基于无人机平台的伽玛谱系统设计
2023-09-21徐煜洲雷晨曦
徐煜洲,陈 雪,雷晨曦,邓 伟
(中核战略规划研究总院,北京)
1 无人机选型和系统框架设计
1.1 无人机选型
针对不同的无人机,在飞行过程中存在不少的差异,为了更好地使软件与硬件相辅相成,需要确定采用一种既能够适应大范围飞行,又能兼顾较为优秀的续航和轻便能力的无人机,因此研究中对无人直升机、固定翼无人机、多旋翼飞行器、无人飞艇、太阳能无人机等常见的无人机在构型、载重能力、飞行速度、尺寸重量、续航、飞行高度、飞行距离、轻便能力等方面进行了分析和比对。
通过调研比对和分析,本次实验设计采用固定翼无人机。选择的无人机的内部代号为TC-01,最大有效载荷为80 kg,电压为直流28 V,输出功率为680 W,相对地面的最低飞行高度为75 m,航速为120 km/h~180 km/h,测控半径为20 km(飞行80 m 高度下),最大航行时间为6 h,最大航程为800 km[1]。
1.2 无人机系统框架设计

表1 不同无人机的性能对照
无人机的伽马谱探测分析和寻源空中部分主要包括能谱探测模块、地图导航信息模块、云台运动摄像设备、主控模块、数据传输模块、能力补偿模块、多核处理器模块、锂电池组等。系统框架如图1 所示。
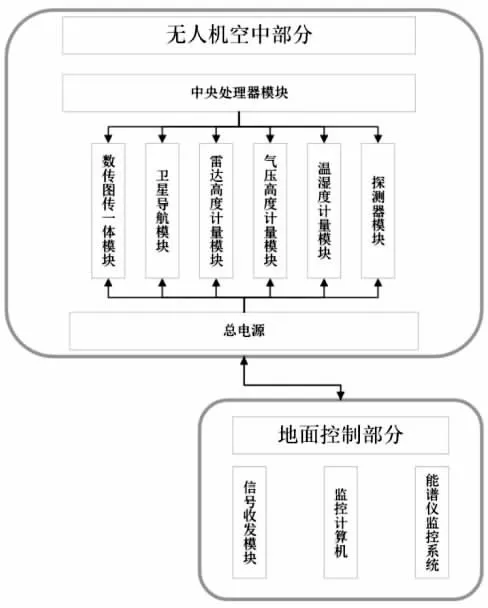
图1 无人机系统框架
根据本次无人机伽马谱探测需求进行设计,无人机空中部分其下侧探测器的体积不小于4.5×10-1m3,上测探测器体积不应当小于5.2×10-2m3。晶体的分辨率采用峰值的1/2 处的宽度(FWHM)与最大峰值能量之比的百分数,以137Cs 为参考,应在0.662 MeV峰时,晶体分辨率应优于12%,测试系统连续工作10小时之后,系统分辨率的测评值变化波动在最初测量值的±0.5%之内。仪器死时间应不大于8 μs,能谱非线性应不大于1.5%,能谱仪的标准窗数据稳定,雷达高度计量范围在0 m~600 m,气压高度计测量范围在0 m~4 600 m,GPS 采 用 航 空型,测量精度为米级及以上,照相、录像设备采用航空型相机,数据收录设备选用带有多通道、数据校准、处理分析等功能的数据自动收录设备和模拟数据收录设备,数字测温计范围在零下45 ℃~120 ℃。无人机地面基站功能包含对机载测量系统所收录的数据进行检查、质量评价、格式转换、复制、校准数据等功能的处理[2]。
2 探测器选择
对于无人机平台的伽马谱探测和寻源来说,能谱探头是无人机伽马谱探测系统的核心部分,特别是在飞行过程中,收集由地面放射出的辐射能量,并通过物理性能将辐射光子转换成为模拟脉冲信号,从而为计算机模块提供可供处理的信息。本文设计的系统,均以采集和分析该信号为主。
由于本研究采用的无人机具有一定较高的行驶速度,为了能够确保无人机平台的伽马谱探测到地面的有效放射源,以100 km/h 速度的无人机为例,则需要探测器拥有每1.2 s 采集1 次的能力。由于采集的时间非常有限,同时还需要采集的信息足够精确,则选择的探测器探头拥有的灵敏度要达到一定水平。
无人机伽马谱探测器能够根据收集到的放射性信号,有效地将K、U、Th 等元素的特征峰进行识别。
在本系统中采用闪烁体探测器,其中,闪烁体探测器可以区分为3 种晶体,分别是BGO 晶体、LaBr3(Ce)闪烁体和NaI(T1)晶体,表2 对其中的3 种晶体的性能指标进行了分析。

表2 各晶体的性能指标
通过分析,并就以下实验需求进行综合考虑:
(1) 为了能够对较低能量的放射源进行探测,并有效地对其伽马谱全面分析,无人机伽马谱探测分析和寻源的晶体探测器应当具有较高的分辨率;
(2) 在对伽马谱能量进行探测时,受探测时间的影响和能量的影响之间的线性范围要大;
(3) 由于飞行的环境较为复杂,其晶体探测器的发光衰减时间应该尽可能的更短,同时还能保证伽马谱能量的转换率不会过低,温度系数也较小;
(4) 具有较强的防震能力,以防在剧烈飞行过程中产生剧烈的碰撞,导致晶体破损;
(5) 具有操作简单、维护简单和低成本等特性。
综上,在无人机伽马谱探测分析和寻源的伽马谱探测中,选择NaI(Tl)晶体作为探测器。
3 主控系统设计
3.1 主控系统选型
无人机平台的伽马谱探测中的主控系统可以采用半数字化能谱主控系统和全数字化能谱主控系统两种设计方案。本次设计采用更为全面的全数字化能谱主控系统,主要考虑到其具备以下优点:
一是抗高计数率和脉冲堆积能力较强。因为采用了大尺寸的NaI 晶体,其脉冲通过率的基础性能并不高,较大体积的能够让脉冲同时到达形成脉冲重叠的概率提高数倍,通过采用活度较大的放射源,能够保障其脉冲通过率甚至高过上述方案;在脉冲通过率31 k 时,全数字化能谱主控系统的能谱采集器在210 kHz 的脉冲通过率下仍能运行。二是能量分辨率相对较高。因为弹道亏损的减小,数字滤波器带来了更好的滤波效果,故谱线的能量分辨率也更好。三是温度稳定性获得了巨大提升。全数字化能谱主控系统的模拟部件关键在于前置放大器,产生谱线的漂移的主要原因就是晶体和前置放大器的温度系数。四是属于松散耦合,故障率大幅降低。全数字化能谱主控系统中每个晶体对应的能谱采集器完全相同,交换简单,有效提升了故障寻源和修复的效率。
3.2 主控系统设计
本次无人机伽马谱探测分析和寻源的主控系统如图2 所示。系统使用的NaI(T1)晶体探测器。能谱采集器都通过专属的RS232 接口与安装于中央控制器上的PCI 转多路串口卡通信,从而实现中央控制器对能谱采集器的控制与谱线获取,中央控制器可通过巡检命令检测实际生产时采用的晶体数量,方便生产的需要。通过磁耦合串口隔离电路与DC-DC 隔离变换电源模块实现了本系统与无人机上电源系统的隔离,大大提高了系统的抗干扰性能。电源变换电路实现将单路航空直流电源变换为多路模拟电源、数字电源等功能。高压模块提供光电倍增管工作所需的稳定负高压,为了提供光电倍增管输出信号的信噪比,采用了多级电子滤波器电路,很好地抑制了高压电源中的交流噪声,提高了信噪比。光电倍增管输出的电流信号通过设计的电流反馈型前置放大器,送入Y/U 双通道16 位数控增益放大电路,通过两个16 位分辨率的DAC 控制高速精密乘法器实现谱漂的精密调节。能谱采集器的核心是由高速ADC 模数转换器和CPLD 可编程逻辑器件组成的数字能谱仪。由于采用了高速模数转换器,因此省略了传统模拟能谱仪中的峰值采样保持电路、成形放大器、基线恢复电路等,并可显著减小系统的死时间,避免了模拟能谱仪温漂的影响,提高了稳定性,且由于采用数字化设计提高了系统的灵活性[3]。

图2 无人机伽马谱探测分析和寻源主控系统
本次无人机伽马谱探测系统采用了基于FPGA的数字化脉冲幅度分析器的设计思路,并考虑从最优化滤波器理论角度进行设计。其输入信号于噪声信号叠加后经过滤波器系统并输出有用信号于噪声信号的示意如图3 所示。

图3 输入输出信号示意
图3 中Si(ω)为噪声的谱密度函数;h(t)为滤波器系统的传递函数;H(ω)为滤波器系统频率响应函数;vi(t)、vo(t)分别为输入信号和输出信号;Vi(ω)、Vo(ω)分别为输入信号和输出信号的频率响应函数;Vn2为噪声均方值。
由图可知,输出信号可表示为:
既定输出信号v0(t)的峰值在tm,信噪比的平方可表示为:

将A(ω)=kB*(ω)带入,信噪比η 取最大值,此时可得到针对任意输入信号的最佳滤波器输出信号频谱为:
当考虑噪声影响,且噪声不是白噪声时,最佳匹配滤波器的频率响应和信噪比分别为式(5)和式(6);式中τc为噪声转角时间,τc=a/b,Q/cf为Vi(t)的电压u(t)常数。
根据式(6)可推断,想要提高信噪比,可以采取以下几种方式:一是选择低频噪声小的器件;二是选择栅极漏电流小的场效应管;三是选用介质损耗较低的电容;四是减少冷电容的使用;五是利用探测器的反向漏电流在低温下可以降低;六是通过降低温度减少热噪声。
因此将上述现象作为一个比较,把其滤波器的信噪比与实际滤波器的最佳信噪比的比值定义为信噪比劣值系数F,因此其滤波器的信噪比为
给定实际滤波器输出信号的信噪比为η,其劣质系数为F,F=η∞/η,F>1,即F 趋近于1 时,滤波器的效果则越好。给定脉冲宽度tx约束下获得最佳信噪比,可以得到该滤波器的输出信号为
4 总结
通过对各类无人机的性能进行了分析,基于固定翼无人机作为设计对象,同时对无人机探测器进行了对比分析,以NaI(Tl)晶体探测器作为探测器设计模块,对主控系统的关键电路,脉冲幅度分析器进行了信号推算。
