工业机器人视觉系统在电气自动化中的应用浅析
2023-09-20谢杨春
谢杨春
(安徽电气工程学校 安徽 合肥 230061)
0 引言
电气自动化控制技术在第三次科技革命后得到飞速的发展,对我国工业生产及国民经济发展产生了显著助推作用,同时促使电气自动化技术得到了深度优化。基于工业互联网下制造业的优化升级改造,我国出现以“互联网+”为重点的新型制造模式,通过大数据、人工智能、移动互联网云计算、物联网等新生代计算机信息技术与制造业的深度融合,推动制造业向自动化、数字化、信息化的“三级跳”转型,加快工业机器人等智能装备所在的智能制造产业链发展,成功建构智能制造专业群[1]。伴随工业机器人在自动化领域的大规模应用,结合视觉检测技术、运动学原理、三角测量法的AI+3D视觉系统,已经被开发成为工业机器人的“眼睛”,在其被普遍使用的过程中,能够充分结合现代电气控制技术、计算机技术,网络通信技术实现控制系统的闭环控制、顺序控制和智能化控制,能有效提升相关领域的电气自动化控制水平,可凭借智能人机交互突破单纯重复既定程序轨迹的限制。还可以根据工业生产变化适时规划工业机器人轨迹,从而提高生产效率和质量,降低人工操作过程中产生的误差大、准确率低、实时性弱、效率低下等弊端与风险[2]。因此,基于工业机器人的机器视觉应用在电气自动化的工业实际生产制造及其控制当中,有着广阔的发展前景。
1 工业机器人视觉系统
1.1 工业机器人概述
现阶段,越来越多基于机器视觉的工业机器人已经被成功应用于工业制造,尤其是在智能制造背景下,作为实现高端制造等的重要一环,工业机器人担任着越来越重要的角色。越来越多的工业场景应用“机器人+”技术,其强大的适应能力能够按照电气自动化控制系统规模和产量进行自适应性组合,能够适应智能模式的工业生产环境,产生事半功倍的作用,提升制造产品的核心竞争力。
面向工业领域的机器人,主要是指多关节机械手或多自由度的机器装置,其具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人的柔性强、自动化程度高、可编程性好、通用性明显,具有自动控制的操作和移动功能,可以完成不同作业环境下的可编程操作。
传感部分是机器的三大部分之一,感知系统和人机交互系统是其六个子系统的重要组成。工业机器人的主要组成框如图1所示。感知系统是多个传感器和控制系统组成主要实现感知与自身工作状态相关的机械量,如位移、速度和力等。视觉感知系统提高了机器人的机动性、适应性和智能化水平。
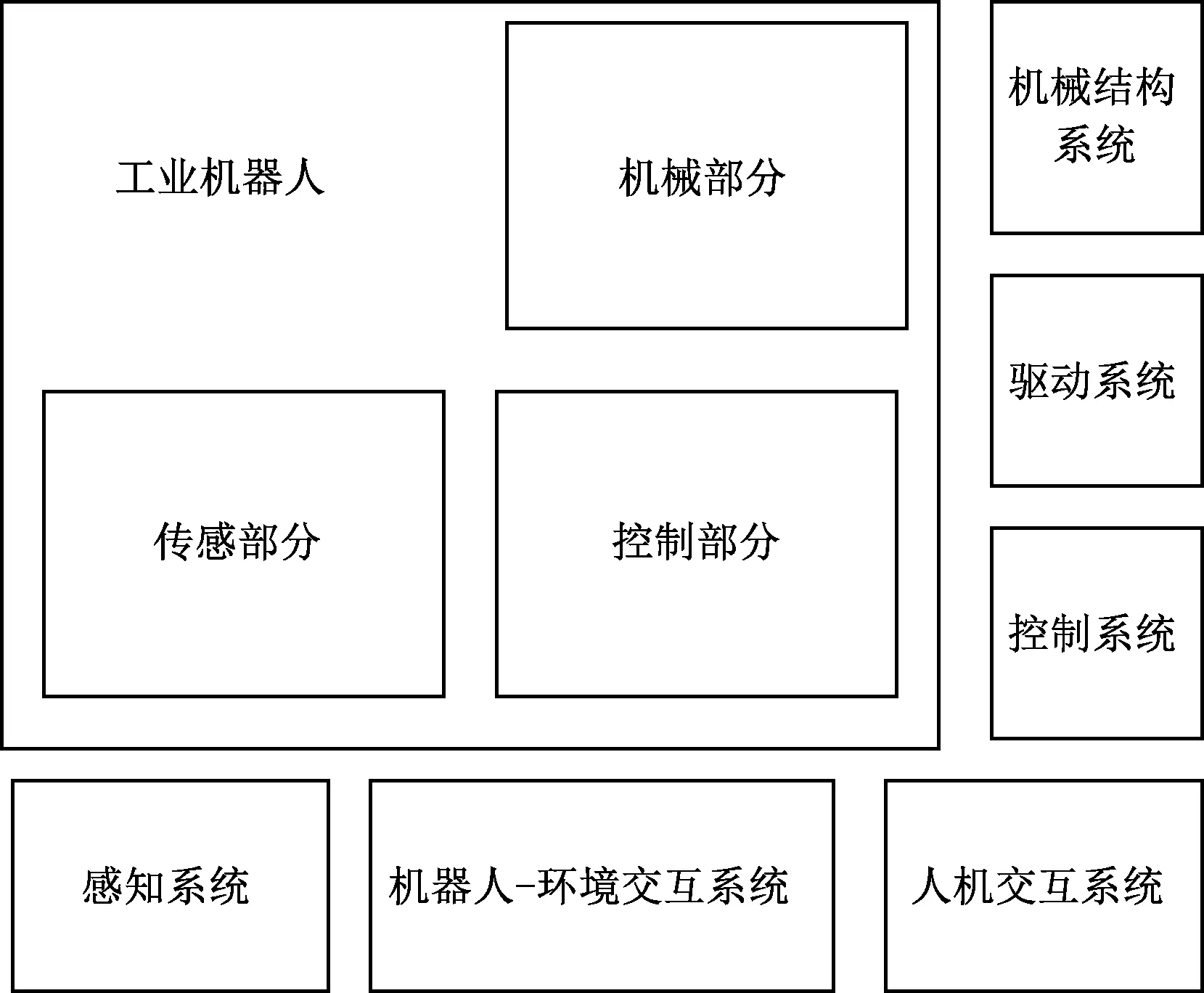
图1 工业机器人的主要组成框图
1.2 工业机器人视觉系统
工业机器人视觉系统主要通过替代“人眼”赋能工业生产,在解决人眼无法准确识别和检测的生产任务过程中,能够有效克服人眼标准的差异性,通过制定更高级别的品控数智化标准,以高速、高光谱、高分辨率、高灵敏度、高可靠性超越人眼标准极限。在视觉定位、尺寸测量和外观识别与检测过程中,工业机器人视觉系统利用光源控制器、摄像头和光学部件、视觉控制系统等进行摄像和拍照,其中,光源控制器、摄像头和光学部件负责获取图像信号后成像,信号成像传送给图像处理系统后转换为数字信号,视觉控制系统根据数字信号运算结果获取目标特征,通过逻辑判断运算结果,输出结果至执行部件,精准控制工业机器人动作。
大部分工业机器人的视觉系统主要经由光源控制器、多个摄像头和镜头、部件传感器、视频捕捉卡(video capture card)、PC平台、检测软件、高速数字I/O板卡和中继器、集线器、交换机和路由器等网络连接设备共同组成,在视觉系统读取、传输和处理信息过程中,与人眼的运动机制一一对应,成为人眼视觉在工业生产过程中的技术延伸[3]。工业机器人的视觉系统通过源控制器、多个摄像头和镜头感应机械臂可以接触的范围,进而保证机械臂正常运行,系统主要由视觉系统(单目、双目、多目、RGB-D)、控制器、控制系统组成,经过大量实验数据证实,单目视觉系统运行的方式,更加适合电气自动化。
工业机器人视觉系统(图像采集设备、CMOS传感器&CCD电荷耦合元件)主要涉及高精度二维视觉定位技术和3D视觉定位技术两类,其中,应用最为广泛的是高精度、高准确率的二维视觉定位技术,这是工业机器人代替人眼最为基础的机器视觉定位技术,具有显著且绝对的应用优势。其能够24 h不间断运转的状态下,将采集到的物体转化为图像信号,根据像素分布、亮度、颜色等信息,利用图像处理系统将其转换成为适应性、可靠性和重复性较高的数字信号,通过各种运算方法提取主要特征,根据判断结果控制工业机器人在不同应用场景中的动作,不仅能够提升工业生产良品率,同时能够加快产线运转效率,属于成熟系统。工业机器人视觉系统有硬件系统和软件系统,其软件系统主要组成如图2所示。
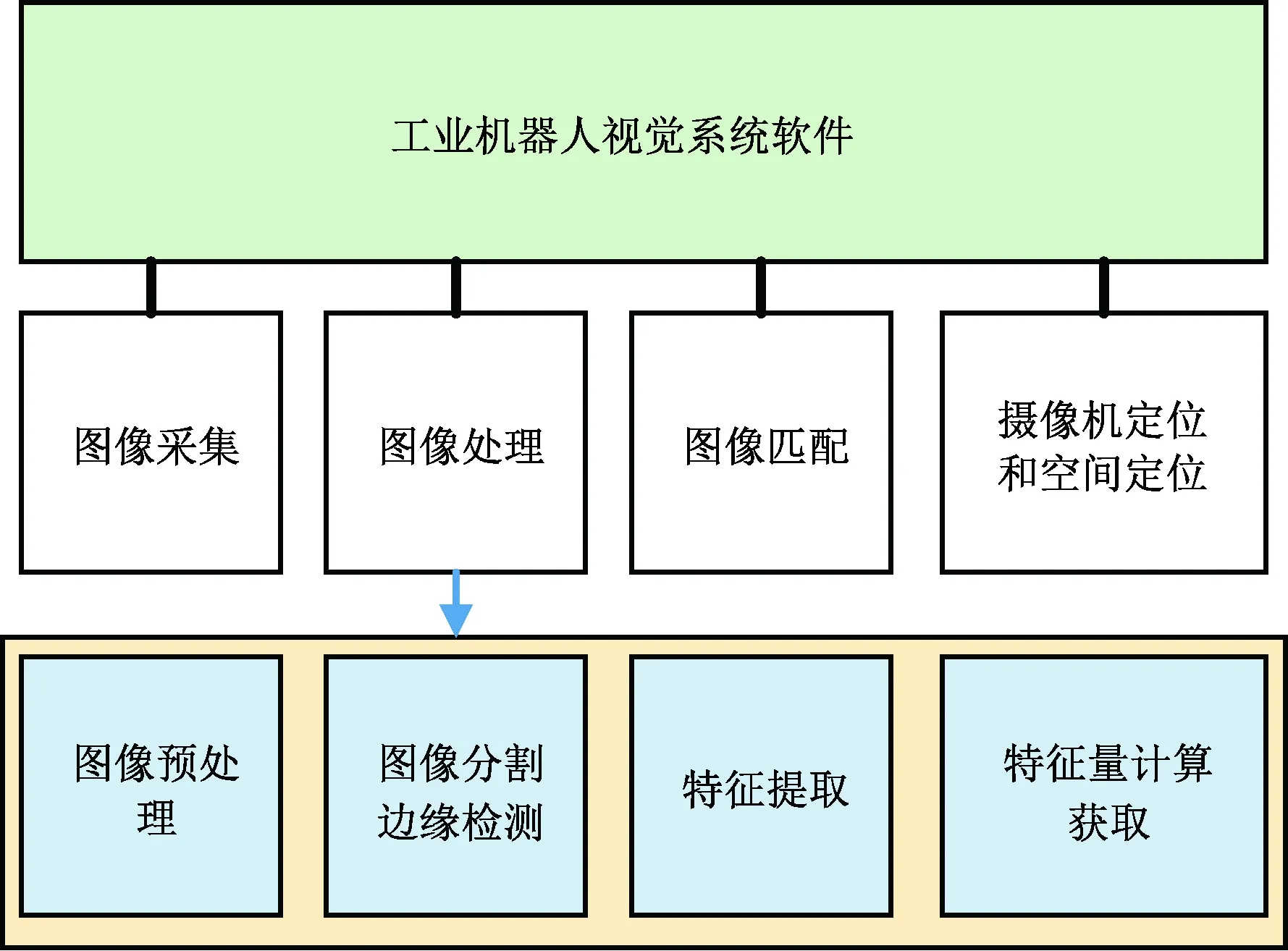
图2 工业机器人视觉系统软件
智能制造把工业机器人与机器视觉紧密结合起来,机器视觉将是人工智能未来的方向和趋势。机器视觉系统的性能由最差的部分决定,精度则由它能获取的信息决定。合理进行配置就可以建立一个零故障、有弹性的工业机器人视觉检测系统。工业机器人的视觉系统运行,首先需要根据目标确定位置,通过二维视觉定位技术和3D视觉定位技术成功锁定目标,其次需要提前进行信息识别明确目标位置,或通过边缘检测引导工业机器人完成动作任务。
2 工业机器人视觉系统在电气自动化中的应用
2.1 识别
工业机器人视觉系统在电气自动化中的识别应用,可以在无接触的前提下,精准甄别目标物理特征,通过视觉处理和运算功能,帮助工业机器人对识别目标的外形、颜色、尺寸、条码等特征做出高准确度识别,进而通过对比、处理场景生成操作指令。在外形识别过程中,为实现自动化生产线检测,工业机器人主要发挥引导抓取和放置操作功能,视觉系统在电气自动化过程中做出准确定位,引导机械臂准确动作[4]。在颜色检测过程中,工业机器人视觉系统通过检测目标外观存在的缺陷、污染物及其他异常情况,保证大批量工业生产过程中的不同目标适配性。在尺寸测量过程中,工业机器人视觉系统能够凭借自动测量技术进行目标外观尺寸的测量,例如表面积、长和宽度等,同时对测量结果进行确定,工业机器人可以从测量数据中准确识别出目标几何尺寸。在光学字符阅读识别过程中,工业机器人视觉系统通过对图像进行处理、分析和理解识别不同模式的目标。例如,针对二维码的识别,工业机器人可以通过视觉系统对不同二维码进行读取,准确跟踪、溯源管理目标,在此过程中,识别速度是衡量视觉系统应用效果的关键指标[5]。
2.2 测量
工业机器人视觉系统综合光学、机械、电子、计算机软硬件等技术,涉及计算机、图像处理、模式识别、AI、信号处理、光机电一体化等不同领域。根据工业机器人视觉系统中的D-H正向运动学模型和微分运动学模型,建立机器人视觉测量模型,通过高精度二维视觉定位技术和3D视觉定位技术将成功获取的图像像素信息,标定成为电气自动化常用的度量衡标准,通过工业机器人的视觉手段测量目标外观尺寸,同时进行目标轮廓、孔径、高度、宽度、间距和面积的测量,通过测量完成工业生产的产线需求,主要应用于电气自动化的高精度、复杂形态测量[6]。例如,通过工业机器人与视觉系统的科学结合,能够完成更加精准的焊接、加工、搬运等工作。焊接机器人的应用十分普遍,具备抗疲劳、高精准、抗干扰特征,应用焊接机器人可以取代人工焊接,确保焊接质量一致性,提升焊接作业效率,直观地反馈焊接作业质量。加工机器人对工作环境要求较低,具备持续加工能力,有能力完成高精度、大批量、高难度复杂加工任务。搬运机器人可以适应电气自动化生产线搬运任务,降低安全隐患的同时,有效减小危险品、辐射品产生的人体伤害。
2.3 定位
工业机器人融合综合导航定位、路径规划、避障、多传感功能,主要借助视觉传感器完成并获取目标的位置信息(二维或是三维),进而借助视觉系统(单目、双目、多目、RGB-D)、摄像头或摄像机、视频信号数字化设备、数字信号处理器等外部设备获取目标图像,通过准确分析进行环境光学处理,压缩成功采集的图像信息后反馈至工业机器人的神经网络+统计学算法构成的系统,经由关联图像信息与工业机器人实际位置完成定位应用。在电气自动化中应用定位操作,可以辅助工作机器人完成装配和执拾取任务等[7]。工业机器人通过视觉系统进行红外线定位导航的工作原理,主要通过红外线IR标识发射带有无线数据的红外射线,通过安装在室内的光学传感器,接收来自不同移动设备所发射的红外射线,进行精准的目标定位,总体造价相对高昂。例如,在工业生产过程中,工业机器人的视觉系统能够快速、准确地确定被测零部件目标的位置,上、下料使用机器人视觉系统做出定位,引导机器人的机械臂准确抓取目标。在一些半导体封装作业中,封装设备需要根据工业机器人的视觉系统准确获取芯片的位置信息,及时进行拾取头的方向调整,在准确拾取芯片目标后实施绑定操作,这就是工业机器人视觉系统定位应用在工业生产过程中最基本的实际应用。
2.4 检测
工业机器人视觉系统在电气自动化中的检测应用主要针对目标表面状态,精准判断目标是否存在缺陷。平板显示器行业主要包括生产LCD拼接屏、LED显示屏、OLED显示屏等不同类型的显示元器件,在工艺流程上较为复杂,其中,LCD拼接屏是主要的显示技术,行业对其生产质量和品控要求极高,工业机器人视觉系统作为0接触、高精度、高速度的技术操作系统,其检测能力成为检测LCD拼接屏的关键技术手段。从前端ITO导电玻璃检测、液晶屏背光模组检测,In-Cell、On-Cell及OGS全贴合屏幕、COG设备、视觉对位全贴合、激光切割机、飞针测试机等,能够显著提升LCD拼接屏生产制造商的核心竞争力[8]。
印制电路板是电子元器件电气相互连接的载体,在行业发展已经十分成熟的当下,行业针对高性能印制电路板的工业制造要求逐渐提升制造标准。随着挠性板、多层板、HDI 板及IC封装基板等印制电路板制造技术的发展,对印制电路板生产工艺提出较高技术制造要求。在印制电路板制造过程中,工业机器人的视觉系统已经得到广泛的技术应用,例如,在菲林AOI激光检测机、PCB 电路板的AOI光学检测设备、PCB板外观检查机AVI、印制电路板内层板AXI测试、PCB板丝网印刷、激光全自动曝光机、SPI串行外设接口设备、打孔机等设备中,工业机器人的视觉定位系统可以凭借应用检测技术,实现快速、精准的目标质量检测和品控过程,提高工业制造过程中的产品生产质量和生产效率,是设备高性能提升的关键性保障。
3 结语
工业机器人的视觉系统能够在电气自动化中实现识别、测量、定位和检测应用,有效降低工业生产过程中的误差,大幅度降低人力资源成本的消耗,降低智能制造的生产成本。随着智能制造对工业生产的要求逐渐提高,工业机器人需要依托工业软件技术、大数据技术、人工智能技术、现场总线技术、工业互联网技术、信息安全技术、可编程逻辑控制器技术、工业机器人视觉技术、数控技术、变频伺服技术、启动液压技术、电工电子技术、传感技术、射频识别技术和视觉技术集成智能制造技术体系,解决由供料、输送线体、加工单元、机器人、仓储、工控、人机交互、机器视觉、数据采集系统等硬件和CAD/CAM/CAE、计算机虚拟仿真、MES、PLM、工控、机器视觉等软件构成的智能制造生产示范线自动化过程中存在的问题,持续优化电气自动化系统,实现大规模定制、生产设备网络化、生产数据可视化、生产文档无纸化、生产过程透明化、生产现场无人化等,最终提升我国电气自动化的发展水平以及中国制造水平。
