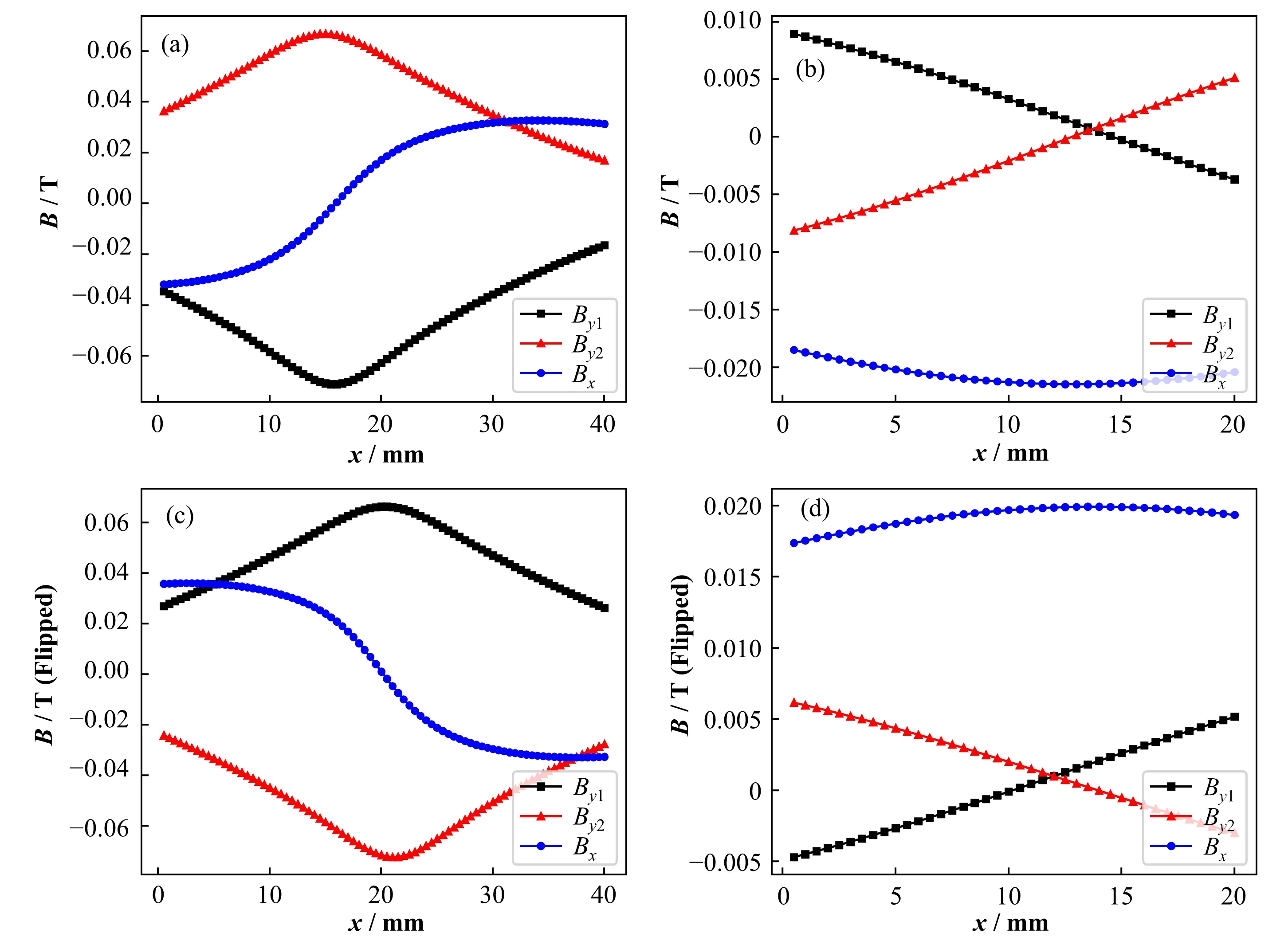
图7 三枚霍尔探头测量获得的磁场分布(a) 水平放置,(b) 垂直放置,(c) 水平放置、磁测滑车翻转180°,(d) 垂直放置、磁测滑车翻转180°Fig.7 Magnetic field distribution measured by the three Hall probes(a) Horizontally-placed, (b) Vertically-placed, (c) Horizontally-placed with a flipped magnetic measuring sledge, (d) Vertically-placed with a flipped magnetic measuring sledge
将磁测滑车垂直夹持,使其在楔形磁块上方沿x方向扫过,如图6(b)所示,三个霍尔探头测到的磁场分布如图7(c)所示。将三维运动平台回到零位,磁测滑车翻转180°重新装夹到三维运动平台上,磁测滑车扫过楔形块,再次得到三个霍尔探头的磁场分布如图7(d)所示。对1号和2号霍尔探头翻转前后所测得的磁场分布进行插值得到的磁场零点位置分别为x1、x2和x4、x5,对3号霍尔探头翻转前后所测得的磁场分布进行插值得到的磁场峰值位置分别为x3和x6。同样,以上测量进行三次,结果如表2所示。
表2 磁测滑车竖直放置时,霍尔探头测得磁场分布峰值与零点的位置Table 2 Peak and zero positions of the magnetic field distribution measured by the Hall probes on a verticallyplaced sledge
根据式(3)可得到各个霍尔探头的灵敏中心位置和翻转轴的横向距离,见表3。同时得到1号霍尔探头灵敏中心和2 号霍尔探头灵敏中心x方向距离为0.831 mm,y方向距离为- 1.845 mm;1 号霍尔探头灵敏中心和3 号霍尔探头灵敏中心x方向距离为- 0.28 mm,y方向距离为- 1.767 mm。
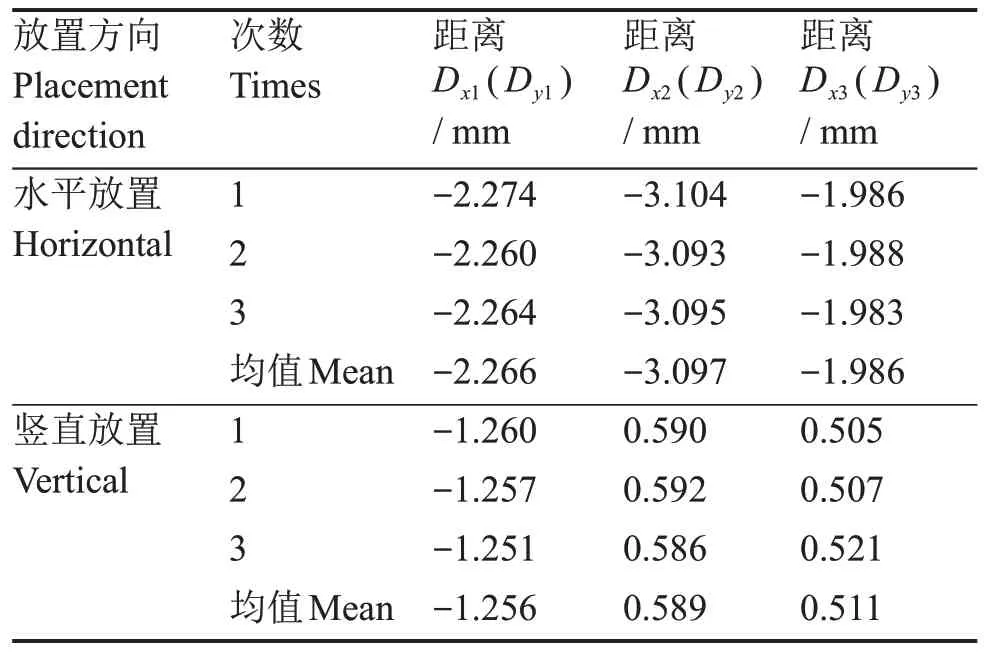
表3 各个霍尔探头灵敏中心与翻转中心距离Table 3 Position of the Hall probes' center of rotationand offset distance
2.2 角锥棱镜位置标定
角锥棱镜位置标定平台如图8 所示,将磁测滑车装夹在三维运动平台上,激光器发射激光由磁测滑车上角锥棱镜反射经过分光镜到达CCD相机。
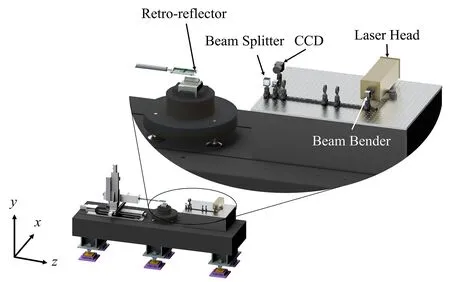
图8 角锥棱镜位置标定装置示意图Fig.8 Diagram of retro-reflector position calibration apparatus
由图3可知,三维运动平台夹持磁测滑车沿x方向位移l时,光斑在CCD相机上沿z方向位移2l。若以相机上的像素pixel为单位,则CCD相机拍摄光斑位置与磁测滑车位置关系如式(4)所示:
其中:(Pzc,Pyc)为光斑质心所在CCD像面上的位置,单位为像素pixel,通过灰度质心法[14]求得,如式(5)所示,xencoder、yencoder分别为三维运动平台x轴和y轴光栅尺读数,单位为mm。az、ay分别为两个方向上光斑与磁测滑车实际位移比例,单位为像素·mm-1,bz,by为磁测滑车起始位置处CCD 相机拍摄的光斑位置与磁测滑车位置的偏置,单位为像素。
其中:I(i,j)为图片中像素点(i,j)位置处的灰度值。
移动三维运动平台将激光移入磁测滑车角锥棱镜中,并沿着x方向间隔111 μm拍摄3组照片,每组拍摄50 张照片,通过对每组照片的质心点取平均值。将磁测滑车翻转后继续拍摄3 组照片,同时光栅尺坐标零点与翻转前保持一致,计算得到翻转前后光斑图像质心点与角锥棱镜顶点位移的线性关系曲线如图9所示。
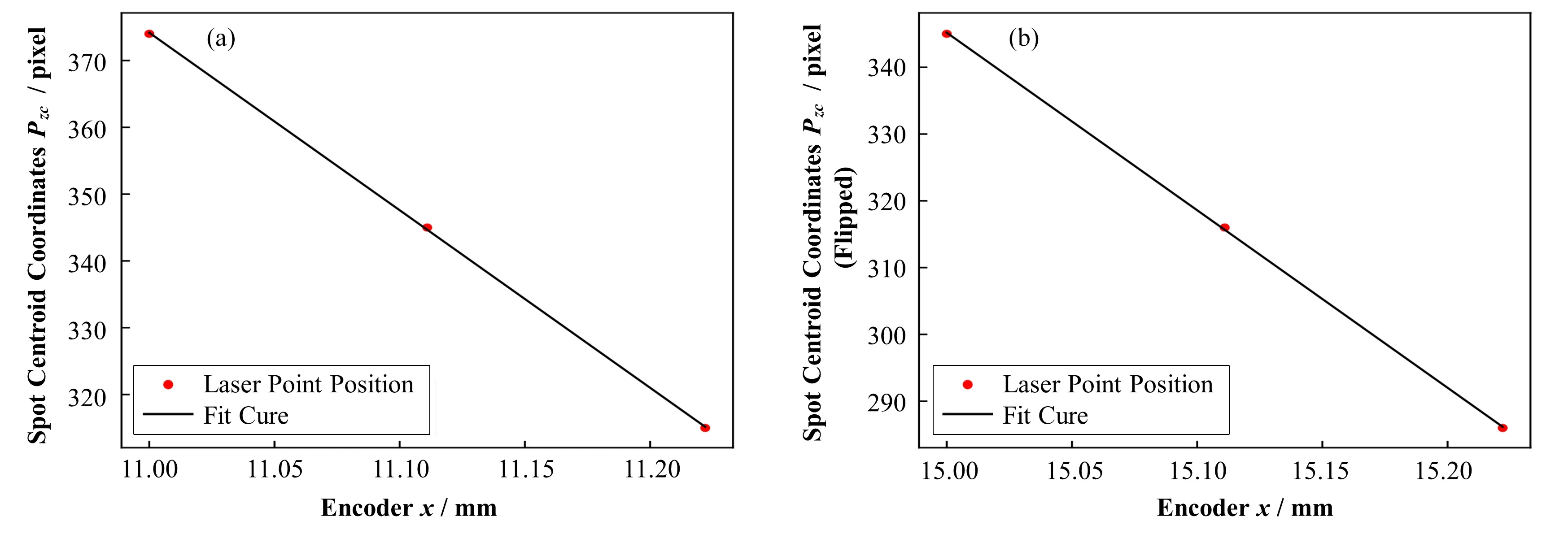
图9 翻转前(a)、后(b)磁测滑车位置与质心点坐标线性曲线Fig.9 Linear curve of the sledge displacement before (a) and after (b) sledge flipping and the coordinates of the centroid position
翻转前后通过拟合得到线性方程如式(6)所示:
可得翻转前后角锥棱镜顶点在x方向上位置变化为2Dxc为- 3.892 mm。同理,翻转前后角锥棱镜顶点在y方向上位置变化2Dyc为- 0.1 mm。
由上述标定流程结合表3 结果可知,角锥棱镜顶点与磁测滑车翻转轴在x方向距离为- 1.945 mm,y方向距离为- 0.050 mm。1 号、2 号和3 号霍尔探头与角锥棱镜顶点在x方向的距离分别为- 0.321 mm、- 1.152 mm 和- 0.041 mm,在y方向的距离分别为- 1.206 mm、0.639 mm和0.561 mm。
3 标定误差分析
影响霍尔探头灵敏中心标定误差主要是受两个方面的影响:一是磁测滑车翻转前后对应的安装面的不平行度;二是三维运动平台x轴向的运动导轨与楔形磁块x轴的不平行度。角锥棱镜位置的标定误差主要来源于是地面振动以及空气扰动造成的光斑定位误差,通过多次测量求平均可以消除由此带来的标定误差。
3.1 磁测滑车加工误差
由于磁测滑车安装到夹具的安装平面存在平行度误差,翻转前后霍尔探头所测到的磁场分量略有不同,导致测到的垂直磁场峰值位置和水平磁场零点位置产生误差。磁测滑车宽为46 mm,安装面的平行度为0.02 mm,因此,翻转前后霍尔探头的方位面变化范围在±0.43 mrad 内。通过Radia 程序可仿真得到这个误差。楔形磁块在两种高度(5.5 mm和23.5 mm)的水平面上产生的垂直磁场分量By和水平磁场分量Bx的分布如图10(a)和(c)所示。按翻转后霍尔探头的方位面变化θ= 0.43 mrad,位置高度变化2 mm估算,霍尔探头所测到的磁场垂直平分量和水平分量分别为-By+θBx和-Bx+θBy,其分布如图10(b)和(d)所示。从这些模拟结果可以看到,安装面的平行度误差产生的垂直磁场峰值位置的偏差为7 μm,产生的水平磁场零点位置的偏差为16 μm,由此产生的1 号和2 号霍尔探头灵敏中心的标定误差在x方向为±3.5 μm,在y方向为±8 μm,3 号霍尔探头灵敏中心的标定误差在x方向为±8 μm,在y方向为±3.5 μm 。
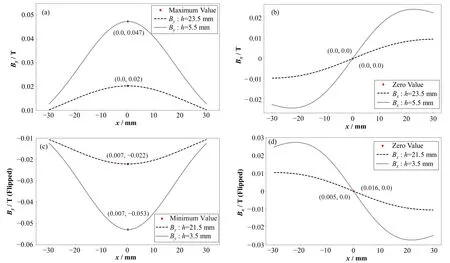
图10 磁测滑车加工误差对霍尔探头标定结果的影响(a) 水平放置,(b) 垂直放置,(c) 水平放置、磁测滑车翻转180°,(d) 垂直放置、磁测滑车翻转180°Fig.10 Influence of the sledge manufacturing error on Hall probe calibration result (a) Horizontally-placed sledge, (b) Verticallyplaced, (b) Flipped horizontally-placed magnetic measuring sledge, (d) Flipped vertically-placed magnetic measuring sled
3.2 三维运动平台导轨安装误差
如图11 所示,三维运动平台x轴向的运动导轨与楔形磁块x轴的不平行,导致霍尔探头在不同高度测得的垂直磁场峰值位置和水平磁场零点位置产生误差。测得三维运动平台的运动坐标系与楔形磁块x轴夹角在2 mrad 以内,且翻转前后霍尔探头敏感中心高度差为2 mm左右,由此引起的霍尔探头灵敏中心与磁测滑车翻转轴标定误差大约为±2 μm。

图11 运动平台与磁场坐标系不一致对霍尔探头标定结果的影响Fig.11 Influence of the discrepancy between the motion platform and magnetic field coordinate axes on the Hall probe calibration
3.3 标定误差对磁场测量的影响
波荡器磁场测量时,霍尔探头的测量位置是基于角锥棱镜的位置进行定位的,霍尔探头相对角锥棱镜的标定误差将直接影响到霍尔探头在波荡器气隙内的绝对位置,从而影响波荡器磁中心的标定。波荡器磁中心的标定误差一般要求为几十微米,从以上分析可以得到,本文给出的霍尔探头相对角锥棱镜的标定误差小于±10 μm,能满足磁中心标定的要求。
通过对1 号和2 号霍尔探头之间y方向的间距Δy做标定,可以利用式(2)计算得到磁中心轴上的By分布,显然Δy的标定误差将引起磁中心轴线上By的测量误差。从以上分析可知,1号和2号霍尔探头灵敏中心在y方向的间隔Δy为1.845 mm,标定误差不超过±20 μm。如果磁测滑车在沿z方向测量过程中其横向位置不变,这一标定误差会对磁中心轴上By的测量产生一个系统误差,利用式(2)可以估算得到这个系统误差约为±1‰。由于测量气隙为4 mm,磁测滑车的厚度为3.8 mm,因此磁测滑车在气隙内的横向位置会有±0.1 mm 的变化,这将使磁中心轴上By的测量产生一个随机误差。利用式(2)可以估算得到这一随机误差大约为±1‱,能满足波荡器磁场测量的要求。
4 结语
本文主要介绍了SHINE 超导波荡器磁场点测量系统中霍尔探头灵敏中心的高精度位置标定,通过翻转法将霍尔探头灵敏中心与角锥棱镜顶点建立位置关系,借助楔形磁块的特殊磁场以及三维激光定位平台分别对霍尔探头灵敏中心以及角锥镜顶点位置进行了标定,并对标定结果进行了误差分析,分析结果表明霍尔探头灵敏中心相对于角锥棱镜顶点标定精度好于±10 μm,满足SHINE超导波荡器点测过程中霍尔探头灵敏中心轨迹的高精度测量要求。
作者贡献声明吴泽州负责研究的提出及设计、数据的处理和整理起草论文并完成后续修订;张继东负责测控系统搭建;陈金雅协助误差分析;周巧根指导实验,指导并协助论文写作与修改。
