纤维包自动除带及拆袋机剪带装置设计
2023-09-20陈俊鹏裴泽光
刘 琰 陈俊鹏 裴泽光
(东华大学,上海,201620)
直行往复式自动抓棉机通常是棉纺生产流程中的第一台设备,其主要功能是从排放在其两侧、呈直线排列的各个纤维包中抓取纤维,并将抓取的纤维块送往前纺的设备进行加工[1]。目前,纤维包排放过程中纤维包外部的打包带和包装袋的去除过程均由人工手动进行操作,劳动强度大、工作效率低,在当前劳动力成本上升、纺织厂用工短缺的背景下,亟需采用自动化的机械装置实现纤维包的排放工作[2]。目前,针对其他领域的自动化剪带与割袋装置已有一些报道[3-7],但对于棉纺工序中纤维包自动化剪带与割袋装置的报道还不多见。在我们的前期研究中,提出了一种面向直行往复式抓棉机的纤维包除带及拆袋机设计[8-9],下面对其中核心的钩带装置和剪带装置的设计作以介绍。
1 钩带装置与剪带装置的结构
为将纤维包外部的包装袋去除,必须先将捆扎在纤维包外部的打包带去除和收集,其主要由纤维包输送机、钩带装置、剪带装置和废带收集装置配合完成,见图1。
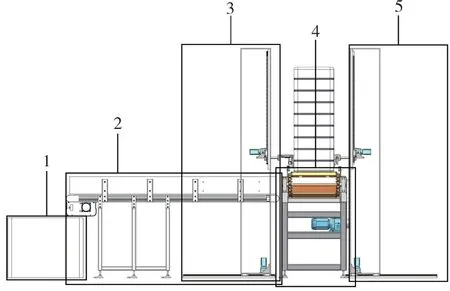
图1 打包带去除和收集装置结构示意图
图2 示出了钩带装置的结构,包括钩带头、钩带头运载机构、箱体和箱体运载机构等。其中,钩带头用于对打包带进行钩取,由钩带压板、滑台气缸、拨叉、卷簧、勾玉状扳机开关及其连接件等构成。滑台气缸安装在钩带压板上顶面上,拨叉安装在钩带压板内侧面,勾玉状扳机开关连接件安装在滑台气缸的滑动体上,以实现自身的横向移动。勾玉状扳机开关安装在勾玉状扳机开关连接件上,同时,开关闸位于拨叉中间位置,卷簧安装在勾玉状扳机开关上,以实现开关的自动复位。至此,滑台气缸能够通过勾玉状扳机开关连接件带动勾玉状扳机开关以及卷簧横向移动,以实现拨叉对勾玉状扳机开关闸上打包带的拨落。
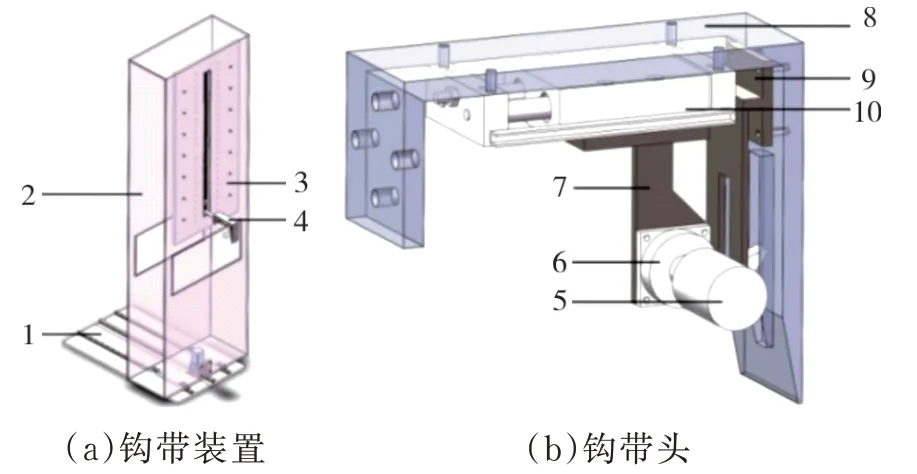
图2 钩带装置的结构示意图
钩带头运载机构和箱体运载机构的结构如图3 所示。钩带头运载机构包括底板、钩带头连接件、滑轨、滑块、齿条、齿轮、电机底座以及电机(含减速器,下同)。钩带头运载机构用于带动钩带头上下移动,其中,滑轨和齿条安装在底板上,电机底座通过滑块安装在滑轨上,以辅助其上下移动,电机安装在电机底座上,齿轮安装在电机的输出轴上,并与齿条相啮合。至此,电机带动齿轮旋转,继而沿齿条上下移动,即带动电机底座、钩带头连接件及钩带头等上下移动。箱体运载机构用于带动箱体横向移动,完成钩带装置靠近、远离纤维包的功能。箱体运载机构包括底板、滑轨、滑块、齿条、齿轮、电机底座及电机。其中,滑轨和齿条安装在底板上,钩带装置箱体通过滑块安装在滑轨上,以辅助其横向移动,电机底座安装在箱体内部,电机安装在电机底座上,齿轮安装在电机输出轴上并与齿条相啮合。至此,电机带动齿轮旋转,继而沿齿条横向移动,即带动电机底座、箱体等横向移动。钩带头运载机构通过底板安装在箱体上,因此也实现了横向移动功能。
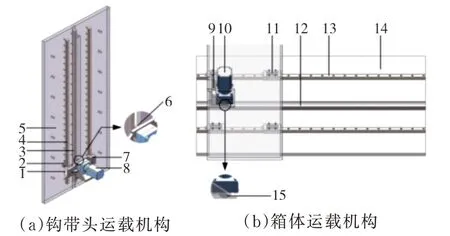
图3 钩带头运载机构和箱体运载机构
图4 示出了剪带装置的结构,包括剪带头、剪带头运载机构、箱体和箱体运载机构等。其中,剪带头用于剪断打包带,其由固定刀具、旋转刀具、剪带头罩体、旋转气缸及其连接件等构成。旋转气缸安装在剪带头罩体上,气缸连接件一端连接旋转气缸的输出轴,另一端与旋转刀具连接,旋转刀具与固定刀具的表面贴合。至此,旋转气缸通过气缸连接件带动旋转刀具旋转,旋转刀具与固定刀具相配合完成剪切功能。剪带头运载机构和箱体运载机构的组成与钩带头运载机构和箱体运载机构的组成一致,剪带头运载机构带动剪带头上下移动,箱体运载机构带动箱体横向移动,完成剪带装置靠近、远离纤维包的功能。
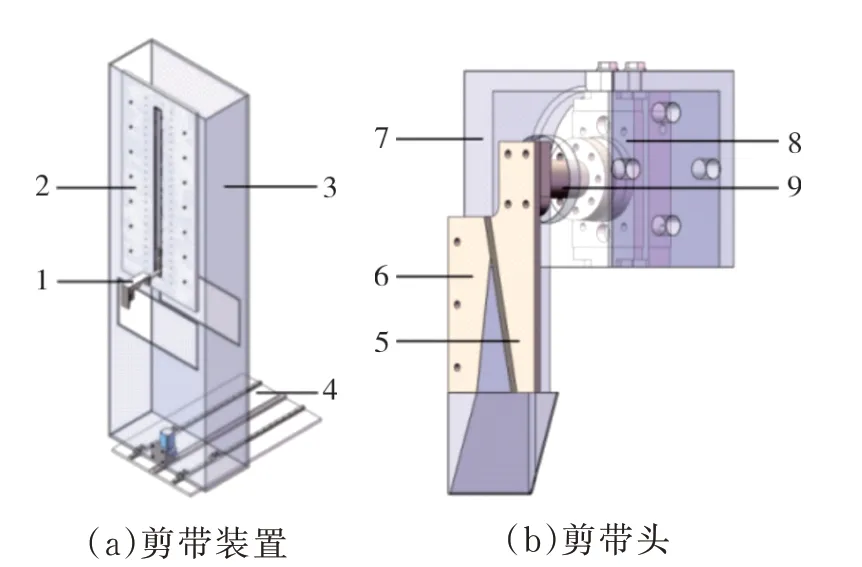
图4 剪带装置示意图
2 剪带头旋转气缸选型
由于绝大多数材料的抗剪强度均小于抗压强度,因此本设计中采用剪切而非压溃的方式实现打包带的剪断,选取旋转刀具与固定刀具配合、旋转刀具绕刀柄上一点旋转完成剪切的方案。剪应力计算见式(1)。
式中:τ为剪应力,FS为作用在剪切面上的外力,A为剪切面面积。
设打包带宽度为19 mm,厚度为1.4 mm,出于计算简便与安全性考虑,在计算剪带动作所需的输出力时,剪切面面积按照A=19 mm×1.4 mm=26.6 mm2计算。设打包带为聚酯材料(参照GH/T 1068—2010《棉花包装用聚酯捆扎带》),其极限剪切强度[τ]=5 MPa,则所需输出力FS≥[τ]·A=133 N。本研究采用旋转气缸驱动剪带头旋转刀具的旋转剪切动作,设旋转刀具的有效工作长度为60 mm,则旋转气缸输出转矩M应满足M≥FS×0.06=7.98 (N·m)。为此,选用CHELIC RTB100 型旋转气缸,其主要参数:扭 矩9.8 N·m,转 动 角 度0°~180°,气 缸 缸 径32 mm,工作压力0.15 MPa~0.70 MPa。
3 剪带头运载机构设计
3.1 电机选型
剪带头运载机构的任务为承载剪带头完成上下移动。上移过程的工作负载主要为剪带头及附属部件的重力,下移过程的工作负载主要为剪带头与纤维包之间的摩擦力与剪带头重力的差值。剪带头及附属部件的质量约为3 kg,一般电机的质量为25 kg,则上移过程的工作负载F1=(3+25)×9.8=274.4 (N),剪带头实现剪带工作的前提是使剪带头的固定刀具进入捆扎在纤维包外的打包带与纤维包之间,这要求剪带头压入纤维包一定深度。参照GB 6975—2013《棉花包装》,塑料包装袋的拉伸强度在25 MPa 左右,取纤维包被塑料包装袋包裹而产生的内部压强为塑料包装袋拉伸强度的10%,即2.5 MPa,则剪带头压入棉包一定深度所需要的正压力FN约为21 250 N。设塑料包装袋为聚乙烯材料,其与钢材间的滑动摩擦因数μ=0.1,计算得到剪带头与棉包间的滑动摩擦力Ff=FN·μ=2 125(N)。因此,下移过程中剪带头运载机构的工作负载F2=Ff-F1=1 850.6(N)。
剪带头运载机构采用电机配合齿轮齿条作为驱动,因此,电机的最大工作负载即为F2。根据电机最大工作负载计算电机输出功率,见公式(2)。
式中:Pd为电机所需的输出功率(kW),Pw为执行机构所需的工作功率(kW),η为电机到执行机构间传动装置的总效率,F为最大工作负载(N),v为执行机构的工作速度(m/s)。
查询相关机械手册,选取传动装置的总效率为η=0.95,剪带头移动速度为0.3 m/s,最大工作负载为F2,代入式(2)则电机工作的输出功率Pd=0.584 4(kW)。为此,选取型号为Y80M2-2的标准电机,其主要参数:额定功率1.1 kW,转速2 830 r/min,效率0.77,质量18 kg。
3.2 齿轮齿条设计
根据齿轮齿条的工作环境和要求,选择齿轮齿条的精度等级为8 级精度,齿轮的材料为40Gr,硬度250HBS;齿条材料为45 钢,硬度220HBS。初定齿轮齿数Z=30,按照接触强度计算齿轮的公称直径,见式(3)~式(5)。按照弯曲强度校核齿轮强度,见式(6)和式(7)。
式中:d1为齿轮公称直径(mm),K为载荷系数,T1为齿轮传递的扭矩(N·mm),φd为齿宽系数,u为齿数比,zH为区域系数,zE为齿轮材料的弹性系数,[σH]为齿轮材料的许用接触应力(MPa);其中,kHN1为齿轮材料的接触疲劳寿命系数,σHlim1为齿轮材料的接触疲劳强度,sH为安全系数。式(3)~式(5)中相关参数查询机械手册如下:K=1.2,φd=0.5,u=∞,zH=2.5,zE=189.8,kHN1=1.2,σHlim1=550,sH=1。代入参数求得齿轮的公称直径为d1≥47.9 mm,再根据齿数计算得齿轮模数m≥1.6,因此取齿轮模数m=2,则齿轮公称直径d1=60 mm。
式中:σF为弯曲应力(MPa),b为齿宽(mm),YFa为齿形系数,YSa为应力修正系数,[σF]为齿轮的许用弯曲应力(MPa);其中,kFN1为齿轮的弯曲疲劳寿命系数,σFlim1为齿轮的弯曲疲劳强度,sF为安全系数。式(6)、式(7)中相关参数查询机械手册 为:K=1.2,b=30,m=2,d=60,YFa=2.52,YSa=1.625,kFN1=1,σFlim1=580,sF=1.4。代入参数得σF=151.5 MPa ≤[σF]。因此,齿轮的弯曲应力小于其弯曲应力极限,齿轮齿根弯曲强度满足要求。
综上所述,所设计的齿轮参数为:齿数30,模数2,直径60 mm,齿宽30 mm,精度等级8,材料40Gr。齿条参数为:长度1 500 mm,模数2,齿宽30 mm,精度等级8,材料45 钢。
4 箱体运载机构设计
箱体运载机构的任务为承载整个剪带装置完成横向水平移动,并使剪带头压入纤维包一定深度。因此,箱体运载机构的工作负载为剪带装置移动时的动摩擦力和使剪带头压入纤维包一定深度所受到的正压力。
箱体运载机构所承载的总质量约为110 kg,底部滑块与滑轨之间的动摩擦因数理论值在0.01~0.02,但在实际应用中,由于安装平行度、为消除间隙采取的预紧等因素,其值会比理论值大很多,因此,通常按照0.15 进行核算。则剪带装置移动时的动摩擦力Ff=110×9.8×0.15=161.7 N,则箱体运载机构的工作负载F=Ff+FN=161.7+21 250=21 411.7(N)。
箱体运载机构同样采用电机配合齿轮齿条作为驱动,因此,电机与齿轮齿条的选型设计与剪带头运载机构中电机与齿轮齿条的选型设计大体一致,计算过程在此不再赘述。最终选择型号为Y132S2-2型标准电机,电机参数:额定功率7.5 kW,转速2 900 r/min,效率0.862,质量72 kg。设计计算得到的齿轮参数为:齿数60,模数2.5,直径150 mm,齿宽75 mm,精度等级8,材料40Gr。齿条参数为:长度1 220 mm,模数2.5,齿宽75 mm,精度等级8,材料45 钢。
5 结论
本研究介绍了一种面向直行往复式自动抓棉机的纤维包拆袋机的钩带装置和剪带装置的结构,对剪带装置进行了设计。根据旋转气缸所需输出转矩对其进行了具体选型;通过剪带头运载机构和箱体运载机构的工作负载和工作速度作出了运载机构的电机选型,根据工作要求分别设计了剪带头运载机构和箱体运载机构的齿轮齿条参数。该装置为有效替代传统的人工除带工作提供了解决方案,得到的结论如下。
(1)剪带头旋转气缸选用CHELIC RTB100型旋转气缸,其扭矩为9.8 N·m,转动角度为0°~180°,气缸缸径为32 mm,工作压力为0.15 MPa~0.70 MPa。
(2)剪带头运载机构电机选取Y80M2-2 型标准电机;齿轮齿数为30,齿条长度为1 500 mm,两者模数和齿宽分别为2 和30 mm。
(3)箱体运载机构电机选取Y132S2-2 型标准电机;齿轮齿数为60,齿条长度为1 220 mm,两者模数和齿宽分别为2.5 和75 mm。