不同头低足高卧位对下肢深静脉血流动力学的影响
2023-09-19胡谢佳喻晓芬
胡谢佳 喻晓芬
达芬奇机器人手术系统(DVSS)以3D高清可视系统扩展手术视野,弥补传统腹腔镜平面视野缺陷,使术野更清晰、真实;多向仿真机械手腕操作及过滤主刀医生手部震颤弥补传统腹腔镜器械灵巧度缺陷,使操作更稳定、分离更精细、缝合更精准,有利于更好地保护重要解剖结构,重建脏器生理功能,已经广泛应用于泌尿外科手术领域[1-2]。第三代DVSS辅助腹腔镜下尿路手术时,床旁移动平台由患者尾侧置入,手术体位采用患者双下肢外展60°~70°的分腿卧位,为充分利用重力作用及器官间隙与潜在腔隙暴露手术视野,术中需最大限度调整手术床的头低足高倾斜度。DVSS辅助腹腔镜手术中二氧化碳气腹、强迫手术体位、手术操作、麻醉及疾病性质等多种因素可增加血液粘稠度、损伤静脉内膜、延缓下肢静脉血液回流,诱发下肢深静脉血栓(DVT)[3]。DVT是引起继发肺血栓栓塞症(PTE)的主要血栓来源,一旦发生PTE,如果诊治不及时,患者预后极其凶险,是院内非预期死亡的重要原因,因此积极采取综合预防措施非常重要[4]。本研究采用招募健康志愿者的方式,比较DVSS辅助腹腔镜下尿路手术两种体位对股静脉血流动力学的影响,为其在临床应用中提供可行性和实用性。
1 资料与方法
1.1 一般资料 本研究经本院伦理委员会审查并批准,测试前志愿者均详细了解实验方案并签署知情同意书,符合《赫尔辛基宣言》要求。纳入标准:(1)自愿参加并配合研究需要者;(2)双下肢活动正常者;(3)体质指数在正常范围(18.5~23.9kg/m2)者。排除标准:(1)主诉有慢性静脉功能不全、深静脉血栓形成史或左侧下肢静脉曲张手术史、腿部溃疡、肿瘤、手术史者;(2)下肢静脉彩超检查,存在血管狭窄、深静脉血栓或反流严重者;(3)伴有基础疾病包括高血压、糖尿病、血管炎等者。(4)头低足高卧位持续时间未达到实验要求者。共招募健康志愿者96名,包括医生、护士、实习生、转运工人、保洁工人等各岗位人员,其中男57例,女39例;年龄23~58岁,平均(36.7±10.3)岁;体质指数19.1~23.9 kg/m2;平均(22.4±1.0)kg/m2。
1.2 方法 采用自身对照研究。(1)测试前,告知志愿者研究目的及实验流程,以便取得志愿者配合,并保持测试环境安静,1名通过培训的研究者实施体位安置,1名通过培训的研究者调查志愿者的舒适度。(2)实验用手术床的头板与背板衔接处,背板与腿板衔接处,左腿板与右腿板能活动;体位用品:角度测量器、膝枕、头枕各1个,肩挡及肩挡固定器、马镫形多功能腿架(OTJ-001,天津)及固定器各2个,约束带2根,棉垫6块,45 cm×25 cm×12 cm海绵软枕1个。(3)体位安置前评估志愿者髋关节、膝关节活动范围,是否有青光眼等高眼压病史。(4)平卧位:志愿者头部置头枕,头和颈椎处于水平中立位,上肢掌心朝身体两侧,肘部微屈中单固定,膝下垫膝枕,膝关节上5 cm约束带固定,松紧以容纳1指为宜。(5)头低足高截石位:在平卧位的基础上,双侧肩部置棉垫后用肩托固定,大腿根部齐背板边缘,髋关节平面放置马镫形多功能腿架,托腿板调整至合适角度后将志愿者腓肠肌置于垫有睹喱垫的托腿板上,要求双下肢外展60°~70°,膝关节弯曲110°~120°,询问志愿者的舒适度,直至志愿者主诉舒适,约束带妥善固定膝关节下3~5 cm处,双侧腘窝及约束带与皮肤接触处安置棉垫在低平截石位的基础上,将手术床调节成头低足高25°~28°后头背板抬高10°~12°,体位安置完毕用量角器测量体位角度,确保体位角度正确。(6)头低足高小腿下垂式反弓分腿卧位(以下简称:反弓分腿卧位):在志愿者枕颈部安置45 cm×25 cm×12 cm的海绵软枕,双肩紧贴枕头边缘,膝关节置手术床腿板与背板衔接可活动关节处,头、颈椎及双上肢安置与平卧位相同,两块活动腿板平行外展30°~35°,使两下肢成60°~70°夹角,膝关节下3~5 cm处用约束带妥善固定,双侧腘窝及约束带与皮肤接触处安置棉垫,调整手术床为头低足高25°~28°,头背板抬高10°~12°,双腿板向下调节使膝关节屈曲120°~130°,要求大腿保持水平,以膝关节为支点,小腿自然下垂,即成为反弓分腿卧位,体位安置完毕用量角器测量体位角度,确保体位角度正确 。
1.3 超声检查 采用美国ATL公司生产的超声诊断仪(HDll000),用4.0 Mhz超声探头,在接近下肢卵圆窝和耻骨结节外下方3.5 cm,于大隐静脉汇入股静脉处近侧端,通过二维超声横切测量左侧股静脉内径(D),后调整探头至指定方位(与血流夹角52°),应用脉冲多普勒检查测股静脉血流速度(V)。
1.4 评价指标及资料收集方法 (1)依序测定志愿者平卧位、头低足高截石位、反弓分腿卧位各15 min时左侧股静脉内径及血流速度,利用公式Q=Vπ(D/2)2计算出左侧股静脉单位时间的血流量(Q)。(2)舒适度:自行设计舒适度数字评分表,分为3级。0级:无不适;1级:不舒适,腰背部有轻微酸痛感或有肢体受牵拉感,但能够忍受;2级:严重不适,腰背部酸痛较重,甚至出现恶心、呕吐、头晕、心悸、肢体麻木等症状。志愿者测试血流动力学指标后,入示教室,1名固定研究者采用统一指导语向志愿者解释调查目的、意义及问卷填写方法,志愿者独立填写,若志愿者对问卷条目存在疑问,由研究者采用统一指导语讲解,若志愿者独立填写存在困难,由研究者不加任何暗示地朗读,志愿者独立做出选择,当场回收,共发放调查问卷96份,回收有效问卷96份,有效回收率100.00%。
1.5 统计学方法 采用SPSS 26.0统计软件。计数资料以n或%表示,组间比较采用χ2检验或Fisher确切概率法;计量资料以()表示,组间比较采用方差分析(ANOVA),使用Bonferroni’s进行多组比较。P<0.05为差异有统计学意义。
2 结果
2.1 3种体位左侧股静脉血流动力学变化比较 见表1。
表1 3种体位左侧股静脉血流动力学变化比较[(),n=96]

表1 3种体位左侧股静脉血流动力学变化比较[(),n=96]
注:与反弓分腿卧位比较,*P<0.001
体位股静脉内径(mm)平均血流速度(cm/s)平均血流量(mL/s)平卧位7.45±0.22*23.38±1.59*10.16±0.61*头低足高截石位7.37±0.26*23.95±1.69*10.18±0.49*反弓分腿卧位7.11±0.2027.59±1.9411.00±1.04
2.2 3种体位舒适度比较 见表2。
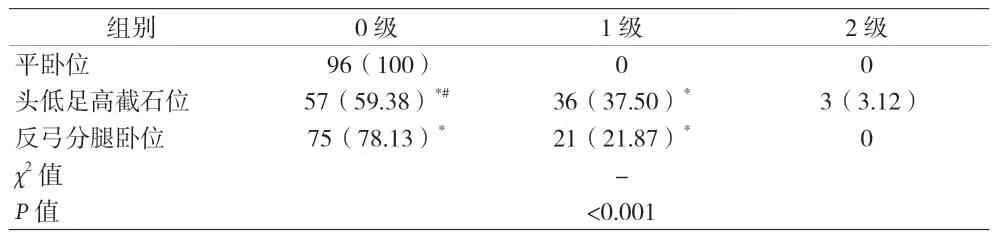
表2 3种体位舒适度比较[n(%),n=96]
3 讨论
静脉血流滞缓、血液高凝状态以及静脉壁损伤是DVT形成的三要素,下肢是最常见的DVT发生部位,下肢DVT因其较高的致残率、致死率是围术期重点防治的并发症之一[5]。手术造成血液成分的改变,可激活发生VTE的三要素[6],手术患者术后发生下肢DVT的风险高达20%~70%[7],有效的早期预防,可使DVT发生率降低30%~80%[8-9],其中基础预防是预防DVT的基础形式和有效方法[10]。护理行为可直接影响患者DVT的发生率和治愈率[11]。
本研究结果发现,志愿者反弓分腿卧位时股静脉内径较平卧位、头低足高截石位明显变细,平均血流速度及平均血流量增加,差异均有统计学意义(P<0.001)。头低足高卧位时,在重力作用下,下肢静脉血流速度加快,血流量增加,股静脉直径变细,截石位时髋关节外展、外旋,可能牵拉甚至挤压股静脉,造成股静脉直径变细,血流速度变慢,血流量减少,血液回流受阻,血液瘀滞,继之股静脉直径扩张,股静脉直径扩张可使血管发生微撕裂,导致胶原纤维暴露[12],为下肢静脉血栓形成提供条件;反弓分腿卧位时大腿保持水平,髋关节处于生理功能位,避免了大腿处形成角度对髋关节和大腿肌肉、骨骼造成牵拉,同时腿部得到了良好支撑,有效地分散了腿部的重量,以膝关节为支点,避免了腓肠肌支撑腿部所有重量所致的腓肠肌压力增加等缺陷;另一方面,平卧位时腰背部及肢体处于生理功能位,因此志愿者均未感到不适,头低足高截石位依靠肩托受力点组织对抗重力作用下产生的体位向头侧滑脱的力量,肩托部受力点组织受压增加了不舒适感,反弓分腿卧位依托小腿下垂与躯干形成反弓状态,避免头低位重力作用产生体位向头侧滑脱的可能,同时双肩紧贴安置在枕颈部枕头的边缘,利用患者自身力量固定了肩部枕头,进一步对抗重力作用产生体位向头侧滑脱的力量,避免了因肩托部受力点组织长时间受压导致的不舒适感。机器人辅助腹腔镜下尿路手术术中人工气腹使腹内压力增加,直接压迫下腔静脉及两侧髂静脉,双下肢及盆腔静脉血液回流受阻;另一方面机器人辅助腹腔镜下尿路手术在全身麻醉下实施,全身麻醉可导致周围静脉扩张,术中使用肌松药物,使肌肉松弛,收缩功能丧失,静脉回流明显减慢,静脉血液瘀滞。本研究结果显示,在机器人辅助腹腔镜下尿路手术中采用反弓分腿卧位较头低足高截石位,能在一定程度上缓解人工气腹及全身麻醉导致的下肢静脉血液回流受阻。
在机器人手术中,保证患者体位安全是手术室护理人员的重要职责[13]。机器人手术体位既要保持人体正常的生理弯曲及生理轴线,维持各肢体、关节的生理功能体位,防止过度牵拉、扭曲及血管神经损伤[14],又不能阻碍机器人通道、观察机械臂的移动,同时需满足医师的手术要求,不能造成患者的损伤或机械臂的损害等,既是机器人手术体位安置的要求,也是预防DVT的基本预防措施之一。本研究结果来自于健康志愿者,其与手术患者在生理状况、身体机能等方面存在一定差异,同时,本次研究的志愿者BMI在正常范围内,因此,DVSS辅助腹腔镜下尿路手术的肥胖患者,反弓分腿卧位的安全性有待研究。本研究团队下一步将针对以上问题,进行进一步的研究,以期为反弓分腿卧位在机器人辅助腹腔镜下尿路手术术中提供更加充足的数据支持和临床应用资料。
